










2014-11-11 Tue
最後のチェックと調整がほぼ終わりました。センサーまわりがうまくいきませんでした。原因を特定する
のにオシロでフォットカプラーの出力部分を見てみましたが、
接近するときと離れるときに、きちんとのこぎり型のパルス
がでてました。
立ち上がりの割り込みが一度しかかからなかったので、
センサーが一度働くと、フォットカプラーの出力で、電流が
0にならない状態なのかと思いましたが、原因はPICのよ
うでした。
一度Hightになるとどうしてか、Lowにならならなくて、立ち
上がりパルスの割り込みがかからないようでした。
対応策がわからなかったので、入力方法を、
アックティブハイからアクティブローに切り替えてみました。
すると、やっと、思った動作ができるようになりました。
問題を特定するのに、ネットで検索しましたが、やはり同じような
原因でなやんでいる方がいたようです。同じTLP621での投書
がありました。解決策は書いてありませんでしたが、きっと
TLP621の問題といいうよりは、PIC側の問題だったんでしょうね。
ケースに組みこんで、電気部分はほぼ完成です。
あとは、旋盤に取り付けるハードを作成します。
スイッチでのオンオフ、センサーでの逆転、の様子です。
ちょっと満足してます。
2014-11-09 Sun
基盤が組みあがり、プログラムを書き込んだPICで、試運転しました。最初、全く動きませんでした。
細かい部分をチェックしていくと、配線の間違いやら、配線
を忘れたところやら、プログラムの間違いやら、けっこうあり
一つ一つ修正してきました。やっと、下記の動作ができるように
なりました。
正転・逆転・ストップ・回転数の変更
やってることは、たいしたことなく、アナログのスイッチ等で
制御すれば簡単だと思いますが、これも自作の醍醐味です。
まだセンサーによる逆転の部分のテストがすんでいませが、
やっと先が見えてきました。
今回、一番のネックになったのが、やはり、フォットカプラーです。
センサーが最低電圧で12Vで動作で、PICが5ボルトですから、
フォットセンサーで、電位差をならす必要がありました。
使ったのは、秋月のTLP621というフォットカプラーです。

適当に選らんだのですが、入力したパルスをオシロで見て
見ると、立ち下がりがシャープでなくなります。

赤の形状になっています。きっと、反応が鈍いのでしょうね。
デジタルタイプのカプラーもあるそうですが、こちらが、
きっと、もっときれいな形状になるんでしょうね。
2014-11-08 Sat
ハードの作成と、プログラムの作成を同時に進めてきました。やっと、制御部分のPICのプログラムとハードのテストがいい
結果になりました。
テストボードで、ハードの仮組をし、ソフトを確認しながら、手を
加えて、プログラムを作成しました。
今回は、PICを二つ使ってます。なんとも、もったいない使い方
で、プログラムは、容量の20パーセントぐらいしかつかって
ません。余分なコメントもありますが、掲載します。
制御プログラム----main.c
今回のプログラムは、タイマー0の割り込みと外部割り込み
を使ってます。
当初、押しボタンスイッチは、スタートとストップだけでしたが、
急遽、リセットの押しボタンスイッチを追加しました。
この、コントローラーは、ステッピングモーターの回転数と
正転・逆転のコントロール、センサーで正転から逆転への
切り替え、の動作を制御するだけです。
自動で
正転→センサーで逆転
手動で
正転 逆転 停止
これだけの動作です。パルスをカウントして、その分だけ
戻るようにすれば、停止も自動でできますが、ちょっと面倒
ですね。確か、ワンパルスで1.8度ぐらい回転しますので、
一回転には、360÷1.8=200パルス。
リードが2ミリとすると5cm動くのには、
200×50mm÷2=5000パルス往復では、
5000×2=10000パルス。
このくらいのパルス数なら、それほど苦労しなくてもカウント
できそうですが、まあ、この次の課題ですね。
ちなみに、unsigned int の整数だと
0 ~ 65535
カウントが可能ですので、Long型の整数を使わなくても
大丈夫のようです。ここまで細かいプログラムを組むと、
CNCになってしまうので、CNCにしてしまったほうが楽
でしょうね。
2014-11-06 Thu
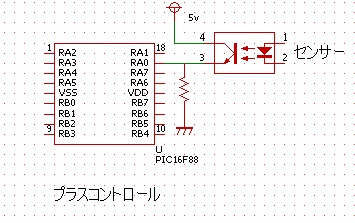
今日もまた一つ勉強。センサーをフォットカプラー接続して、センサーのON-OFFを
フォットカプラーを介して、PICに取り込む簡単な回路とプログラムで、
実験しました。
PICじゃなくて、LEDを接続して実験すると、センサーのON-OFF
でLEDのLED-OFFができるのに、PICに接続すると、PIC入力端子
のレベルが、HIGHT(ON)、LOW(OFF)に変化しませんでした。

問題を切り分けるのに、あれこれやりましたが、マイナスコント
ロールするとうまくいきます。

プログラムで、入力端子の初期設定で、LOWレベルにしても
LOWになりません。
あれこれ悩みましたが、ソフトの原因ではなくて、ハードの原因の
ようで、電源を入れると入力端子がHIGHTになるようでした。
教科書のように、プルダウン抵抗を入れてみました。
すると、電源投入直後も、入力端子がLOWレベルになり、思った
動作ができるようになりました。
プルダウン抵抗やプルアップ抵抗が必要だと教科書には、
書いてありますが、その意味がやっと
分かりました。
2014-11-03 Mon
だいぶ先が見えてきましたが、全体をまとめるあたって、今回は、回路図を書きました。
細かい計算等はしていませんので、動かなかったら、変更です。
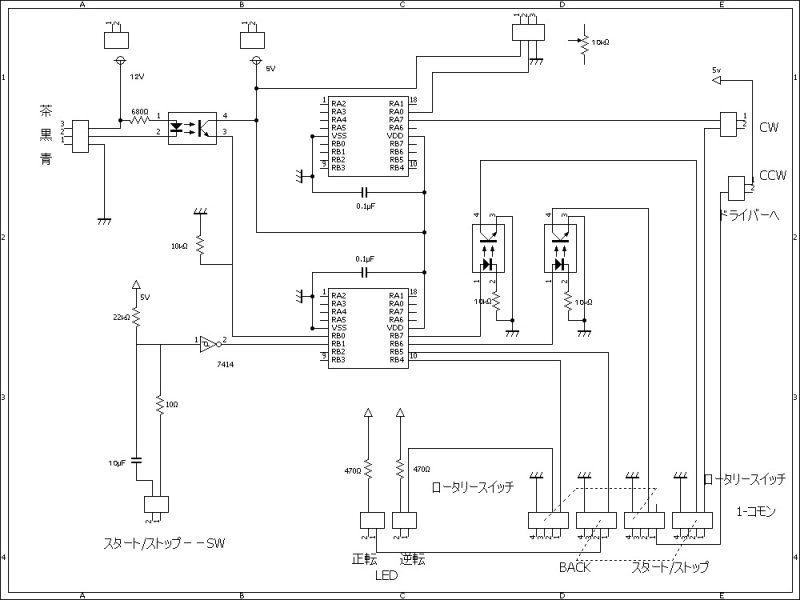
こうやって、計画的に部品等を配置すれば、きっと仕上がりも、
それなりに仕上がるんでしょうね。
一つ一つ動作を確かめて、作ってますが、フォットカプラーから、
PICへの入力部分と、PICからフォットカプラーを介して、
ドライバーへの入力の部分の動作がまだです。
明日は、フォットカプラーから、PICへの入力部分のテスト
です。
2014-11-01 Sat
AD変換によるステッピングモーターの速度制御をあきらめてましたが、割り込みとの組み合わせて、なんとか、
240hz~1300hz
のパルスの生成ができるようになりました。
ステッピングモーターに接続して回してみると、見事、かなり低速
から、結構高速、まで、制御できました。プログラムのソースコード
を掲載します。参考になるかは、わかりませんが。
デバック用につけているLCDのモジュールとヘッダーファイルも
掲載しますが、ここのHPを参考にさせていただきました。
速度変更----------main.c
デバック用LCD表示----- lcd.c
LCD表示用ヘッダーファイル--lcd.h
このHPに出会わなかったら、ここまではできませんでした。
実際にステッピングモーターを回してみると、加速や減速の
過程で、昔の地下鉄電車の様な音がでます。
あまりよく見えないのですが、ステッピングモーターのコントロール
に入れている周波数もオシロで同時に映してみました。
高速になるにつれて、パルスの幅が狭くなり、周波数が高く
なるのが、なんとなく分かります。
スピードコントロールのめどと、シュミットトリガーを入れたスイッチ
の調整ができましたので、正転と反転のコントロールと、スタート
ストップのコントロールのプログラムの
作成に移ります。
2014-11-01 Sat
===TMR0の罠===はまりました。TMR0の設定で、まるまる2日間。初期設定が
プログラムに反映されませんでした。
他の設定がだめなのか、制約があるのかネットで検索しま
くりましたが、ヒットなし。お助け掲示板に書き込みました。
しつこく検索続けていると、問い合わせのHPの過去記事に、
「TMR0」の設定は、一回オーバーフローするともとに戻る。
1回だけ有効の記事。目からうろこでした。
プログラムを書き換えると、見事思った動作。思わず、
「やった」と叫びたくなりました。
丸二日間、悩みました。
TOP PAGE △