 Home
Home Item
Item 怴婯搳峞
怴婯搳峞 傾儖僶儉
傾儖僶儉 儚乕僪専嶕
儚乕僪専嶕 夁嫀儘僌
夁嫀儘僌 Topic
Topic Notice
Notice Admin
Admin
48帪娫埲撪偺婰帠偼  偱昞帵偝傟傑偡
偱昞帵偝傟傑偡
偱昞帵偝傟傑偡
怴惂屼敔姰惉
 偍媣偟傇傝偱偡丅
偍媣偟傇傝偱偡丅偦傠偦傠丄憆偑柧偗偨偐偲巚偄搳峞偟傑偡丅
埲慜嫵傢偭偨僾儘僌儔儉偱偡偑丄摉帪丄壗屘僼儔僢僌傪巊偆偺偐堄枴偑暘偐傝傑偣傫偱偟偨丅丂偑丄SW傕怓乆偁偭偰丄僼儔僢僌傪巊傢側偄偲摦嶌偟側偄SW傕偁傞傫偱偡偹丅
崱夞丄埲慜嫵傢偭偨傕偺偲摨偠撪梕偵偟傑偟偨丅
偦傟偲丄僐儌儞僲僀僘偵嫮偄僼僅僩僇僾儔傕巊偄傑偟偨傛丅
偦偟偰丄崱夞偼丄僐儌儞僲僀僘懳嶔偵LC僼傿儖僞乕傪擖傟傑偟偨丅丂杮擔丄岆嶌摦傕側偔摦嶌偟傑偟偨丅
愭偢偼丄戝惉岟偱偡丅偍偐偘偝傑偱偱偡丅桳擄偆偛偞偄傑偡丅
 TR
TR  2021/04/10(Sat) 16:02 No.1772
2021/04/10(Sat) 16:02 No.1772
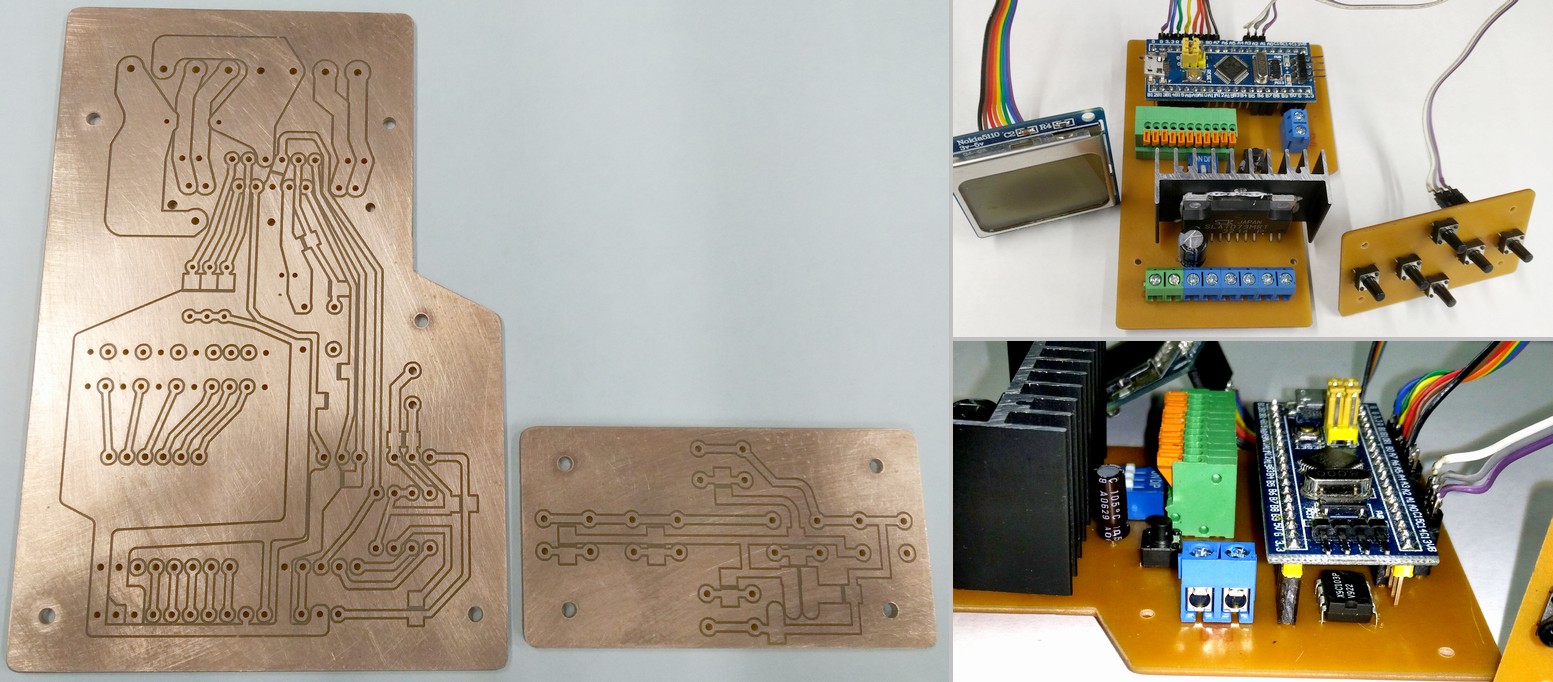
僗僥僢僺儞僌儌乕僞僪儔僀僶
 儐僯億乕儔僗僥僢僺儞僌儌乕僞僪儔僀僶仌僐儞僩儘乕儔傪嶌傠偆偲巚偭偰偄傑偡丅
儐僯億乕儔僗僥僢僺儞僌儌乕僞僪儔僀僶仌僐儞僩儘乕儔傪嶌傠偆偲巚偭偰偄傑偡丅傑偀丄僱僞偲偟偰偼崱峏側傫偱偡偗偳丅
嵟嬤僗僥僢僷乕傕僶僀億乕儔偑庡棳偱偡傛偹丅埲慜偼儐僯億乕儔偑墴偟偰偄偨傛偆偵巚偆偺偱偡偗偳丅
僪儔僀僶傕埨偄偺偼僶僀億乕儔偺傒偱偡丅
僶僀億乕儔側傜丄A4988丄MRV8825丄L6470丄TB6560丄TB6600偲怓乆僪儔僀僶儃乕僪乮儌僕儏乕儖乯偲側偭偰偄傑偡丅
堦曽儐僯億乕儔偼丄憡曄傢傜偢僒儞働儞偺SLA僔儕乕僘埵偱偡丅峏偵儃乕僪壔偼偁傑傝尒摉偨傝傑偣傫丅
偄傗丄傑偀尒偮偗偰偼偁傞偺偱偡偗偳丄https://www.monotaro.com/p/5630/7265/
偱偡丅壙奿偺栺1枩墌偼幮梡側偺偱椙偄偺偱偡偗偳丄乽弌壸栚埨丗44擔乿偱偼偳偆偵傕側傝傑偣傫丅
SEC偝傫偺強傕媥嬈忬懺偱偡偟乧丅
仸愭廡丄乽1屄摦偐側偔側偭偨偐傜尒偰偔傟両乿偲尵傢傟偰丄僆儕僄儞僞儖儌乕僞偺僗僥僢僷乕傪尒偨偺偱偡偗偳丄
僪儔僀僶偑傗傜傟偰偄傞傛偆偱偟偨丅庢傝偁偊偢丄懠偺梡搑偱梡堄偟偰偁偭偨TB6560儃乕僪偱丄僶僀億乕儔愙懕偱夞偟偰媫応傪偟偺偓傑偟偨丅
偱丄挷傋偰傒偰傕丄僆儕僄儞僞儖儌乕僞傕儐僯億乕儔僪儔僀僶偼斕攧偟偰偄傑偣傫丅偦傟偳偙傠偐丄僐儞僩儘乕儔偱巊偭偰偄傞
SG8030傑偱惗嶻拞巭偵側傞偦偆偱偡丅
https://www.orientalmotor-shop.jp/shop/product_details_ec.action?hinmei=SG8030J-D&seriesCd=O000
仸偙傫側偺偑4枩傕偡傞傫偱偡傛偹丅(*_*;
偆偪偺夛幮偺応崌丄傎傏丄掕懍偱夞偡偩偗偱偡丅偦偺掱搙側傜嶌偭偪傖偆偐丄偲偄偆帠偱丄Arduino+1602+帺嶌僪儔僀僶儃乕僪
偲偄偆姶偠偱峴偙偆偲巚偭偰偄傑偡丅
偱丄僪儔僀僶偼SLA7073偐7078偵寛傔偨偺偱偡偗偳丄夞楬恾傪尒偰偄偰巚偄偮偄偨偺偑僇儗儞僩僟僂儞偱偡丅
掞峈抣偺愗傝懼偊偐偀丠偦偆尵偊偽乧
偲偄偆帠偱丄崱夞偼丄揧晅恾偺愒慄晹暘傪X9C偱2抣愗傝懼偊偰摦偐偦偆偲巚偄傑偡丅
仸X9C偼5屄200墌掱搙偱峸擖偟傑偟偨丅
巆擮側偑傜巹偺偼10k兌乮幚應9.0k兌乯偱丄夞楬恾偺1k兌傕偺偱偼偁傝傑偣傫偗偳丄偦傟偱傕丄R1傪22k兌偵偡傟偽30抜奒偵側傝偦偆偱偡丅
傎傏丄0.1A枅偵巜掕偱偒傑偡丅
乮R1傪晅偗側偔偰傕9抜奒偁傝丄偦傟偱傕廫暘側傫偱偡偗偳丅乯
仸幚偼傕偆堦偮MCP42010偲偄偆偺傕埨偐偭偨傫偱攦偭偰偁傝傑偡丅偱傕榚栶偲偟偰偼偪傚偭偲幾杺側傫偱偡傛偹丅
栆媿儘僢僋 2019/07/16(Tue) 00:17 No.1748
Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
栆媿儘僢僋偝傫丆偙傫偽傫偼丅
儗僗抶偔側傝傑偟偨丅
僪儔僀僶乕偺帺嶌偱偡偐丅
偪傚偭偲偆傜傗傑偟偄偱偡丅
偍栶偵偼偲偆偰偄棫偰偦偆偵傕偁傝傑偣傫偑丆
埲慜丆僆儕僕僫儖儅僀儞僪偺
https://www.originalmind.co.jp/goods/07961
偺儌乕僞乕偺僪儔僀僶乕偵偮偄偰丆儊乕僇乕偵栤偄崌傢偣偨偙偲偑偁傝傑偡丅
宆斣摍偼丆幐擮偟偰偟傑偭偨偺偱偡偑丆妋偐丂Yahoo 僔儑僢僺儞僌摍偱丆
彜昳傪徯夘偟偰傕傜偭偨傛偆偵婰壇偟偰傑偡丅
寢嬊崅偄偺偱傗傔偰丆SEC偝傫偺偲偙傠傠偺攦偭偨偺偐側丆
偲巚偄傑偡丅
亖亖亖亖亖
偲偙傠偱丆暿審側偺偱偡偑丆偛嫵帵偍婅偄偱偒傑偡偱偟傚偆偐丅
係亊係偺僉乕僷僢僪偺arduino偺儔僀僽儔儕乕側偑傔偰偄傞偺偱偡偑丆
崱傑偱丆C丂摍偱偼丆傒偨偙偲偺側偄婰弎偑偁傝傑偟偨丅
僱僢僩偱偔偖偭偰傕晄柧偱丆偪傚偭偲摢書偊偰傑偡丅
// TwiKeypad::KeyToChar
int16_t TwiKeypad::ReadReg(uint8_t RegAdr)
{
if(ptw==NULL) return -1;
ptw->beginTransmission(TwiAdr);
ptw->write(RegAdr);
ptw->endTransmission(false);
ptw->requestFrom(TwiAdr,uint8_t(1));
int16_t result=-1;
while(ptw->available()) {
result=ptw->read();
} // while
return result;
} // TwiKeypad::ReadReg
偙偙偺丆乽亅亜乿偼偳偆偄偆堄枴側偺偱偟傚偆偐丅
儗僗抶偔側傝傑偟偨丅
僪儔僀僶乕偺帺嶌偱偡偐丅
偪傚偭偲偆傜傗傑偟偄偱偡丅
偍栶偵偼偲偆偰偄棫偰偦偆偵傕偁傝傑偣傫偑丆
埲慜丆僆儕僕僫儖儅僀儞僪偺
https://www.originalmind.co.jp/goods/07961
偺儌乕僞乕偺僪儔僀僶乕偵偮偄偰丆儊乕僇乕偵栤偄崌傢偣偨偙偲偑偁傝傑偡丅
宆斣摍偼丆幐擮偟偰偟傑偭偨偺偱偡偑丆妋偐丂Yahoo 僔儑僢僺儞僌摍偱丆
彜昳傪徯夘偟偰傕傜偭偨傛偆偵婰壇偟偰傑偡丅
寢嬊崅偄偺偱傗傔偰丆SEC偝傫偺偲偙傠傠偺攦偭偨偺偐側丆
偲巚偄傑偡丅
亖亖亖亖亖
偲偙傠偱丆暿審側偺偱偡偑丆偛嫵帵偍婅偄偱偒傑偡偱偟傚偆偐丅
係亊係偺僉乕僷僢僪偺arduino偺儔僀僽儔儕乕側偑傔偰偄傞偺偱偡偑丆
崱傑偱丆C丂摍偱偼丆傒偨偙偲偺側偄婰弎偑偁傝傑偟偨丅
僱僢僩偱偔偖偭偰傕晄柧偱丆偪傚偭偲摢書偊偰傑偡丅
// TwiKeypad::KeyToChar
int16_t TwiKeypad::ReadReg(uint8_t RegAdr)
{
if(ptw==NULL) return -1;
ptw->beginTransmission(TwiAdr);
ptw->write(RegAdr);
ptw->endTransmission(false);
ptw->requestFrom(TwiAdr,uint8_t(1));
int16_t result=-1;
while(ptw->available()) {
result=ptw->read();
} // while
return result;
} // TwiKeypad::ReadReg
偙偙偺丆乽亅亜乿偼偳偆偄偆堄枴側偺偱偟傚偆偐丅
 mabo 2019/07/18(Thu) 23:06 No.1749
mabo 2019/07/18(Thu) 23:06 No.1749 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
71mm偺僗僥僢僷乕偱偡偐丅戝偒偄偱偡偹丅
乽TRIO偵愙懕偟偰偍巊偄捀偗傑偡丅乿偲側偭偰偄傞偺偱丄SLA7078偱戝忎晇側偺偱偟傚偆丅
偙偺偁偨傝偼敾傝偵偔偄強偱偡偹丅
NEMA23儌乕僞偺戝偒栚偺傕偺偱傕揹棳偼1.5A埲壓偺暔傕寢峔偁傝傑偡丅
偦傟側傜A4988乮嵟戝2A乯傗DRV8825乮嵟戝2.5A乯偱傕丄椙偄傫偠傖側偄偐丠偲傕巚偄傑偡偗偳丄
偦傟傜偼NEMA17愱梡偺婥偑偟傑偡丅
揹棳抣偑掅偄偲偄偆帠偼偦偺暘揹埑偑崅偄丄偲偄偆帠偱丄傛傝敪擬偵宷偑傝懯栚偲偄偆帠側偺偱偟傚偆偐偹丅
捾僒僀僘偺僸乕僩僔儞僋偱偼柍偔丄傕偭偲戝偒偄偺傪晅偗傟偽戝忎晇側偺偐側丠
偄偢傟偵偟偰傕丄儐僯億乕儔偺埨偄僪儔僀僶偼偁傝傑偣傫偹丅
TRIO傕3幉偱49800墌偱偡丅埲慜偺僋儚僩儘偼4幉偱31,290墌偩偭偨偺偵丅
I2C愙懕4亊4僉乕僷僢僪偱偡偐丅
偙傟偭偰丄偟側傉偡偝傫偑嶌偭偨傗偮偱偡偹丅乮拞偼PIC16F1503乯
乽->乿偼傾儘乕墘嶼巕偱偡偹丅
巹傕丄巊偭偨帠偼偁傝傑偣傫丅
幃偺嵍曈偑億僀儞僞曄悢偺応崌偼傾儘乕墘嶼巕傪巊偆偺偩偲巚偄傑偡丅
偨偩丄偙傟偼儔僀僽儔儕懁偱偡傛偹丠
儐乕僓乕懁偼
TwiKeypad A;
偲幚懱傪嶌偭偨屻偼
int data=A.ReadReg(儗僕僗僞傾僪儗僗);
偲偄偆宍偱丄儗僕僗僞傾僪儗僗偵擖偭偰偄傞抣傪庢摼偡傞傫偩偲巚偄傑偡丅
乽TRIO偵愙懕偟偰偍巊偄捀偗傑偡丅乿偲側偭偰偄傞偺偱丄SLA7078偱戝忎晇側偺偱偟傚偆丅
偙偺偁偨傝偼敾傝偵偔偄強偱偡偹丅
NEMA23儌乕僞偺戝偒栚偺傕偺偱傕揹棳偼1.5A埲壓偺暔傕寢峔偁傝傑偡丅
偦傟側傜A4988乮嵟戝2A乯傗DRV8825乮嵟戝2.5A乯偱傕丄椙偄傫偠傖側偄偐丠偲傕巚偄傑偡偗偳丄
偦傟傜偼NEMA17愱梡偺婥偑偟傑偡丅
揹棳抣偑掅偄偲偄偆帠偼偦偺暘揹埑偑崅偄丄偲偄偆帠偱丄傛傝敪擬偵宷偑傝懯栚偲偄偆帠側偺偱偟傚偆偐偹丅
捾僒僀僘偺僸乕僩僔儞僋偱偼柍偔丄傕偭偲戝偒偄偺傪晅偗傟偽戝忎晇側偺偐側丠
偄偢傟偵偟偰傕丄儐僯億乕儔偺埨偄僪儔僀僶偼偁傝傑偣傫偹丅
TRIO傕3幉偱49800墌偱偡丅埲慜偺僋儚僩儘偼4幉偱31,290墌偩偭偨偺偵丅
I2C愙懕4亊4僉乕僷僢僪偱偡偐丅
偙傟偭偰丄偟側傉偡偝傫偑嶌偭偨傗偮偱偡偹丅乮拞偼PIC16F1503乯
乽->乿偼傾儘乕墘嶼巕偱偡偹丅
巹傕丄巊偭偨帠偼偁傝傑偣傫丅
幃偺嵍曈偑億僀儞僞曄悢偺応崌偼傾儘乕墘嶼巕傪巊偆偺偩偲巚偄傑偡丅
偨偩丄偙傟偼儔僀僽儔儕懁偱偡傛偹丠
儐乕僓乕懁偼
TwiKeypad A;
偲幚懱傪嶌偭偨屻偼
int data=A.ReadReg(儗僕僗僞傾僪儗僗);
偲偄偆宍偱丄儗僕僗僞傾僪儗僗偵擖偭偰偄傞抣傪庢摼偡傞傫偩偲巚偄傑偡丅
栆媿儘僢僋 2019/07/19(Fri) 04:37 No.1750 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
栆媿儘僢僋偝傫丆偍偼傛偆偛偞偄傑偡丅
偛愢柧偁傝偑偲偆偛偞偄傑偡丅
巹偺堦斣嬯庤側丆峔憿懱偑傜傒偺墘嶼巕偩偭偨傫偱偡偹丅
傾儘乕墘嶼巕偲偄偆偙偲偱丆偔偖偭偨傜丆
徻偟偄愢柧偺僒僩偁偭偨偺偱丆側傫偲側偔棟夝偱偒傑偟偨丅
亖亖亖亖亖亖亖亖
亜I2C愙懕4亊4僉乕僷僢僪偱偡偐丅
亜偙傟偭偰丄偟側傉偡偝傫偑嶌偭偨傗偮偱偡偹丅乮拞偼PIC16F1503乯
偦偆偱偡丅
儅僩儕僢僋僗偵僟僀僆乕僪巊偭偰側偄埨偄傕偺傪amazon偱丆
拲暥偟偰丆巊偍偆偲巚偄傑偟偨丅
僉乕僙儞僗偺僾儘僌儔儉帺暘偱嶌傞傛偆偐側偲巚偄丆
偟側傉偡偝傫偑偍嶌傝偵側偭偨丆PIC彂偒崬傒偺僾儘僌儔儉偲丆
arduino丂梡偺儔僀僽儔儕乕挱傔偰偄偨偲偙傠偱偡丅
arduino丂偱巊偊偽丆愱梡偺儔僀僽儔儕乕偑偁傞傛偆傛偆偱偡偟丆
I2C偺捠怣傪偡傞偺偵丆wire.h丂傪僀儞僋儖乕僪偡傟偽巊偊傞庤寉偝傕枺椡側偺偱偡偑丆
柍杁偵傕丆傕偺偨傝側偝姶偠偱丆偱偒傞偐偳偆偐傢偐傝傑偣傫偑丆
PIC偱傗傠偆偲傕偑偄偱偄傞偲偙傠偱偡丅
傗傝偨偄帠偼偄傠偄傠偁傞偺偱偡偑丆側偐側偐丆恑傒傑偣傫偹丅
偛愢柧偁傝偑偲偆偛偞偄傑偡丅
巹偺堦斣嬯庤側丆峔憿懱偑傜傒偺墘嶼巕偩偭偨傫偱偡偹丅
傾儘乕墘嶼巕偲偄偆偙偲偱丆偔偖偭偨傜丆
徻偟偄愢柧偺僒僩偁偭偨偺偱丆側傫偲側偔棟夝偱偒傑偟偨丅
亖亖亖亖亖亖亖亖
亜I2C愙懕4亊4僉乕僷僢僪偱偡偐丅
亜偙傟偭偰丄偟側傉偡偝傫偑嶌偭偨傗偮偱偡偹丅乮拞偼PIC16F1503乯
偦偆偱偡丅
儅僩儕僢僋僗偵僟僀僆乕僪巊偭偰側偄埨偄傕偺傪amazon偱丆
拲暥偟偰丆巊偍偆偲巚偄傑偟偨丅
僉乕僙儞僗偺僾儘僌儔儉帺暘偱嶌傞傛偆偐側偲巚偄丆
偟側傉偡偝傫偑偍嶌傝偵側偭偨丆PIC彂偒崬傒偺僾儘僌儔儉偲丆
arduino丂梡偺儔僀僽儔儕乕挱傔偰偄偨偲偙傠偱偡丅
arduino丂偱巊偊偽丆愱梡偺儔僀僽儔儕乕偑偁傞傛偆傛偆偱偡偟丆
I2C偺捠怣傪偡傞偺偵丆wire.h丂傪僀儞僋儖乕僪偡傟偽巊偊傞庤寉偝傕枺椡側偺偱偡偑丆
柍杁偵傕丆傕偺偨傝側偝姶偠偱丆偱偒傞偐偳偆偐傢偐傝傑偣傫偑丆
PIC偱傗傠偆偲傕偑偄偱偄傞偲偙傠偱偡丅
傗傝偨偄帠偼偄傠偄傠偁傞偺偱偡偑丆側偐側偐丆恑傒傑偣傫偹丅
mabo 2019/07/19(Fri) 11:52 No.1751 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
婎斅偺慄傪堷偄偰丄偠傖偁嶍傠偆偐側両偲巚偭偨栴愭偵栤戣偑敪惗偟傑偟偨丅
尰嵼巊偭偰偄傞僐儞僩儘乕儔SG8030S-D偺敿屳姺昳偵偟傛偆偲巚偭偰偄傞偺偱偡偗偳丄
SG8030S-D偺弌椡僋儘僢僋偼30000Hz傑偱僒億乕僩偟偰偄傑偡丅
偠傖偁丄偦偺埵傑偱弌偣傞傛偆偵偟傛偆丄偲巚偭偰偪傚偭偲calc乮僄僋僙儖傒偨偄側傕偺乯偱丄昞傪嶌偭偰傒偨偺偱偡偗偳丄
堦斣挿偔偐偐傞亖抶偄愝掕偵偡傞偲壗偲45000僋儘僢僋偵傕側傞帠偑敾柧偟傑偟偨丅
偙傫側偵側傞偲丄僥乕僽儖乮攝楍乯偵曐懚偟偰丄巊偆栿偵偼偄偒傑偣傫丅
偠傖偁丄1夞偛偲偵師偺廃婜傪寁嶼偟偨傜偳偆偐側丠偲巚偄丄廃婜寁嶼偺傒傪UNO偱寁嶼偝偣偰丄寁應偟偨偺偱偡偗偳丄
偪傚偭偲岺晇傪嬅傜偟偰寁嶼偟偰傕丄堦岦偵懍偔側傝傑偣傫丅嬶懱揑偵偼壓婰偺僐乕僪偱偡丅
float V=100;
float Va=100;
uint32_t target=30000;
long time;
void setup() {
word cnt=1;
Serial.begin(115200);
time=millis();
while(target>V) {
cnt++;
V=V+1000000UL/Va/V;
}
time=millis()-time;
Serial.println(time);
Serial.println(cnt);
Serial.println(V);
}
幚嵺偵寁應偟偰偄傞偺偼
while(target>V) {
cnt++;
V=V+1000000UL/Va/V;
}
偱偡丅師偺(壛懍偟偨)懍搙V傪弌偟偰偄偭偰丄30000Hz傑偱丄壗夞僷儖僗偐偐偭偰丄偦偺帪娫偼壗ms偵側傞偺偐尒偰偄傑偡丅
偦偺寢壥偑
1890ms
44998夞乮僗僥僢僾乯
30000.17[Hz]
偱偡丅1僗僥僢僾偁偨傝偺寁嶼帪娫偑42us傕偐偐偭偰偟傑偄傑偡丅
偱傕丄30000Hz偱偡偐傜丄偦偺懍搙偱偼廃婜偼33.333us偟偐偁傝傑偣傫丅
帺暘偲偟偰偼乽偦傟埲奜偺嶌嬈乿傪峫偊傞偲丄10us掱搙埲壓偠傖側偄偲擄偟偄偲姶偠傑偟偨丅
float偑偄偗側偄偺偐偲巚偄丄uint32_t偵偟偨傝偟偰帋偟傑偟偨偗偳丄岆嵎丄帪娫嫟偵埆壔偟傑偟偨丅
偱丄庤尦偵偁偭偨丄STM32F1儃乕僪(BLUE PILL)偱傗傜偣偨強丄
352
44998
30000.17
7.82us/step
偵側傝傑偟偨丅
側偺偱丄偙偪傜偱峴偙偆偲峫偊偰偄傑偡丅偱傕丄3.3V側偺偱丄1602僉乕僷僢僪傕巊偊傑偣傫丅
乮尦乆僔乕儖僪側偺偱丄UNO僞僀僾偺儃乕僪偠傖側偄偲堄枴偼柍偄偺偱偡偗偳乯
偦偟偰丄X9C傕5V愱梡側偺偱巊偊傑偣傫丅
崱偺強丄昞帵婍偼NOKIA5110偵偟傛偆偲専摙偟偰偄傑偡丅
尰嵼巊偭偰偄傞僐儞僩儘乕儔SG8030S-D偺敿屳姺昳偵偟傛偆偲巚偭偰偄傞偺偱偡偗偳丄
SG8030S-D偺弌椡僋儘僢僋偼30000Hz傑偱僒億乕僩偟偰偄傑偡丅
偠傖偁丄偦偺埵傑偱弌偣傞傛偆偵偟傛偆丄偲巚偭偰偪傚偭偲calc乮僄僋僙儖傒偨偄側傕偺乯偱丄昞傪嶌偭偰傒偨偺偱偡偗偳丄
堦斣挿偔偐偐傞亖抶偄愝掕偵偡傞偲壗偲45000僋儘僢僋偵傕側傞帠偑敾柧偟傑偟偨丅
偙傫側偵側傞偲丄僥乕僽儖乮攝楍乯偵曐懚偟偰丄巊偆栿偵偼偄偒傑偣傫丅
偠傖偁丄1夞偛偲偵師偺廃婜傪寁嶼偟偨傜偳偆偐側丠偲巚偄丄廃婜寁嶼偺傒傪UNO偱寁嶼偝偣偰丄寁應偟偨偺偱偡偗偳丄
偪傚偭偲岺晇傪嬅傜偟偰寁嶼偟偰傕丄堦岦偵懍偔側傝傑偣傫丅嬶懱揑偵偼壓婰偺僐乕僪偱偡丅
float V=100;
float Va=100;
uint32_t target=30000;
long time;
void setup() {
word cnt=1;
Serial.begin(115200);
time=millis();
while(target>V) {
cnt++;
V=V+1000000UL/Va/V;
}
time=millis()-time;
Serial.println(time);
Serial.println(cnt);
Serial.println(V);
}
幚嵺偵寁應偟偰偄傞偺偼
while(target>V) {
cnt++;
V=V+1000000UL/Va/V;
}
偱偡丅師偺(壛懍偟偨)懍搙V傪弌偟偰偄偭偰丄30000Hz傑偱丄壗夞僷儖僗偐偐偭偰丄偦偺帪娫偼壗ms偵側傞偺偐尒偰偄傑偡丅
偦偺寢壥偑
1890ms
44998夞乮僗僥僢僾乯
30000.17[Hz]
偱偡丅1僗僥僢僾偁偨傝偺寁嶼帪娫偑42us傕偐偐偭偰偟傑偄傑偡丅
偱傕丄30000Hz偱偡偐傜丄偦偺懍搙偱偼廃婜偼33.333us偟偐偁傝傑偣傫丅
帺暘偲偟偰偼乽偦傟埲奜偺嶌嬈乿傪峫偊傞偲丄10us掱搙埲壓偠傖側偄偲擄偟偄偲姶偠傑偟偨丅
float偑偄偗側偄偺偐偲巚偄丄uint32_t偵偟偨傝偟偰帋偟傑偟偨偗偳丄岆嵎丄帪娫嫟偵埆壔偟傑偟偨丅
偱丄庤尦偵偁偭偨丄STM32F1儃乕僪(BLUE PILL)偱傗傜偣偨強丄
352
44998
30000.17
7.82us/step
偵側傝傑偟偨丅
側偺偱丄偙偪傜偱峴偙偆偲峫偊偰偄傑偡丅偱傕丄3.3V側偺偱丄1602僉乕僷僢僪傕巊偊傑偣傫丅
乮尦乆僔乕儖僪側偺偱丄UNO僞僀僾偺儃乕僪偠傖側偄偲堄枴偼柍偄偺偱偡偗偳乯
偦偟偰丄X9C傕5V愱梡側偺偱巊偊傑偣傫丅
崱偺強丄昞帵婍偼NOKIA5110偵偟傛偆偲専摙偟偰偄傑偡丅
栆媿儘僢僋 2019/07/22(Mon) 23:42 No.1752 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
栆媿儘僢僋偝傫丆偙傫偽傫偼丅
亖亖亖亖亖亖亖亖亖亖亖
栆媿儘僢僋偝傫偺傗傜傟偰偄傞僾儘僌儔儉丆
側傫偲側偔棟夝偱偒傞偺偱偡偑丆嵶偐偄偲偙傠偼丆
巹偺擻椡挻偊偰傞偐側側傫偰巚偄傑偡丅
張棟懍搙摍偺偙偲傕峫偊側偒傖偄偗側偄傛偆側偺偱丆
偦偺曈丆擄偟偄傫偱偟傚偆偹丅
辍偐愄偱偡偑丆抁帪娫偱張棟偟偨偄傕偺乮僜乕僩張棟乯偑僾儘僌儔儉偺側偐偵偁偭偨偺偱丆
偦偺晹暘偩偗丆巗斕偺傾僙儞僽儔乕偺僾儘僌儔儉攦偭偰丆
C偲儕儞僋偝偣偨偙偲偁傝傑偡丅
僼儘乕僩偺張棟偩偲丆傗偼傝帪娫偐偐傞傫偱偟傚偆偹丅
亖亖亖亖亖亖亖亖亖亖亖
奐敪偡傞偵偼丆辍偐偵arduino宯乮嵶偐偄暘椶傢偐傝傑偣傫乯偑曋棙側傛偆側婥偑偟傑偡丅
僨僶僢僇乕摍巊傢側偔偰傕丆PC偺儌僯僞乕偵彂偒崬傔傞偺偱丅
PIC偩偲丆LCD巊偭偰昞帵偡傞偺偵晄嬶崌偑偳偙偵偁傞偲丆妋偐傔傞偩偗偱傕丆偁傟偙傟峫偊側偄偄偗側偄偺偱丆
柍懯偵帪娫偐偐傞偲巚偄傑偡丅
亖亖亖亖亖亖亖亖
巹偵偼丆
亜側偺偱丄偙偪傜偱峴偙偆偲峫偊偰偄傑偡丅偱傕丄3.3V側偺偱丄1602僉乕僷僢僪傕巊偊傑偣傫丅
偙偺丆3.3V偑丆偪傚偭偲傗偭偐偄偱偟偨丅PIC偵3.3V偺LCD偦偺傑傑偮側偄偱丆攋懝偝偣傑偟偨丅乮娋乯
偙傟偼丆巹偺偍偭偪傚偙偪傚偄丠偺側偣傞媄偱偡偗偳丅乮徫乯
偲偄偆偙偲偱丆俆V揹尮偺
https://www.amazon.co.jp/gp/product/B07C2TCWFD/ref=ppx_yo_dt_b_asin_image_o00_s00?ie=UTF8&psc=1
峸擖偟傑偟偨丅
峸擖偺梊掕側偐偭偨偺偱偡偑丆
https://www.amazon.co.jp/gp/product/B079Q6X5Q6/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1
傪峸擖偟偰撏偄偨偺偱偡偑丆側傫偲丆LCD偼暿攧偩偭偨偺偱偟偨丅乮偑偭偐傝偟傑偟偨丅偙傟傕僩儂儂偱偟偨丅乯
乽僔僃儖乿偲偄偆偺偼丆働乕僗側偺偱偟傚偆偐偹丅
侟zon偼晄恊愗偱偡丅
亖亖亖亖亖亖亖亖亖亖亖
栆媿儘僢僋偝傫偺傗傜傟偰偄傞僾儘僌儔儉丆
側傫偲側偔棟夝偱偒傞偺偱偡偑丆嵶偐偄偲偙傠偼丆
巹偺擻椡挻偊偰傞偐側側傫偰巚偄傑偡丅
張棟懍搙摍偺偙偲傕峫偊側偒傖偄偗側偄傛偆側偺偱丆
偦偺曈丆擄偟偄傫偱偟傚偆偹丅
辍偐愄偱偡偑丆抁帪娫偱張棟偟偨偄傕偺乮僜乕僩張棟乯偑僾儘僌儔儉偺側偐偵偁偭偨偺偱丆
偦偺晹暘偩偗丆巗斕偺傾僙儞僽儔乕偺僾儘僌儔儉攦偭偰丆
C偲儕儞僋偝偣偨偙偲偁傝傑偡丅
僼儘乕僩偺張棟偩偲丆傗偼傝帪娫偐偐傞傫偱偟傚偆偹丅
亖亖亖亖亖亖亖亖亖亖亖
奐敪偡傞偵偼丆辍偐偵arduino宯乮嵶偐偄暘椶傢偐傝傑偣傫乯偑曋棙側傛偆側婥偑偟傑偡丅
僨僶僢僇乕摍巊傢側偔偰傕丆PC偺儌僯僞乕偵彂偒崬傔傞偺偱丅
PIC偩偲丆LCD巊偭偰昞帵偡傞偺偵晄嬶崌偑偳偙偵偁傞偲丆妋偐傔傞偩偗偱傕丆偁傟偙傟峫偊側偄偄偗側偄偺偱丆
柍懯偵帪娫偐偐傞偲巚偄傑偡丅
亖亖亖亖亖亖亖亖
巹偵偼丆
亜側偺偱丄偙偪傜偱峴偙偆偲峫偊偰偄傑偡丅偱傕丄3.3V側偺偱丄1602僉乕僷僢僪傕巊偊傑偣傫丅
偙偺丆3.3V偑丆偪傚偭偲傗偭偐偄偱偟偨丅PIC偵3.3V偺LCD偦偺傑傑偮側偄偱丆攋懝偝偣傑偟偨丅乮娋乯
偙傟偼丆巹偺偍偭偪傚偙偪傚偄丠偺側偣傞媄偱偡偗偳丅乮徫乯
偲偄偆偙偲偱丆俆V揹尮偺
https://www.amazon.co.jp/gp/product/B07C2TCWFD/ref=ppx_yo_dt_b_asin_image_o00_s00?ie=UTF8&psc=1
峸擖偟傑偟偨丅
峸擖偺梊掕側偐偭偨偺偱偡偑丆
https://www.amazon.co.jp/gp/product/B079Q6X5Q6/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1
傪峸擖偟偰撏偄偨偺偱偡偑丆側傫偲丆LCD偼暿攧偩偭偨偺偱偟偨丅乮偑偭偐傝偟傑偟偨丅偙傟傕僩儂儂偱偟偨丅乯
乽僔僃儖乿偲偄偆偺偼丆働乕僗側偺偱偟傚偆偐偹丅
侟zon偼晄恊愗偱偡丅
mabo 2019/07/24(Wed) 23:12 No.1753 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
 PCF8574傪巊偭偨I2C-1602偱偡偗偳丄偁傑傝岲偒偠傖側偄偱偡丅
PCF8574傪巊偭偨I2C-1602偱偡偗偳丄偁傑傝岲偒偠傖側偄偱偡丅昞帵偵偊傜偄帪娫傪嬺偄傑偡丅
100kHz偟偐弌偣側偄偺偵丄1僺儞忋偘傞偺偵傕8價僢僩憲怣偟側偗傟偽側傜側偄偟丄捠怣偺僾儘僩僐儖丠偑4價僢僩儌乕僪側偺偱丄
柍懯偑懡偡偓傑偡丅
懡暘丄廐寧偺杮棃偺I2C-1602偲斾傋傞偲3攞埵偼憲怣夞悢偑昁梫側偺偱偼側偄偱偟傚偆偐丅峏偵懍搙偑1/4側偺偱丄乮廐寧偺偼400倠Hz乯
10攞埲忋丄嶌嬈帪娫偑偐偐傝傑偡丅
巹傕偦偺儌僕儏乕儖偼強桳偟偰偄傑偡偗偳丄巊偆婥偵偼側傜側偄偱偡偹丅74HC595偺曽偑丄傛傝僔儞僾儖偱懍偄偲巚偄傑偡丅傑偀1僺儞憹偊偰偟傑偄傑偡偗偳丅
1602乮捠忢僒僀僘乯偼丄傎傏偦偺傑傑巊偭偰偄傑偡丅
LCD偼働乕僗偵屌掕偟偰丄偦偺僺儞僿僢僟偵儅僀僐儞婎斅傪嵎偟崬傓宍偱屌掕偟偰乧丄偲偄偆偺偑働乕僽儖傪巊傢偢偵嵪傓偺偱妝偱偡丅
偦偆偦偆丄X9C偱偡偗偳丄傛偔専摙偟偰傒偨傜丄BLUE PILL乮STM32F1儃乕僪乯偵嵹偭偰傞3.3V偺揹埑儗僊儏儗乕僞偭偰丄擖椡偼5.5V埲壓側傫偱偡傛偹丅
尦乆UNO偵9V傪擖傟傞梊掕偱偄偨偺偱偡偗偳丄BLUE PILL偼丄奜偐傜偼5.0V傪擖傟偰3.3V傪弌椡偡傞傛偆偵愝寁偝傟偰偄傑偡丅
側偺偱丄偦偺揰傕曽恓曄峏偱丄AC傾僟僾僞丠偐傜5V傪婎斅偵擖傟偰丄偦傟傪棙梡偡傞偙偲偵偟傑偟偨丅
偐偊偭偰丄僇儗儞僩僟僂儞揑偵偼椙偔側偭偨偐傕偟傟傑偣傫丅
仸巹傕偙偺娫丄曽恓偑寛傑傜側偄偽偐傝偵丄柍懯側攦偄暔傪偟偰偟傑偟傑偟偨丅
1602僉乕僷僢僪丂2屄
9V偺AC傾僟僾僞丂4屄
arduino uno屳姺昳丂4屄
LGT8F328P儃乕僪丂丂悢屄
側偳偱偡丅
LGT8F328P儃乕僪偼僯僙ATMEGA328P側偺偱偡偗偳丄攞偺32MHz傑偱弌偰丄僠儑僐僠儑僐崅惈擻偵側偭偰偄傑偡丅偙傟偵偟傛偆偐偲傕巚偭偨偺偱偡偗偳丄僨乕僞僔乕僩偑拞崙岅偺傒偺傛偆側偺偱丄崱夞偼尒憲傝傑偟偨丅
栆媿儘僢僋 2019/07/30(Tue) 23:47 No.1754 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
 庢傝姼偊偢丄婎斅愗嶍仺庢傝晅偗傑偱偟傑偟偨丅
庢傝姼偊偢丄婎斅愗嶍仺庢傝晅偗傑偱偟傑偟偨丅傑偩揹婥偼棳偟偰偄傑偣傫丅
X9C偑尒偊側偐偭偨偺偱丄塃壓夋憸傕擖傟傑偟偨丅BLUE PILL偺壓偵塀傟傞宍偱偡丅
婔偮偐偺彫偝側幐攕偑偁傝傑偟偨偗偳丄崱偺強丄偍偍傓偹弴挷偱偡丅
(偲偼偄偊丄揹婥傪棳偟偨傢偗偱偼柍偄偺偱丄婎斅僷僞乕儞偑惓偟偄偐傕枹妋擣偱偡偗偳)
偱傕丄栤戣偼偙傟偐傜偱偡丅
LCD偺儊僯儏乕傪嶌傞偺偑堦斣柺搢側傫偱偡傛偹丅
崱夞偼弶偺ARM儅僀僐儞側偺偱丄偦偺揰傕僨乕僞僔乕僩偲偵傜傔偭偙偱偡丅
乮擔杮岅儅僯儏傾儖偼偁傞偺偱偡偗偳丄幚嵺偵Arduino IDE偱偳偺傛偆偵婰弎偡傟偽偄偄偺偐丠
儅僀僐儞仌儗僕僗僞偺棟夝偲丄僐儞僷僀儔偺栤戣偲2抜奒偁傞偺偱戝曄偱偡丅乯
栆媿儘僢僋 2019/08/02(Fri) 13:47 No.1755 Re: 僗僥僢僺儞僌儌乕僞僪儔僀僶
 栆媿儘僢僋偝傫丆偙傫偽傫偼丅婽儗僗偵側偭偰丆偡傒傑偣傫丅
栆媿儘僢僋偝傫丆偙傫偽傫偼丅婽儗僗偵側偭偰丆偡傒傑偣傫丅偙偺偲偙傠丆幚壠偺憪姞傝傗傜側傫傗傜偱丆偽偰偓傒偱丆
岺嶌丠偟偰偄傑偣傫偱偟偨丅
栆媿儘僢僋偝傫偺僪儔僀僶乕婎斦丆偄偄偱偡偹丅
CNC偱嶍傟傟偽梋暘側攝慄偟側偔偰傕偄偄偐側偲巚偄傑偡偑丆
側偐側偐丆幚峴偱偒側偄偱偄傑偡丅
巹偺曽傕傗偭偲晹嵽偑偦傠偭偰偒偨偺偱丆壣尒偰偁傟偙傟傗傠偆偐側丆偲巚偄傑偡丅
僉乕儃乕僪偱偡偑丆僟僀僆乕僪偲僶僢僼傽僾儘僌儔儉摍偺偮偄偰偄傞偟側傉偡偝傫偺偲丆
扨側傞儅僩儕僢僋僗偺拞壺惢偺傕偺偲擇偮攦偭偰偟傑偄傑偟偨丅
拞壺惢偺傕偺偼丆僉乕僙儞僗偺僾儘僌儔儉偔傑側偄偲側偺偱丆
偪傚偭偲柺搢偐側偲巚偄傑偡丅
亖亖亖亖亖亖亖
74HC595偺忣曬傕偁傝偑偲偆偛偞偄傑偡丅
偙偺曈丆巹偼丆柍抦偱丆昞帵僗僺乕僪偺偙偲偼丆
峫偊偢偵慖傫偱偟傑偄傑偟偨丅
巹偺応崌偼丆幚梡柺傕偝傞偙偲側偑傜丆偲傝偁偊偢丆帋偣傟偽枮懌側婥帩偪側傟傞偐側偲巚偄傑偡丅
mabo 2019/08/07(Wed) 22:31 No.1756 媈帡掞峈乕侾
 俿俼偝傫丆栆媿儘僢僋偝傫丆偍偼傛偆偛偞偄傑偡丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偍偼傛偆偛偞偄傑偡丅俿俼偝傫丆
亜亜亜adc[(++num)&31] = adconv();
亜懯栚偩偲暘偐傝傑偟偨丅
亜俁俀偵偟側偄偲懯栚両
偱偡偑丆俁俀偵偟偰偟傑偆偲丆侽乣俁侾偑慡晹侽偵側傞偲巚偄傑偡丅
丂丂
傑偨丆俁俀埲忋俇係枹枮偺応崌偼丆丆
丂丂丂俁侾丂仌丂俁俀丂仺仺丂丂侽
丂丂丂俁俀丂仌丂俁俀丂仺仺丂俁俀
丂丂丂俁俁丂仌丂俁俀丂仺仺丂俁侽
丂丂丂俁係丂仌丂俁俀丂仺仺丂俁侽
傒偨偄偵慡晹俁侽偵側傝丆巚偭偨寢壥偵偼側傜側偄偲巚偄傑偡丅
num丂偵丂嵟弶偵侾偑偑擖傞偺丆++num丂偺偨傔偐側丆巚偭偰傑偟偨丅
num++丂偩偲丆巚偭偨寢壥偵側傞傛偆側婥偑偟偰傑偡偑丆
偙偺曈丆偪傚偭偲丆巹帺恎偁偄傑偄側偲偙傠偱偡丅
師偺傛偆偵偡傟偽丆崿棎偟側偄偐側偲巚偄傑偡丅
while (1)乷
丂if(num==32){num=0;}
丂adc[num] = adconv();
丂num++;
}
偦傟偐傜丆
亜僒儞僾儕儞僌傪堦掕娫妘偱丄偲偭偰偄偰偄傞拞丄VR偑曄傢傞偲丄媫绡丄UP/DOWN傪偟丄
亜偦傟偑廔傢傞偲丄傑偨丄僒儞僾儕儞僌傪偡傞丂偲偄偆棳傟偱偟傚両丠
偙偺曈傕傛偔暘偐傜側偄偲偙傠側偺偱偡偑丆
俶倧侾俇俈侾偺僾儘僌儔儉偱偼丆
丂侾夞丂adc丂曄姺偺寢壥傪撉傓丅
丂丂伀
丂撉傫偩寢壥傪夁嫀偺堦偮偲擖傟懼偊偰攝楍偵曐懚偡傞丅
丂丂伀
丂崱傑偱偵曐懚偟偨崌寁傪弌偟偰暯嬒偡傞丅
丂丂伀
丂傾僢僾d僟僂儞偺張棟傪偡傞
丂
偙傟傪孞傝曉偡偲偄偆峫偊曽偺張棟偱偡丅
俿俼偝傫偑彂偄偰偔偩偝偭偨
while (1) {
丂static unsigned int adc[64] = {0};
丂static char num = 0;
丂unsigned int target = 0;
丂for (char i = 0; i < 64; i++)adc[i] = adconv();仺丂攝楍偑adc[0]乣偵偟偨偮傕傝
丂for (char i = 0; i < 64; i++)target += adc[i];
丂target1 = target / 511.5;
丂if (target1 > AD5220_val) {
丂丂丂AD5220_up();
丂} else if (target1 < AD5220_val) {
AD5220_down(); //down娭悢屇傃弌偟
}
丂__delay_ms(1);
}
偺張棟偱偼丆
丂俇係夞應掕偟丆偦傟傪攝楍偵曐懚偡傞丅
丂丂伀
丂俇係夞偺崌寁傪弌偟暯嬒偡傞丅
丂丂伀
丂傾僢僾僟僂儞偺張棟傪偡傞丅
傒偨偄側棳傟偵側傞偲巚偄傑偡丅
俇係夞偛偲偵怴偟偄暯嬒抣傪巊偭偰寁嶼偟偰傑偡偺偱丆
傕偟偐偟偰丆偦偺偨傔偵丆側傔傜偐側曄壔偵側傜側偄偺偐側丆
偲偄偆婥傕偟偰傑偡丅
妋偐傔偰側偄偺偱偡偑丆俶倧侾俇俈侾丂偺傛偆偵丆
夁嫀偺僨乕僞偵晅偗壛偊傞宍偱寁嶼偟偨曽偑側傔傜偐偐傕偟傟側偄偲巚偄傑偟偨丅
屻偱丆斾妑偟偰傒傛偆偲巚偄傑偡丅
亜for暥偵棃偨帪丄宲懕忦審幃傪偡傋偰幚巤偟偨屻丄傗偭偲丄for暥傪敳偗傞偙偲偑偱偒傞偺偱偟傚偆偐丠丠丠丠
偙傟偼丆偦偆偩偲巚偄傑偡丅偨偟偐丆break 暥傪擖傟傞偙偲偱
嫮惂揑偵傕敳偗傞偙偲偑偱偒偨傛偆偵巚偄傑偡丅
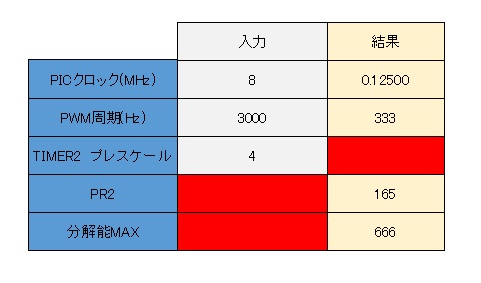
=====捛怢偱偡丅====
僄僋僙儖偱揧晅偺幨恀偺傛偆偵丆
偄偔偮偐擖椡偡傞偲愝掕抣傪寁嶼
偱偒傞傕偺嶌傝傑偟偨丅
傛偐偭偨傜丆巊偭偰傒偰偔偩偝偄丅
僔乕僩偵偼曐岇偐偗偰偁傝傑偡丅
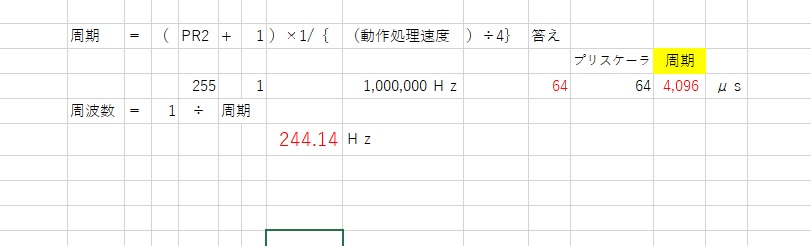
夝彍偼丆侾俀俁係丂偑埫徹斣崋偱偡丅
PR2偑俀俆俇埲忋偵側傞偲僄儔乕偵側傞傛偆偵
偟偰偁傝傑偡丅
http://mabo52.sakura.ne.jp/files/PWM-calc.xlsx
mabo 2019/06/27(Thu) 10:56 No.1728
Re: 媈帡掞峈乕侾
mabo偝傫偙傫偵偪偼丅
崱擔偼巇帠偱偡丅
亜偙偺曈傕傛偔暘偐傜側偄偲偙傠側偺偱偡偑丆
no1728偵偁傞__delay_ms(1);
偙傟偑丄僒儞僾儕儞僌娫妘偱偡丅
__delay_ms(1)偱僒儞僾儕儞僌傪偲傝偮偮丄up偲down偵傕懳墳偟偰偄傑偡偺偱丄
僥僗僞乕偺摦偒偑窖敖偱傢側偄偲巚偄傑偟偨丅
僒儞僾儕儞僌夞悢傪摉弶4偐傜憹傗偟偨棟桼偼丄揹埑傪廍偄偒傟側偄姶偠偱丄揹埑偺暆偑嫹偐偭偨偐傜偱偡丅暯嬒側偺偱丄偦偆側傞偲巚偄傑偟偨丅
屻丄僄僋僙儖偼丄婣戭屻偵
尒偝偣偰捀偒傑偡丅
崱擔偼巇帠偱偡丅
亜偙偺曈傕傛偔暘偐傜側偄偲偙傠側偺偱偡偑丆
no1728偵偁傞__delay_ms(1);
偙傟偑丄僒儞僾儕儞僌娫妘偱偡丅
__delay_ms(1)偱僒儞僾儕儞僌傪偲傝偮偮丄up偲down偵傕懳墳偟偰偄傑偡偺偱丄
僥僗僞乕偺摦偒偑窖敖偱傢側偄偲巚偄傑偟偨丅
僒儞僾儕儞僌夞悢傪摉弶4偐傜憹傗偟偨棟桼偼丄揹埑傪廍偄偒傟側偄姶偠偱丄揹埑偺暆偑嫹偐偭偨偐傜偱偡丅暯嬒側偺偱丄偦偆側傞偲巚偄傑偟偨丅
屻丄僄僋僙儖偼丄婣戭屻偵
尒偝偣偰捀偒傑偡丅
TR 2019/06/27(Thu) 11:35 No.1729 Re: 媈帡掞峈乕侾
mabo偝傫偙傫偵偪偼丅
僒儞僾儕儞僌偼偲傜側偄偲懯栚偲偄偆榖偱偟偨丅
棟桼偼
PWM婎杮廃攇悢偵傛傝丄怣崋偑憲傜傟偰棃傞偐傜偩偦偆偱偡丅
no1728偵偁傞__delay_ms(1);
偙傟偑丄僒儞僾儕儞僌娫妘偱偡丅
__delay_ms(1)偱僒儞僾儕儞僌傪
崱偼丄儅僢僴偺PWM婎杮廃攇悢傪250僿儖僣偐傜幚尡偡傞偮傕傝側偺偱250us偵偟偰偄傑偡丅
柍榑丄幚尡側偺偱僗僞乕僩偼儅僢僴偺婎杮廃攇悢傪100僿儖僣偐傜條巕傪尒傑偡丅
僒儞僾儕儞僌偼偲傜側偄偲懯栚偲偄偆榖偱偟偨丅
棟桼偼
PWM婎杮廃攇悢偵傛傝丄怣崋偑憲傜傟偰棃傞偐傜偩偦偆偱偡丅
no1728偵偁傞__delay_ms(1);
偙傟偑丄僒儞僾儕儞僌娫妘偱偡丅
__delay_ms(1)偱僒儞僾儕儞僌傪
崱偼丄儅僢僴偺PWM婎杮廃攇悢傪250僿儖僣偐傜幚尡偡傞偮傕傝側偺偱250us偵偟偰偄傑偡丅
柍榑丄幚尡側偺偱僗僞乕僩偼儅僢僴偺婎杮廃攇悢傪100僿儖僣偐傜條巕傪尒傑偡丅
TR 2019/06/27(Thu) 12:57 No.1730 Re: 媈帡掞峈乕侾
mabo偝傫偙傫偵偪偼丅
>撉傫偩寢壥傪夁嫀偺堦偮偲擖傟懼偊偰攝楍偵曐懚偡傞丅
no1671偼
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // 傾僫儘僌抣偺曄姺娭悢屇傃弌偟偲攝楍偵傛傝AD曄姺抣傪暯弨壔
for (char i = 0; i < 32; i++)target += adc[i];
target = target >> 8;
if (target > AD5220_val) {
AD5220_up();
} else if (target < AD5220_val) {
AD5220_down(); //U/Ddown娭悢屇傃弌偟
}
}
}
偱偡傛丅
偙偺応崌丄while偺拞偱2廤栚偼丄攝楍傗俙俢抣偼丄慡偰弶婜壔偝傟傑偡傛丅
偱mabo偺壓婰僾儘僌儔儉偼僄儔乕傪婲偙偟傑偟偨丅
偡傒傑偣傫偑丄榖偺嬝偼慺惏傜偟偄偺偱丄惉岟偟偨傜丄慡偰嫵偊偰壓偝偄丅
丂丂婰
while (1)乷
丂if(num==32){num=0;}
丂adc[num] = adconv();
丂num++;
}
>撉傫偩寢壥傪夁嫀偺堦偮偲擖傟懼偊偰攝楍偵曐懚偡傞丅
no1671偼
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // 傾僫儘僌抣偺曄姺娭悢屇傃弌偟偲攝楍偵傛傝AD曄姺抣傪暯弨壔
for (char i = 0; i < 32; i++)target += adc[i];
target = target >> 8;
if (target > AD5220_val) {
AD5220_up();
} else if (target < AD5220_val) {
AD5220_down(); //U/Ddown娭悢屇傃弌偟
}
}
}
偱偡傛丅
偙偺応崌丄while偺拞偱2廤栚偼丄攝楍傗俙俢抣偼丄慡偰弶婜壔偝傟傑偡傛丅
偱mabo偺壓婰僾儘僌儔儉偼僄儔乕傪婲偙偟傑偟偨丅
偡傒傑偣傫偑丄榖偺嬝偼慺惏傜偟偄偺偱丄惉岟偟偨傜丄慡偰嫵偊偰壓偝偄丅
丂丂婰
while (1)乷
丂if(num==32){num=0;}
丂adc[num] = adconv();
丂num++;
}
TR 2019/06/27(Thu) 15:14 No.1731 Re: 媈帡掞峈乕侾
TR偝傫傊
> PIC弶怱幰偱偡丅
>
> 僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
> 幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
> 幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
> 偍婅偄偟傑偡丅
朸僒僀僩偱偙偺幙栤傪尒偰丄巹偼壓婰偺夞摎傪偟傑偟偨丅
> PIC偑壗僋儘僢僋偱摦嶌偟偰偄傞偺偐傪
> #define _XTAL_FREQ 32000000
> 偺傛偆偵愝掕偟偰丄僐儞僷僀儔偼偦偺廃攇悢偐傜丄delay偺憡摉偡傞帪娫暘丄壗傕偟側偄柦椷傪嶼弌偟傑偡丅
>
> 仸幚嵺偵摦偔懍搙偼CONFIG摍偱愝掕偟偨懍搙偱偡丅偦偺懍搙偲_XTAL_FREQ偺抣偑堘偭偰偄傞偲偍偐偟偔側傝傑偡丅戝掞偺応崌丄仜攞乮1/仜攞乯帪娫偑偍偐偟偔側傝傑偡丅
>
> 傕偆堦偮偼丄delay柦椷傪幚峴拞偵妱傝崬傒偑擖傞偲丄妱傝崬傒偺帪娫暘丄抶偔側傞偙偲偵側傝傑偡丅
> 傑偨丄撪憼僆僔儗乕僞偼惈擻偑埆偄偺偱丄帪娫傪嶼弌偡傞傛偆側梡搑偩偲寢峔偢傟偰偄偔偲巚偄傑偡丅
> 傑偀丄偙偺偁偨傝偼丄戝掞丄偪傚偭偲偺帪娫偺偢傟偱偡偐傜丄暘扨埵偱傒側偄偲傢偐傜側偄偱偟傚偆丅
偦偟偰偦偺屻丄偙偙傪朘栤偟偰丄壓婰偺彂偒崬傒傪尒偰丄幙栤幰偑TR偝傫偩偭偨偺傪偡偖偵婥偯偒傑偟偨丅
> 僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
> 幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
> 幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
> 偍婅偄偟傑偡丅
摉慠丄偙偙偱偺帠偱偟傚偆偐傜丄忋偺曽偐傜TR偝傫偺彂偒崬傒乮僾儘僌儔儉傪僠僃僢僋偟偰偄偒傑偟偨乯
仸傑偢丄幚廃攇悢偲#define _XTAL_FREQ XXXXX偑偍偐偟偄偺偩傠偆偲巚偭偨傢偗偱偡丅
偱丄僨乕僞僔乕僩傪傒偰丄偳偺晹暘傪楳傟偽廃攇悢偑寛傑傞偺偐傪僠僃僢僋偟偰丄僾儘僌儔儉偲1偮偢偮撍偒崌傢偣傑偟偨丅
偦偟偰丄偍偐偟偄晹暘傪敪尒偟偨偺偱丄壓婰偺夞摎傪捛壛偟傑偟偨丅
> OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
>
> 偙傟偑偍偐偟偄偱偡
晛捠丄偙傟傪尒傟偽丄帺暘偺婰嵹偟偰偄傞晹暘傪僠僃僢僋偡傞偱偟傚偆丠
偙傫側偵柧妋偵応強傪帵偟偰偄傞傫偱偡傛丠
偦傟偵懳偟偰丄嵟屻偺僐儊儞僩偵
> 傕偆彮偟弶怱幰偵傕挌擩側愢柧傪偍婅偄偟傑偡丅
> 挌擩側愢柧偵傛傝僗僩儗僗偑彮側偔側傝傑偡丅
偲曉怣偟偰丄偦偺幙栤偼廔傢傝傑偟偨丅
堄枴偑敾傜側偗傟偽丄峏偵暦偗偽偄偄帠偱偡丅
崱傑偱曉怣偟偰偄偨戝掞偺恖偼娫堘偊偨売強傪嫵偊偰偁偘傟偽帺暘偱婥偯偄偰捈偟偰偄傑偟偨丅
偪傚偭偲TR偝傫丄娒偊夁偓偱偡傛丅
偄偮傑偱傕弶怱幰偲偐尵偭偰偄傑偡偗偳丄PIC偱尵偊偽丄TR偝傫偑巒傔偨偺偱巹傕巒傔偨傛偆偵婰壇偟偰偄傑偡丅
乮偦傟帺懱偼婰壇偑掕偐偱偼偁傝傑偣傫偗偳丄弶傔偰PIC傪廐寧偱拲暥偟偨偺偑2015.11.3偱偡丅乯
夛幮偱傕偨傑偵儅僀僐儞傪巊偭偰偄傑偡偗偳丄慡偰AVR偱丄PIC偼僪僢僩儅僩儕僋僗偱惓寧偺垾嶢偺傗偮傪傗偭偰埲棃丄懡暘丄巊偭偰偄傑偣傫丅
榖偑偦傟傑偟偨偗偳丄僾儘僌儔儉偼帺暘偱愑擟傪傕偭偰夵曄偡傋偒偱偡丅
TR偝傫偑傾僢僾偟偨僾儘僌儔儉傪巹偑僠僃僢僋偡傞愑擟偑偁傞偲峫偊偰偄傞偺偱偟傚偆偐丠
傑偨丄挌擩偵嫵偊傞媊柋偑偁傞偲峫偊偰偄傞偺偱偟傚偆偐丠
堦懱壗條偺偮傕傝側偺偱偟傚偆丠丠
> mabo偝傫丄偄偮傕挌擩側愢柧偵姶幱偟傑偡丅
> mabo偝傫偲偺僐儈儏僯働乕僔儑儞偵偼僗僩儗僗偑偁傝傑偣傫両両両両
> 婥偑崌偄傑偡偹両両両
偙傟傪傒偰丄壓楎側恖偩偲丄偲姶偠傑偟偨丅
傑傞偱巹偑挌擩側愢柧傪偟偰偄側偄丄偲偄偆彂偒傇傝偱偡傛偹丅
尦乆丄巹偑偙偺椶偺怱攝偑柍偄丄Arduino傪慐傔偰偄偨偺傪朰傟偰偄傞偺偱偟傚偆偐丠
CONFIG傗儗僕僗僞偺巊偄曽傕寛偟偰弶傔偰偱偼偁傝傑偣傫丅
僨乕僞僔乕僩傪傒傞偺偼PIC偱偼昁恵偱偡丅
偙傟傑偱婔搙偲側偔愢柧偟傑偟偨偟丄廳梫惈傕愢偒傑偟偨丅
栜榑丄挷傋偰抣傪嫵偊傞偺偼娙扨側帠偱偡丅偗傟偳傕丄TR偝傫帺恎偑僨乕僞僔乕僩傪尒偰愝掕偡傞帠偑廳梫側傫偱偡丅
仸偝傕側偗傟偽丄怣棅偱偒傞傕偺傪擖庤偟偰丄寛偟偰曄偊側偄帠丄偲偄偆庯巪傪榖偟傑偟偨丅
偦傟傪帺暘偱弌棃側偄偺側傜傕偆傗傔偨曽偑椙偄偱偡丅
> 丂丂丂婰
> OSCCON偵偮偄偰
> 摉丂弶丗OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
>
> 曄峏屻丗OSCCON = 0b01110010; //僋儘僢僋廃攇悢傪16MHz偵愝掕
偱丄慡偔捈偭偰偄傑偣傫偹丅
TR偝傫偼丄偁側偨偑巹偺僾儘僌儔儉傪壗搙夵埆偟偰丄巹偺僗僩儗僗偵側偭偨偐偍敾傝偱偟傚偆偐丠
偦偺搙偵埆偄売強傪巜揈偡傞偺偵丄壗傕僗僩儗僗偑柍偄偲巚偭偰偄傞偺偱偟傚偆偐丠
巜揈偟偰傕捈偟偰傕傜偊偢丄傑偨巜揈偡傞偺傕僗僩儗僗側傫偱偡傛丅
僾儘僌儔儉偼婎杮揑偵丄懠恖偵捈偟偰傕傜偆傕偺偱偼柍偄偺偱偡丅帺暘偱嶌傝忋偘傞傕偺偩偲巚偄傑偡丅
PIC偑弶傔偰側傜巹傕偦偺抣傪嫵偊傑偡丅
巹偑儅僀僐儞乮AVR乯傪弶傔偰偐傜栺6擭庛偱偡丅PIC偵庤傪弌偟偰偐傜偼3擭敿丅
偱傕偦偺3擭敿偼TR偝傫偲傕廳側偭偰偄傑偡傛偹丠
偄偮傑偱弶怱幰偲偐丄娒偭偨傟偰偄傞偮傕傝側偺偱偟傚偆偐丠
巹偼偦偺6擭庛偺娫偵丄儅僀僐儞偺帠傪懠恖偵暦偄偨帠偼柍偄???偲巚偄傑偡丅乮婰壇偺忋偱偼乯
栜榑丄敾傜側偄帠偩傜偗偱偟偨偐傜丄僨乕僞僔乕僩傗WEB忋偺栶偵棫偪偦偆側傕偺傪挷傋傑偔傝傑偟偨丅
3擭敿偼丄愱栧妛峑偱傕懖嬈偡傞傛偆側擭寧偱偡丅堦懱壗擭偱弶怱幰傪懖嬈偡傞偮傕傝偱偡偐丠
偦偟偰丄弶怱幰傪懖嬈偡傞婥偼偁傞偺偱偟傚偆偐丠
仸巹偼乽弶怱幰乿偲尵偊傞偺偼敿擭掱搙偩偲巚偭偰偄傑偡丅乽弶怱幰乿偲乽弶媺乿偼堘偄傑偡丅
丂偙偙偱PIC傪巒傔偨摉弶丄AVR偺曽偼2擭敿掱搙偱偟偨偗偳丄乽弶媺偺廔傢傝偁偨傝乿偩偲帺暘偱擣幆偟偰偄傑偟偨丅
傑偨傑偨丄榖偑扙慄偟傑偟偨丅
巹偑嶌偭偨僾儘僌儔儉傪夵埆偝傟傞偺傕丄偦傟偑堦場偱側偵偐偍偐偟側帠偵側偭偰偄偔偺傕巹偵偲偭偰僗僩儗僗偱偡丅
側偺偱丄
崱屻堦愗丄巹偑嶌偭偨僾儘僌儔儉偼夵曄亖巊傢側偄偱壓偝偄丅
> PIC弶怱幰偱偡丅
>
> 僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
> 幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
> 幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
> 偍婅偄偟傑偡丅
朸僒僀僩偱偙偺幙栤傪尒偰丄巹偼壓婰偺夞摎傪偟傑偟偨丅
> PIC偑壗僋儘僢僋偱摦嶌偟偰偄傞偺偐傪
> #define _XTAL_FREQ 32000000
> 偺傛偆偵愝掕偟偰丄僐儞僷僀儔偼偦偺廃攇悢偐傜丄delay偺憡摉偡傞帪娫暘丄壗傕偟側偄柦椷傪嶼弌偟傑偡丅
>
> 仸幚嵺偵摦偔懍搙偼CONFIG摍偱愝掕偟偨懍搙偱偡丅偦偺懍搙偲_XTAL_FREQ偺抣偑堘偭偰偄傞偲偍偐偟偔側傝傑偡丅戝掞偺応崌丄仜攞乮1/仜攞乯帪娫偑偍偐偟偔側傝傑偡丅
>
> 傕偆堦偮偼丄delay柦椷傪幚峴拞偵妱傝崬傒偑擖傞偲丄妱傝崬傒偺帪娫暘丄抶偔側傞偙偲偵側傝傑偡丅
> 傑偨丄撪憼僆僔儗乕僞偼惈擻偑埆偄偺偱丄帪娫傪嶼弌偡傞傛偆側梡搑偩偲寢峔偢傟偰偄偔偲巚偄傑偡丅
> 傑偀丄偙偺偁偨傝偼丄戝掞丄偪傚偭偲偺帪娫偺偢傟偱偡偐傜丄暘扨埵偱傒側偄偲傢偐傜側偄偱偟傚偆丅
偦偟偰偦偺屻丄偙偙傪朘栤偟偰丄壓婰偺彂偒崬傒傪尒偰丄幙栤幰偑TR偝傫偩偭偨偺傪偡偖偵婥偯偒傑偟偨丅
> 僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
> 幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
> 幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
> 偍婅偄偟傑偡丅
摉慠丄偙偙偱偺帠偱偟傚偆偐傜丄忋偺曽偐傜TR偝傫偺彂偒崬傒乮僾儘僌儔儉傪僠僃僢僋偟偰偄偒傑偟偨乯
仸傑偢丄幚廃攇悢偲#define _XTAL_FREQ XXXXX偑偍偐偟偄偺偩傠偆偲巚偭偨傢偗偱偡丅
偱丄僨乕僞僔乕僩傪傒偰丄偳偺晹暘傪楳傟偽廃攇悢偑寛傑傞偺偐傪僠僃僢僋偟偰丄僾儘僌儔儉偲1偮偢偮撍偒崌傢偣傑偟偨丅
偦偟偰丄偍偐偟偄晹暘傪敪尒偟偨偺偱丄壓婰偺夞摎傪捛壛偟傑偟偨丅
> OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
>
> 偙傟偑偍偐偟偄偱偡
晛捠丄偙傟傪尒傟偽丄帺暘偺婰嵹偟偰偄傞晹暘傪僠僃僢僋偡傞偱偟傚偆丠
偙傫側偵柧妋偵応強傪帵偟偰偄傞傫偱偡傛丠
偦傟偵懳偟偰丄嵟屻偺僐儊儞僩偵
> 傕偆彮偟弶怱幰偵傕挌擩側愢柧傪偍婅偄偟傑偡丅
> 挌擩側愢柧偵傛傝僗僩儗僗偑彮側偔側傝傑偡丅
偲曉怣偟偰丄偦偺幙栤偼廔傢傝傑偟偨丅
堄枴偑敾傜側偗傟偽丄峏偵暦偗偽偄偄帠偱偡丅
崱傑偱曉怣偟偰偄偨戝掞偺恖偼娫堘偊偨売強傪嫵偊偰偁偘傟偽帺暘偱婥偯偄偰捈偟偰偄傑偟偨丅
偪傚偭偲TR偝傫丄娒偊夁偓偱偡傛丅
偄偮傑偱傕弶怱幰偲偐尵偭偰偄傑偡偗偳丄PIC偱尵偊偽丄TR偝傫偑巒傔偨偺偱巹傕巒傔偨傛偆偵婰壇偟偰偄傑偡丅
乮偦傟帺懱偼婰壇偑掕偐偱偼偁傝傑偣傫偗偳丄弶傔偰PIC傪廐寧偱拲暥偟偨偺偑2015.11.3偱偡丅乯
夛幮偱傕偨傑偵儅僀僐儞傪巊偭偰偄傑偡偗偳丄慡偰AVR偱丄PIC偼僪僢僩儅僩儕僋僗偱惓寧偺垾嶢偺傗偮傪傗偭偰埲棃丄懡暘丄巊偭偰偄傑偣傫丅
榖偑偦傟傑偟偨偗偳丄僾儘僌儔儉偼帺暘偱愑擟傪傕偭偰夵曄偡傋偒偱偡丅
TR偝傫偑傾僢僾偟偨僾儘僌儔儉傪巹偑僠僃僢僋偡傞愑擟偑偁傞偲峫偊偰偄傞偺偱偟傚偆偐丠
傑偨丄挌擩偵嫵偊傞媊柋偑偁傞偲峫偊偰偄傞偺偱偟傚偆偐丠
堦懱壗條偺偮傕傝側偺偱偟傚偆丠丠
> mabo偝傫丄偄偮傕挌擩側愢柧偵姶幱偟傑偡丅
> mabo偝傫偲偺僐儈儏僯働乕僔儑儞偵偼僗僩儗僗偑偁傝傑偣傫両両両両
> 婥偑崌偄傑偡偹両両両
偙傟傪傒偰丄壓楎側恖偩偲丄偲姶偠傑偟偨丅
傑傞偱巹偑挌擩側愢柧傪偟偰偄側偄丄偲偄偆彂偒傇傝偱偡傛偹丅
尦乆丄巹偑偙偺椶偺怱攝偑柍偄丄Arduino傪慐傔偰偄偨偺傪朰傟偰偄傞偺偱偟傚偆偐丠
CONFIG傗儗僕僗僞偺巊偄曽傕寛偟偰弶傔偰偱偼偁傝傑偣傫丅
僨乕僞僔乕僩傪傒傞偺偼PIC偱偼昁恵偱偡丅
偙傟傑偱婔搙偲側偔愢柧偟傑偟偨偟丄廳梫惈傕愢偒傑偟偨丅
栜榑丄挷傋偰抣傪嫵偊傞偺偼娙扨側帠偱偡丅偗傟偳傕丄TR偝傫帺恎偑僨乕僞僔乕僩傪尒偰愝掕偡傞帠偑廳梫側傫偱偡丅
仸偝傕側偗傟偽丄怣棅偱偒傞傕偺傪擖庤偟偰丄寛偟偰曄偊側偄帠丄偲偄偆庯巪傪榖偟傑偟偨丅
偦傟傪帺暘偱弌棃側偄偺側傜傕偆傗傔偨曽偑椙偄偱偡丅
> 丂丂丂婰
> OSCCON偵偮偄偰
> 摉丂弶丗OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
>
> 曄峏屻丗OSCCON = 0b01110010; //僋儘僢僋廃攇悢傪16MHz偵愝掕
偱丄慡偔捈偭偰偄傑偣傫偹丅
TR偝傫偼丄偁側偨偑巹偺僾儘僌儔儉傪壗搙夵埆偟偰丄巹偺僗僩儗僗偵側偭偨偐偍敾傝偱偟傚偆偐丠
偦偺搙偵埆偄売強傪巜揈偡傞偺偵丄壗傕僗僩儗僗偑柍偄偲巚偭偰偄傞偺偱偟傚偆偐丠
巜揈偟偰傕捈偟偰傕傜偊偢丄傑偨巜揈偡傞偺傕僗僩儗僗側傫偱偡傛丅
僾儘僌儔儉偼婎杮揑偵丄懠恖偵捈偟偰傕傜偆傕偺偱偼柍偄偺偱偡丅帺暘偱嶌傝忋偘傞傕偺偩偲巚偄傑偡丅
PIC偑弶傔偰側傜巹傕偦偺抣傪嫵偊傑偡丅
巹偑儅僀僐儞乮AVR乯傪弶傔偰偐傜栺6擭庛偱偡丅PIC偵庤傪弌偟偰偐傜偼3擭敿丅
偱傕偦偺3擭敿偼TR偝傫偲傕廳側偭偰偄傑偡傛偹丠
偄偮傑偱弶怱幰偲偐丄娒偭偨傟偰偄傞偮傕傝側偺偱偟傚偆偐丠
巹偼偦偺6擭庛偺娫偵丄儅僀僐儞偺帠傪懠恖偵暦偄偨帠偼柍偄???偲巚偄傑偡丅乮婰壇偺忋偱偼乯
栜榑丄敾傜側偄帠偩傜偗偱偟偨偐傜丄僨乕僞僔乕僩傗WEB忋偺栶偵棫偪偦偆側傕偺傪挷傋傑偔傝傑偟偨丅
3擭敿偼丄愱栧妛峑偱傕懖嬈偡傞傛偆側擭寧偱偡丅堦懱壗擭偱弶怱幰傪懖嬈偡傞偮傕傝偱偡偐丠
偦偟偰丄弶怱幰傪懖嬈偡傞婥偼偁傞偺偱偟傚偆偐丠
仸巹偼乽弶怱幰乿偲尵偊傞偺偼敿擭掱搙偩偲巚偭偰偄傑偡丅乽弶怱幰乿偲乽弶媺乿偼堘偄傑偡丅
丂偙偙偱PIC傪巒傔偨摉弶丄AVR偺曽偼2擭敿掱搙偱偟偨偗偳丄乽弶媺偺廔傢傝偁偨傝乿偩偲帺暘偱擣幆偟偰偄傑偟偨丅
傑偨傑偨丄榖偑扙慄偟傑偟偨丅
巹偑嶌偭偨僾儘僌儔儉傪夵埆偝傟傞偺傕丄偦傟偑堦場偱側偵偐偍偐偟側帠偵側偭偰偄偔偺傕巹偵偲偭偰僗僩儗僗偱偡丅
側偺偱丄
崱屻堦愗丄巹偑嶌偭偨僾儘僌儔儉偼夵曄亖巊傢側偄偱壓偝偄丅
栆媿儘僢僋 2019/06/27(Thu) 17:45 No.1732 Re: 媈帡掞峈乕侾
栆媿儘僢僋偝傫傊
尵偄崌偄傪偡傞婥偼偁傝傑偣傫丅
栆媿儘僢僋偝傫偵怓乆偲嫵偊偰捀偄偰姶幱偟偰偄傑偡丅
偱傕丄暘偐傜側偄偙偲偼暘偐傜側偄傫偱偡傛丅
崱夞偛嫵帵捀偄偨僾儘僌儔儉偼丄偮偄嵟嬤傑偱偆傑偔摦嶌偟側偐偭偨偺偱偡丅
愜妏丄嫵偊偰捀偄偨僾儘僌儔儉側偺偱丄撪梕傪棟夝偟丄摦嶌偟偨偄偲巚偄傑偟偨丅
寛偟偰丄夵埆偡傞偮傕傝偼偁傝傑偣傫丅
忋庤偔摦嶌偡傞僾儘僌儔儉偵偟偨偄偲巚偭偰偄傑偡丅
埆偔偼偲傜偊側偄偱壓偝偄丅
尵偄崌偄傪偡傞婥偼偁傝傑偣傫丅
栆媿儘僢僋偝傫偵怓乆偲嫵偊偰捀偄偰姶幱偟偰偄傑偡丅
偱傕丄暘偐傜側偄偙偲偼暘偐傜側偄傫偱偡傛丅
崱夞偛嫵帵捀偄偨僾儘僌儔儉偼丄偮偄嵟嬤傑偱偆傑偔摦嶌偟側偐偭偨偺偱偡丅
愜妏丄嫵偊偰捀偄偨僾儘僌儔儉側偺偱丄撪梕傪棟夝偟丄摦嶌偟偨偄偲巚偄傑偟偨丅
寛偟偰丄夵埆偡傞偮傕傝偼偁傝傑偣傫丅
忋庤偔摦嶌偡傞僾儘僌儔儉偵偟偨偄偲巚偭偰偄傑偡丅
埆偔偼偲傜偊側偄偱壓偝偄丅
TR 2019/06/27(Thu) 18:20 No.1733 Re: 媈帡掞峈乕侾
mabo偝傫傊
棟桼偼偳偆偱偁傟丄榚偱尒偰偄偰婥暘傪奞偝傟偨偲巚偄傑偡丅
帺暘偼丄傕偆偙偺応強偵棃傑偣傫丅
偲偄偆偺傕丄扤偲傕拠椙偔偟偨偄偺偱偡偑丄
懡暘丄偆傑偔偄偐側偄偲巚偆偐傜偱偡丅
偙傟傑偱丄怓乆偲嫵偊偰偄偨偩偒姶幱怽偟忋偘傑偡丅
杮摉偵巆擮偱偡偑丄幐楃偟傑偡丅
棟桼偼偳偆偱偁傟丄榚偱尒偰偄偰婥暘傪奞偝傟偨偲巚偄傑偡丅
帺暘偼丄傕偆偙偺応強偵棃傑偣傫丅
偲偄偆偺傕丄扤偲傕拠椙偔偟偨偄偺偱偡偑丄
懡暘丄偆傑偔偄偐側偄偲巚偆偐傜偱偡丅
偙傟傑偱丄怓乆偲嫵偊偰偄偨偩偒姶幱怽偟忋偘傑偡丅
杮摉偵巆擮偱偡偑丄幐楃偟傑偡丅
TR 2019/06/27(Thu) 18:53 No.1734 Re: 媈帡掞峈乕侾
 TR偝傫傊
TR偝傫傊> 栆媿儘僢僋偝傫傊
>
> 尵偄崌偄傪偡傞婥偼偁傝傑偣傫丅
巹偼尵偄憟偄傕墋偄傑偣傫傛丅偦傟偱偄偄曽岦偵岦偔側傜丅
偱丄巹偑
> OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
>
> 偙傟偑偍偐偟偄偱偡
偲彂偄偨屻丄偪傖傫偲僨乕僞僔乕僩傪尒偰妋擣偟偨偺偱偟傚偆偐丠
> 偱傕丄暘偐傜側偄偙偲偼暘偐傜側偄傫偱偡傛丅
偲尵偄栿傪偟偰偄傑偡偗偳丄偦偺儗僗傪傒偰乽OSCCON偺抣偵尨場偑偁傞偩傠偆乿偲敾傜側偄敜偼側偄偱偡傛偹丠
偱丄揧晅恾偺OSCCON偺儁乕僕傪傒偰丄偦傟偱傕敾傜側偐偭偨偺偱偡偐丠
乽1111 =16 MHz HF乿
偲偐偄偰偁傝傑偡傛偹丠
偙傟傪尒偰丄
> 曄峏屻丗OSCCON = 0b01110010; //僋儘僢僋廃攇悢傪16MHz偵愝掕
偲偟偨棟桼偼愢柧偱偒傑偡偐丠
巹偼丄壗傕偟偰偄側偄乽嫵偊偰孨乿偩偲敾抐偟傑偟偨丅
壗傕妋擣偣偢偵丄搘椡傕偣偢偵丄摎偊偩偗傪暦偄偨偲偄偆敾抐偱偡丅
乽偱傕丄暘偐傜側偄偙偲偼暘偐傜側偄傫偱偡傛丅乿側傫偰偄偆偺偼偦偺堊偺搘椡傪偟偨恖偑尵偆尵梩偱偡丅
尒嬯偟偄尵偄栿偼巭傔偰傕傜偄偨偄偱偡丅
偦偟偰丄杮摉偵尒偰乮搘椡偟偰乯傢偐傜側偐偭偨偺側傜偼偭偒傝偲尵偭偰偔偩偝偄丅
巹偼TR偝傫偵姰惉偟偨僾儘僌儔儉傪嫵偊傞偺偑栚揑偱偼偁傝傑偣傫丅
TR偝傫偑儅僀僐儞偑巊偊傞傛偆偵丄僾儘僌儔儉偑彂偗傞傛偆偵側傞偨傔偵嫤椡偟偰偒偨偮傕傝偱偡傛丅
<捛婰偟傑偡>
幙栤庡偑TR偝傫偲婥晅偄偰丄巹偑偍偐偟偄売強偼偳偙偼挷傋偰偄偭偰丄偍偐偟偄売強傪敪尒偟偰丄偦傟傪曬崘偟偨栿偱偡偗偳丄
偁側偨偼丄巹偑挷傋傞帠傕丄偍偐偟偄売強傪敪尒偡傞帠傕丄偝傕摉慠偲偄偆懺搙偱丄偦偺忋丄
楃偺堦偮傕尵傢偢偵丄乽壗屘挌擩偵愢柧偟側偄傫偩乿偲偄偆椶偺帠傪尵偭偨偺偱偡傛両
巹偵偼偦偺懜戝側懺搙偺棟桼偑敾傝傑偣傫丅
偦偙傑偱偡傞媊柋偼晧偭偰偄傑偣傫偐傜丅
偱傕丄傑偩偦傟偩偗側傜棳偟偰偄傑偟偨丅
乮偦偆偄偭偨僗僩儗僗偼巹偵傕偙傟傑偱偵傕婔搙傕偁傝傑偡傛乯
偱丄崱挬偺搳峞乮No.1727乯偱偡丅
> 慺恖偵偼丄挌擩偵愢柧偟偰偔傟側偄偲壗傪尵偭偰偄傞偺偐傛偔暘偐傝傑偣傫両両
> mabo偝傫丄偄偮傕挌擩側愢柧偵姶幱偟傑偡丅
> mabo偝傫偲偺僐儈儏僯働乕僔儑儞偵偼僗僩儗僗偑偁傝傑偣傫両両両両
> 婥偑崌偄傑偡偹両両両
偙傟偼偳偆尒偰傕丄巹傊偺暥嬪偑娷傑傟偰偄傑偡傛偹丅
捈愙尵傢側偄丄壗偲傕丄偄傗傜偟偄昞尰偩偲巚偄傑偡丅
偦偟偰丄嬌傔晅偗偼偦偺屻偺
> 丂丂丂婰
> OSCCON偵偮偄偰
> 摉丂弶丗OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
>
> 曄峏屻丗OSCCON = 0b01110010; //僋儘僢僋廃攇悢傪16MHz偵愝掕
偙傟偩偗暥嬪傪尵偄側偑傜帺暘偱偼壗傕偟偰偄側偄!!!
偲丄傑偀丄偙傫側姶偠偱巹偼懆偊偨偺偱偡偑丄偦傟偵偮偄偰偼壗偐斀榑偼偁傝傑偡偐丠
乽埆偔偼偲傜偊側偄偱壓偝偄丅乿偲尵偭偰偄傑偡偗偳丄懘傟偱偼偳偆懆偊傟偽偄偄偺偱偟傚偆丠
乽棟桼偼偳偆偱偁傟丄乿偲偼丠傑傞偱TR偝傫偺曽偵偼尨場偑柍偄傛偆側尵偄曽偱偡偗偳丠
栆媿儘僢僋 2019/06/27(Thu) 22:58 No.1735 Re: 媈帡掞峈乕侾
 MABO偝傫丄偙傫側帠偵側偭偰偟傑偄丄怽偟栿偁傝傑偣傫丅
MABO偝傫丄偙傫側帠偵側偭偰偟傑偄丄怽偟栿偁傝傑偣傫丅巹偺愙偟曽偑埆偐偭偨偺偱偟傚偆偐丠
尦乆丄僶僀僞儕僥傿乕偑偁偭偰丄偳傫偳傫撍偒恑傓僀儊乕僕偑偁傞恖偱偟偨丅
偱傕崱偲偼堘偭偰丄彑庤偵偳傫偳傫恑傫偱偄偔僀儊乕僕偱偟偨丅栚偑棧偣側偄偲偄偆偐
偱傕嵟嬤偼丄側傫偲側偔婑惗偟偰偄傞傛偆側僀儊乕僕傪帩偭偰偄傑偟偨丅
帺暘偺椉懌偱棫偭偰偄側偄傛偆側乧
抶偐傟憗偐傟丄偙偆側偭偨傛偆側婥偑偟傑偡丅
偙偺傑傑偱偼壗傕惉挿偟側偄偺偼栚偵尒偊偰偄傑偟偨偐傜丅
乽巹偺僾儘僌儔儉傪堦愗偮偐偆側乿偲偄偆偺偼丄乽1峴偢偮偪傖傫偲帺暘偱愑擟傪傕偭偰彂偄偰偄偐側偄偲恎偵晅偐側偄乿丄偲偄偆峫偊偐傜棃偰偄傑偡丅
幚偺強丄偦傫側偵搟偭偰偄傞栿偱偼偁傝傑偣傫丅傑偀丄搟偭偰偼偄傑偡偗偳丅
偙偺傑傑嫃側偔側傞偺偱偟傚偆偐偹丠
尨場傪嶌偭偨恎偱偡偗偳丄庘偟偔姶偠傑偡丅
偦傫側帪偵丄AD5220偑棃傑偟偨丅
崱峏偱偡偗偳丄僥僗僩偟傑偟偨偐傜曬崘偟傑偡丅
弶婜壔偺僔乕働儞僗偼堦搙丄堦斣忋傑偱儚僀僷乕傪忋偘偰丄堦斣壓傑偱壓偘傑偡丅
嬶懱揑偵偼丄Arduino偺setup偱丄
for (byte i = 0; i < 70; i++) {
digitalWrite(ud, HIGH);
digitalWrite(clk, LOW);
digitalWrite(clk, HIGH);
}
for (byte i = 0; i < 128; i++) {
digitalWrite(ud, LOW);
digitalWrite(clk, LOW);
digitalWrite(clk, HIGH);
}
偲偟偨傜偙偺屻偼姰摦偟傑偟偨丅乮10夞掱搙妋擣乯
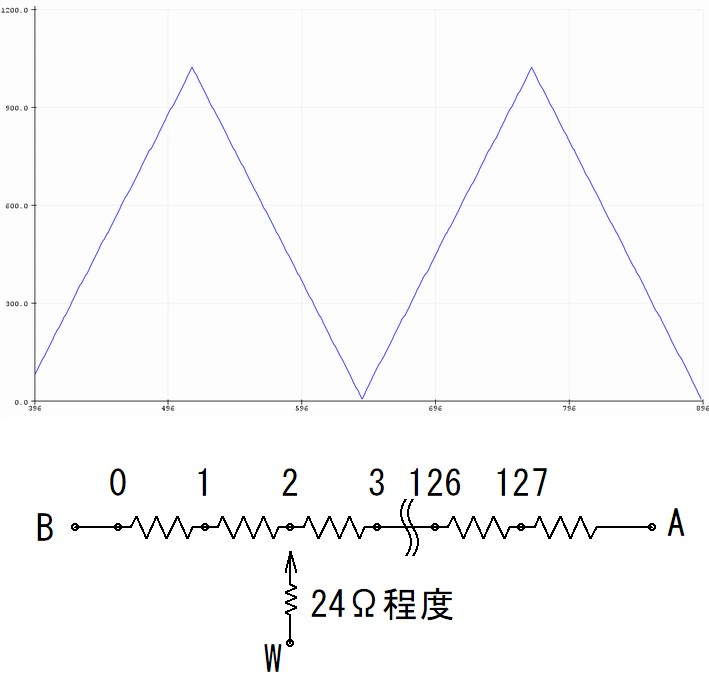
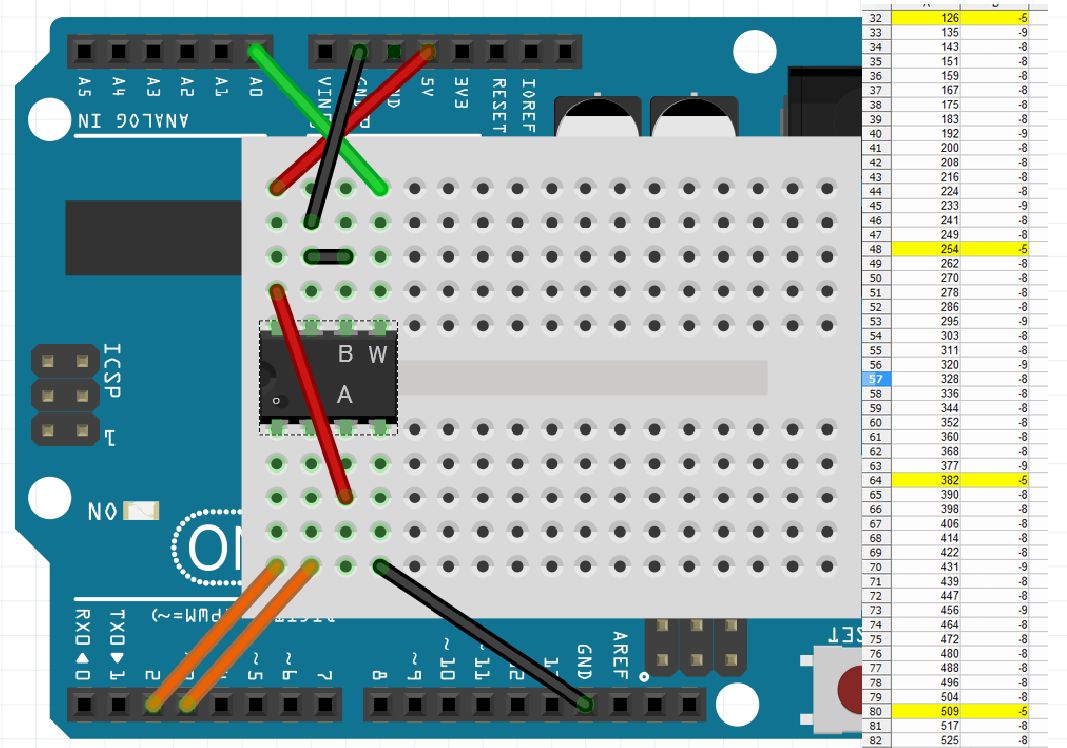
偱儚僀僷乕偼0乣127偱偡丅偦偺娫偼傏偪傏偪鉟楉乮懡彮偺備偑傒偁傝乯偵摦偒傑偡丅揧晅恾
揹埑偼0V(B懁)乣4.96V(A懁)偱偟偨丅壗屘偐丄曅懁偼偪傖傫偲晅偔偺偵媡偼晅偒傑偣傫丅
媡偵宷偖偲0.04V(A懁)乣5.0V乮B懁乯偲側傝傑偡丅乮揧晅恾偼偙偭偪偺愙懕偱偡乯
偮傑傝丄A懁偼掞峈1偮暘丄懚嵼偟偰偄傞傛偆偱偡丅
仺128億僕僔儑儞偱丄儚僀僷乕1偮偱1/128摦偒傑偡丅偦偟偰丄A懁偵偼1儚僀僷乕暘巆傝傑偡丅
儚僀僷乕掞峈偼24兌掱搙丅乮揧晅恾偺0偺埵抲偱偺A-W娫掞峈乯
栆媿儘僢僋 2019/06/28(Fri) 12:44 No.1736 Re: 媈帡掞峈乕侾
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
栆媿儘僢僋偝傫丆徻偟偄幚尡寢壥偺偁傝偑偲偆偛偞偄傑偡丅
亜偮傑傝丄A懁偼掞峈1偮暘丄懚嵼偟偰偄傞傛偆偱偡丅
偙傟偼丆偳偆傫側傫偱偟傚偆偐偹丅
巇條側偺偐丆偦傟偲傕丆儚僀僷乕偺堏摦偵巊偭偰傞敿摫懱偑丆
惢憿帪偵晄嬶崌婲偙偟偨偺偐丆偪傚偭偲丠偱偟傚偆偐丅
幚嵺偵巊梡偡傞偵偼丆埨掕偟偰摦嶌偡傞偨傔偺忦審摍丆偄傠偄傠挷傋傞昁梫偁傝偱偡偹丅
僩儔儞僕僗僞偐僼僅僢僩僇僾儔乕偲廐寧偺埨偄儘乕僞儕乕僄儞僐乕僟乕偲僄儞僐乕僟乕傪巊偭偰丆
帺嶌偺僨僕僞儖億僥儞僔儑儊乕僞乕嶌偭偰傒傛偆偐側丆
側傫偰巚偭偰傑偡丅
栆媿儘僢僋偝傫丆徻偟偄幚尡寢壥偺偁傝偑偲偆偛偞偄傑偡丅
亜偮傑傝丄A懁偼掞峈1偮暘丄懚嵼偟偰偄傞傛偆偱偡丅
偙傟偼丆偳偆傫側傫偱偟傚偆偐偹丅
巇條側偺偐丆偦傟偲傕丆儚僀僷乕偺堏摦偵巊偭偰傞敿摫懱偑丆
惢憿帪偵晄嬶崌婲偙偟偨偺偐丆偪傚偭偲丠偱偟傚偆偐丅
幚嵺偵巊梡偡傞偵偼丆埨掕偟偰摦嶌偡傞偨傔偺忦審摍丆偄傠偄傠挷傋傞昁梫偁傝偱偡偹丅
僩儔儞僕僗僞偐僼僅僢僩僇僾儔乕偲廐寧偺埨偄儘乕僞儕乕僄儞僐乕僟乕偲僄儞僐乕僟乕傪巊偭偰丆
帺嶌偺僨僕僞儖億僥儞僔儑儊乕僞乕嶌偭偰傒傛偆偐側丆
側傫偰巚偭偰傑偡丅
mabo 2019/06/29(Sat) 21:38 No.1737 Re: 媈帡掞峈乕侾
 僨乕僞僔乕僩偵偼偦偺曈偺強偼彂偐傟偰偄側偄傛偆偱偡丅
僨乕僞僔乕僩偵偼偦偺曈偺強偼彂偐傟偰偄側偄傛偆偱偡丅偨偩偟丄P8塃懁偺愢柧拞丄
乽VR偺岞徧掞峈乮R AB 乯偼丄128億僀儞僩偺愙怗揰傪帩偪悹
摦抂巕偵愙懕偝傟偰偄傑偡丅偝傜偵丄B抂巕偺愙怗揰偑偙傟偵捛壛
偝傟傑偡丅乿
偲偁傝傑偡丅偙偺愢柧傗偦偺忋偺恾偼棟夝偱偒傑偣傫偱偟偨偗偳丄抂巕A丄抂巕B偵偼
偪傚偭偲偟偨堘偄偑偁傞傛偆偵偼撉傒庢傟傑偡丅
(偦偺忋偺恾38側傫偰丄Ax抂巕偲Wx抂巕偑宷偑偭偰偄傞偺偱丄慡偔堄枴偑夝傝傑偣傫
側偺偱丄偙偺僨乕僞僔乕僩帺懱丄乽REV.0乿偲側偭偰偄傞傛偆偵丄怣棅惈偼掅偄偱偡丅)
栜榑丄巹偺曬崘偼丄巹偺擖庤偟偨屄懱乮AD5220BNZ10乯1屄傪挷傋偨傕偺偱偡偐傜丄偦傟偱丄
慡偰摉偰偼傑傞偐偼晄柧偱偡丅
仸嵟弶偼丄弶婜壔偱丄堦斣壓傑偱儚僀僷乕傪壓偘偰偐傜丄儖乕僾娭悢偱丄乽1偮偢偮忋傑偱忋偘偰偄偒丄堦斣忋傑偱峴偭偨傜堦斣壓傑偱壓偘傞丄乿
偺孞傝曉偟丄偲偄偆僗働僢僠偱帋偟偰偄傑偟偨丅偙偙偱忋偑偭偰偄偨傛偆側僗働僢僠偱偡丅乮儖乕僾晹偼堦抜枅偵慡偰儌僯僞昞帵乯
偱丄悢夞偺寢壥偲偟偰偼丄慡偰丄弶婜壔偼晄廫暘偱偟偨丅忋偵忋偘偰偄偔抜奒乮儖乕僾娭悢乯偱丄僗僞乕僩埵抲偼偄偢傟傕僶儔僶儔偱丄備偭偨傝偲
僼儘乕僩偟偰偄傞傛偆側姶偠偱偡丅姶妎揑偵偼hi-z僺儞傪挷傋偰偄傞傛偆側偐傫偠偱偟傚偆偐
偗傟偳傕丄偁傞帪偐傜惓忢偵摦偄偰偄傑偟偨丅偁傞帪偲偼丄堦搙忋偑偭偰壓偑傞偲偒偐傜摨婜偟偰偄傑偟偨丅
偱丄偝偭偒傕偆堦搙帋偟偰傒偨偺偱偡偗偳丄昁偢偟傕丄慜夞偄偭偨僗働僢僠偱弶婜壔偑偆傑偔偄偔丄偲偄偆栿偱偼偁傝傑偣傫偱偟偨丅
偲偄偭偰傕丄儖乕僾晹偺嵟弶偺忋偘壓偘偱丄昁偢摨婜偟傑偟偨丅亖2夞栚偱摨婜偟偨丄偲偄偆帠偱偡丅
摨婜偡傞弖娫偼丄儚僀僷乕傪壓偘偰偄偔(A仺B)偲偒偵偦偺揹埑傪捠傝偡偓傞帪偵晅偄偰偄偔傛偆側姶偠偱偡丅
晄巚媍偲丄儚僀僷乕傪忋偘傞乮A偵嬤偯偗傞乯帪偵偼摨婜偟傑偣傫丅
偄偢傟偵偟偰傕丄儚僀僷乕憖嶌帺懱偼delay偼梫傝傑偣傫丅
揹尮偲摨帪搳擖側傜丄僺儞弶婜壔仺1ms掱搙delay仺2墲暅埵儚僀僷乕傪仾伀偝偣傟偽戝忎晇偩偲姶偠傑偟偨丅
儚僀僷乕A偵丄1儚僀僷乕暘偺掞峈偑巆傞丄偲偄偆偺偼丄掞峈抣偼嬼慠側偺偐傕偟傟傑偣傫丅
偱傕丄偙偺屄懱揑偵偼丄昁偢偦偆側偭偰偄傑偡丅
A傪5V懁偵偡傞偲丄ADC抣偼
990,997,1006,1014,1014,1014,乧
偲1014乮傕偟偔偼1015乯偱僺僞偭偲巭傑傝傑偡丅壓偘傞曽偼15,7,0,0,0,乧偱偡丅(7偺晹暘偼7偐8偱偡丅)
媡偵A傪0V懁偵偡傞偲丄23,15,7,7,7偺傛偆偵丄偦傟埲忋側傝傑偣傫丅B懁偼1007,1015,1023偺傛偆偵丄傄偨偭偲
嵟忋傑偱棃傑偡丅悢抣偼1儚僀僷乕暘偺8乮7乣9乯偱偡丅
儚僀僷乕傪A懁偵偄偭傁偄偵偟偰A-W掞峈抣傪寁應偡傞偲97.5兌掱搙偱偡丅
側偺偱丄97.5-24.5乮儚僀僷乕掞峈乯亖73兌
AB娫偺掞峈抣偼9.15k兌掱搙側偺偱丄9150/128亖71.5兌偲丄傎傏堦抳偟傑偡丅
仸悢抣偼愮墌埲壓偺偍傕偪傖僥僗僞乕側偺偱丄惓妋惈偵偼寚偗傑偡丅
偙偺屄懱偵娭偟偰偼丄傗偼傝慜夞偺揧晅恾偺傛偆側峔惉偵側偭偰偄傞偲峫偊偰娫堘偄側偄偲巚偄傑偡丅
偁偲丄掞峈抣偼16億僕僔儑儞偛偲偵掅偄傕偺偑偁傝傑偡丅(揧晅恾塃)
乮杮棃丄嵎偑8偵側傞偼偢偑偦偙偩偗5偵側傝傑偡乯
亙捛婰亜
僥僗僩拞丄僠儑僐僠儑僐曄偊傑偡偗偳丄壓婰偑僥僗僩僗働僢僠偱偡丅
偍偍傛偦丄偙傟偱丄偍偐偟偄摦偒傪尒偮偗傞偺偑柺搢側埵丄惓忢偵摦偒傑偡丅
仸嵟弶偼digitalWrite偱丄専徹偟偰偄偨偺偱偡偗偳丄digitalWrite偼50僋儘僢僋傎偳偐偐傝傑偡偐傜丄
丂bitSet/bitClear(2僋儘僢僋丠)偵曄偊傑偟偨丅
/*
AD5220 TEST PROGRAM
*/
#define clk 2
#define ud 3
#define ad_pin A0
word ad5220_val;
void clock(word num) {
while (num--) {
bitClear(PORTD, clk);
bitSet(PORTD, clk);
}
}
void ad5220_up() {
bitSet(PORTD, ud);
clock(1);
if (ad5220_val < 127)ad5220_val++;
}
void ad5220_down() {
bitClear(PORTD, ud);
clock(1);
if (ad5220_val > 0)ad5220_val--;
}
void setup() {
Serial.begin(115200);
pinMode(ud, OUTPUT);
pinMode(clk, OUTPUT);
bitSet(PORTD, clk);
bitSet(PORTD, ud);
clock(128);
bitClear(PORTD, ud);
clock(128);
ad5220_val = 0;
}
void loop() {
while (ad5220_val != 127) {
ad5220_up();
delay(5);
word adc = analogRead(ad_pin);
Serial.println(adc);
}
Serial.println("");
delay(2000);
while (ad5220_val != 0) {
ad5220_down();
delay(5);
word adc = analogRead(ad_pin);
Serial.println(adc);
}
Serial.println("");
delay(2000);
}
栆媿儘僢僋 2019/07/01(Mon) 00:53 No.1738 Re: 媈帡掞峈乕侾
栆媿儘僢僋偝傫丆偙傫偽傫偼丅
AD5220偺嵶偐偄専徹偺帒椏偁傝偑偲偆偛偞偄傑偡丅
偄偮傕側偑傜丆栆媿儘僢僋偝傫偺偔偩偝傞帒椏偺鉱枾偝偵傃偭偔傝偟偰傑偡丅
巹偼丆偍偍偞偭傁側専徹偟偐偟偰側偄偺偱丆側傫偲傕偄偊側偄偺偱偡偑丆
PWM僐儞僩儘乕儔乕偺儃儕儏乕儉偲丆AD5220傪擖傟懼偊偰丆
儌乕僞乕傪夞偟偨偲偙傠丆
掞峈傪彫偝偔偟偰偄偔偲丆儌乕僞乕偺夞揮偼丆弴師忋偑偭偰偄偔偺偱偡偑丆
偁傞応強偱丆忋偑傜側偄偱丆傓偟傠壓偑傞傛偆側報徾傪庴偗偨売強偑壗僇強偐偁傝傑偟偨丅
亜偁偲丄掞峈抣偼16億僕僔儑儞偛偲偵掅偄傕偺偑偁傝傑偡丅(揧晅恾塃)
亜乮杮棃丄嵎偑8偵側傞偼偢偑偦偙偩偗5偵側傝傑偡乯
傕偟偐偟偰丆偙傟偑尨場側偺偐側偲巚偄傑偟偨丅
巹偺帩偭偰傞傕偺偼丆侾侽侽倠兌偺傕偺側偺偱丆
傕偟摨偠傛偆側孹岦偑偁傞偺側傜丆扨弮寁嶼偺侾侽攞偱丆俁侽兌掱搙偱偟傚偆偐丆掅偄暔偑崿嵼偟偰傞偺偱偟傚偆偐偹丆専徹偺昁梫偼偁傞偲巚偄傑偡偑丅
偙偺俁侽兌掱搙偺掞峈偑壥偨偟偰丆巹偐姶偠偨夞揮悢偺掅壓偵偳偺掱搙娭學偟偰傞偺偐偼丆帺怣偼偁傝傑偣傫偑丒丒丒丒丒丅
MACH偺PID偺専徹傕傗傝偨偄側偲巚偭偰偄傞偺偱偡偑丆
僌儗僀僐乕僪偱摢書偊偰偄傑偡丅
側傫偲側偔棟夝偼偱偒偰偒偨偺偱偡偑丆捠忢偺僐乕僪傊偺曄姺摍丆
價僢僩憖嶌偺僆儞僷儗乕僪傒偨偄側偺偱丆摢偄偨偄偱偡丅
AD5220偺嵶偐偄専徹偺帒椏偁傝偑偲偆偛偞偄傑偡丅
偄偮傕側偑傜丆栆媿儘僢僋偝傫偺偔偩偝傞帒椏偺鉱枾偝偵傃偭偔傝偟偰傑偡丅
巹偼丆偍偍偞偭傁側専徹偟偐偟偰側偄偺偱丆側傫偲傕偄偊側偄偺偱偡偑丆
PWM僐儞僩儘乕儔乕偺儃儕儏乕儉偲丆AD5220傪擖傟懼偊偰丆
儌乕僞乕傪夞偟偨偲偙傠丆
掞峈傪彫偝偔偟偰偄偔偲丆儌乕僞乕偺夞揮偼丆弴師忋偑偭偰偄偔偺偱偡偑丆
偁傞応強偱丆忋偑傜側偄偱丆傓偟傠壓偑傞傛偆側報徾傪庴偗偨売強偑壗僇強偐偁傝傑偟偨丅
亜偁偲丄掞峈抣偼16億僕僔儑儞偛偲偵掅偄傕偺偑偁傝傑偡丅(揧晅恾塃)
亜乮杮棃丄嵎偑8偵側傞偼偢偑偦偙偩偗5偵側傝傑偡乯
傕偟偐偟偰丆偙傟偑尨場側偺偐側偲巚偄傑偟偨丅
巹偺帩偭偰傞傕偺偼丆侾侽侽倠兌偺傕偺側偺偱丆
傕偟摨偠傛偆側孹岦偑偁傞偺側傜丆扨弮寁嶼偺侾侽攞偱丆俁侽兌掱搙偱偟傚偆偐丆掅偄暔偑崿嵼偟偰傞偺偱偟傚偆偐偹丆専徹偺昁梫偼偁傞偲巚偄傑偡偑丅
偙偺俁侽兌掱搙偺掞峈偑壥偨偟偰丆巹偐姶偠偨夞揮悢偺掅壓偵偳偺掱搙娭學偟偰傞偺偐偼丆帺怣偼偁傝傑偣傫偑丒丒丒丒丒丅
MACH偺PID偺専徹傕傗傝偨偄側偲巚偭偰偄傞偺偱偡偑丆
僌儗僀僐乕僪偱摢書偊偰偄傑偡丅
側傫偲側偔棟夝偼偱偒偰偒偨偺偱偡偑丆捠忢偺僐乕僪傊偺曄姺摍丆
價僢僩憖嶌偺僆儞僷儗乕僪傒偨偄側偺偱丆摢偄偨偄偱偡丅
mabo 2019/07/01(Mon) 22:42 No.1739 Re: 媈帡掞峈乕侾
 MABO偝傫偺偼100k兌偩偭偨傫偱偡偐丅
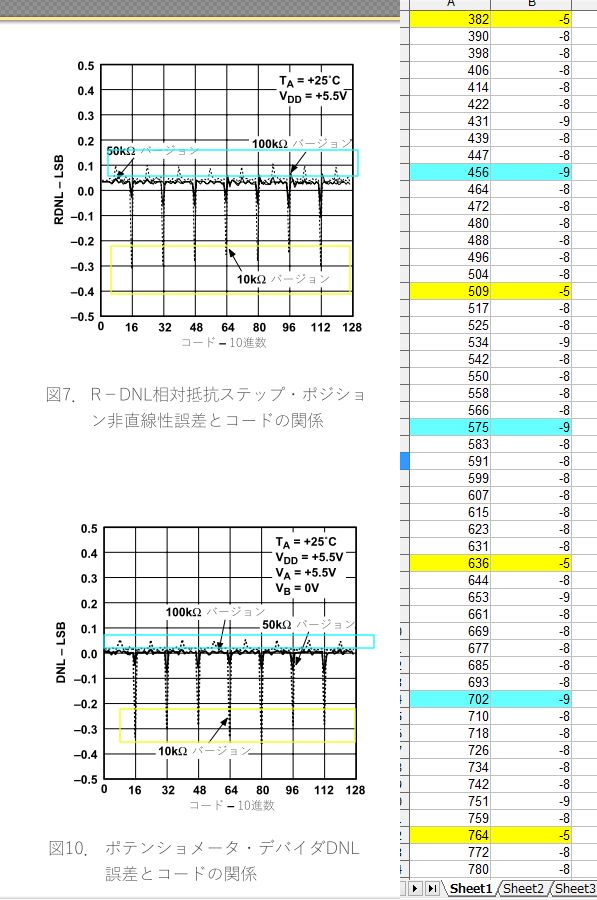
MABO偝傫偺偼100k兌偩偭偨傫偱偡偐丅偱傕丄100k兌偺曽偑僨乕僞僔乕僩揑偵偼岆嵎乮偺妱崌乯偑彮側偔彂偄偰偁傝傑偡丅
揧晅恾偱偼丄偳偪傜偑50k兌偐100k兌偐偼敾傝傑偣傫偗偳丄10k兌傛傝偼僶儔偮偒偑彮側偄偺偑尒偰庢傟傑偡丅
巹偺捠忢8枅偺偼偢偑16儚僀僷乕偍偒偵5偵側偭偰偄傞丄偲偄偆偺偼揧晅恾(僌儔僼)偺墿慄晹暘偩偲巚偄傑偡丅
偦偙偩偗-0.3LSB亖30亾掱搙丄掞峈偑掅偄偺偱丄8仺5偺曄壔偼擺摼偄偔悢帤偱偡丅
傛偔尒傞偲丄偦偺敿暘偺強偱丄+1偺9偵側偭偰偄傑偡丅偦傟偼僌儔僼偺偪傚偙偭偲嶳偵側偭偰偄傞晹暘乮悈怓乯偺
偣偄偩偲巚偄傑偡丅
傑偀丄栿偑暘偐傜側偄愢柧偑偁傝側偑傜傕丄擺摼偱偒傞晹暘傕偁傞姶偠偱偡偹丅
MABO偝傫偺尵偭偰偄傞偺偑16僷僀僷乕枅偺帠偱偼柍偔丄掞峈(儚僀僷乕)偑0兌傛傝偺慡懱揑側摦偒偺帠偱偟偨傜丄
懡暘丄揹棳偺棳傟偡偓偵傛傞丄揹埑掅壓側偺偱偼側偄偐偲梊憐偟傑偡丅
栆媿儘僢僋 2019/07/01(Mon) 23:21 No.1740 Re: 媈帡掞峈乕侾
栆媿儘僢僋偝傫丆偙傫偽傫偼丅
傑偨傑偨丆徻偟偄帒椏偁傝偑偲偆偛偞偄傑偡丅
儅僯儏傾儖偵嵹偭偰偄傞傫偱偡傛偹丅
僌儔僼尒偨偩偗偱丆栄寵偄偟偰丆夝庍偡傞偺偁偒傜傔偰傑偟偨丅
亜懡暘丄揹棳偺棳傟偡偓偵傛傞丄揹埑掅壓側偺偱偼側偄偐偲梊憐偟傑偡丅
偙偆偄偆偙偲傕偁傞傫偱偡偹丅
偙偺曈傕巹偺棟夝偺媦偽側偄偲偙傠偐側丆側傫偰巚偄傑偡丅
AD5220偵傪巊偭偰丆儌乕僞乕傪夞偟偨偲偒偵偼丆
夞揮悢摍丆徻偟偔傒偰側偄偺偱丆姶妎偱丆夞揮悢偑偝偑偭偨丆
偲敾抐偟偰傞偲偙傠傕偁傞偺偱丆夞揮悢偺昞帵偝偣偰丆
屻擔丆傒偰傒傛偆偲巚偄傑偡丅
崱丆晹嵽傪偄傠偄傠偁偨偭偰傑偡丅
傑偨傑偨丆徻偟偄帒椏偁傝偑偲偆偛偞偄傑偡丅
儅僯儏傾儖偵嵹偭偰偄傞傫偱偡傛偹丅
僌儔僼尒偨偩偗偱丆栄寵偄偟偰丆夝庍偡傞偺偁偒傜傔偰傑偟偨丅
亜懡暘丄揹棳偺棳傟偡偓偵傛傞丄揹埑掅壓側偺偱偼側偄偐偲梊憐偟傑偡丅
偙偆偄偆偙偲傕偁傞傫偱偡偹丅
偙偺曈傕巹偺棟夝偺媦偽側偄偲偙傠偐側丆側傫偰巚偄傑偡丅
AD5220偵傪巊偭偰丆儌乕僞乕傪夞偟偨偲偒偵偼丆
夞揮悢摍丆徻偟偔傒偰側偄偺偱丆姶妎偱丆夞揮悢偑偝偑偭偨丆
偲敾抐偟偰傞偲偙傠傕偁傞偺偱丆夞揮悢偺昞帵偝偣偰丆
屻擔丆傒偰傒傛偆偲巚偄傑偡丅
崱丆晹嵽傪偄傠偄傠偁偨偭偰傑偡丅
mabo 2019/07/03(Wed) 22:57 No.1741 Re: 媈帡掞峈乕侾
 X9C(10k兌)傕堦墳帋偟偨偺偱丄嵹偣偰偍偒傑偡丅
X9C(10k兌)傕堦墳帋偟偨偺偱丄嵹偣偰偍偒傑偡丅偙偪傜偺曽偼0乣5.0V傑偱摦偒傑偟偨丅乮惓妋偵偼ADC偱0乣1023偲偄偆帠偱偡乯
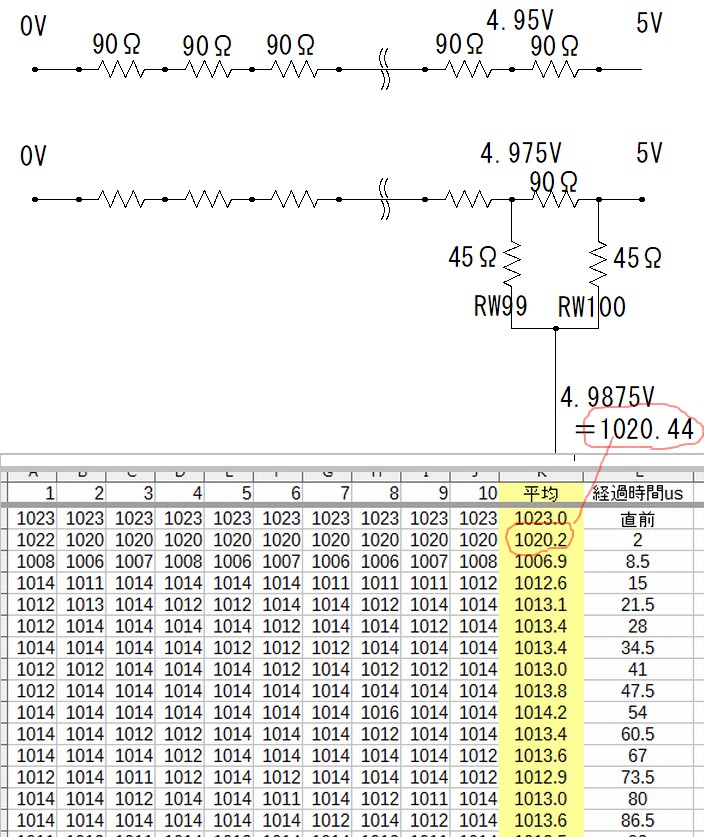
儚僀僷乕掞峈偼45兌掱搙丄A-B娫偺掞峈偼9.0k兌偱偟偨丅
乽make before break乿偼暲楍偵側傞偺偱丄掞峈抣偑壓偑傞偺偐偲巚偭偰偄偨偺偱偡偗偳
恾傪昤偄偰傒偨傜丄夁搉婜偼椉掞峈偺娫偵側傞偺偱偡偹丅
偮傑傝丄棟榑揑偵偼埨慡惈偑崅偔偰丄椙偄僨僶僀僗偲尵偊傞偲巚偄傑偡丅
偱丄傎傏AD5220偲摨偠傕偺偱帋偟偨偺偱偡偗偳丄1us偺娫妘偱偼懯栚偱偟偨丅
2us偵偟偨傜摦偒傑偟偨丅
僶儔偮偒偼AD5220偲摨偠掱搙偁傝傑偟偨丅偱傕丄16儚僀僷乕枅偲偄偆傢偗偱偼柍偔丄壗偲側偔偽傜偮偄偰偄傑偡丅
乽make before break乿偺帪娫偼僨乕僞僔乕僩偱偼暯嬒100us丄MAX偱500us偲側偭偰偄傑偡偗偳丄
5V懁乮儚僀僷乕埵抲99乯偐傜1偮壓偘偰娤應偟偰傒偨偺偱偡偗偳丄20us屻偵偼埨掕偟偨揹埑偵側偭偰偄傞傛偆偱偡丅
棟榑揑偵偼make偱暲楍忬懺偵側偭偨帪偼乽儚僀僷乕掞峈45兌亊2偺捈楍乿偲乽掞峈1偮暘偺90兌乿偺暲楍側偺偱丄偙偺晹暘偺崌惉掞峈偼45兌偱偡丅
偮傑傝丄揧晅恾壓偺傛偆偵側傝丄揹埑抣偱4.9875V丄adc抣偱偼1020.4偵憡摉偟傑偡丅
側偺偱丄昞偺2us屻偺晹暘偱婛偵暲楍忬懺偵側偭偰偄傞偲巚偄傑偡丅
乮壗屘偐偦偺屻丄堦抜奒壓偑偭偰偐傜埨掕偟傑偡乯
仸昞拞偺帪娫偼傾僶僂僩偱偡丅1,2妱偼堎側偭偰偄傞壜擻惈偼偁傝傑偡丅
崱夞偼儚僀僷乕埵抲偑摨偠晹暘乮99仺98乯偟偐傗傝傑偣傫偱偟偨偐傜丄傕偟偐偟偨傜堘偆埵抲偩偲摦嶌帪娫乮暲楍帪娫乯偑戝偒偔曄傢傞偺偐傕偟傟傑偣傫丅
偱傕丄僨乕僞僔乕僩偺帪娫100us傗500us偼丄嬯忣偑棃側偄傛偆偵丄偩偄傇戝偒偔尒愊傕偭偰偄傞丄偲偄偆報徾偱偡丅
傑偨丄偙偺掱搙偺帪娫仌曄摦側傜丄懸偪帪娫柍偟偵儚僀僷乕傪摦偐偟偰傕椙偝偦偆偱偡丅
仸晄婗敪惈儊儌儕偺曽偼帋偟偰偄傑偣傫丅CS偼LOW乮GND愙懕乯屌掕偱偡丅
栆媿儘僢僋 2019/07/07(Sun) 09:22 No.1742 Re: 媈帡掞峈乕侾
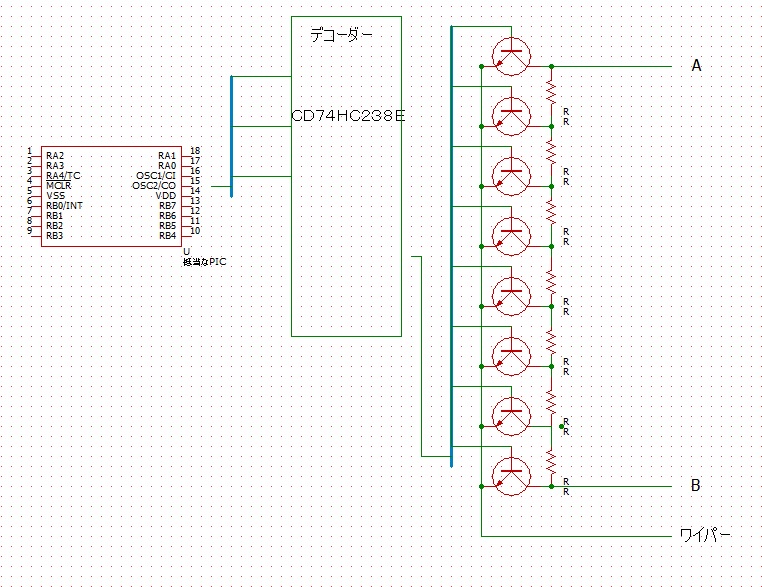
 庤嶌傝偺審偱偡偗偳丄嶲峫僒僀僩偺峔惉偑椙偄偲巚偄傑偡丅
庤嶌傝偺審偱偡偗偳丄嶲峫僒僀僩偺峔惉偑椙偄偲巚偄傑偡丅掅on掞峈偺僼僅僩MOS儕儗乕傪巊偆丄偭偰傗偮偱偡丅
FET偱峔惉偡傞偺傕壜擻偐傕偟傟傑偣傫偗偳丄壜曄掞峈晹乽埲奜乿偺夞楬傕抦傞昁梫偑偁傞偲巚偄傑偡丅
偱丄掞峈偼倃2偱晅偗偰偄偭偰丄儚僀僷乕埵抲偺忋偘壓偘偱偼柍偔丄乽晄昁梫側掞峈偺抁棈乿偲偄偭偨姶偠偵偡傟偽丄
10屄乮慻傒乯偱1024抜奒偵側傝傑偡丅
揧晅恾偱丄晧榑棟偱GPIO偵宷偄偱偄傑偡偐傜丄偦偺傑傑掞峈抣偲偟偰昞尰弌棃傑偡丅
掞峈偼屌掕掞峈偱榙偊側偄晹暘偼敿屌掕掞峈傪巊偆偟偐側偄偲巚偄傑偡丅
https://www.aliexpress.com/item/32956113030.html
MABO偝傫偺壜曄掞峈偼100k兌偲寢峔戝偒側抣偱偡偐傜丄
嶲峫僒僀僩偺TLP3100偺曽僆儞掞峈嵟戝50m兌偲偑崅惈擻偱偡偗偳丄
TLP241A偁偨傝偱傕慡慠栤戣柍偄偲巚偄傑偡丅乮僆儞掞峈嵟戝150m兌乯
AQV251G傕椙偝偦偆偩偭偨偺偱偡偗偳丄摿偵慐傔傞傎偳偱傕柍偐偭偨傒偨偄丅
https://www.aliexpress.com/item/32834495736.html
https://www.aliexpress.com/item/33008121998.html
仸TLP3100偼SMD僞僀僾偟偐柍偄傛偆偱偡丅
偁偲丄偙傟傜偼僞乕儞僆儞帪娫偑悢ms偐偐傝傑偡丅側偺偱丄昿斏偵僆儞/僆僼偟側偄傛偆偵偟偨曽偑椙偄偱偡丅
偮傑傝丄僾儘僌儔儉偱傑偭偨傝摦偐偡傛偆偵偟傑偡丅
仸僆僼側傜揹棳偑棳傟側偄偺偱敪擬偟側偄丅on偱傕掅on掞峈側偺偱敪擬偼彮側偄丅偱傕愗傝懼偊偺偲偒偼懡偔偺敪擬傪偡傞偺偱丄
1ms偲偐偱峏怴偡傞偲丄杦偳偺帪娫偑乽愗傝懼偊忬懺乿偵側傞壜擻惈偑偁傝傑偡丅
栆媿儘僢僋 2019/07/07(Sun) 11:16 No.1743 Re: 媈帡掞峈乕侾
栆媿儘僢僋偝傫丆偙傫偽傫偼丅
傑偨傑偨嵶偐偄専徹偺帒椏偁傝偑偲偆偛偞偄傑偡丅
儚僀僷乕偺堏摦偱丆愗傝懼偊偑捛偄偮偐側偄帪娫偑偁傞偲偄偆偐丆偙傟丆傕偟偐偟偰丆堄恾揑側偺偐傕偱偡偹丅
尰嵼偺愙懕傪愗抐偟偰偐傜丆椬偺愙懕傪偡傞丆偲偄偆偺偱偼側偔偰丆椬傪愙懕偟偰偐傜丆尰嵼傪愗抐丆偙傫側庤弴側偺偱偟傚偆偐丅
僾儘僌儔儉慻傓偲偒偼丆偦偺曈傕峫椂偟側偄偲丆
巚偭偨寢壥偵側傜側偄偺偱偟傚偆偑丆巹偺応崌丆尩枾側張棟偡傞栿偱偼側偄偺偱丆偦傟傎偳婥偵側傜側偄偲巚偄傑偡丅
偦傟偐傜丆晹嵽偺偛徯夘傕偁傝偑偲偆偛偞偄傑偡丅
巹傕丆僼僅僢僩儕儗乕偵偟傛偆偐側偲巚偭偰傑偟偨偑丆
TLP3100丂偼丆抣抜偑崅偄傫偱偡傛偹丅
偦傟偵丆SMD偩偲丆榁娽偺栚偵偼尩偟偄偐側側傫偰偹丅乮徫乯
偲傝偁偊偢摦偗偽偄偄偐側丆側傫偰巚偭偰傞偺偱丆
廐寧偺
http://akizukidenshi.com/catalog/g/gI-08029/
偁偨傝巊偍偆偐側偲巚偭偰傑偡偑丆偍抪偢偐偟偄榖丆
ON掞峈偵偮偄偰丆崅偄偺偐掅偄偺偐敾暿偑偮偐側偄偱偄傑偡丅
傑偨傑偨嵶偐偄専徹偺帒椏偁傝偑偲偆偛偞偄傑偡丅
儚僀僷乕偺堏摦偱丆愗傝懼偊偑捛偄偮偐側偄帪娫偑偁傞偲偄偆偐丆偙傟丆傕偟偐偟偰丆堄恾揑側偺偐傕偱偡偹丅
尰嵼偺愙懕傪愗抐偟偰偐傜丆椬偺愙懕傪偡傞丆偲偄偆偺偱偼側偔偰丆椬傪愙懕偟偰偐傜丆尰嵼傪愗抐丆偙傫側庤弴側偺偱偟傚偆偐丅
僾儘僌儔儉慻傓偲偒偼丆偦偺曈傕峫椂偟側偄偲丆
巚偭偨寢壥偵側傜側偄偺偱偟傚偆偑丆巹偺応崌丆尩枾側張棟偡傞栿偱偼側偄偺偱丆偦傟傎偳婥偵側傜側偄偲巚偄傑偡丅
偦傟偐傜丆晹嵽偺偛徯夘傕偁傝偑偲偆偛偞偄傑偡丅
巹傕丆僼僅僢僩儕儗乕偵偟傛偆偐側偲巚偭偰傑偟偨偑丆
TLP3100丂偼丆抣抜偑崅偄傫偱偡傛偹丅
偦傟偵丆SMD偩偲丆榁娽偺栚偵偼尩偟偄偐側側傫偰偹丅乮徫乯
偲傝偁偊偢摦偗偽偄偄偐側丆側傫偰巚偭偰傞偺偱丆
廐寧偺
http://akizukidenshi.com/catalog/g/gI-08029/
偁偨傝巊偍偆偐側偲巚偭偰傑偡偑丆偍抪偢偐偟偄榖丆
ON掞峈偵偮偄偰丆崅偄偺偐掅偄偺偐敾暿偑偮偐側偄偱偄傑偡丅
mabo 2019/07/08(Mon) 00:13 No.1744 Re: 媈帡掞峈乕侾
1僇強宷偖偩偗偺曽幃側傜丄摿暿椙偄傕偺偼梫傜側偄偲巚偄傑偡丅
偗傟偳傕丄掅掞峈晹乮摿偵掞峈0偺埵抲乯偼偦傟側傝偺揹棳偑棳偣傞傕偺偑椙偄偱偡丅
TLP291偼嵟戝愨懳掕奿偱50mA偱偟偨丅偦傟偱廩暘偐偳偆偐偼丠偱偡丅
嵟戝愨懳掕奿偱20mA偺AD5220偱丄嵟崅懍嬤偔偄偭偨偺側傜戝忎晇側偺偐傕偟傟傑偣傫丅
傑偨丄偦偙偩偗暲楍偵偟偪傖偆偺傕丄庤偐傕偟傟傑偣傫偹丅
僼僅僩僇僾儔乮弌椡晹偑僼僅僩僩儔儞僕僗僞乯偩偲丄摿惈偲偟偰丄僆儞帪偵堦掕偺揹埑偑僄儈僢僞-僐儗僋僞娫偵
巆傞偲巚偄傑偡丅乮0.2V偲偐0.3V偲偐丅僟僀僆乕僪偵嬤偄姶偠偩偲巚偄傑偡乯
偱丄椺偊偽丄10屄巊偭偰丄暋悢愙懕偡傞曽幃偩偲揹埑抣偲偟偰2.5V慜屻偼棊偪傑偡偐傜丄梡搑揑偵崌偄傑偣傫丅
嵟崅懍偼弌側偄偲偄偆寢壥偵側傝傑偡偟丄拞娫晹偺寁嶼傕弌棃傑偣傫丅
僼僅僩MOS儕儗乕側傜丄僆儞掞峈偱昞偣傞傛偆偵丄柍帇偱偒傞傎偳偺掅僆儞掞峈側傜懡愙懕乮抁棈曽幃乯偱傕忋庤偔峴偔偲巚偄傑偡丅
傑偨丄僼僅僩僇僾儔偑捠忢丄悢廫乣悢昐mA弌椡偵懳偟偰丄僼僅僩MOS儕儗乕偼悢昐mA乣悢A傑偱棳偣傑偡丅
偨偩偟丄僗僀僢僠儞僌帪娫偼埑搢揑偵僼僅僩僇僾儔偺曽偑憗偄偱偡丅扨埵偑us偲ms偺堘偄偑偁傝傑偡丅
巹傕僼僅僩僇僾儔乮PC817乯側傜戲嶳帩偭偰偄傑偡偗偳乮ALI偱100屄偱200墌掱搙偱攧偭偰偄傑偡乯悢傪暲傋傞偺傕柺搢偱偡丅
74HC595傕1屄5墌掱搙偱偁傝傑偡偐傜丄嶌傟側偄傢偗偱偼柍偄偲巚偆偺偱偡偗偳丄懡偔偺僺儞偵攝慄偟側偔偰偼側傜側偄丄偲偄偆晹暘偱嶌傞偺偑戝曄偱偟傚偆偹丅
傗偼傝丄暘夝擻傪弌偡側傜僼僅僩MOS儕儗乕偵暘偑偁傞偲巚偄傑偡丅
16埲壓偺暘夝擻偱椙偄側傜丄僼僅僩僇僾儔偱丄偲偄偭偨姶偠偱偟傚偆偐丅
仸暘夝擻16偱傕http://akizukidenshi.com/catalog/g/gI-12192/偁偨傝傪4偮巊偭偰丄4僺儞偱惂屼偡傞曽偑妝偱偡丅
MABO偝傫偺応崌偼丄掞峈抣偑崅偄壜曄掞峈偱偡偟丄偦傟傎偳崅婡擻乮掅僆儞掞峈乯偺僼僅僩MOS儕儗乕偼昁梫側偄偲巚偄傑偡丅
偗傟偳傕丄掅掞峈晹乮摿偵掞峈0偺埵抲乯偼偦傟側傝偺揹棳偑棳偣傞傕偺偑椙偄偱偡丅
TLP291偼嵟戝愨懳掕奿偱50mA偱偟偨丅偦傟偱廩暘偐偳偆偐偼丠偱偡丅
嵟戝愨懳掕奿偱20mA偺AD5220偱丄嵟崅懍嬤偔偄偭偨偺側傜戝忎晇側偺偐傕偟傟傑偣傫丅
傑偨丄偦偙偩偗暲楍偵偟偪傖偆偺傕丄庤偐傕偟傟傑偣傫偹丅
僼僅僩僇僾儔乮弌椡晹偑僼僅僩僩儔儞僕僗僞乯偩偲丄摿惈偲偟偰丄僆儞帪偵堦掕偺揹埑偑僄儈僢僞-僐儗僋僞娫偵
巆傞偲巚偄傑偡丅乮0.2V偲偐0.3V偲偐丅僟僀僆乕僪偵嬤偄姶偠偩偲巚偄傑偡乯
偱丄椺偊偽丄10屄巊偭偰丄暋悢愙懕偡傞曽幃偩偲揹埑抣偲偟偰2.5V慜屻偼棊偪傑偡偐傜丄梡搑揑偵崌偄傑偣傫丅
嵟崅懍偼弌側偄偲偄偆寢壥偵側傝傑偡偟丄拞娫晹偺寁嶼傕弌棃傑偣傫丅
僼僅僩MOS儕儗乕側傜丄僆儞掞峈偱昞偣傞傛偆偵丄柍帇偱偒傞傎偳偺掅僆儞掞峈側傜懡愙懕乮抁棈曽幃乯偱傕忋庤偔峴偔偲巚偄傑偡丅
傑偨丄僼僅僩僇僾儔偑捠忢丄悢廫乣悢昐mA弌椡偵懳偟偰丄僼僅僩MOS儕儗乕偼悢昐mA乣悢A傑偱棳偣傑偡丅
偨偩偟丄僗僀僢僠儞僌帪娫偼埑搢揑偵僼僅僩僇僾儔偺曽偑憗偄偱偡丅扨埵偑us偲ms偺堘偄偑偁傝傑偡丅
巹傕僼僅僩僇僾儔乮PC817乯側傜戲嶳帩偭偰偄傑偡偗偳乮ALI偱100屄偱200墌掱搙偱攧偭偰偄傑偡乯悢傪暲傋傞偺傕柺搢偱偡丅
74HC595傕1屄5墌掱搙偱偁傝傑偡偐傜丄嶌傟側偄傢偗偱偼柍偄偲巚偆偺偱偡偗偳丄懡偔偺僺儞偵攝慄偟側偔偰偼側傜側偄丄偲偄偆晹暘偱嶌傞偺偑戝曄偱偟傚偆偹丅
傗偼傝丄暘夝擻傪弌偡側傜僼僅僩MOS儕儗乕偵暘偑偁傞偲巚偄傑偡丅
16埲壓偺暘夝擻偱椙偄側傜丄僼僅僩僇僾儔偱丄偲偄偭偨姶偠偱偟傚偆偐丅
仸暘夝擻16偱傕http://akizukidenshi.com/catalog/g/gI-12192/偁偨傝傪4偮巊偭偰丄4僺儞偱惂屼偡傞曽偑妝偱偡丅
MABO偝傫偺応崌偼丄掞峈抣偑崅偄壜曄掞峈偱偡偟丄偦傟傎偳崅婡擻乮掅僆儞掞峈乯偺僼僅僩MOS儕儗乕偼昁梫側偄偲巚偄傑偡丅
栆媿儘僢僋 2019/07/08(Mon) 16:41 No.1745 Re: 媈帡掞峈乕侾
栆媿儘僢僋偝傫丆偙傫偽傫偼丅
偄傠偄傠傾僪僶僀僗偁傝偑偁偲偆偛偞偄傑偡丅
杮擔丆晹嵽傪侟寧偵拲暥偟傑偟偨丅
憲椏偨偩偄偡傞傋偔丆暠敪偟偰偟傑偄傑偟偨丅
偙傟偱丆偟偽傜偔偍偲側偟偔偡傞傛偆偱偡丅
僄儞僐乕僟乕偼埨偄偺偵偟傛偆偲巚偄傑偟偨偑丆
僠儍僞儕儞僌懳嶔摍丆庤娫庢傝偦偆側偺偱丆
儅儖僣偺偙偆岝妛幃偵偡傞梊掕偱偡丅
僱僢僩偱偔偖偭偨偺偱偡偑丆侾侽俀僞僀僾偺掞峈傾儗僀偼丆
儅儖僣偲僨僕僉乕偁偨傝偟偐庢傝埖偄側偄傫偱偡傛偹丅
儅儖僣偼傕偆偪傚偭偲専摙偟偰偐傜丆拲暥偟傑偡丅
偦傟偲丆傾僫儘僌僗僀僢僠側傞IC傕偁傞偺偱偡偹丅
偄傠偄傠偁偝偭偰偄偰丆栚偵偲傑傝傑偟偨丅
http://akizukidenshi.com/catalog/g/gI-05673/
傾僫儘僌偱傕丆僨僕僞儖偱傕崅懍僗僀僢僠儞僌偑壜擻丆
偲儅僯儏傾儖偵偼婰嵹偁傝傑偡丅
偦傟偵丆掅ON掞峈丂俆侽兌丂偲偁傝傑偡丅
忬嫷偵傕傛傞偺偱偟傚偆偑丆偙傟偑崅偄偺偐丆掅偄偺偐丆
巹偵偼偪傚偭偲敾抐偱偒傑偣傫丅
偄傠偄傠偁偝偭偰偄偰丆
PID偺惂屼偵傕嫽枴偑岦偄偰偒傑偟偨丅
僾儘僌儔儉傕偦傟傎偳擄偟偔側偄傛偆側偺偱丆
http://akiracing.com/2017/12/19/arduino_drone_pid/
屻擔丆挧愴偟偰傒傛偆偐側偲巚偄傑偡丅
庤巒傔偵夞揮悢庢摼偺僾儘僌儔儉偁傟偙傟傗偭偰傑偡丅
偄傠偄傠傾僪僶僀僗偁傝偑偁偲偆偛偞偄傑偡丅
杮擔丆晹嵽傪侟寧偵拲暥偟傑偟偨丅
憲椏偨偩偄偡傞傋偔丆暠敪偟偰偟傑偄傑偟偨丅
偙傟偱丆偟偽傜偔偍偲側偟偔偡傞傛偆偱偡丅
僄儞僐乕僟乕偼埨偄偺偵偟傛偆偲巚偄傑偟偨偑丆
僠儍僞儕儞僌懳嶔摍丆庤娫庢傝偦偆側偺偱丆
儅儖僣偺偙偆岝妛幃偵偡傞梊掕偱偡丅
僱僢僩偱偔偖偭偨偺偱偡偑丆侾侽俀僞僀僾偺掞峈傾儗僀偼丆
儅儖僣偲僨僕僉乕偁偨傝偟偐庢傝埖偄側偄傫偱偡傛偹丅
儅儖僣偼傕偆偪傚偭偲専摙偟偰偐傜丆拲暥偟傑偡丅
偦傟偲丆傾僫儘僌僗僀僢僠側傞IC傕偁傞偺偱偡偹丅
偄傠偄傠偁偝偭偰偄偰丆栚偵偲傑傝傑偟偨丅
http://akizukidenshi.com/catalog/g/gI-05673/
傾僫儘僌偱傕丆僨僕僞儖偱傕崅懍僗僀僢僠儞僌偑壜擻丆
偲儅僯儏傾儖偵偼婰嵹偁傝傑偡丅
偦傟偵丆掅ON掞峈丂俆侽兌丂偲偁傝傑偡丅
忬嫷偵傕傛傞偺偱偟傚偆偑丆偙傟偑崅偄偺偐丆掅偄偺偐丆
巹偵偼偪傚偭偲敾抐偱偒傑偣傫丅
偄傠偄傠偁偝偭偰偄偰丆
PID偺惂屼偵傕嫽枴偑岦偄偰偒傑偟偨丅
僾儘僌儔儉傕偦傟傎偳擄偟偔側偄傛偆側偺偱丆
http://akiracing.com/2017/12/19/arduino_drone_pid/
屻擔丆挧愴偟偰傒傛偆偐側偲巚偄傑偡丅
庤巒傔偵夞揮悢庢摼偺僾儘僌儔儉偁傟偙傟傗偭偰傑偡丅
mabo 2019/07/09(Tue) 23:25 No.1746 Re: 媈帡掞峈乕侾
椙偄偱偡偹偉丄岝妛幃丅巹偼偍傕偪傖僄儞僐乕僟偽偭偐傝偱偡丅
廐寧偱攧偭偰傞LED晅偒傕巊偄傑偟偨丅
傾僫儘僌僗僀僢僠IC偼揹婥偼偁傑傝棳偣傑偣傫傛丅
20mA掱搙傑偱棳偣傑偡偗偳丄棳偣偽弌椡揹埑偼曄傢傝傑偡丅
偙偺曈傝偼丄儅僀僐儞偺弌椡偲摨偠偱偡丅
僆儞掞峈50兌偼9V嬱摦帪偺昗弨抣偱偡丅
4.5V嬱摦偩偲丄70兌昗弨偱丄嵟戝100兌偱偡丅
偱丄100兌偩偲偟偨傜20mA棳偣偽100x0.02亖2V傕揹埑偑壓崀偟傑偡丅
側偺偱丄揹埑抣偑廳梫側応崌偼揹棳傪棳偟偰偼偄偗傑偣傫丅
> 庤巒傔偵夞揮悢庢摼偺僾儘僌儔儉偁傟偙傟傗偭偰傑偡丅
扨弮側僆僼僞僀儅乕乮7僙僌偲儕儗乕偲儘乕僞儕乕僄儞僐乕僟傪巊偭偨傕偺乯偱丄傛偔巊偄傑偡偗偳丄
仜仜帪仜仜暘傑偱偁傞偺偱丄儘乕僞儕乕僄儞僐乕僟偲偄偊偳傕壛懍偝偣側偄偲側偐側偐栚揑抣傑偱払偟傑偣傫丅
偱丄憗偔夞偟偨帪偼+8/僋儕僢僋埵丠傑偱偝偣傞偲巚偆偺偱偡偗偳丄偄偄墫攡傪尒偮偗傞偺偑柺敀偄強偐傕偟傟傑偣傫丅
廐寧偱攧偭偰傞LED晅偒傕巊偄傑偟偨丅
傾僫儘僌僗僀僢僠IC偼揹婥偼偁傑傝棳偣傑偣傫傛丅
20mA掱搙傑偱棳偣傑偡偗偳丄棳偣偽弌椡揹埑偼曄傢傝傑偡丅
偙偺曈傝偼丄儅僀僐儞偺弌椡偲摨偠偱偡丅
僆儞掞峈50兌偼9V嬱摦帪偺昗弨抣偱偡丅
4.5V嬱摦偩偲丄70兌昗弨偱丄嵟戝100兌偱偡丅
偱丄100兌偩偲偟偨傜20mA棳偣偽100x0.02亖2V傕揹埑偑壓崀偟傑偡丅
側偺偱丄揹埑抣偑廳梫側応崌偼揹棳傪棳偟偰偼偄偗傑偣傫丅
> 庤巒傔偵夞揮悢庢摼偺僾儘僌儔儉偁傟偙傟傗偭偰傑偡丅
扨弮側僆僼僞僀儅乕乮7僙僌偲儕儗乕偲儘乕僞儕乕僄儞僐乕僟傪巊偭偨傕偺乯偱丄傛偔巊偄傑偡偗偳丄
仜仜帪仜仜暘傑偱偁傞偺偱丄儘乕僞儕乕僄儞僐乕僟偲偄偊偳傕壛懍偝偣側偄偲側偐側偐栚揑抣傑偱払偟傑偣傫丅
偱丄憗偔夞偟偨帪偼+8/僋儕僢僋埵丠傑偱偝偣傞偲巚偆偺偱偡偗偳丄偄偄墫攡傪尒偮偗傞偺偑柺敀偄強偐傕偟傟傑偣傫丅
栆媿儘僢僋 2019/07/09(Tue) 23:58 No.1747 媈帡壜曄掞峈
 mabo偝傫偍偼傛偆偛偞偄傑偡丅
mabo偝傫偍偼傛偆偛偞偄傑偡丅僨僕僞儖億僥儞僔儑儞偵戙偊偰丄mabo偝傫偺媈帡壜曄掞峈傪惂屼偡傞僾儘僌儔儉傪巒傔傛偆偲巚偄傑偡丅
媂偟偔偍婅偄偟傑偡丅
偲巚偄傑偟偨偑丄
Tr偼僔儞僋嬱摦偱偡傛偹
嬱摦偡傞傕偺偺偑側偄偐傜揹棳偑棳傟側偄
嵟忋抜偺Tr
曉帠偼媫偓傑偣傫丅
捛婰
儚僀僷偲揹尮抂巕娫偺掞峈傪寁應偡傞応崌丄TR傪捠偠傞傛偆偵側傞偺偱偼丅
TR 2019/06/20(Thu) 07:43 No.1700
Re: 媈帡壜曄掞峈
 俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅俿俼偝傫丆偛傔傫側偝偄丆夞楬偺偙偲傛偔傢偐傜側偄偺偱丆
柧妋側摎偊偼丆丠偱偡丅
偨偩丆抂偑偆傑偔偄偐側偄応崌偼丆揧晅偺傛偆偵偟偰傕偄偄偐側丆
偲峫偊偰偄傑偟偨丅偙偆偡傞偲丆儚僀僷乕嵟抂偵堏摦偟偰傕丆掞峈巆傝傑偡偑丅
偙偺曽偑嵟埆偺偙偲峫偊偰傕偄偄傛偆側婥傕偟傑偡丅
慡晹偺掞峈傗傜丆揹棳偼丆僩儔儞僕僗僞傪捠偟偨傕偺偵側傞偲巚偄傑偡偺偱丆
尭悐偼偁傞偲巚偄傑偡丅
偦傟偐傜丆僩儔儞僕僗僞偺攋懝摍峫偊傞偲丆僼僅僩僇僾儔乕傪偼偝傫偱丆愨墢偟偨曽偑偄偄偐側偲巚偄傑偟偨丅
偦傟偐傜丆僾儘僌儔儉偱偡偑丆
崱傑偱偺傕偺夵曄偡傟偽巊偊傞偲巚偄傑偡丅
侾侽俀俁偱暯嬒庢偭偨傕偺傪丆8抜奒偵偡傞丅
up丒down偺僒僽娭悢傪曄峏偡傞丆摍偱壜擻偩偲巚偄傑偡丅
偨偩丆up丒down丂偺娭悢偱丆僨僐乕僟乕偵怣崋傪憲傞傛偆偵
側傞偲巚偄傑偡偑丆儗僕僗僞俁屄偵憲傞偺偱懡彮庤娫偐偐傞偲巚偄傑偡丅
僨乕僞乕僔乕僩偱偼丆
丂丂丂丂侾侽恑悢
丂LLL丂仺丂侽
丂LLH丂仺丂侾
丂LHL丂仺丂俀
丂LHH丂仺丂俁
丂HLL 仺丂係
丂HLH丂仺丂俆
丂HHL丂仺丂俇
丂HHH丂仺丂俈
偱偡偺偱丆
丂丂PORTA亖俆
偺傛偆偵偟偰偟傑偊偽丆堦搙偵憲傟傑偡偑丆
丂丂乮HLH仺俆丂傪憲傞応崌乯
丂丂RA0=俆
丂丂RA1=俆>>侾
丂丂RA2=俆>>俀
傒偨偄偵丆僔僼僩偡傞偐丆儅僗僋偐偗偰偦傟偧傟憲傞
傛偆偱偟傚偆偐偹丅
傑偁丆俉捠傝偱偡偺偱丆慡晹婰弎偟偰偍偄偰傕偄偄偺偱偟傚偆偗偳丆
丂丂case 0:丂RA0=0;//侾侽恑悢侽傪憲傞
丂丂丂丂丂丂RA1=0;
丂丂丂丂丂丂RA2=0;
丂丂case 1:丂RA0=1;//侾侽恑悢侾傪憲傞
丂丂丂丂丂丂RA1=0
RA2=0;
丂丂case 2:RA0=0;//侾侽恑悢俀偭傪憲傞
丂丂丂丂丂丂RA1=1;
丂丂丂丂丂丂RA2=0;
丂丒丒丒丒丒丒
丂丒丒丒丒丒丒
丂丂case 7;RA0=1;//侾侽恑悢俈傪憲傞
丂丂丂丂丂丂RA1=1;
丂丂丂丂丂丂RA2=1;
丂偦傟偲丆巊偊偦偆側掞峈傾儗僀尒偰傒傑偟偨偗偳丆
丂儅儖僣偱侾侽俀偲昞婰偺偁傞傕偺偱偟傚偆偐偹丅
丂巆擮側偑傜丆廐寧偵偼丆巊偊偦偆側僞僀僾偼丆側偄傛偆偱偟偨丅
mabo 2019/06/20(Thu) 22:49 No.1701 Re: 媈帡壜曄掞峈
 mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅帺暘傕丄搳崀偟偨屻偵丄僼僅僩僇僾儔傪巊偭偨曽朄傪巚偄偮偒傑偟偨丅
偱傕丄儚僀僷乕偲揹尮懁娫偺掞峈抣偺儔僀儞傪揹棳偑棳傟傞宍偱偡傛偹丅
偦偆偄偭偨丄巊偄曽偼揔摉側傫偩傠偆偐偲偄偆媈栤偑巆傝傑偡丅
Tr撪傪棙梡偟偰偺掞峈傪巊偭偰暘埑偡傞偲偄偭偨偙偲傪弶傔偰峫偊偰傒偨偺偱丄
媈栤偵姶偠傑偟偨丅
愭払幰偺幚椺偑偁傟偽偄偄偺偱偡偑丅
屻丄崱夞偺宍偺応崌丄摉弶偐傜偁偭偨Tr偼丄捛壛偺僼僅僩僇僾儔偑偁傞偺偱
Tr偑2屄偵側偭偨宍偲側傞偺偱丄
摉弶偺Tr偼偄傜側偄偲巚偄傑偡丅
偙偺傑傑偩偲丄僟乕儕儞僩儞愙懕偺宍偱偡丅
偝傜偵丄
僼僅僩僇僾儔偺巊偄曽偺応崌丄僔儞僋偱傕僜乕僗偱傕OK側偺偱丄
塃忋偵愝偗偨掞峈偼晄梫偱偡傛丅
怓乆偲偡傒傑偣傫丅
TR 2019/06/21(Fri) 06:20 No.1702 Re: 媈帡壜曄掞峈
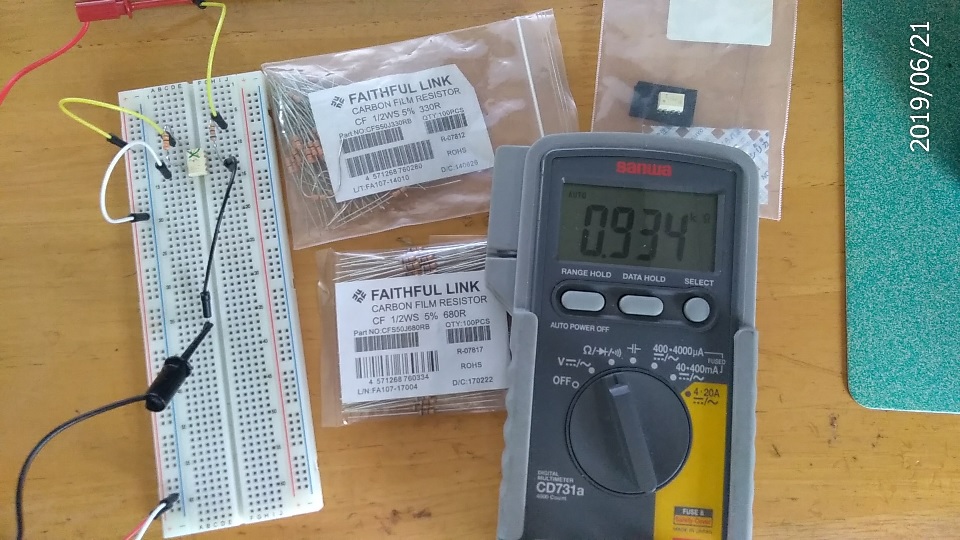 娙扨偩偭偨偺偱丄幚尡偟傑偟偨丅
娙扨偩偭偨偺偱丄幚尡偟傑偟偨丅傗偼傝憐憸偟偰偄偨偲偍傝偱丄
Tr撪傪捠偠偨応崌丄掞峈抣偑戝偒偔曄傢傝傑偡丅
旐寁應掞峈抣680兌偑幨恀偺條偵栺0.9倠偵側傝傑偟偨丅
捛婰
mabo偝傫偼丄No1681偱丄5220偺僥僗僩寢壥偲偟偰
伀
仏仏仏仏仏仏仏仏仏仏
儚僀僷乕椉抂傑偱丆摦偐偡偲丆曅懁侽俈倠兌丂曅懁侽丏俀倠兌掱搙巆傝傑偡丅
丂偦傟偐傜丆俹俬俠丂俙俢俆俀俀侽偺揹尮偺擖傟曽偱丆
丂僐儞僩儘乕儖偱偒側偔側傞応崌偑偁傞傛偆偱偡丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
偙偺帪偺幚尡偺嵺丄PIC偺僾儘僌儔儉偼丄栆媿儘僢僋偝傫偺偱偡偐丠
偦傟偲傕丄mabo偝傫偺No1693偱偡偐丠丠
mabo偝傫偺偲斾傋偰丄嵎偑偁偭偨偺偱偟傚偆偐丠丠
偦傟偲丄
揹尮偺擖傟曽偱丄栤戣偑偁偭偨傛偆偱偡偑丄栤戣夝徚偺偨傔偵
No1693偺僾儘僌儔儉偱偼丄偳偺傛偆偵偟偨偺偱偟傚偆偐丠
x9c偒傑偟偨偐丄帺暘偺5220偼丄柧屻擔偵偼棃傞偲巚偄傑偡
TR 2019/06/21(Fri) 07:00 No.1703 Re: 媈帡壜曄掞峈
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俿俼偝傫丆偄傠偄傠偁傝偑偲偆偛偞偄傑偡丅
亖亖亖亖亖亖
亜偦偆偄偭偨丄巊偄曽偼揔摉側傫偩傠偆偐偲偄偆媈栤偑巆傝傑偡丅
巹傕丆帺暘偱峫偊偰偍偒側偑傜丆偄偮傕丆俿俼偝傫偑偍彂偒偄偨偩偄偨傛偆側偙偲峫偊偰偟傑偄傑偡丅
偦偺揰丆偄傠傫側堄枴偱丆棟榑揑側攚宨偺偁傞彅孼偑偆傜傗傑偟偄偱偡丅
亖亖亖亖亖亖
亜摉弶偺Tr偼偄傜側偄偲巚偄傑偡丅
僨僐乕僟俬俠偺僪儔僀僽擻椡偺僨乕僞僔乕僩傒偰側偄偺偱丆
傑偁丆偄傟偲偗偽丆栤戣側偄偐側丆埵偺婥帩偪偱偄傟傑偟偨丅
懡暘丆擖傟側偔偰傕丆僪儔僀僽擻椡偼偩偄偠傚偆偱偟傚偆偹丅
栚揑偑堘偆偺偱偡偑丆俈僙僌偺僟僀僫儈僢僋昞帵偱偼丆
僩儔儞僕僗僞擖傟偰傞夞楬傕傒偐偗傑偡偺偱丆
偦傟傕丆摢偵偁偭偨偺偐傕偱偡偹丅
亖亖亖亖亖
亜塃忋偵愝偗偨掞峈偼晄梫偱偡傛丅
偙傟傕怺偄堄枴偼偁傝傑偣傫丅摉弶丆倃俋俠摍偺庢愢尒偨偲偒丆
嵟抂偱傕係侽兌掱搙偺掞峈偑偁傞丆偺昞婰偱丆侾俈侽侾偺傛偆側峔憿偐側丆偲丆憗偲偪傝偟傑偟偨丅
枩偑堦丆巊偭偰傞僇僾儔乕傗僩儔儞僕僗僞乕偑丆僔儑乕僩偡傞
曽岦偱丆僷儞僋偟偨偲偒丆懡彮偺埨慡曎偵側傞偐側丆
埵偺堄幆偱丆偄傟傑偟偨偺偱丆戝偒側堄枴側偄偱偡丅
僔儞僋丂偐丂僜乕僗偐丆側傫偰偙偲傕丆峫偊偰偄傑偣傫偱偟偨丅
亖亖亖亖亖亖亖
亜儚僀僷乕椉抂傑偱丆摦偐偡偲丆曅懁侽俈倠兌丂曅懁侽丏俀倠兌掱搙巆傝傑偡丅
偙傟妋偐傔偨偺丆僞僋僩僗僀僢僠傪巊偭偨妱傝崬傒傪巊偭偨帺暘偺僾儘僌儔儉偱偡丅
亖亖亖亖亖亖
亜揹尮偺擖傟曽偱丄栤戣偑偁偭偨傛偆偱偡偑丄栤戣夝徚偺偨傔偵
亜No1693偺僾儘僌儔儉偱偼丄偳偺傛偆偵偟偨偺偱偟傚偆偐丠
堦斒揑側丆俹俠摍偺揹尮偺擖傟曽偱偟偰偄傑偟偨丅
堦斣偺僲僀僘偑戝偒偄偲憐掕偝傟傞儌乕僞乕偼丆堦斣嵟弶偵偄傟偰丆師偺傛偆偵偟偰傑偟偨丅
丂儌乕僞乕丂仺丂俙俢俆俀俀侽丂仺丂俹俬俠
傗偼傝偙傟偩偲偩傔偱偟偨丅
俹俠偺揹尮偺擖傟曽偼丆廃曈婡婍偺擣幆偺栤戣傕偁傞偺偱丆
廃曈婡婍偐傜俷俶偡傞偺偑堦斒揑偩偲巚偄傑偡偑丆偙傟偑偩傔偱偟偨丅
俹俬俠偺揹尮傪屻偵偡傞偲丆俹俬俠婲摦帪偺塭嬁偐丆俙俢俆俀俀侽偑僐儞僩儘乕儖偱偒側偔側傞丆偲慜夞偵婰弎偟偨偲偙傠偱偡丅
偦傟偱丆媡偵偟丆俹俬俠傪愭偵俷俶偵偟偰傒偨偺偱偡偑丆俢俆俀俀侽偺揹尮傪擖傟傞帪偵偼丆俹俬俠懁偱偺丆弶婜壔偑廔傢偭偰偟傑偆偺偱丆
嵟弶偆傑偔偄偒傑偣傫偱偟偨丅
偦傟偱丆俹俬俠偺僾儘僌儔儉偱丆弶婜壔偺慜偵偄傠偄傠僂僄僀僩傪擖傟偰偨傔偟傑偟偨丅
偨偩丆姶偠偲偟偰丆弶婜壔偺奐巒偼丆僂僄僀僩傪傟偰傕丆曄壔側偄傛偆側姶偠偱偟偨偱偟偨丅
偦傫側偙傫側偱丆偄傠偄傠傗偭偰傒偰丆俹俬俠偺億乕僩偺弶婜壔偺慜偵侾夞丆
俙俢俆俀俀侽偺慜偵1夞丆偦傟偧傟丆僂僄僀僩偄傟偰丆
俹俬俠偺婲摦屻丆栺堦昩埲撪偵俙俢俆俀俀侽傪俷俶偵偟偨帪
偑傎傏侾侽侽亾僐儞僩儘乕儖偱偒偨丆偲偄偆忬懺偱偡丅
亜偙偺帪偺幚尡偺嵺丄PIC偺僾儘僌儔儉偼丄栆媿儘僢僋偝傫偺偱偡偐丠
亜偦傟偲傕丄mabo偝傫偺No1693偱偡偐丠丠
亜mabo偝傫偺偲斾傋偰丄嵎偑偁偭偨偺偱偟傚偆偐丠丠
栆媿儘僢僋偝傫偺僾儘僌儔儉偼丆俙俢曄姺偱丆儚僀僷乕偱亀摦偐偟偰偄傑偡偺偱丆
帺暘偺偱妋擣偟偨偩偗偱偡偺偱丆堘偄偼丆暘偐傝傑偣傫丅
亖亖亖亖
幚嵺偵俙俢俆俀俀侽摍傪巊偆偵偼丆俹俬俠懁偺憖嶌偱丆
俙俢俆俀俀侽偺揹尮俷俶偺帪娫傪抶傜偣傞摍偺乕僪揑側張抲傕昁梫側偺偐側偲巚偄傑偟偨丅
偨偩丆巆擮側偑傜丆偄傑傑偱丆偄傠傫側俫俹傪尒偰偒傑偟偨偑丆
廃曈婡婍偺婲摦傪僴乕僪偱抶傜偣偰傞丆傕偺偼丆側偐偭偨傛偆偵巚偄傑偡丅
庤朄揑偵偼丆偦傟傎偳庤娫偐偐傜側偄傛偆側偒偑偟傑偡丅
俿俼偝傫丆偄傠偄傠偁傝偑偲偆偛偞偄傑偡丅
亖亖亖亖亖亖
亜偦偆偄偭偨丄巊偄曽偼揔摉側傫偩傠偆偐偲偄偆媈栤偑巆傝傑偡丅
巹傕丆帺暘偱峫偊偰偍偒側偑傜丆偄偮傕丆俿俼偝傫偑偍彂偒偄偨偩偄偨傛偆側偙偲峫偊偰偟傑偄傑偡丅
偦偺揰丆偄傠傫側堄枴偱丆棟榑揑側攚宨偺偁傞彅孼偑偆傜傗傑偟偄偱偡丅
亖亖亖亖亖亖
亜摉弶偺Tr偼偄傜側偄偲巚偄傑偡丅
僨僐乕僟俬俠偺僪儔僀僽擻椡偺僨乕僞僔乕僩傒偰側偄偺偱丆
傑偁丆偄傟偲偗偽丆栤戣側偄偐側丆埵偺婥帩偪偱偄傟傑偟偨丅
懡暘丆擖傟側偔偰傕丆僪儔僀僽擻椡偼偩偄偠傚偆偱偟傚偆偹丅
栚揑偑堘偆偺偱偡偑丆俈僙僌偺僟僀僫儈僢僋昞帵偱偼丆
僩儔儞僕僗僞擖傟偰傞夞楬傕傒偐偗傑偡偺偱丆
偦傟傕丆摢偵偁偭偨偺偐傕偱偡偹丅
亖亖亖亖亖
亜塃忋偵愝偗偨掞峈偼晄梫偱偡傛丅
偙傟傕怺偄堄枴偼偁傝傑偣傫丅摉弶丆倃俋俠摍偺庢愢尒偨偲偒丆
嵟抂偱傕係侽兌掱搙偺掞峈偑偁傞丆偺昞婰偱丆侾俈侽侾偺傛偆側峔憿偐側丆偲丆憗偲偪傝偟傑偟偨丅
枩偑堦丆巊偭偰傞僇僾儔乕傗僩儔儞僕僗僞乕偑丆僔儑乕僩偡傞
曽岦偱丆僷儞僋偟偨偲偒丆懡彮偺埨慡曎偵側傞偐側丆
埵偺堄幆偱丆偄傟傑偟偨偺偱丆戝偒側堄枴側偄偱偡丅
僔儞僋丂偐丂僜乕僗偐丆側傫偰偙偲傕丆峫偊偰偄傑偣傫偱偟偨丅
亖亖亖亖亖亖亖
亜儚僀僷乕椉抂傑偱丆摦偐偡偲丆曅懁侽俈倠兌丂曅懁侽丏俀倠兌掱搙巆傝傑偡丅
偙傟妋偐傔偨偺丆僞僋僩僗僀僢僠傪巊偭偨妱傝崬傒傪巊偭偨帺暘偺僾儘僌儔儉偱偡丅
亖亖亖亖亖亖
亜揹尮偺擖傟曽偱丄栤戣偑偁偭偨傛偆偱偡偑丄栤戣夝徚偺偨傔偵
亜No1693偺僾儘僌儔儉偱偼丄偳偺傛偆偵偟偨偺偱偟傚偆偐丠
堦斒揑側丆俹俠摍偺揹尮偺擖傟曽偱偟偰偄傑偟偨丅
堦斣偺僲僀僘偑戝偒偄偲憐掕偝傟傞儌乕僞乕偼丆堦斣嵟弶偵偄傟偰丆師偺傛偆偵偟偰傑偟偨丅
丂儌乕僞乕丂仺丂俙俢俆俀俀侽丂仺丂俹俬俠
傗偼傝偙傟偩偲偩傔偱偟偨丅
俹俠偺揹尮偺擖傟曽偼丆廃曈婡婍偺擣幆偺栤戣傕偁傞偺偱丆
廃曈婡婍偐傜俷俶偡傞偺偑堦斒揑偩偲巚偄傑偡偑丆偙傟偑偩傔偱偟偨丅
俹俬俠偺揹尮傪屻偵偡傞偲丆俹俬俠婲摦帪偺塭嬁偐丆俙俢俆俀俀侽偑僐儞僩儘乕儖偱偒側偔側傞丆偲慜夞偵婰弎偟偨偲偙傠偱偡丅
偦傟偱丆媡偵偟丆俹俬俠傪愭偵俷俶偵偟偰傒偨偺偱偡偑丆俢俆俀俀侽偺揹尮傪擖傟傞帪偵偼丆俹俬俠懁偱偺丆弶婜壔偑廔傢偭偰偟傑偆偺偱丆
嵟弶偆傑偔偄偒傑偣傫偱偟偨丅
偦傟偱丆俹俬俠偺僾儘僌儔儉偱丆弶婜壔偺慜偵偄傠偄傠僂僄僀僩傪擖傟偰偨傔偟傑偟偨丅
偨偩丆姶偠偲偟偰丆弶婜壔偺奐巒偼丆僂僄僀僩傪傟偰傕丆曄壔側偄傛偆側姶偠偱偟偨偱偟偨丅
偦傫側偙傫側偱丆偄傠偄傠傗偭偰傒偰丆俹俬俠偺億乕僩偺弶婜壔偺慜偵侾夞丆
俙俢俆俀俀侽偺慜偵1夞丆偦傟偧傟丆僂僄僀僩偄傟偰丆
俹俬俠偺婲摦屻丆栺堦昩埲撪偵俙俢俆俀俀侽傪俷俶偵偟偨帪
偑傎傏侾侽侽亾僐儞僩儘乕儖偱偒偨丆偲偄偆忬懺偱偡丅
亜偙偺帪偺幚尡偺嵺丄PIC偺僾儘僌儔儉偼丄栆媿儘僢僋偝傫偺偱偡偐丠
亜偦傟偲傕丄mabo偝傫偺No1693偱偡偐丠丠
亜mabo偝傫偺偲斾傋偰丄嵎偑偁偭偨偺偱偟傚偆偐丠丠
栆媿儘僢僋偝傫偺僾儘僌儔儉偼丆俙俢曄姺偱丆儚僀僷乕偱亀摦偐偟偰偄傑偡偺偱丆
帺暘偺偱妋擣偟偨偩偗偱偡偺偱丆堘偄偼丆暘偐傝傑偣傫丅
亖亖亖亖
幚嵺偵俙俢俆俀俀侽摍傪巊偆偵偼丆俹俬俠懁偺憖嶌偱丆
俙俢俆俀俀侽偺揹尮俷俶偺帪娫傪抶傜偣傞摍偺乕僪揑側張抲傕昁梫側偺偐側偲巚偄傑偟偨丅
偨偩丆巆擮側偑傜丆偄傑傑偱丆偄傠傫側俫俹傪尒偰偒傑偟偨偑丆
廃曈婡婍偺婲摦傪僴乕僪偱抶傜偣偰傞丆傕偺偼丆側偐偭偨傛偆偵巚偄傑偡丅
庤朄揑偵偼丆偦傟傎偳庤娫偐偐傜側偄傛偆側偒偑偟傑偡丅
mabo 2019/06/22(Sat) 00:16 No.1704 Re: 媈帡壜曄掞峈
 mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅亜偄傠偄傠傗偭偰傒偰丆俹俬俠偺億乕僩偺弶婜壔偺慜偵侾夞丆
俙俢俆俀俀侽偺慜偵1夞丆偦傟偧傟丆僂僄僀僩偄傟偰丆
俹俬俠偺婲摦屻丆栺堦昩埲撪偵俙俢俆俀俀侽傪俷俶偵偟偨帪
偑傎傏侾侽侽亾僐儞僩儘乕儖偱偒偨丆偲偄偆忬懺偱偡丅
丒mabo偝傫偺僾儘僌儔儉No1693偲忋婰愢柧傪尒斾傋偰暘偐傝傑偟偨丅
帺暘傕丄嶲峫偵偟傑偡丅桳擄偆偛偞偄傑偡丅
媈帡壜曄掞峈偵巊偭偨僼僅僩僇僾儔乕偱偡偑丄幚尡寢壥偵傛傝屌掕掞峈偺戙傢傝偵側傞偺偼娫堘偄側偄偲巚偄傑偡丅
T倰偺撪晹掞峈偲弴揹棳偺娭學偑偳偆偐側偲偄偭偨偲偙傠偑偁偭偰丄惂屼偵巊偆偺偼僐僣偑偄傞偐傕偟傟傑偣傫偹丅
仏仏仏仏仏仏仏仏仏仏仏仏仏亄亄亄亄亄亄亄亄亄亄亄亄亄亄亄亄
丂丂5220摓拝偵旛偊
丒杮棃偺怣崋偺棳傟偱偁傞SEC婎斅偐傜偺怣崋偼丄MACH偺婎杮廃攇悢乮200Hz憐掕乯傪庴偗傞偙偲偵側傝傑偡偑丄
崱傑偱丄
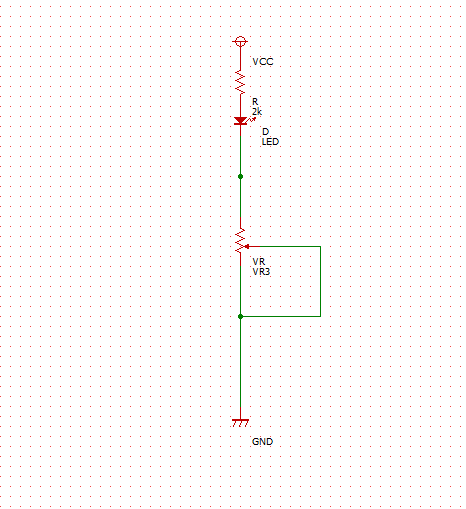
DC俆V乣VR乣PIC乮AD曄姺偟偰X9c嬱摦僾儘僌儔儉乯乣x9c乣LED乮掞峈晅壛乯偱偟偨丅
崱夞偼丄
DC5V乣VR乣PIC(PWM240Hz敪惗)乣
儘乕僷僗乮儘乕僇僢僩200Hz乯乣
PIC乮AD曄姺撪憼偺X9c嬱摦僾儘僌儔儉乯乣
5220乮扨偵丄儚僀僷偲壓曽偺Rl抂巕娫偺忬嫷傪尒傞乯
偺曽朄傕僾儔僗偟偰丄偲偟傑偟偨丅
仏AD曄姺撪憼偺5220嬱摦僾儘僌儔儉偼丄栆媿儘僢僋偝傫偵mabo偝傫偺傪僾儔僗偟傑偡丅
PIC(PWM240Hz敪惗)偺晹暘傪捛壛偟偨偺偱丄MACH乮PWM婎杮廃攇悢240Hz)偵帡偣偨忬嫷偵偟傑偟偨丅
傑偭丄揔摉偐偳偆偐晄柧偱偡偑丅
幚嵺丄
PIC(PWM240Hz敪惗)偵LED傪晅偗傞偲丄岝曽偵斄偑弌傞偺偑暘偐傝傑偟偨丅
栚帇偱妋擣偱偒傞偺偐偲傕嬃偒傑偟偨両
崱夞偼丄OSCCON偺愝掕偲偐傑偠傔偵峫偊傑偟偨丅
幨恀傪嵹偣傑偟偨丅嶼弌曽朄傪忔偣偨幨恀偱偡偑丄偁偭偰偄傑偡偐丠
尒偰傗偭偰偔偩偝偄丅
媂偟偔偍婅偄偟傑偡丅
PIC16F1827
TR 2019/06/22(Sat) 09:40 No.1705 Re: 媈帡壜曄掞峈
 mabo偝傫傊丄5220偑杮擔摓拝偟傑偟偨丅
mabo偝傫傊丄5220偑杮擔摓拝偟傑偟偨丅屵屻偐傜丄擲偭偰偄傑偟偨偑丄傑偭偨偔摦嶌偟傑偣傫丅
僾儘僌儔儉偼丄No1671偱偡丅
僥僗僩梡僾儘僌儔儉偑側偄偺偱丄巊偄傑偟偨丅
僥僗僩曽朄偼幨恀偺偮側偓曽偱偡丅
崱夞偼丄夡傟側偄傛偆偵2倠僆乕儉偺掞峈偱偡丅
TR 2019/06/22(Sat) 15:47 No.1708 Re: 媈帡壜曄掞峈
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俿俼偝傫丆偄傠偄傠傗傜傟偰偄傑偡偹丅
偪傚偭偲丆晄柧側揰側偺偱偡偑丆
俿俼偝傫偑崱擔丆傗傜傟偨偺偼丆俽俤俠偝傫偺婎斦偲愗傝棧偟偰丆
俵俙俠俫偐傜偺俹倂俵偺怣崋偺戙傢傝偵丆儃儕儏乕儉偱丆
揹埑挷惍偟偰丆俹俬俠偵擖傟偰偺幚尡偱偟偨偐丅
偦傟偲丆揹埑寁傜傟偨偺偼丆擖椡偵巊偭偨儃儕儏乕儉偱偟傚偆偐丅
偦傟偲傕丆倃俋俠偱寁傜傟偨偺偱偡偐丅
偪傚偭偲晄柧偱偡丅
崱擔偼丆嶐擔偺憪姞傝偺塭嬁偊旀傟愗偭偰偄傑偡偺偱丆
儃働亅僢丂偲丆偟傑偟偨丅
偄傠偄傠偁偝偭偰偨偺偱偡偑丆摨偠傛偆側偙偲傗偭偰偄傞
彅孼傪尒偮偗傑偟偨丅
偨偩丆俠俶俠摍偺僐儞僩儘乕儖偱偼側偔丆僆乕僨傿僆偺儃儕儏乕儉偺挷惍偺傛偆偱偡丅
http://mikenekosou.blog76.fc2.com/blog-entry-140.html
偙偺巊偄曽偼丆揹棳惂屼丂側傫偱偟傚偆偹丅
弶傔偰抦傝傑偟偨偑丆儗僆僗僞僢僪丒儌乕僪偲偐尵偆傒偨偄偱偡丅
僾儘僌儔儉偑偺偭偰側偄偺偱丆傛偔暘偐傝傑偣傫偑丆
偙偺彅孼偼丆俹俬俠偱丂摨帪偵暋悢偺僇僾儔乕傪俷俶偵偟偰丆
僐儞僩儘乕儖偟偰傞傛偆側姶偠偱偡偐偹丅
偦傟偲丆婡夿揑側儕儗乕偲摨摍埲忋偺僼僅僢僩僇僾儔乕偺徯夘傕偁傝傑偟偨丅
崅偄偱偡丅俆侽侽墌慜屻偡傞傒偨偄偱偡偹丅
俿俼偝傫丆偄傠偄傠傗傜傟偰偄傑偡偹丅
偪傚偭偲丆晄柧側揰側偺偱偡偑丆
俿俼偝傫偑崱擔丆傗傜傟偨偺偼丆俽俤俠偝傫偺婎斦偲愗傝棧偟偰丆
俵俙俠俫偐傜偺俹倂俵偺怣崋偺戙傢傝偵丆儃儕儏乕儉偱丆
揹埑挷惍偟偰丆俹俬俠偵擖傟偰偺幚尡偱偟偨偐丅
偦傟偲丆揹埑寁傜傟偨偺偼丆擖椡偵巊偭偨儃儕儏乕儉偱偟傚偆偐丅
偦傟偲傕丆倃俋俠偱寁傜傟偨偺偱偡偐丅
偪傚偭偲晄柧偱偡丅
崱擔偼丆嶐擔偺憪姞傝偺塭嬁偊旀傟愗偭偰偄傑偡偺偱丆
儃働亅僢丂偲丆偟傑偟偨丅
偄傠偄傠偁偝偭偰偨偺偱偡偑丆摨偠傛偆側偙偲傗偭偰偄傞
彅孼傪尒偮偗傑偟偨丅
偨偩丆俠俶俠摍偺僐儞僩儘乕儖偱偼側偔丆僆乕僨傿僆偺儃儕儏乕儉偺挷惍偺傛偆偱偡丅
http://mikenekosou.blog76.fc2.com/blog-entry-140.html
偙偺巊偄曽偼丆揹棳惂屼丂側傫偱偟傚偆偹丅
弶傔偰抦傝傑偟偨偑丆儗僆僗僞僢僪丒儌乕僪偲偐尵偆傒偨偄偱偡丅
僾儘僌儔儉偑偺偭偰側偄偺偱丆傛偔暘偐傝傑偣傫偑丆
偙偺彅孼偼丆俹俬俠偱丂摨帪偵暋悢偺僇僾儔乕傪俷俶偵偟偰丆
僐儞僩儘乕儖偟偰傞傛偆側姶偠偱偡偐偹丅
偦傟偲丆婡夿揑側儕儗乕偲摨摍埲忋偺僼僅僢僩僇僾儔乕偺徯夘傕偁傝傑偟偨丅
崅偄偱偡丅俆侽侽墌慜屻偡傞傒偨偄偱偡偹丅
mabo 2019/06/22(Sat) 22:14 No.1711 Re: 媈帡壜曄掞峈
崱擔偺幚尡
幚尡偺宷偓曽偱偡偹丅
DC5.1V揹尮乣VR乣PIC乮PWAM敪惗乯乣儘乕僷僗乣PIC乮0622/5220嬱摦僾儘僌儔儉乯乣AD5220乣僥僗僞乕
傑偩丄SEC婎斅傗ML4偵偼怗傟偰偄傑偣傫丅
億僥儞僔儑儞儊乕僞乕偼丄AD5220偑崱擔棃偨偺偱丄弶傔偰巊偄傑偟偨丅
揹埑應掕売強偼丄AD5220偺儚僀僷乕乣Rl娫偱偡丅
幚尡偺宷偓曽偱偡偹丅
DC5.1V揹尮乣VR乣PIC乮PWAM敪惗乯乣儘乕僷僗乣PIC乮0622/5220嬱摦僾儘僌儔儉乯乣AD5220乣僥僗僞乕
傑偩丄SEC婎斅傗ML4偵偼怗傟偰偄傑偣傫丅
億僥儞僔儑儞儊乕僞乕偼丄AD5220偑崱擔棃偨偺偱丄弶傔偰巊偄傑偟偨丅
揹埑應掕売強偼丄AD5220偺儚僀僷乕乣Rl娫偱偡丅
TR 2019/06/22(Sat) 22:32 No.1712 Re: 媈帡壜曄掞峈
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俿俼偝傫偺幚尡娐嫬傢偐傝傑偟偨丅
偁傝偑偲偆偛偞偄傑偡丅
俹倂俵偺敪惗偵娭偡傞婰嵹偑偁偭偨偺偱丆偪傚偭偲偁傟丆偲巚偭偨師戞偱偡丅
偛帺暘偱僾儘僌儔儉偝傟偨丆俹倂俵怣崋傪擖椡偵偍巊偄側傫偱偡偹丅
椆夝偄偨偟傑偟偨丅
俙俢俆俀俀侽係埨掕偟傑偣傫偐丅
偪傚偭偲丆尨場偼暘偐傝傑偣傫丅
俠俴俲偲倀乛俢扨恎傪僾儖傾僢僾偡傞偐偟側偄偐偱傕丆
巹偺応崌嫇摦偑曄壔偟傑偟偨丅
傛偔傢偐傜偵偺偱偡偑丆俠俽抂巕偼屌掕偟偰偁傝傑偡偑丆
偙偺曄傕傕偟偐偟偰娭學偁傞偺偐傕偟傟傑偣傫丅
奜晹偐傜偺僲僀僘庴偗傗偡偄偺偱偟傚偆偐偹丅
偙偺曈偼丆帺嶌偟偨曽偑丆僲僀僘摍偵偼嫮偄偐傕偱偡偹丅
俿俼偝傫偦傟偐傜丆僾儘僌儔儉偱偡偑丆
while (AD5220_val>0)AD5220_down;
AD5220_down丂仺仺丂AD5220_down(丂);
偱偟傚偆偐偹丅
偦傟偲丆
while (AD5220_val>0)
while (AD5220_val)
偼丆寢嬊摨偠堄枴偩偲巚偄傑偡丅AD5220_val丂偺曄悢偼丆
AD5220_down(丂)偺僒僽娭悢撪偱丆侽丂偵側傞傑偱丆儅僀僫僗偝傟傑偡丅
while乮K)丂偼丆K偺晹暘偑侽埲奜偩偲儖乕僾偝傟偰丆
侽偵側傞偲丆儖乕僾傪敳偗傞偺偱摨偠堄枴偐偲巚偄傑偡丅
慜夞偼僞僋僩僗僀僢僠巊偭偰丆AD5220偺僐儞僩儘乕儖偟傑偟偨偑丆
廐寧偺埨偄僄儞僐乕僟乕偱丆傗偭偰傒傛偆偐側側傫偰丆
偄傠偄傠夋嶔偟偰傑偡丅
偦傟偲丆帺嶌偺僨僕僞儖億僥儞僔儑儊乕僞乕乮僨僕億僢僩乯偵昁梫側晹嵽丆
傑偲傔偰偄傑偡丅
俿俼偝傫偺幚尡娐嫬傢偐傝傑偟偨丅
偁傝偑偲偆偛偞偄傑偡丅
俹倂俵偺敪惗偵娭偡傞婰嵹偑偁偭偨偺偱丆偪傚偭偲偁傟丆偲巚偭偨師戞偱偡丅
偛帺暘偱僾儘僌儔儉偝傟偨丆俹倂俵怣崋傪擖椡偵偍巊偄側傫偱偡偹丅
椆夝偄偨偟傑偟偨丅
俙俢俆俀俀侽係埨掕偟傑偣傫偐丅
偪傚偭偲丆尨場偼暘偐傝傑偣傫丅
俠俴俲偲倀乛俢扨恎傪僾儖傾僢僾偡傞偐偟側偄偐偱傕丆
巹偺応崌嫇摦偑曄壔偟傑偟偨丅
傛偔傢偐傜偵偺偱偡偑丆俠俽抂巕偼屌掕偟偰偁傝傑偡偑丆
偙偺曄傕傕偟偐偟偰娭學偁傞偺偐傕偟傟傑偣傫丅
奜晹偐傜偺僲僀僘庴偗傗偡偄偺偱偟傚偆偐偹丅
偙偺曈偼丆帺嶌偟偨曽偑丆僲僀僘摍偵偼嫮偄偐傕偱偡偹丅
俿俼偝傫偦傟偐傜丆僾儘僌儔儉偱偡偑丆
while (AD5220_val>0)AD5220_down;
AD5220_down丂仺仺丂AD5220_down(丂);
偱偟傚偆偐偹丅
偦傟偲丆
while (AD5220_val>0)
while (AD5220_val)
偼丆寢嬊摨偠堄枴偩偲巚偄傑偡丅AD5220_val丂偺曄悢偼丆
AD5220_down(丂)偺僒僽娭悢撪偱丆侽丂偵側傞傑偱丆儅僀僫僗偝傟傑偡丅
while乮K)丂偼丆K偺晹暘偑侽埲奜偩偲儖乕僾偝傟偰丆
侽偵側傞偲丆儖乕僾傪敳偗傞偺偱摨偠堄枴偐偲巚偄傑偡丅
慜夞偼僞僋僩僗僀僢僠巊偭偰丆AD5220偺僐儞僩儘乕儖偟傑偟偨偑丆
廐寧偺埨偄僄儞僐乕僟乕偱丆傗偭偰傒傛偆偐側側傫偰丆
偄傠偄傠夋嶔偟偰傑偡丅
偦傟偲丆帺嶌偺僨僕僞儖億僥儞僔儑儊乕僞乕乮僨僕億僢僩乯偵昁梫側晹嵽丆
傑偲傔偰偄傑偡丅
mabo 2019/06/23(Sun) 22:01 No.1714 Re: 媈帡壜曄掞峈
mabo偝傫丄偙傫偽傫偼丅
mabo偝傫偺5220僾儘僌儔儉偱偡偑丄
PIC偺弶婜愝掕娭悢傪傒傞偲丄弶婜壔偺慜偵500倣倱偺僂僄僀僩傪2夞晅偗偰偄傑偡偑丄
5220偼丄揹尮傪擖傟傞偲掞峈抣偑敿暘偵側傞偺偱丄
嵟弶偵丄儚僀僷偐傜丄揹尮揹埑偺敿暘偑弌椡偝傟傑偣傫偐丠
丂丂丂婰
* 儊僀儞偺張棟 *
*******************************************************************************/
void main(void)
{
int i ;
char s[17] ;
char mes[6]= {0xbd,0xc0,0xb0,0xc4,0x00} ; // "僗僞乕僩"暥帤偺僇僞僇僫僨乕僞
//static unsigned char buff[12];
OSCCON = 0b01110010 ; // 撪晹僋儘僢僋偼俉俵俫倸偲偡傞
__delay_ms(500);
__delay_ms(500);
偦傟偲帺暘偺5220偱偡偑丄揹埑傪忋偘偰偄偔搑拞丄
僥僗僞乕傪尒偰偄傞偲丄堦弖偖偭偲嶳偑弌傑偡丅
屻丄巆棷揹埑偱偡偑丄寀岝摂偵斀墳偟偰偄傑偡丅
傗偭傁傝丄埨掕偟傑偣傫偹丅
mabo偝傫偺5220僾儘僌儔儉偱偡偑丄
PIC偺弶婜愝掕娭悢傪傒傞偲丄弶婜壔偺慜偵500倣倱偺僂僄僀僩傪2夞晅偗偰偄傑偡偑丄
5220偼丄揹尮傪擖傟傞偲掞峈抣偑敿暘偵側傞偺偱丄
嵟弶偵丄儚僀僷偐傜丄揹尮揹埑偺敿暘偑弌椡偝傟傑偣傫偐丠
丂丂丂婰
* 儊僀儞偺張棟 *
*******************************************************************************/
void main(void)
{
int i ;
char s[17] ;
char mes[6]= {0xbd,0xc0,0xb0,0xc4,0x00} ; // "僗僞乕僩"暥帤偺僇僞僇僫僨乕僞
//static unsigned char buff[12];
OSCCON = 0b01110010 ; // 撪晹僋儘僢僋偼俉俵俫倸偲偡傞
__delay_ms(500);
__delay_ms(500);
偦傟偲帺暘偺5220偱偡偑丄揹埑傪忋偘偰偄偔搑拞丄
僥僗僞乕傪尒偰偄傞偲丄堦弖偖偭偲嶳偑弌傑偡丅
屻丄巆棷揹埑偱偡偑丄寀岝摂偵斀墳偟偰偄傑偡丅
傗偭傁傝丄埨掕偟傑偣傫偹丅
TR 2019/06/24(Mon) 19:06 No.1717 Re: 媈帡壜曄掞峈
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俙俢俆俀俀侽偵偮偄偰偼丆揹埑偼應偭偰撪偺偱晄柧偱偡偑丆
俹倂俵僐儞僩儘乕儔偺儃儕儏乕儉偲抲偒姺偊偰丆
儌乕僞乕偺僐儞僩儘乕儖偱丆敾抐偟偰傑偡偑丆
埨掕偟側偄偲偒偼丆儌乕僞乕偑夞傜側偐偭偨傝丆
夞偭偨傝偱丆偒偪傫偲僐儞僩儘乕儖偑偱偒傞偲偒偼丆
抲偒姺偊慜偺儃儕儏乕儉偱偺僐儞僩儘乕儖偲摨偠掱搙偵僐儞僩儘乕儖偱偒傑偟偨丅
亜嵟弶偵丄儚僀僷偐傜丄揹尮揹埑偺敿暘偑弌椡偝傟傑偣傫偐丠
懡暘丆偙傟丆惓忢偐傕偟傟傑偣傫丅
儅僯儏傾儖偵丆嵟弶偼儚僀僷乕偑丆俇係偺偲偙傠偵偁傞丆偲偺婰弎偑偁偭偨傛偆偵巚偄傑偡丅
弶婜壔偑偆傑偔偄偐側偄偲偺偙偲偱偡偑丆
俹倂俵敪惗仺仺丂儘乕僷僗丂仺仺丂俹俬俠乮俙俢曄姺乯丂仺仺丂俙俢俆俀俀侽
偱偍傗傝偱偟傚偆偐丅
俹倂俵敪惗偲儘乕僷僗傪奜偟偰丆
儃儕儏乕儉乮曅懁俆倁乯傪俹俬俠愙懕偟偰俙俢曄姺偟偰傒偰丆
寢壥傪尒偰偼偳偆偱偟傚偆偐丅
偦傟偲丆偍巊偄偺晹僾儘僌儔儉偼丆俶倧侾俇俈侾偺偱偡偐丅
曄峏偟偰側偗傟偽丆弶婜壔婰弎偑丆main丂偺側偐偵側偄傛偆偱偡偑丒丒丒丒丒丅
亖亖亖亖捛婰偱偡亖亖亖亖
亜GND偵偟偰偁傝傑偡丅丂偙傟埲忋偺曽朄偼偳偆偄偭偨曽朄側偺偱偟傚偆偐丠
堄枴偁傞偺偐偼暘偐傝傑偣傫偑丆CS抂巕傕僾儖傾僢僾偱PIC偵偮側偄偱丆
AD俆俀俀侽偺弶婜壔偺慜偵丆
丂RB俀=侽;乮CS傪偮側偄偱偁傞PIC抂巕乯
丂__delay_ms乮俆侽侽乯丟
丂AD5220_init()丟
偲偐傗偭偨傜偳偆側偺偐側偲巚偄傑偟偨丅
丂
俙俢俆俀俀侽偵偮偄偰偼丆揹埑偼應偭偰撪偺偱晄柧偱偡偑丆
俹倂俵僐儞僩儘乕儔偺儃儕儏乕儉偲抲偒姺偊偰丆
儌乕僞乕偺僐儞僩儘乕儖偱丆敾抐偟偰傑偡偑丆
埨掕偟側偄偲偒偼丆儌乕僞乕偑夞傜側偐偭偨傝丆
夞偭偨傝偱丆偒偪傫偲僐儞僩儘乕儖偑偱偒傞偲偒偼丆
抲偒姺偊慜偺儃儕儏乕儉偱偺僐儞僩儘乕儖偲摨偠掱搙偵僐儞僩儘乕儖偱偒傑偟偨丅
亜嵟弶偵丄儚僀僷偐傜丄揹尮揹埑偺敿暘偑弌椡偝傟傑偣傫偐丠
懡暘丆偙傟丆惓忢偐傕偟傟傑偣傫丅
儅僯儏傾儖偵丆嵟弶偼儚僀僷乕偑丆俇係偺偲偙傠偵偁傞丆偲偺婰弎偑偁偭偨傛偆偵巚偄傑偡丅
弶婜壔偑偆傑偔偄偐側偄偲偺偙偲偱偡偑丆
俹倂俵敪惗仺仺丂儘乕僷僗丂仺仺丂俹俬俠乮俙俢曄姺乯丂仺仺丂俙俢俆俀俀侽
偱偍傗傝偱偟傚偆偐丅
俹倂俵敪惗偲儘乕僷僗傪奜偟偰丆
儃儕儏乕儉乮曅懁俆倁乯傪俹俬俠愙懕偟偰俙俢曄姺偟偰傒偰丆
寢壥傪尒偰偼偳偆偱偟傚偆偐丅
偦傟偲丆偍巊偄偺晹僾儘僌儔儉偼丆俶倧侾俇俈侾偺偱偡偐丅
曄峏偟偰側偗傟偽丆弶婜壔婰弎偑丆main丂偺側偐偵側偄傛偆偱偡偑丒丒丒丒丒丅
亖亖亖亖捛婰偱偡亖亖亖亖
亜GND偵偟偰偁傝傑偡丅丂偙傟埲忋偺曽朄偼偳偆偄偭偨曽朄側偺偱偟傚偆偐丠
堄枴偁傞偺偐偼暘偐傝傑偣傫偑丆CS抂巕傕僾儖傾僢僾偱PIC偵偮側偄偱丆
AD俆俀俀侽偺弶婜壔偺慜偵丆
丂RB俀=侽;乮CS傪偮側偄偱偁傞PIC抂巕乯
丂__delay_ms乮俆侽侽乯丟
丂AD5220_init()丟
偲偐傗偭偨傜偳偆側偺偐側偲巚偄傑偟偨丅
丂
mabo 2019/06/24(Mon) 22:47 No.1718 Re: 媈帡壜曄掞峈
 mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅偄偮傕儗僗偁傝偑偲偆偛偞偄傑偡丅
亜偦傟偲丆偍巊偄偺晹僾儘僌儔儉偼丆俶倧侾俇俈侾偺偱偡偐丅
曄峏偟偰側偗傟偽丆弶婜壔婰弎偑丆main丂偺側偐偵側偄傛偆偱偡偑丒丒丒丒丒丅
崱偼丄No1671偼巊偭偰偄傑偣傫丅
慡偔摦嶌偟傑偣傫偱偟偨丅
main偺拞偵丄弶婜壔娭悢傪攝抲偟偰傕僟儊偱偟偨丅
棟桼偼晄柧丄堦墳丄栆媿儘僢僋偝傫偲偺傗傝庢傝偱嶌偭偨撪梕偱偟偨丅
帺暘偱僾儘僌儔儉偼嶌傝捈偟傑偟偨丅
堦墳摦嶌偡傞傛偆偵側傝傑偟偨丅
No1671偲偺嵎偼丄帺暘偺偼丄弶婜壔娭悢傪捛壛偟偨偺偼摉偨傝慜偱偡偑丄
5220偺摦嶌傪廳偔偟偨偲偄偆偺偐丄偔偳偄偺偐傕抦傟傑偣傫丅
丂偨偩丄偒偵偄傜側偄偺偑丄晄埨掕側偲偙傠偑偁傞偺偱偡丅
摦嶌晄埨掕側忬嫷幨恀傪晅偗傑偟偨丅
幨恀塃偼丄5220偺撪晹揹埑偑壓偑偭偨忬懺偱偟偰丄
偙偺曈偺撪晹揹埑偐傜5220傪On偵偡傟偽弶婜壔偑惉岟偟傑偡丅
偨偩丄5220傪Off偵偟偰偐傜偐側傝懸偨側偗傟偽側傝傑偣傫丅
懸偪帪娫傪抁弅偡傞曽朄偑暘偐傟偽偄偄偺偱偡偑丅
丂懸偪帪娫抁弅偵捈愙婑梌偡傞偐偳偆偐傢偐傝傑偣傫偑丄
5220偺揹尮捈嬤偵僆僀儖僐儞傪晅偗傑偟偨丅婥帩偪曄傢偭偨偐側乣掱搙偱偡丅
偦偺懠偵傕偪傚偭偲暼偑偁傝傑偡丅
亜俹倂俵敪惗偲儘乕僷僗傪奜偟偰丆
儃儕儏乕儉乮曅懁俆倁乯傪俹俬俠愙懕偟偰俙俢曄姺偟偰傒偰丆
寢壥傪尒偰偼偳偆偱偟傚偆偐丅
傗偼傝徢忬偼曄傢傝傑偣傫丅
亜堄枴偁傞偺偐偼暘偐傝傑偣傫偑丆CS抂巕傕僾儖傾僢僾偱PIC偵偮側偄偱丆
AD俆俀俀侽偺弶婜壔偺慜偵丆
丂RB俀=侽;乮CS傪偮側偄偱偁傞PIC抂巕乯
丂__delay_ms乮俆侽侽乯丟
丂AD5220_init()丟
偲偐傗偭偨傜偳偆側偺偐側偲巚偄傑偟偨丅
堦墳丄傗偭偰偄傑偡丅偦傟傕丄慜婰僾儘僌儔儉偲偺崌傢偣媄偱
5220偺CS抂巕傪GND偵宷偄偱傕偄傑偡丅
偱傕丄5220偼ON/O倖倖偺孞傝曉偟偵偼懳墳偱偒傑偣傫丅
幚嵺偺僼儔僀僗嶌嬈偵巊偆傢偗偱偡偑丄5220偼SS傗SEC婎斅偲摨偠揹尮偵偡傞偺偱丄
偙偆偄偭偨On/Off偺楢懕憖嶌偼側偄偲巚偆偺偱丄傕偆傗傔偰丄師偺抜奒偵恑傕偆偐偲巚偄偭偰偄傑偡丅
偁傟丂5220屘忈偐側丄僾儘僌儔儉戝忎晇偐傕丅
TR 2019/06/25(Tue) 07:29 No.1719 Re: 媈帡壜曄掞峈
 mabo偝傫丄偙傫偵偪偼丅
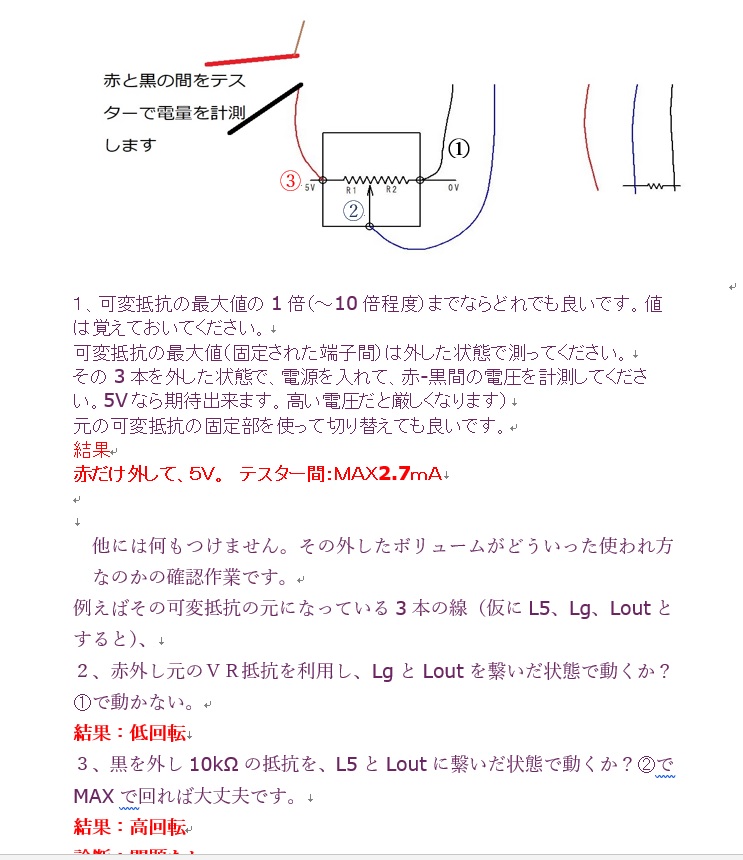
mabo偝傫丄偙傫偵偪偼丅愭掱丄ML4偺壜曄掞峈婍偺巊傢傟曽傪挷傋傑偟偨丅
幨恀偺捠傝偱偡丅
VR偼揹埑惂屼偺巊傢傟曽偱偟偨丅
揹尮揹埑俆V傪嘆偲嘇娫偺掞峈偵傛偭偰揹埑傪暘埑偟惂屼偟偰偄傞偲巚偄傑偡丅
屻偼丄5220傪巊偭偰丄僶儔僢僋偱偺僥僗僩偱偡丅
堦墳丄ML4乣嘊偺揹棳傕挷傋傑偟偨偑丄MAX偱2.7倣A偱偟偨丅
愒偩偗奜偟偰丄揹埑傕妋擣偟傑偟偨丅俆V偱偡丅
屻丄婛懚偺壜曄掞峈偱偡偑丄搶嫗僐僗儌僗惢
宆斣偑丄RV24YN 20S B502 127C
偐傜偡傞偲5倠偺B僇乕僽偱偡丅
嘊偲嘆傪杮懱偐傜奜偟丄嘇傪偦偺傑傑偵偟偰丄掞峈抣傪寁應偟偨傜5.3倠偱偟偨丅
徟偭偰傕椙偄帠偼側偄偺偱丄崱擔偼丄偙傟偱嶌嬈偼拞巭偟偰丄5220傪楳偭偰偄傑偡丅
攝慄恾側傫偐傕僠僃僢僋偟傑偡丅
偮偄偱偱偡傒傑偣傫丅
僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
偍婅偄偟傑偡丅
TR 2019/06/25(Tue) 10:52 No.1720 Re: 媈帡壜曄掞峈
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
亜僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
亜幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
亜幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
亜偍婅偄偟傑偡丅
偙偺晹暘偼丆儅僋儘偱丆師偺傛偆偵側偭偰傞傛偆偱偡丅
#define __delay_us(x) _delay((unsigned long)((x)*(_XTAL_FREQ/4000000.0)))
us偺応崌丆僾儘僌儔儉偺朻摢偱巜掕偟偨丆
丂#define丂8000000
偺僋儘僢僋悢傪4000000偱妱偭偰丆delay乮丂乯傪嶌偭偰傞傛偆偱偡丅
傛偔暘偐傜側偄偺偱偡偑丆傕偭偲丆惓妋偵偡傞偵偼丆
奜晹偺僆僔儗乕僞乕巊偭偨傝丆妱傝崬傒巊偭偨傝偡傞傫偱偟傚偆偐偹丅
偦傟偐傜丆No1671丂摦偐側偐偭偨偲偄偆偙偲偱丆僾儘僌儔儉
尒偰傒傑偟偨丅
嫟捠偺晹暘偱傕偁傞傫偱偡傛偹丅
傕偟偐偟偰丆巚偄堘偄偑擖偭偰傞偐傕偟傟側偄婥偑偟傑偡丅
while (1) {
丂丂static unsigned int adc[32] = {0};
丂丂static char num = 0;
丂丂unsigned int target = 0;
丂丂adc[(++num)&31] = adconv(); // 傾僫儘僌抣偺曄姺娭悢屇傃弌偟偲攝楍偵傛傝AD曄姺抣傪暯弨壔
丂丂for (char i = 0; i < 32; i++)target += adc[i];
丂丂丂丂target = target >> 8;
丂丂if (target > AD5220_val) {
丂丂丂丂AD5220_up();
丂丂} else if (target < AD5220_val) {
丂丂AD5220_down(); //U/Ddown娭悢屇傃弌偟
}
偙偺晹暘偱偡偑丆俁俀屄暘偺攝楍傪梡堄偟偰丆
丂丂丂adc[0]乣adc[31]
偺偦傟偧傟偵ADC偱曄姺偟偨抣傪撉傒崬傓偙偲偵側偭偰傑偡丅
偨偩丆儖乕僾偺拞偺愭摢偱丆枅夞丆adc[ ]丆num 丆傪侽偱弶婜壔偟偰傑偡丅
偦偺屻偱丆
丂adc[(++num)&31] = adconv();
傪偟偰傑偡偺偱丆(++num)&31丂偺晹暘偼丆丂枅夞丂侾丂偵側偭偰偟傑偆偺偱偼偲巚偄傑偡丅
偲側傞偲丆枅夞撉傒庢偭偨抣偑丆adc[1]偵曐懚偝傟傞偙偲偵側傝丆
偦偺傎偐偺adc[*]乮adc[0],adc[2],.......adc[30],adc[31],乯偼丆
弶婜壔偟偨丆侽丂偵側傞偲巚偄傑偡丅
偦傟偱丆惓偟偔俁俀夞暘偺暯嬒偵側傜側偄傛偆側婥偑偟傑偡丅
師偺傛偆偵偡傟偽丆俁俀夞暘偺僨乕僞偺暯嬒偵側傞偺偐側偲巚偄傑偡丅
=========
丂丂static unsigned int adc[32] = {0};//while暘偺奜偱弶婜壔
丂丂static char num = 0;//while暘偺奜偱弶婜壔
while (1) {
丂丂target = 0;
丂丂if(num==32){
丂丂丂丠adc[32] = {0};
丂丂丂num = 0;丂丂丂
丂丂}
丂丂adc[num++] = adconv(); // 傾僫儘僌抣偺曄姺娭悢屇傃弌偟偲攝楍偵傛傝AD曄姺抣傪暯弨壔
丂丂for (char i = 0; i < 32; i++)target += adc[i];
丂丂丂丂target = target >> 8;
丂丂if (target > AD5220_val) {
丂丂丂丂AD5220_up();
丂丂} else if (target < AD5220_val) {
丂丂AD5220_down(); //U/Ddown娭悢屇傃弌偟
}
========
if(num==32)丂偺拞偵丆
丂丂adc[32] = {0};
傪擖傟傞偲丆枅夞丆俁俀夞偛偲偵丆傑偭偝傜側忬懺偱丆
暯嬒傪庢傞偙偲偵側傞偲巚偄傑偡丅
偙傟傪擖傟側偄偲丆堦斣屆偄僨乕僞偺堦偮偲丆堦斣怴偟偄僨乕僞乕偺堦偮傪擖傟懼偊偰丆
忢偵丆暯嬒傪弌偡偙偲偵側傞偲巚偄傑偡丅
偳偪傜偑偄偄偺偐暘偐傝傑偣傫偑丆
屄恖揑偵偼丆堦斣屆偄僨乕僞乕偲丆堦斣怴偟偄僨乕僞乕傪擖傟懼偊偰寁嶼偡傞偺偑丆偄偄偺偐側丆偲巚偄傑偡丅
傑偩丆妋擣偟偰傑偣傫偑丆妋偐傔偰傒偨偄偲巚偄傑偡丅
丂
亜僾儘僌儔儉偱傛偔丄__delay_ms(500);偙偺傛偆偵彂偒傑偡偑丄
亜幚嵺偲偼偢傟偰偄傞姶偠偑偟傑偡丅
亜幚姶偲摨偠帪娫偵偡傞偵偼丄偳偆偄偭偨寁嶼傪偡傞偺偱偟傚偆偐丠
亜偍婅偄偟傑偡丅
偙偺晹暘偼丆儅僋儘偱丆師偺傛偆偵側偭偰傞傛偆偱偡丅
#define __delay_us(x) _delay((unsigned long)((x)*(_XTAL_FREQ/4000000.0)))
us偺応崌丆僾儘僌儔儉偺朻摢偱巜掕偟偨丆
丂#define丂8000000
偺僋儘僢僋悢傪4000000偱妱偭偰丆delay乮丂乯傪嶌偭偰傞傛偆偱偡丅
傛偔暘偐傜側偄偺偱偡偑丆傕偭偲丆惓妋偵偡傞偵偼丆
奜晹偺僆僔儗乕僞乕巊偭偨傝丆妱傝崬傒巊偭偨傝偡傞傫偱偟傚偆偐偹丅
偦傟偐傜丆No1671丂摦偐側偐偭偨偲偄偆偙偲偱丆僾儘僌儔儉
尒偰傒傑偟偨丅
嫟捠偺晹暘偱傕偁傞傫偱偡傛偹丅
傕偟偐偟偰丆巚偄堘偄偑擖偭偰傞偐傕偟傟側偄婥偑偟傑偡丅
while (1) {
丂丂static unsigned int adc[32] = {0};
丂丂static char num = 0;
丂丂unsigned int target = 0;
丂丂adc[(++num)&31] = adconv(); // 傾僫儘僌抣偺曄姺娭悢屇傃弌偟偲攝楍偵傛傝AD曄姺抣傪暯弨壔
丂丂for (char i = 0; i < 32; i++)target += adc[i];
丂丂丂丂target = target >> 8;
丂丂if (target > AD5220_val) {
丂丂丂丂AD5220_up();
丂丂} else if (target < AD5220_val) {
丂丂AD5220_down(); //U/Ddown娭悢屇傃弌偟
}
偙偺晹暘偱偡偑丆俁俀屄暘偺攝楍傪梡堄偟偰丆
丂丂丂adc[0]乣adc[31]
偺偦傟偧傟偵ADC偱曄姺偟偨抣傪撉傒崬傓偙偲偵側偭偰傑偡丅
偨偩丆儖乕僾偺拞偺愭摢偱丆枅夞丆adc[ ]丆num 丆傪侽偱弶婜壔偟偰傑偡丅
偦偺屻偱丆
丂adc[(++num)&31] = adconv();
傪偟偰傑偡偺偱丆(++num)&31丂偺晹暘偼丆丂枅夞丂侾丂偵側偭偰偟傑偆偺偱偼偲巚偄傑偡丅
偲側傞偲丆枅夞撉傒庢偭偨抣偑丆adc[1]偵曐懚偝傟傞偙偲偵側傝丆
偦偺傎偐偺adc[*]乮adc[0],adc[2],.......adc[30],adc[31],乯偼丆
弶婜壔偟偨丆侽丂偵側傞偲巚偄傑偡丅
偦傟偱丆惓偟偔俁俀夞暘偺暯嬒偵側傜側偄傛偆側婥偑偟傑偡丅
師偺傛偆偵偡傟偽丆俁俀夞暘偺僨乕僞偺暯嬒偵側傞偺偐側偲巚偄傑偡丅
=========
丂丂static unsigned int adc[32] = {0};//while暘偺奜偱弶婜壔
丂丂static char num = 0;//while暘偺奜偱弶婜壔
while (1) {
丂丂target = 0;
丂丂if(num==32){
丂丂丂丠adc[32] = {0};
丂丂丂num = 0;丂丂丂
丂丂}
丂丂adc[num++] = adconv(); // 傾僫儘僌抣偺曄姺娭悢屇傃弌偟偲攝楍偵傛傝AD曄姺抣傪暯弨壔
丂丂for (char i = 0; i < 32; i++)target += adc[i];
丂丂丂丂target = target >> 8;
丂丂if (target > AD5220_val) {
丂丂丂丂AD5220_up();
丂丂} else if (target < AD5220_val) {
丂丂AD5220_down(); //U/Ddown娭悢屇傃弌偟
}
========
if(num==32)丂偺拞偵丆
丂丂adc[32] = {0};
傪擖傟傞偲丆枅夞丆俁俀夞偛偲偵丆傑偭偝傜側忬懺偱丆
暯嬒傪庢傞偙偲偵側傞偲巚偄傑偡丅
偙傟傪擖傟側偄偲丆堦斣屆偄僨乕僞偺堦偮偲丆堦斣怴偟偄僨乕僞乕偺堦偮傪擖傟懼偊偰丆
忢偵丆暯嬒傪弌偡偙偲偵側傞偲巚偄傑偡丅
偳偪傜偑偄偄偺偐暘偐傝傑偣傫偑丆
屄恖揑偵偼丆堦斣屆偄僨乕僞乕偲丆堦斣怴偟偄僨乕僞乕傪擖傟懼偊偰寁嶼偡傞偺偑丆偄偄偺偐側丆偲巚偄傑偡丅
傑偩丆妋擣偟偰傑偣傫偑丆妋偐傔偰傒偨偄偲巚偄傑偡丅
丂
mabo 2019/06/25(Tue) 21:31 No.1721 Re: 媈帡壜曄掞峈
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
帺暘暦偒曽偑埆偐偭偨偐傕偟傟側偄偺偱丄暦偒捈偟傑偡丅
5220嬱摦僾儘僌儔儉傪捠偠偰丄delay娭悢偱婥晅偒偑偁傝傑偟偨丅
椺偱偼丄
mabo偝傫偺丄弶婜壔娭悢撪偵婰嵹偟偰偄傞
__delay_ms(500);
__delay_ms(500);
偙偺2峴偱偡丅
倣倱500偼丄巹偺姶妎偱偼丄0.5昩偱偡傛偹丅堦屇媧憡摉側姶偠乮徫偄
偱丄
delay500偑2峴側偺偱丄1昩宱夁偟偰偐傜丄弶婜壔偲側傞丅
弶婜壔偺條巕傪僥僗僞乕偱娤嶡偡傞偲丄條巕偑暘偐傝傑偟偨丅
尒偰偄傞偲丄1昩傛傝偢偄傇傫宱夁偟偨屻偵弶婜壔偟偰偄傞姶偠偱偟偨丅
偦偙偱丄帺暘偺愝掕曽朄偑埆偄偺偱偼偲丄媈栤傪帩偪傑偟偨丅
偦偙偱丄mabo偝傫偵偍暦偒偟傑偟偨丅
埲壓偺捠傝峫偊偰偄傑偟偨丅娫堘偭偰偄傑偡偐丠
帺暘偺応崌偺愝掕曽朄
丒#pragma config FOSC = INTOSC 偱撪晹僋儘僢僋傪巊梡偡傞丅
丒#define _XTAL_FREQ 16000000丂偙偙偱丄儅僀僐儞偺摦嶌懍搙傪僋儘僢僋傪16枩Hz偲愝掕
屻偼丄delay娭悢傪巊偊偽丄乮乯撪偵巜掕偡傞悢抣乮帪娫乯傪巭傔傞偙偲偑偱偒傞偲巚偭偰偄傑偟偨
丅
椺
__delay_ms(500);丂仼0.5昩懸偮
攝楍娭悢偺曽偼丄帺暘傕嵞峫偟偰傒傑偡丅側傫偐丄僥僗僞乕偺摦偒偑埆偄姶偠偱偡丅
偁乣丄崱擔偼ML4偱僥僗僩偲偄偆抜庢傝嵪傒偱偟偨偑丄
棳傟傑偡偹丅
>偦傟偐傜丆No1671丂摦偐側偐偭偨偲偄偆偙偲偱丆僾儘僌儔儉
尒偰傒傑偟偨丅
帺暘偺5220屘忈偟偰偄傞偐傕丅偦偺惉壥傕丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
捛婰
mabo偝傫偙傫偵偪偼丅
亜adc[(++num)&31] = adconv();
偙傟偺撪丄仌俁侾偼丄10恑悢偱11111
仌偑偁傞偐傜0倐11111偲撉傒懼偊傜傟傞傛偆偱偡偹丠
儖乕僾偺1弰栚偱偄偆偲
adc[0]&0b11111偱儅僗僋張棟偝傟偰丄adc[1]偲側傞偺偐側丅
[]撪偼丄悢帤側傫偱偡偹丄暘偐傝偢傜偄両
帺暘暦偒曽偑埆偐偭偨偐傕偟傟側偄偺偱丄暦偒捈偟傑偡丅
5220嬱摦僾儘僌儔儉傪捠偠偰丄delay娭悢偱婥晅偒偑偁傝傑偟偨丅
椺偱偼丄
mabo偝傫偺丄弶婜壔娭悢撪偵婰嵹偟偰偄傞
__delay_ms(500);
__delay_ms(500);
偙偺2峴偱偡丅
倣倱500偼丄巹偺姶妎偱偼丄0.5昩偱偡傛偹丅堦屇媧憡摉側姶偠乮徫偄
偱丄
delay500偑2峴側偺偱丄1昩宱夁偟偰偐傜丄弶婜壔偲側傞丅
弶婜壔偺條巕傪僥僗僞乕偱娤嶡偡傞偲丄條巕偑暘偐傝傑偟偨丅
尒偰偄傞偲丄1昩傛傝偢偄傇傫宱夁偟偨屻偵弶婜壔偟偰偄傞姶偠偱偟偨丅
偦偙偱丄帺暘偺愝掕曽朄偑埆偄偺偱偼偲丄媈栤傪帩偪傑偟偨丅
偦偙偱丄mabo偝傫偵偍暦偒偟傑偟偨丅
埲壓偺捠傝峫偊偰偄傑偟偨丅娫堘偭偰偄傑偡偐丠
帺暘偺応崌偺愝掕曽朄
丒#pragma config FOSC = INTOSC 偱撪晹僋儘僢僋傪巊梡偡傞丅
丒#define _XTAL_FREQ 16000000丂偙偙偱丄儅僀僐儞偺摦嶌懍搙傪僋儘僢僋傪16枩Hz偲愝掕
屻偼丄delay娭悢傪巊偊偽丄乮乯撪偵巜掕偡傞悢抣乮帪娫乯傪巭傔傞偙偲偑偱偒傞偲巚偭偰偄傑偟偨
丅
椺
__delay_ms(500);丂仼0.5昩懸偮
攝楍娭悢偺曽偼丄帺暘傕嵞峫偟偰傒傑偡丅側傫偐丄僥僗僞乕偺摦偒偑埆偄姶偠偱偡丅
偁乣丄崱擔偼ML4偱僥僗僩偲偄偆抜庢傝嵪傒偱偟偨偑丄
棳傟傑偡偹丅
>偦傟偐傜丆No1671丂摦偐側偐偭偨偲偄偆偙偲偱丆僾儘僌儔儉
尒偰傒傑偟偨丅
帺暘偺5220屘忈偟偰偄傞偐傕丅偦偺惉壥傕丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
捛婰
mabo偝傫偙傫偵偪偼丅
亜adc[(++num)&31] = adconv();
偙傟偺撪丄仌俁侾偼丄10恑悢偱11111
仌偑偁傞偐傜0倐11111偲撉傒懼偊傜傟傞傛偆偱偡偹丠
儖乕僾偺1弰栚偱偄偆偲
adc[0]&0b11111偱儅僗僋張棟偝傟偰丄adc[1]偲側傞偺偐側丅
[]撪偼丄悢帤側傫偱偡偹丄暘偐傝偢傜偄両
TR 2019/06/26(Wed) 06:51 No.1722 Re: 媈帡壜曄掞峈
> TR偝傫
岦偙偆偵傕彂偒傑偟偨偗偳丄
OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
偑堘偄傑偡丅偙傟偱偼PIC偑摦偒傑偣傫丅
仸娫堘偄偺擖偭偰偄傞尦儗僗傕廋惓偟偰偍偄偨曽偑椙偄偱偡丅
僐僺儁偟偰巊偆壜擻惈傕偁傝傑偡偐傜丅
捛婰偟偰偍偒傑偡丅
壓偺曽偺僾儘僌儔儉偺婔偮偐偼
#define _XTAL_FREQ
偲幚廃攇悢晹暘偑彂偐傟偰偄傑偣傫丅
婎杮揑偵MABO偝傫偲摨偠廃攇悢乮僾儘僌儔儉慜敿晹乯偵偟偨曽偑椙偄偲巚偄傑偡丅
岦偙偆偵傕彂偒傑偟偨偗偳丄
OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
偑堘偄傑偡丅偙傟偱偼PIC偑摦偒傑偣傫丅
仸娫堘偄偺擖偭偰偄傞尦儗僗傕廋惓偟偰偍偄偨曽偑椙偄偱偡丅
僐僺儁偟偰巊偆壜擻惈傕偁傝傑偡偐傜丅
捛婰偟偰偍偒傑偡丅
壓偺曽偺僾儘僌儔儉偺婔偮偐偼
#define _XTAL_FREQ
偲幚廃攇悢晹暘偑彂偐傟偰偄傑偣傫丅
婎杮揑偵MABO偝傫偲摨偠廃攇悢乮僾儘僌儔儉慜敿晹乯偵偟偨曽偑椙偄偲巚偄傑偡丅
栆媿儘僢僋 2019/06/26(Wed) 07:38 No.1723 Re: 媈帡壜曄掞峈
mabo偝傫丄懕偗偰幐楃偟傑偡丅
栤戣偺偲偙傠偱偡偑埲壓偺傛偆偵偟傑偟偨丅
摦嶌偟偰偄傑偡丅
壓偺曽偵偁傞__delay_ms(1);偼丄僒儞僾儕儞僌娫妘偱偡丅
栆媿儘僢僋偝傫偵尵傢傟偰偄傑偟偨丅
PWM婎杮廃攇悢偲娭學偡傞偦偆偱偡丅
儚僀僷乣Rl娫偺揹埑傪尒偰偄傞偲柺敀偄偱偡丅
Sw ON偱栺250倣倴丄VR栚堦攖奐偗偰丄偦偺屻丄栚堦攖暵傔傞偲130倣倴偵側傝傑偡丅
弶婜壔傛傝丄僟僂儞娭悢偺曽偑丄儚僀僷堦偑壓偑偭偰偄傞傛偆偵姶偠傑偡丅
摦嶌偟偰偔傞偲柺敀偔側偭偰偒傑偡丅
AD5220傪2屄捛壛偟傑偟偨丅
丂丂丂婰
while (1) {
static unsigned int adc[64] = {0};
static char num = 0;
unsigned int target = 0;
for (char i = 0; i < 64; i++)adc[i] = adconv();仺丂攝楍偑adc[0]乣偵偟偨偮傕傝
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
AD5220_down(); //down娭悢屇傃弌偟
}
__delay_ms(1);
}
捛婰
尰嵼PIC(PWM敪惗乯偺怣崋傪傕偲偵5220傪嬱摦偡傞僥僗僩抜奒偵擖傝傑偟偨丅
寢壥丄僐儞僨儞僒偼20兪F丄75兌偑椙偄姶偠偱偡丅
偦傟偲丄5220嬱摦僾儘僌儔儉偺撪丄
僒儞僾儕儞僌娫妘偼丄PWH婎杮廃攇悢244Hz偱傗偭偰偄傑偡偑丄
__delay_us(244)偑椙偄姶偠偱偡丅
栤戣偺偲偙傠偱偡偑埲壓偺傛偆偵偟傑偟偨丅
摦嶌偟偰偄傑偡丅
壓偺曽偵偁傞__delay_ms(1);偼丄僒儞僾儕儞僌娫妘偱偡丅
栆媿儘僢僋偝傫偵尵傢傟偰偄傑偟偨丅
PWM婎杮廃攇悢偲娭學偡傞偦偆偱偡丅
儚僀僷乣Rl娫偺揹埑傪尒偰偄傞偲柺敀偄偱偡丅
Sw ON偱栺250倣倴丄VR栚堦攖奐偗偰丄偦偺屻丄栚堦攖暵傔傞偲130倣倴偵側傝傑偡丅
弶婜壔傛傝丄僟僂儞娭悢偺曽偑丄儚僀僷堦偑壓偑偭偰偄傞傛偆偵姶偠傑偡丅
摦嶌偟偰偔傞偲柺敀偔側偭偰偒傑偡丅
AD5220傪2屄捛壛偟傑偟偨丅
丂丂丂婰
while (1) {
static unsigned int adc[64] = {0};
static char num = 0;
unsigned int target = 0;
for (char i = 0; i < 64; i++)adc[i] = adconv();仺丂攝楍偑adc[0]乣偵偟偨偮傕傝
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
AD5220_down(); //down娭悢屇傃弌偟
}
__delay_ms(1);
}
捛婰
尰嵼PIC(PWM敪惗乯偺怣崋傪傕偲偵5220傪嬱摦偡傞僥僗僩抜奒偵擖傝傑偟偨丅
寢壥丄僐儞僨儞僒偼20兪F丄75兌偑椙偄姶偠偱偡丅
偦傟偲丄5220嬱摦僾儘僌儔儉偺撪丄
僒儞僾儕儞僌娫妘偼丄PWH婎杮廃攇悢244Hz偱傗偭偰偄傑偡偑丄
__delay_us(244)偑椙偄姶偠偱偡丅
TR 2019/06/26(Wed) 16:53 No.1724 Re: 媈帡壜曄掞峈
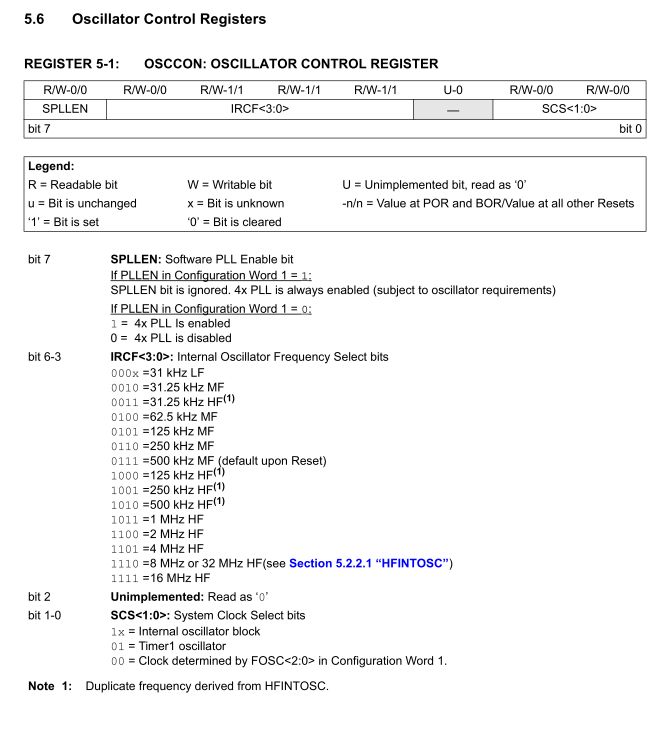
 > MABO偝傫
> MABO偝傫揧晅恾偼AD5220偺擔杮岅僨乕僞僔乕僩P8偵婰嵹偝傟偰偄傞傕偺偱偡丅
偙偙偱偼丄
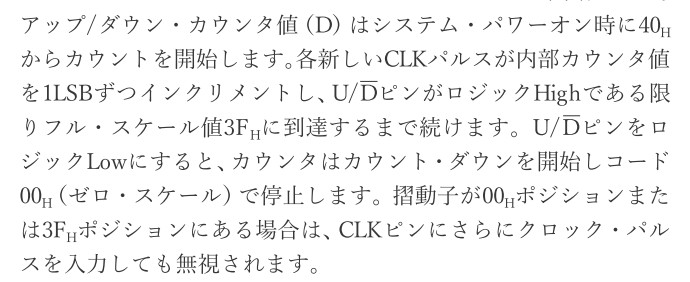
丒僷儚乕僆儞帪偵40H乮亖64乯偐傜僇僂儞僩傪奐巒偡傞丅
丒僋儘僢僋傪擖傟傞偲1LSB(嵟彫扨埵)偢偮僀儞僋儕儊儞僩偡傞丅
丒UD僺儞偑HIGH側傜僼儖僗働乕儖抣3FH乮63乯傑偱摦偒丄LOW側傜
丂00H乮僛儘丒僗働乕儖乯傑偱摦偒丄偳偪傜傕偦傟埲忋偺僋儘僢僋偼柍帇偝傟傞丅
偲彂偄偰偁傝傑偡丅
巹偼丄乽3FH乿偑7FH乮127乯偺岆怉丠側偺偩傠偆偲巚偭偰偄偨偺偱偡偗偳丄
偦偆偱偼側偔丄峫偊曽偑娫堘偭偰偄傞偺偐傕偟傟傑偣傫丅
偄傗丄偦偺揰偼岆怉側偺偐傕偟傟傑偣傫偗偳丄嵟戝抣偲偄偆偐丄億僕僔儑儞偼偙偙偱丄
7FH偩偲巚偭偰偄偨偺偱偡偗偳丄杮摉偼80H乮128乯傑偱偁偭偰丄129億僕僔儑儞側偺偐傕偟傟傑偣傫丅
仸X9C偺曽偼掞峈偑99偁偭偰丄100億僕僔儑儞偲側偭偰偄傞偺偱娫堘偄偼側偄偲巚偄傑偡丅
偮偄偱偵尵偊偽丄1儁乕僕偵偁傞丄
乽恾2b丏僼儖丒僗働乕儖丒傾僢僾/僟僂儞丒僇僂儞僩乿偲偄偆僞僀僩儖偺攇宍恾偱偡偗偳丄
僞僀僩儖偐傜偡傟偽丄堦斣忋偐傜堦斣壓傑偱堏摦偝偣偰偄傞丄偲偄偆傛偆偵撉傔傑偡偗偳丄
偦偺恾拞偺昞婰偼乽COUNT 00H仺3FH仺00H乿偮傑傝丄0仺63仺0側傫偱偡傛偹丅
偙偺偁偨傝傕丠丠丠偱偡丅
偦偺嵍偵栚傪岦偗傞偲
乽乮椺偊偽丄R STEP 亖10 k兌/128亖78 W乯乿偲側偭偰偄傑偡丅
偙傟傕丄乽78兌乿傕偟偔偼乽78兌/W乮儚僀僷乕乯乿偩偲巚偆偺偱偡偗偳丄扨埵偼偲傕偐偔丄
寁嶼幃偵娭偟偰偼僨乕僞僔乕僩忋偱偼128掞峈偁傞傛偆偵彂偄偰偁傞傛偆偱偡丅
傇偭偪傖偗丄摦嶌偟側偄偺側傜丄偁傑傝僨乕僞僔乕僩乮偺悢抣乯傕摉偰偵側傜側偄偺偐傕偟傟傑偣傫丅
幚嵺偵帋偟偰傒傞偟偐側偄晹暘傕偁傝偦偆偱偡丅
偁偲拲堄帠崁偱偡偗偳丄儂乕儉儁乕僕偺FAQ偱
Q丗 僨僶僀僗偺揹尮偑off偺帪偵丄W乮儚僀僷乕乯傗A丄B抂巕偵揹埑傪報壛偡傞偙偲偼壜擻偱偡偐丠乮GND偼嫟捠乯
A丗 僗僩儗僗偵傛傝攋夡偡傞婋尟偑偁傝傑偡偺偱丄晄壜偱偡丅
偲側偭偰偄傑偡丅宷偖弴斣偦偟偰丄愗傞弴斣傕峫椂偡傞昁梫偑偁傝傑偡偹丅偳偺掱搙僔價傾側梫審側偺偐偼敾傝傑偣傫偗偳丅
栆媿儘僢僋 2019/06/26(Wed) 17:06 No.1725 Re: 媈帡壜曄掞峈
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
亖亖亖亖亖栆媿儘僢僋偝傫亖亖亖亖亖亖亖
栆媿儘僢僋偝傫丆徻偟偄峫嶡偁傝偑偲偆偛偞偄傑偟偨丅
偙偺曈丆巹丆偩傔側傫偱偡傛偹丅
偁傑傝撉傫偩傝偟側偄偺偱丒丒丒丒丒丒丒丅
曌嫮偵側傝傑偡丅
偦傟偲丆傗偼傝丆ON丂OFF丂偺僔乕働儞僗傗丆
愙懕婡婍偲偺愙懕偺僔乕働儞僗丆摍傑偱丆嵶偐偔専摙偡傞傛偆側傫偱偡偹丅
偄傠偄傠丆柺搢偱偡偹丅
亖亖亖亖俿俼偝傫亖亖亖亖亖
亜帺暘偺応崌偺愝掕曽朄
亜丒#pragma config FOSC = INTOSC 偱撪晹僋儘僢僋傪巊梡偡傞丅
丒#define _XTAL_FREQ 16000000丂偙偙偱丄儅僀僐儞偺摦嶌懍搙傪僋儘僢僋傪16枩Hz偲愝掕
亜屻偼丄delay娭悢傪巊偊偽丄乮乯撪偵巜掕偡傞悢抣乮帪娫乯傪巭傔傞偙偲偑偱偒傞偲巚偭偰偄傑偟偨
栆媿儘僢僋偝傫偑偍偭偟傖偭偰偨傛偆偵丆俷俽俠俠俷俶偺愝掕傕偁傞傛偆偱偡偹丅
偙傟丆偑惓偟偔愝掕偝傟偰側偄偲丆傕偟偐偟偰丆憗偔姶偠偨傝丆抶偔姶偠偨傝偡傞偐傕偱偡偹丅
偦傟偐傜丆捛婰偺
亜亜adc[(++num)&31] = adconv();
偱偡偑丆num丂偑丂俁俀埲忋偵側傜側偄偨傔偺張棟偩偲巚偄傑偡丅
傑偢丆++num丂偱丆num丂偑丂亄侾丂偝傟偰丆
偦偺屻偲丆俁侾偲偺仌偑庢傜傟傞偲棟夝偟傑偟偨丅
num丂偑丂俁俀丂埲忋偵側偭偨帪丆乽仌乿偺張棟偱丆
丂丂侽仺侽
丂丂侾仺侾
丂丂丒
丂丂丒
丂丂俁侾仺俁侾
丂丂俁俀仺侽
丂丂俁俁仺侾
偺傛偆偵側傞偲巚偄傑偡丅
僾儘僌儔儉偺棳傟偱偼丆
num丂偼丂num亖侽丂偱朻摢偵弶婜壔偝傟偰傑偡偺偱丆
++num丂偱侽偵侾偵僾儔僗偝傟偰丆
num丂偵丂侾丂偑擖傝丆丂仌丂偑丂幚巤偝傟傞偲棟夝偟傑偟偨丅
丂
num++丂偩偲丂張棟偑偡傫偩屻偱僾儔僗偝傟傞偺偱丆
乽num偺侽乿偲俁侾偺仌偑庢傜傟偨屻偱丆num偑丂侾丂偵側傞偲棟夝偟偰傑偟偨丅
偙偙丆偪傚偭偲丆偄偮傕晄埨偵側傞偲偙傠偱偡丅
偦傟偱丆彂偔偲偒偼丆偄偮傕丆
丂adc[num丂&丂31] = adconv();
丂丂丂num++;
偐丆
丂丂丂num++;
丂adc[num丂&丂31] = adconv();
傒偨偄偵丆柧帵揑偵彂偄偰傑偡丅
偙偆偟側偄偲棟夝偱偒側偄偺偱丆摢庛偄偺偐側偲巚偭偰傑偡丅乮徫乯
巹偺棟夝丆娫堘偭偰偄傞偐傕偟傟傑偣傫丅
偦傟偐傜丆僾儘僌儔儉偱偡偑丆俇係夞偺僒儞僾儕儞僌偱偡偹丅
for (char i = 0; i < 64; i++)adc[i] = adconv();仺丂攝楍偑adc[0]乣偵偟偨偮傕傝
for (char i = 0; i < 64; i++)target += adc[i];
偙偺晹暘丆
for (char i = 0; i < 64; i++)乷
丂adc[i] = adconv();
丂target += adc[i];
乸
傒偨偄偵丆堦偮偵偡傞偲丆懡暘丆敿暘偺帪娫偱偱偒傑偡丅
偦傟偲丆岲傒偺栤戣側偺偱偡偑丆屻偐傜偺僨僶僢僋偺偟傗偡偝峫偊傞偲丆
乷丂乸
傪徣棯偟側偄偱彂偔曽偑丆巹偼丆岲傒偱偡丅
徣棯偟偰彂偔偲丆屻偱妋偐傔傞偲偒丆斖埻偑濨枂偵側偭偰丆
棟夝偱偒側側偔側偭偰偟傑偟傑偡丅
傗偼傝摢埆偄偱偡丅乮徫乯
亜摦嶌偟偰偔傞偲柺敀偔側偭偰偒傑偡丅
亜AD5220傪2屄捛壛偟傑偟偨丅
埨掕偟偰丆摦嶌偡傞傛偆偵側偭偨傫偱偟傚偆偐丅
偪傚偲丆柧傞偔側偭偰偒傑偟偨偐偹丅
丂丂丂
亖亖亖亖亖栆媿儘僢僋偝傫亖亖亖亖亖亖亖
栆媿儘僢僋偝傫丆徻偟偄峫嶡偁傝偑偲偆偛偞偄傑偟偨丅
偙偺曈丆巹丆偩傔側傫偱偡傛偹丅
偁傑傝撉傫偩傝偟側偄偺偱丒丒丒丒丒丒丒丅
曌嫮偵側傝傑偡丅
偦傟偲丆傗偼傝丆ON丂OFF丂偺僔乕働儞僗傗丆
愙懕婡婍偲偺愙懕偺僔乕働儞僗丆摍傑偱丆嵶偐偔専摙偡傞傛偆側傫偱偡偹丅
偄傠偄傠丆柺搢偱偡偹丅
亖亖亖亖俿俼偝傫亖亖亖亖亖
亜帺暘偺応崌偺愝掕曽朄
亜丒#pragma config FOSC = INTOSC 偱撪晹僋儘僢僋傪巊梡偡傞丅
丒#define _XTAL_FREQ 16000000丂偙偙偱丄儅僀僐儞偺摦嶌懍搙傪僋儘僢僋傪16枩Hz偲愝掕
亜屻偼丄delay娭悢傪巊偊偽丄乮乯撪偵巜掕偡傞悢抣乮帪娫乯傪巭傔傞偙偲偑偱偒傞偲巚偭偰偄傑偟偨
栆媿儘僢僋偝傫偑偍偭偟傖偭偰偨傛偆偵丆俷俽俠俠俷俶偺愝掕傕偁傞傛偆偱偡偹丅
偙傟丆偑惓偟偔愝掕偝傟偰側偄偲丆傕偟偐偟偰丆憗偔姶偠偨傝丆抶偔姶偠偨傝偡傞偐傕偱偡偹丅
偦傟偐傜丆捛婰偺
亜亜adc[(++num)&31] = adconv();
偱偡偑丆num丂偑丂俁俀埲忋偵側傜側偄偨傔偺張棟偩偲巚偄傑偡丅
傑偢丆++num丂偱丆num丂偑丂亄侾丂偝傟偰丆
偦偺屻偲丆俁侾偲偺仌偑庢傜傟傞偲棟夝偟傑偟偨丅
num丂偑丂俁俀丂埲忋偵側偭偨帪丆乽仌乿偺張棟偱丆
丂丂侽仺侽
丂丂侾仺侾
丂丂丒
丂丂丒
丂丂俁侾仺俁侾
丂丂俁俀仺侽
丂丂俁俁仺侾
偺傛偆偵側傞偲巚偄傑偡丅
僾儘僌儔儉偺棳傟偱偼丆
num丂偼丂num亖侽丂偱朻摢偵弶婜壔偝傟偰傑偡偺偱丆
++num丂偱侽偵侾偵僾儔僗偝傟偰丆
num丂偵丂侾丂偑擖傝丆丂仌丂偑丂幚巤偝傟傞偲棟夝偟傑偟偨丅
丂
num++丂偩偲丂張棟偑偡傫偩屻偱僾儔僗偝傟傞偺偱丆
乽num偺侽乿偲俁侾偺仌偑庢傜傟偨屻偱丆num偑丂侾丂偵側傞偲棟夝偟偰傑偟偨丅
偙偙丆偪傚偭偲丆偄偮傕晄埨偵側傞偲偙傠偱偡丅
偦傟偱丆彂偔偲偒偼丆偄偮傕丆
丂adc[num丂&丂31] = adconv();
丂丂丂num++;
偐丆
丂丂丂num++;
丂adc[num丂&丂31] = adconv();
傒偨偄偵丆柧帵揑偵彂偄偰傑偡丅
偙偆偟側偄偲棟夝偱偒側偄偺偱丆摢庛偄偺偐側偲巚偭偰傑偡丅乮徫乯
巹偺棟夝丆娫堘偭偰偄傞偐傕偟傟傑偣傫丅
偦傟偐傜丆僾儘僌儔儉偱偡偑丆俇係夞偺僒儞僾儕儞僌偱偡偹丅
for (char i = 0; i < 64; i++)adc[i] = adconv();仺丂攝楍偑adc[0]乣偵偟偨偮傕傝
for (char i = 0; i < 64; i++)target += adc[i];
偙偺晹暘丆
for (char i = 0; i < 64; i++)乷
丂adc[i] = adconv();
丂target += adc[i];
乸
傒偨偄偵丆堦偮偵偡傞偲丆懡暘丆敿暘偺帪娫偱偱偒傑偡丅
偦傟偲丆岲傒偺栤戣側偺偱偡偑丆屻偐傜偺僨僶僢僋偺偟傗偡偝峫偊傞偲丆
乷丂乸
傪徣棯偟側偄偱彂偔曽偑丆巹偼丆岲傒偱偡丅
徣棯偟偰彂偔偲丆屻偱妋偐傔傞偲偒丆斖埻偑濨枂偵側偭偰丆
棟夝偱偒側側偔側偭偰偟傑偟傑偡丅
傗偼傝摢埆偄偱偡丅乮徫乯
亜摦嶌偟偰偔傞偲柺敀偔側偭偰偒傑偡丅
亜AD5220傪2屄捛壛偟傑偟偨丅
埨掕偟偰丆摦嶌偡傞傛偆偵側偭偨傫偱偟傚偆偐丅
偪傚偲丆柧傞偔側偭偰偒傑偟偨偐偹丅
丂丂丂
mabo 2019/06/26(Wed) 22:00 No.1726 Re: 媈帡壜曄掞峈
mabo偝傫偍偼傛偆偛偞偄傑偡丅
5220偺揹尮偺ON/OFF偺弴斣偼丄摨姶偱偡丅
帺暘傕夁嫀偵丄ON/OFF偺弴斣偁傞側乣偲姶偠偰丄彂偒崬傫偱偁傝傑偡丅
偱傕丄偦偆偄偭偨拲堄揰偼丄帺暘偺夁嫀偺宱尡偱丄暘偐偭偨偙偲偱丄僨僶僀僗偺愢柧彂偵偼側偄偲巚偄傑偟偨丅
亜栆媿儘僢僋偝傫偑偍偭偟傖偭偰偨傛偆偵丆俷俽俠俠俷俶偺愝掕傕偁傞傛偆偱偡偹丅
偦偆偱偟偨偐丄壓婰偺捠傝偱偡偹丄嵟弶壗傪尵偭偰偄傞偺偐暘偐傝傑偣傫偱偟偨丅
崱丄mabo偝傫偵尵傢傟偰丄暘偐傝傑偟偨丄偱傕幚嵺偼丄壗搙傕丄僨乕僞僔乕僩傪尒偰丄妋擣偟偰偄偨偺偱丄
偄偮偺娫偵偐丄捈偭偰偄傑偟偨丅丂偦偆偄偭偨抧枴側愊傒廳偹偱丄崱偼摦嶌偟偰偄傑偡丅
慺恖偵偼丄挌擩偵愢柧偟偰偔傟側偄偲壗傪尵偭偰偄傞偺偐傛偔暘偐傝傑偣傫両両
mabo偝傫丄偄偮傕挌擩側愢柧偵姶幱偟傑偡丅
mabo偝傫偲偺僐儈儏僯働乕僔儑儞偵偼僗僩儗僗偑偁傝傑偣傫両両両両
婥偑崌偄傑偡偹両両両
丂丂丂婰
OSCCON偵偮偄偰
摉丂弶丗OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
曄峏屻丗OSCCON = 0b01110010; //僋儘僢僋廃攇悢傪16MHz偵愝掕
亜num++;
丂adc[num丂&丂31] = adconv();
傒偨偄偵丆柧帵揑偵彂偄偰傑偡丅
偙偆偟側偄偲棟夝偱偒側偄偺偱丆摢庛偄偺偐側偲巚偭偰傑偡丅乮徫乯
偙偺晹暘偱偡偑丄師峴偺傑傑偩偲
師峴
亜亜adc[(++num)&31] = adconv();
懯栚偩偲暘偐傝傑偟偨丅
俁俀偵偟側偄偲懯栚両
偱傕丄
32偵偡傞偲丄32偼2恑悢偱100000丄側偺偱
10000仌32丂
偦傟傕丄仌偑棙偄偰儅僗僋張棟偝傟丄仌0倐11偲摨偠偵側傞偲偐丅
偮傑傝丄00
側偺偱丄
嶌傜傟傞攝楍偺弴斣偼丄
adc[1],adc[2]乣adc[0]偲側傞丄
偱傕丄攝楍偵弴斣偑丄嵟屻偵侽偑棃偰丄adc[0]偵堦斣嵟屻偵僒儞僾儕儞僌偝傟偨抣偑擖傞偺偱丄
僒儞僾儕儞僌偵傛傝暯嬒抣傪弌偡偲偄偆峫偊偲崌偭偰偄傞偺偐丠丠偲巚偄傑偡偑丄
偳偆偐側偭偰姶偠偱偡丅丂偨偩堦掕偟偰偄傞偺偱椙偄傛偆側婥傕偟傑偡丅
mabo偝傫偼丄偳偆巚偄傑偡偐丠丠
僥僗僞乕偺悢抣傪尒偰偄傞偲丄僗儉乕僗偠傖側偄傫偱偡傛丅
僾儘僌儔儉張棟偱偼柍棟側偺偐側丅
偮傑傝丄
僒儞僾儕儞僌傪堦掕娫妘偱丄偲偭偰偄偰偄傞拞丄VR偑曄傢傞偲丄媫绡丄UP/DOWN傪偟丄
偦傟偑廔傢傞偲丄傑偨丄僒儞僾儕儞僌傪偡傞丂偲偄偆棳傟偱偟傚両丠
僥僗僞乕偺悢抣偑妸傜偐偵摦偐側偄偺偼丄偙偆偄偭偨寁嶼張棟偺強堊偐側偭偰巚偄傑偡丅
mabo偝傫傕傗偭偰傒偰偔偩偝偄丅
偦傟偲丄帺暘偺応崌丄崱偺傑傑偠傖丄僐儞僷僀儖偱偒傑偣傫偱偟偨丅
帺暘偑曄偊偨撪梕偼丄壓婰偺偲偍傝偱偡丅
target1偲偟丄target偲暘偗傞偙偲偵傛偭偰丄埨掕偟傑偟偨丅
丂丂丂婰
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;__delay_us(250);//PWM僒儞僾儕儞僌娫妘
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
亜for (char i = 0; i < 64; i++)乷
丂adc[i] = adconv();
丂target += adc[i];
乸
桳擄偆偛偞偄傑偡丅
偙偺曽偑尒傗偡偄偱偡偹丄崱丄偙偺傛偆偵偟傑偟偨丅
偮偄偱偵丄
for暥偵偮偄偰夝庍傪嫵偊偰壓偝偄丅
僉僢僩偱梀傏偆傛傝敳悎丂伀
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
弶婜壔幃偺抣偑曄壔幃偵傛偭偰曄壔偟偨屻丄宲懕忦審幃偑恀側傜偽張棟傪孞傝曉偟幚峴丅
宲懕忦審幃偑婾側傜偽丄張棟偼幚峴偝傟側偄丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
for暥偵棃偨帪丄宲懕忦審幃傪偡傋偰幚巤偟偨屻丄傗偭偲丄for暥傪敳偗傞偙偲偑偱偒傞偺偱偟傚偆偐丠丠丠丠
挿暥偵側傝傑偟偨偑丄偛梕幫婅偄傑偡丅
偱丄
儘乕僷僗偺拲堄揰偑偁傝傑偡丅
10兪偲22倠偩偲丄掞峈偑戝偒偡偓偰丄揹埑偑暘埑偝傟傞搙崌偄偑戝偒偡偓傑偡丅
帺暘偼丄崱偼丄俈俆兌偵偟丄偦偺暘丄僐儞僨儞僒10兪傪2屄暲楍偵偟偰偄傑偡丅暲楍偵傛偭偰丄僐儞僨儞僒梕検偼2攞偵側傞丅
5220偺揹尮偺ON/OFF偺弴斣偼丄摨姶偱偡丅
帺暘傕夁嫀偵丄ON/OFF偺弴斣偁傞側乣偲姶偠偰丄彂偒崬傫偱偁傝傑偡丅
偱傕丄偦偆偄偭偨拲堄揰偼丄帺暘偺夁嫀偺宱尡偱丄暘偐偭偨偙偲偱丄僨僶僀僗偺愢柧彂偵偼側偄偲巚偄傑偟偨丅
亜栆媿儘僢僋偝傫偑偍偭偟傖偭偰偨傛偆偵丆俷俽俠俠俷俶偺愝掕傕偁傞傛偆偱偡偹丅
偦偆偱偟偨偐丄壓婰偺捠傝偱偡偹丄嵟弶壗傪尵偭偰偄傞偺偐暘偐傝傑偣傫偱偟偨丅
崱丄mabo偝傫偵尵傢傟偰丄暘偐傝傑偟偨丄偱傕幚嵺偼丄壗搙傕丄僨乕僞僔乕僩傪尒偰丄妋擣偟偰偄偨偺偱丄
偄偮偺娫偵偐丄捈偭偰偄傑偟偨丅丂偦偆偄偭偨抧枴側愊傒廳偹偱丄崱偼摦嶌偟偰偄傑偡丅
慺恖偵偼丄挌擩偵愢柧偟偰偔傟側偄偲壗傪尵偭偰偄傞偺偐傛偔暘偐傝傑偣傫両両
mabo偝傫丄偄偮傕挌擩側愢柧偵姶幱偟傑偡丅
mabo偝傫偲偺僐儈儏僯働乕僔儑儞偵偼僗僩儗僗偑偁傝傑偣傫両両両両
婥偑崌偄傑偡偹両両両
丂丂丂婰
OSCCON偵偮偄偰
摉丂弶丗OSCCON = 0b0111001; //僋儘僢僋廃攇悢傪16MHz偵愝掕
曄峏屻丗OSCCON = 0b01110010; //僋儘僢僋廃攇悢傪16MHz偵愝掕
亜num++;
丂adc[num丂&丂31] = adconv();
傒偨偄偵丆柧帵揑偵彂偄偰傑偡丅
偙偆偟側偄偲棟夝偱偒側偄偺偱丆摢庛偄偺偐側偲巚偭偰傑偡丅乮徫乯
偙偺晹暘偱偡偑丄師峴偺傑傑偩偲
師峴
亜亜adc[(++num)&31] = adconv();
懯栚偩偲暘偐傝傑偟偨丅
俁俀偵偟側偄偲懯栚両
偱傕丄
32偵偡傞偲丄32偼2恑悢偱100000丄側偺偱
10000仌32丂
偦傟傕丄仌偑棙偄偰儅僗僋張棟偝傟丄仌0倐11偲摨偠偵側傞偲偐丅
偮傑傝丄00
側偺偱丄
嶌傜傟傞攝楍偺弴斣偼丄
adc[1],adc[2]乣adc[0]偲側傞丄
偱傕丄攝楍偵弴斣偑丄嵟屻偵侽偑棃偰丄adc[0]偵堦斣嵟屻偵僒儞僾儕儞僌偝傟偨抣偑擖傞偺偱丄
僒儞僾儕儞僌偵傛傝暯嬒抣傪弌偡偲偄偆峫偊偲崌偭偰偄傞偺偐丠丠偲巚偄傑偡偑丄
偳偆偐側偭偰姶偠偱偡丅丂偨偩堦掕偟偰偄傞偺偱椙偄傛偆側婥傕偟傑偡丅
mabo偝傫偼丄偳偆巚偄傑偡偐丠丠
僥僗僞乕偺悢抣傪尒偰偄傞偲丄僗儉乕僗偠傖側偄傫偱偡傛丅
僾儘僌儔儉張棟偱偼柍棟側偺偐側丅
偮傑傝丄
僒儞僾儕儞僌傪堦掕娫妘偱丄偲偭偰偄偰偄傞拞丄VR偑曄傢傞偲丄媫绡丄UP/DOWN傪偟丄
偦傟偑廔傢傞偲丄傑偨丄僒儞僾儕儞僌傪偡傞丂偲偄偆棳傟偱偟傚両丠
僥僗僞乕偺悢抣偑妸傜偐偵摦偐側偄偺偼丄偙偆偄偭偨寁嶼張棟偺強堊偐側偭偰巚偄傑偡丅
mabo偝傫傕傗偭偰傒偰偔偩偝偄丅
偦傟偲丄帺暘偺応崌丄崱偺傑傑偠傖丄僐儞僷僀儖偱偒傑偣傫偱偟偨丅
帺暘偑曄偊偨撪梕偼丄壓婰偺偲偍傝偱偡丅
target1偲偟丄target偲暘偗傞偙偲偵傛偭偰丄埨掕偟傑偟偨丅
丂丂丂婰
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;__delay_us(250);//PWM僒儞僾儕儞僌娫妘
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
亜for (char i = 0; i < 64; i++)乷
丂adc[i] = adconv();
丂target += adc[i];
乸
桳擄偆偛偞偄傑偡丅
偙偺曽偑尒傗偡偄偱偡偹丄崱丄偙偺傛偆偵偟傑偟偨丅
偮偄偱偵丄
for暥偵偮偄偰夝庍傪嫵偊偰壓偝偄丅
僉僢僩偱梀傏偆傛傝敳悎丂伀
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
弶婜壔幃偺抣偑曄壔幃偵傛偭偰曄壔偟偨屻丄宲懕忦審幃偑恀側傜偽張棟傪孞傝曉偟幚峴丅
宲懕忦審幃偑婾側傜偽丄張棟偼幚峴偝傟側偄丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
for暥偵棃偨帪丄宲懕忦審幃傪偡傋偰幚巤偟偨屻丄傗偭偲丄for暥傪敳偗傞偙偲偑偱偒傞偺偱偟傚偆偐丠丠丠丠
挿暥偵側傝傑偟偨偑丄偛梕幫婅偄傑偡丅
偱丄
儘乕僷僗偺拲堄揰偑偁傝傑偡丅
10兪偲22倠偩偲丄掞峈偑戝偒偡偓偰丄揹埑偑暘埑偝傟傞搙崌偄偑戝偒偡偓傑偡丅
帺暘偼丄崱偼丄俈俆兌偵偟丄偦偺暘丄僐儞僨儞僒10兪傪2屄暲楍偵偟偰偄傑偡丅暲楍偵傛偭偰丄僐儞僨儞僒梕検偼2攞偵側傞丅
TR 2019/06/27(Thu) 06:14 No.1727 懕侾侾乕俹倂俵
俿俼偝傫丆朰傟偰傑偟偨丅
僾儖傾僢僾偟偰傑偟偨偹丅
崱擔偼偱偒側偄偺偱偡偑丆
柧擔丆儌乕僞乕夞偟偰尒傑偡丅
仏仏仏仏捛婰仏仏仏仏
丂栆媿儘僢僋偝傫偍偍偭偟傖傞捠傝偱偟偨丅
丂偨偩丆捈偟偰偟傑偆偲丆偒偭偲丆儚儞僋儘僢僋懡偔側傝傑偡偐偹丅
僾儖傾僢僾偟偰傑偟偨偹丅
崱擔偼偱偒側偄偺偱偡偑丆
柧擔丆儌乕僞乕夞偟偰尒傑偡丅
仏仏仏仏捛婰仏仏仏仏
丂栆媿儘僢僋偝傫偍偍偭偟傖傞捠傝偱偟偨丅
丂偨偩丆捈偟偰偟傑偆偲丆偒偭偲丆儚儞僋儘僢僋懡偔側傝傑偡偐偹丅
mabo 2019/06/16(Sun) 23:17 No.1683
Re: 懕侾侾乕俹倂俵
 偊乕偲丄揧晅恾嵍偑X9C偺傕偺偱偡丅塃偑AD5220偱偡丅
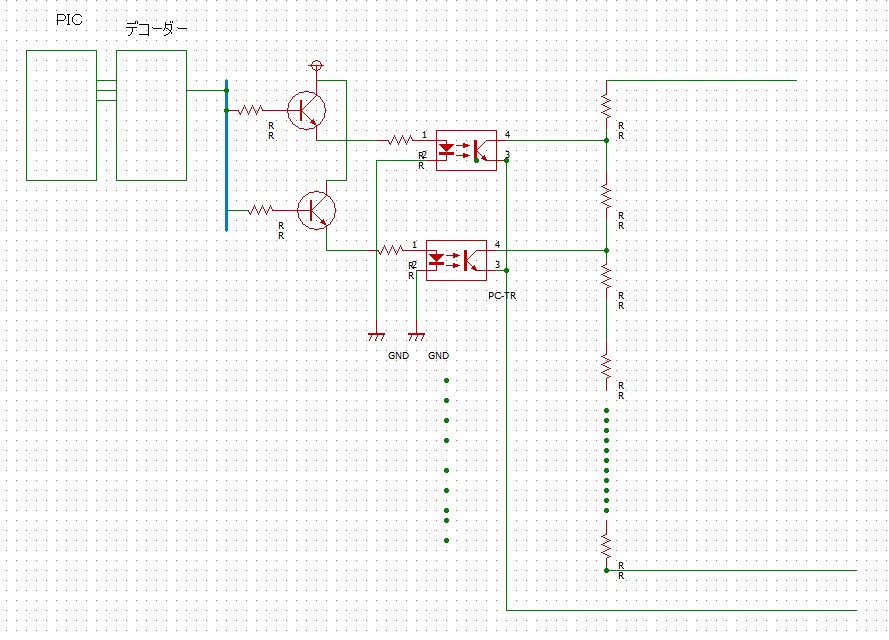
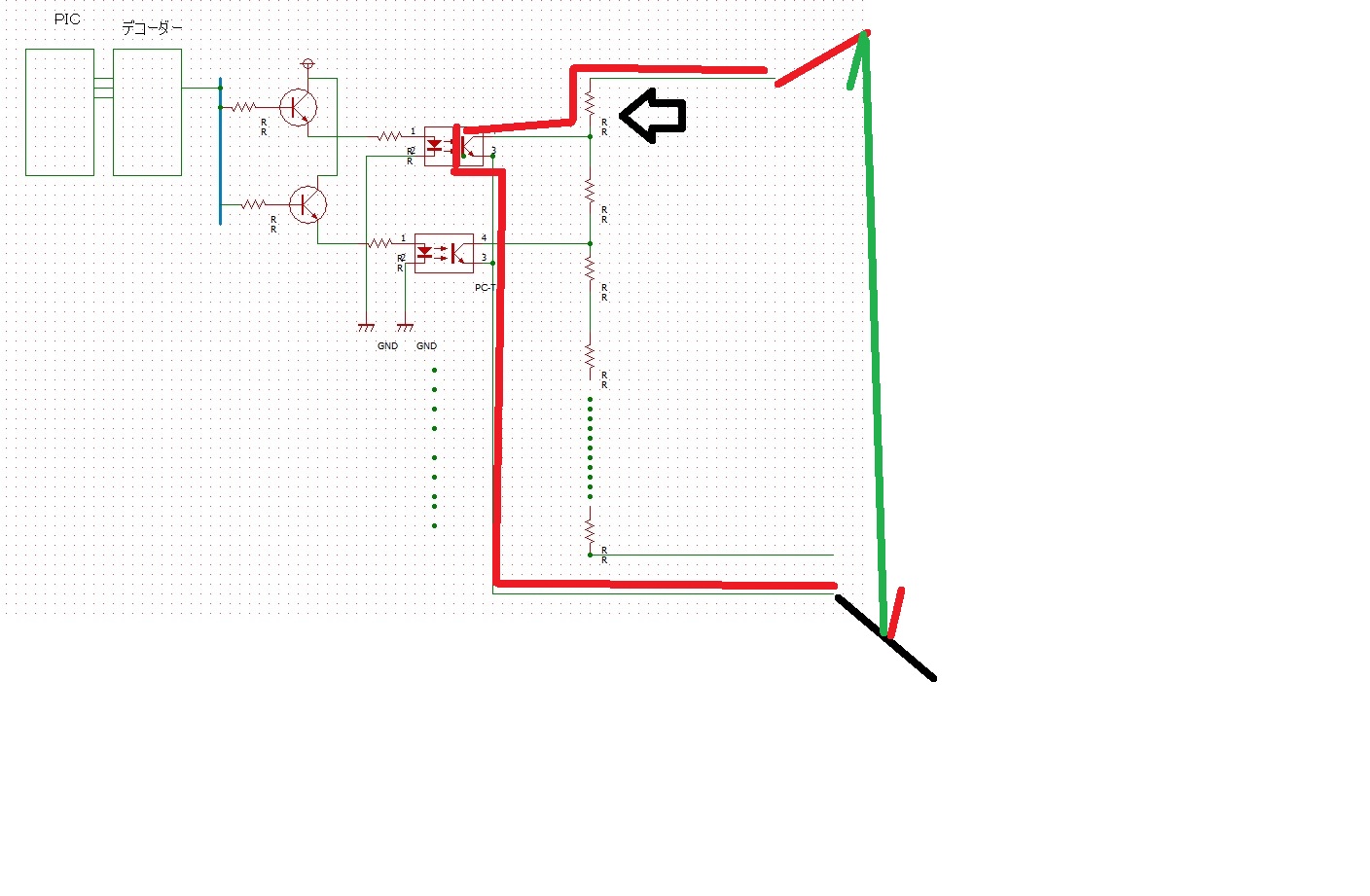
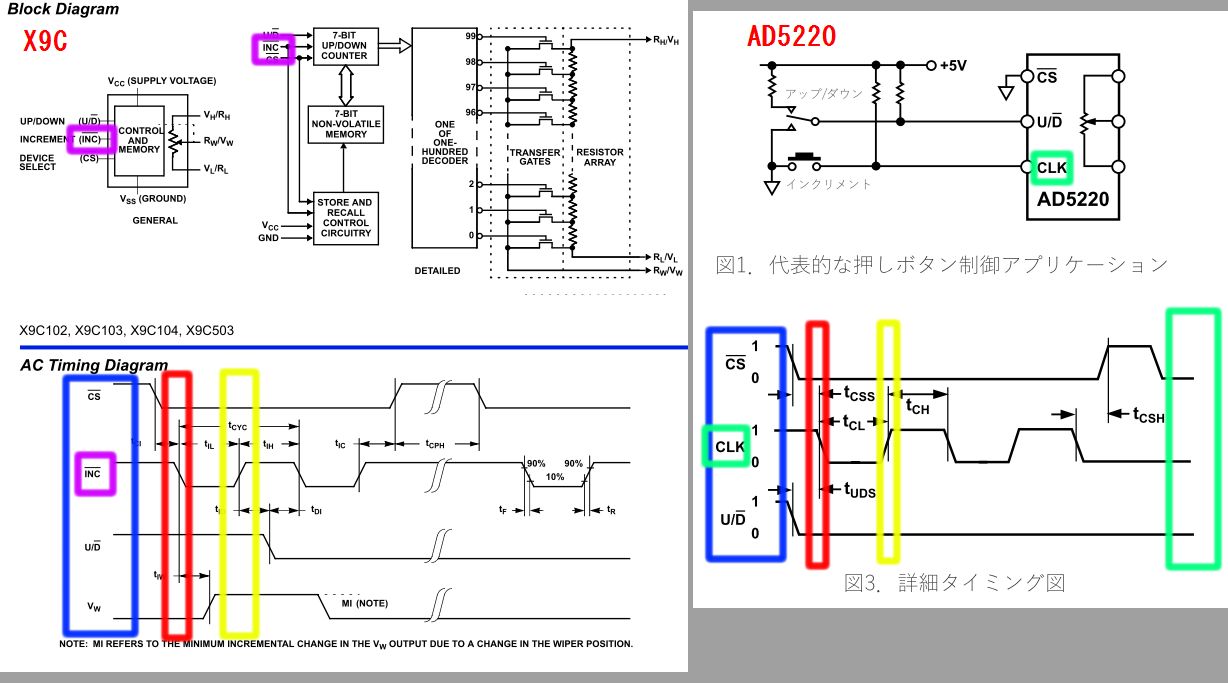
偊乕偲丄揧晅恾嵍偑X9C偺傕偺偱偡丅塃偑AD5220偱偡丅傑偢丄X9C偱偡偗偳丄晛捠丄僾儘僌儔儉傪慻傓嵺偼僞僀儉僠儍乕僩乮偙偙偱偼AC TIMING DIAGRAM乯傪尒傑偡丅
惵慄傪尒傟偽傢偐傞傛偆偵丄INC僺儞偼僲乕儅儖乮憖嶌奜乯偱偼HIGH偵側偭偰偄傑偡丅
師偵CS傪LOW偵偟偰偄傑偡偗偳丄傑偀丄偙偺忬懺偑崱夞偺僲乕儅儖忬懺偵憡摉偟傑偡丅
偦偟偰丄愒慄晹偱丄伀偲側偭偰僗僩儘乕僽偱偡丅墿怓晹偱丄掕埵抲偺HIGH偵栠偟傑偡丅
偙偺傛偆偵傾僀僪儖HIGH偲偡傞傛偆偵彂偐傟偰偄傞偺偱丄偦偺傑傑僾儘僌儔儉偟偨偩偗偱偡丅
仸暿偵乽媡偱偼摦嶌偟側偄乿丄偲尵偭偰偄傞栿偱偼柍偄偱偡傛丅乽曐徹偝傟偰偄側偄乿偲偄偆帠偱偡丅
AD5220偵娭偟偰傕摨偠帠偱丄僞僀儈儞僌恾偱丄尦乆HIGH偵側偭偰偄傑偡丅
偨偩偟丄AD5220偺傎偆偼屻曽偺墿椢慄偺晹暘偱偼CLK僺儞偑LOW偱偡丅偙傟偼晛捠丄乽偳偪傜偱傕峔傢側偄乿偲
偄偆帠傪堄枴偟傑偡丅
偦偟偰丄傕偆堦偮丄僲乕儅儖HIGH傪姶偠偨偺偼偦偺忋偺庤摦偺夞楬恾偱偡丅
傒傟偽傢偐傞傛偆偵丄僾儖傾僢僾亖僲乕儅儖HIGH偱偡丅
傑偀丄偙偪傜偺僨僶僀僗傕巹偺僾儘僌儔儉偑晛捠偱偡丅亖僨乕僞僔乕僩偺傑傑偱偡丅
仸偦偺恾偱暘偐傞傛偆偵AD5220偺曽偼CS傪LOW屌掕偱巊偭偰栤戣柍偄敜偱偡丅
X9C傕偦傟偑尨場偱掞峈抣偑偍偐偟偄丄偲偼巚偭偰偄傑偣傫丅
偱丄側偤丄INC僺儞乮CLK僺儞乯偼暯忢帪偑HIGH偲尵偭偰偄傞偺偵丄LOW弌椡偱弶婜壔偡傞偺偱偟傚偆偐丠
掞峈抣偵偐傫偟偰偼X9C偑亇20亾丄AD5220偑亇30亾側偺偱丄乽8.5倠兌乿傗乽栺俋侽倠兌乿斖埻撪偱偡丅
儚僀僷乕掞峈偵娭偟偰偼偳偆峫偊偰傕偍偐偟偄悢抣偱偡丅
僨乕僞僔乕僩偱偼丄椉幰偲傕偵丄40兌乮max100兌乯偱偡丅幚嵺偺悢抣乮AD5220偺僌儔僼乯傪尒偰傕25乣60兌偱偡丅
> 偆傑偔尵偊側偄偗偳丄寁嶼偡傞晹栧偲丄壜曄掞峈晹暘丄
> 揹尮傪擖傟傞僐僣偼丄寁嶼晹栧偵嵟弶偵揹尮傪擖傟傞偲丄摦嶌偼栤戣側偐偭偨偲巚偄傑偡丅
> 揹尮ON偱丄堦弖丄戝偒側揹棳偑棳傟偰偟傑偄傑偟偨丅
> LED偱妋擣偟偰偄傑偟偨丅偙傟偼巇曽偑側偄偐側乣丅
偦偺曈傝偺姶妎偼廳梫偱偡丅偱傕乽巇曽偑側偄偐側乣乿偲尵偭偰偄偰偼懯栚偱偡傛丅
偪傖傫偲婲摦帪偺僔乕働儞僗傪峫偊傞傋偒偱偟傚偆丅
偨偩丄偦傟埲慜偵偙偺僨僶僀僗偑偙偺傑傑巊偊傞傕偺偐偳偆偐偺敾抐傪偡傞偺偑愭偩偲巚偭偰偄傑偡丅
巊偊側偄僨僶僀僗偺堊偵僔乕働儞僗傪峫偊偰傕巇曽偑柍偄偙偲偱偡偐傜丅
<捛婰偟傑偡亜
> 偨偩丆捈偟偰偟傑偆偲丆偒偭偲丆儚儞僋儘僢僋懡偔側傝傑偡偐偹丅
儚儞僋儘僢僋懡偔側傞偲傕尵偊傑偣傫丅
偮傑傝丄PIC偑LOW弌椡偱弶婜壔偝傟傞応崌偼丄偦偺帪偵僨僶僀僗偵僋儘僢僋偑擖傞偐偳偆偐偼枹抦悢偱偡丅
揹尮偑擖傞捈慜偵CLK僺儞偺揹埑偑HIGH偺斖埻傪渇渞偭偰偄偨傜僋儘僢僋偑擖傞壜擻惈偑崅偔側傝傑偡丅
傑偨丄偦偺帪偵儚僀僷乕偑偳偪傜偵摦偔偐傕枹抦悢偱偡丅
偱丄幚嵺偵摦偐偡柦椷傪擖傟偨嵺偵丄嵟弶偺1夞栚偼儚僀僷乕偼摦偒傑偣傫丅偍偍傛偦弶婜壔乮CLK僺儞傪HIGH乯偡傞摦偒偵側傝傑偡丅
仸僨僕僞儖億僥儞僔儑僨僶僀僗偺曽偑PIC傛傝傕憗偔婲摦偟偨応崌丄揹尮僲僀僘偵傛偭偰丄僼儘乕僥傿儞僌忬懺偺CLK僺儞傪壗搙傕
忋壓偝偣傞壜擻惈傕偁傝傑偡丅側偺偱丄TR偝傫偑峴偭偰偄偨僾儖傾僢僾掞峈傪偮偗傞丄偲偄偆偺傕埆偔偼柍偄採埬偱偡丅
偱傕丄婲摦帪娫傪懸偭偨偺偪偵丄儚僀僷乕埵抲偑嵟忋抜偵偁傞偲壖掕偟偰丄嵟壓抜傑偱偝偘偰偐傜丄埵抲傪0偵偡傟偽娫堘偄側偄偲巚偄傑偡丅
峏偵丄偦偺屻偵儚僀僷乕晹傪宷偖丄偲偄偆僔乕働儞僗傕昁梫側偺偐傕偟傟傑偣傫丅
栆媿儘僢僋 2019/06/17(Mon) 00:18 No.1684 Re: 懕侾侾乕俹倂俵
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
暔偵偼壗偱傕巇妡偗偑偁傝傑偡傛偹丅
岺嶌幒攧揦偺愱栧壠偑尵偭偨尵梩傪傕偆堦搙嵞宖偟傑偡丅
岺嶌幒攧揦偺婰帠丂伀
乽掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡丅乿
http://iizukakuromaguro.sakura.ne.jp/216_digitalPOT/216_digitalPOT.html
忋婰暥復傪尒傞偲丄
幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
捛婰
壜曄掞峈婍偱偡偑5k偱偟偨丅
x9c傕5220傕奩摉側偟丅掹傔傑偡丅
暔偵偼壗偱傕巇妡偗偑偁傝傑偡傛偹丅
岺嶌幒攧揦偺愱栧壠偑尵偭偨尵梩傪傕偆堦搙嵞宖偟傑偡丅
岺嶌幒攧揦偺婰帠丂伀
乽掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡丅乿
http://iizukakuromaguro.sakura.ne.jp/216_digitalPOT/216_digitalPOT.html
忋婰暥復傪尒傞偲丄
幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
捛婰
壜曄掞峈婍偱偡偑5k偱偟偨丅
x9c傕5220傕奩摉側偟丅掹傔傑偡丅
TR 2019/06/17(Mon) 06:59 No.1685 Re: 懕侾侾乕俹倂俵
> TR偝傫
> 掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡
偙傟傑偱傕丄巹偼偦偆偄偭偨帠傪壗搙傕愢柧偟偰偒傑偟偨丅傁偭偲尒曉偟偰傕丄
No.1592
No.1602
No.1612
No.1644
No.1656
偁偨傝偼偦傟偵棈傓帠暱偱偡丅乮捈愙偼娭學側偄傕偺傕娷傫偱偄傑偡偗偳乯
偱丄杮棃乽婥偵側傜側偔側傞乿敜側偺偵丄偦偺傛偆偵摦偄偰偄側偄傛偆側偺偱丄杮摉偐偳偆偐丠乮偪傖傫偲摦偄偰偄傞偺偐乯傪
暘埑偑曵傟側偄傛偆偵乽壗傕晅偗偢偵乿丄乽揹埑乿傪應偭偰偔傟偲偄偆帠傕壗搙傕尵偭偨偲巚偄傑偡丅
> 忋婰暥復傪尒傞偲丄
> 幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偺巚偄崬傒偱夝庍偟側偄偱偔偩偝偄丅
偳偙偵傕偦傫側偙偲偼尵偭偰偄傑偣傫丅斞捤偝傫傕偦傫側偙偲傪尵傢傟偨傜崲偭偰偟傑偆偱偟傚偆丅
偦傟偼丄乽掞峈抣偑婔偮偱偁傟丄揹埑偼斾椺娭學偵側傞偐傜暘埑偱巊偆側傜偁傑傝娭學側偄乿丄偲偄偆帠偱偡丅
椺偊傟偽丄PIC偵儃儕儏乕儉傪偮偗偰丄ADC擖椡偱棙梡偟偨傝偟傑偡偗偳丄偦偺嵺偺儃儕儏乕儉偺掞峈抣偑堎側傞傕偺傪巊偭偰傕丄
乮摨偠摿惈偺傕偺側傜乯掞峈抣偼娭學側偄丄偲偄偆堄枴偱偡丅
> 帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
壗屘丄偦傟偑弌傞偺偱偟傚偆偐丠
乽暘埑偱巊梡偡傞側傜掞峈抣偼偁傑傝娭學側偄乿偲尵偭偰偄傞偺傪尒偰丄偦偺掞峈抣傪寁應偟偰傒傞丄偲偄偆峴摦偵宷偑傞偺偑傛偔敾傝傑偣傫丅
掞峈傪應傞帺懱偼埆偄帠偱偼柍偄偺偱峔偄傑偣傫偗偳丅
> 壜曄掞峈婍偱偡偑5k偱偟偨丅
> x9c傕5220傕奩摉側偟丅掹傔傑偡
偙偺寢榑傕傛偔敾傝傑偣傫丅忋弎偺傛偆偵丄暘埑棙梡側傜掞峈抣偼偁傑傝娭學偁傝傑偣傫丅
5k兌偱傕10k兌偱傕傎傏摨偠摦嶌偵側傝傑偡丅
掞峈婍亖壜曄揹棳偲偟偰棙梡偝傟偰偄傞偺側傜丄10k兌僨僶僀僗偱丄偦偺斖埻偱摦偐偣偽偄偄榖偱偡丅乮儚僀僷乕堏摦亖暘夝擻偼敿暘偵側傝傑偡偗偳乯
仸仸仸仸仸仸仸仸仸仸仸仸仸仸仸
巹傕丄偡偒岲傫偱斲掕揑側帠偽偐傝尵偭偰偄傞傢偗偱偼偁傝傑偣傫丅
栜榑丄巹偺偄偭偨帠偱丄TR偝傫偑婥暘傪奞偝傟傞偙偲傕丄懡乆偁偭偨偱偟傚偆丅
偦傟傪彸抦偱丄巜揈偡傞偺偼椙偄忬懺偱偼柍偄偲姶偠偰偄傑偡丅
側偺偱丄偟偽傜偔惷娤偝偣偰傕傜偆帠偵偟傑偡丅
> 掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡
偙傟傑偱傕丄巹偼偦偆偄偭偨帠傪壗搙傕愢柧偟偰偒傑偟偨丅傁偭偲尒曉偟偰傕丄
No.1592
No.1602
No.1612
No.1644
No.1656
偁偨傝偼偦傟偵棈傓帠暱偱偡丅乮捈愙偼娭學側偄傕偺傕娷傫偱偄傑偡偗偳乯
偱丄杮棃乽婥偵側傜側偔側傞乿敜側偺偵丄偦偺傛偆偵摦偄偰偄側偄傛偆側偺偱丄杮摉偐偳偆偐丠乮偪傖傫偲摦偄偰偄傞偺偐乯傪
暘埑偑曵傟側偄傛偆偵乽壗傕晅偗偢偵乿丄乽揹埑乿傪應偭偰偔傟偲偄偆帠傕壗搙傕尵偭偨偲巚偄傑偡丅
> 忋婰暥復傪尒傞偲丄
> 幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偺巚偄崬傒偱夝庍偟側偄偱偔偩偝偄丅
偳偙偵傕偦傫側偙偲偼尵偭偰偄傑偣傫丅斞捤偝傫傕偦傫側偙偲傪尵傢傟偨傜崲偭偰偟傑偆偱偟傚偆丅
偦傟偼丄乽掞峈抣偑婔偮偱偁傟丄揹埑偼斾椺娭學偵側傞偐傜暘埑偱巊偆側傜偁傑傝娭學側偄乿丄偲偄偆帠偱偡丅
椺偊傟偽丄PIC偵儃儕儏乕儉傪偮偗偰丄ADC擖椡偱棙梡偟偨傝偟傑偡偗偳丄偦偺嵺偺儃儕儏乕儉偺掞峈抣偑堎側傞傕偺傪巊偭偰傕丄
乮摨偠摿惈偺傕偺側傜乯掞峈抣偼娭學側偄丄偲偄偆堄枴偱偡丅
> 帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
壗屘丄偦傟偑弌傞偺偱偟傚偆偐丠
乽暘埑偱巊梡偡傞側傜掞峈抣偼偁傑傝娭學側偄乿偲尵偭偰偄傞偺傪尒偰丄偦偺掞峈抣傪寁應偟偰傒傞丄偲偄偆峴摦偵宷偑傞偺偑傛偔敾傝傑偣傫丅
掞峈傪應傞帺懱偼埆偄帠偱偼柍偄偺偱峔偄傑偣傫偗偳丅
> 壜曄掞峈婍偱偡偑5k偱偟偨丅
> x9c傕5220傕奩摉側偟丅掹傔傑偡
偙偺寢榑傕傛偔敾傝傑偣傫丅忋弎偺傛偆偵丄暘埑棙梡側傜掞峈抣偼偁傑傝娭學偁傝傑偣傫丅
5k兌偱傕10k兌偱傕傎傏摨偠摦嶌偵側傝傑偡丅
掞峈婍亖壜曄揹棳偲偟偰棙梡偝傟偰偄傞偺側傜丄10k兌僨僶僀僗偱丄偦偺斖埻偱摦偐偣偽偄偄榖偱偡丅乮儚僀僷乕堏摦亖暘夝擻偼敿暘偵側傝傑偡偗偳乯
仸仸仸仸仸仸仸仸仸仸仸仸仸仸仸
巹傕丄偡偒岲傫偱斲掕揑側帠偽偐傝尵偭偰偄傞傢偗偱偼偁傝傑偣傫丅
栜榑丄巹偺偄偭偨帠偱丄TR偝傫偑婥暘傪奞偝傟傞偙偲傕丄懡乆偁偭偨偱偟傚偆丅
偦傟傪彸抦偱丄巜揈偡傞偺偼椙偄忬懺偱偼柍偄偲姶偠偰偄傑偡丅
側偺偱丄偟偽傜偔惷娤偝偣偰傕傜偆帠偵偟傑偡丅
栆媿儘僢僋 2019/06/17(Mon) 13:04 No.1686 Re: 懕侾侾乕俹倂俵
僾儘僌儔儉傪嶌偭偰偄偨偩偒丄姶幱怽偟忋偘傑偡丅
帺暘偼丄偦偆巚偭偰偄傑偡丅
栆媿儘僢僋偝傫偼丄怓乆偲尵傢傟偰偄傑偡偑丄帺暘偼丄懡暘敿暘傕暘偐偭偰偄側偄偲巚偄傑偡丅
偦偆巚偭偰偔偩偝偄丅
傑偨丄宖帵斅偱偺傗傝庢傝偼丄憡庤懁偵丄帺暘偑巚偭偨捠傝偵揱傢傝偯傜偄偲傕巚偄傑偡丅
壜曄掞峈婍姺憰偺審偱偡偑丄偮偄偰偄偨傕偺偼5k側傫偱偡傛丄ML4偵偔偭偮偄偰偄傞忬懺偩偲1k偱偟偨丅
懡暘壗偐偺尨場偑偁傞偲巚偄傑偡丅
偦偙偱丄侾侽倠偺壜曄掞峈婍傪偮偗偨傜丄暰奞傗屘忈偵偮側偑傞偙偲偑婥偵側偭偨偺偱丄
傗傔傛偆偐偲峫偊傑偟偨丅
偦偆偄偭偨怱攝偑侾侽侽亾側偄側傜丄懕偗偰峴偙偆偐偲巚偄傑偡丅
偦傟偐傜丄x9們偼夡傟偰偄偰丄揹埑側偳偼寁應偱偒側忬懺偱棃偰偄傑偟偨傛丅
仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊丄
僨僕僞儖億僥儞僔儑儞偺曽偼丄愘偄帺暘偱偡偑丄堦弿偵恑傓婥帩偪偱偄傑偡丅
傑偨丄偱偒傞傕偺側傜丄帺暘傕棟夝偟偨偄偲巚偭偰偄傑偡偺偱丄堷偒懕偒傛傠偟偔偍婅偄偟傑偡丅
帺暘偼丄偦偆巚偭偰偄傑偡丅
栆媿儘僢僋偝傫偼丄怓乆偲尵傢傟偰偄傑偡偑丄帺暘偼丄懡暘敿暘傕暘偐偭偰偄側偄偲巚偄傑偡丅
偦偆巚偭偰偔偩偝偄丅
傑偨丄宖帵斅偱偺傗傝庢傝偼丄憡庤懁偵丄帺暘偑巚偭偨捠傝偵揱傢傝偯傜偄偲傕巚偄傑偡丅
壜曄掞峈婍姺憰偺審偱偡偑丄偮偄偰偄偨傕偺偼5k側傫偱偡傛丄ML4偵偔偭偮偄偰偄傞忬懺偩偲1k偱偟偨丅
懡暘壗偐偺尨場偑偁傞偲巚偄傑偡丅
偦偙偱丄侾侽倠偺壜曄掞峈婍傪偮偗偨傜丄暰奞傗屘忈偵偮側偑傞偙偲偑婥偵側偭偨偺偱丄
傗傔傛偆偐偲峫偊傑偟偨丅
偦偆偄偭偨怱攝偑侾侽侽亾側偄側傜丄懕偗偰峴偙偆偐偲巚偄傑偡丅
偦傟偐傜丄x9們偼夡傟偰偄偰丄揹埑側偳偼寁應偱偒側忬懺偱棃偰偄傑偟偨傛丅
仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊丄
僨僕僞儖億僥儞僔儑儞偺曽偼丄愘偄帺暘偱偡偑丄堦弿偵恑傓婥帩偪偱偄傑偡丅
傑偨丄偱偒傞傕偺側傜丄帺暘傕棟夝偟偨偄偲巚偭偰偄傑偡偺偱丄堷偒懕偒傛傠偟偔偍婅偄偟傑偡丅
TR 2019/06/17(Mon) 13:37 No.1687 Re: 懕侾侾乕俹倂俵
栆媿儘僢僋偝傫丆俿俼偝傫丆偙傫偽傫偼丅
栆媿儘僢僋偝傫丆侾俇俥俉俉偺審偼偛採埬偁傝偑偲偆偛偞偄傑偡丅
巹傕丆偦傠偦傠偐側丆側傫偰巚偄傑偡偑丆俫俹忋偵偼丆俉俉偺忣曬傑偩丆偁傞傛偆側偺偱丆偪傚偲峫偊傞傫偱偡偑丆
挭帪偱偡偹丅
戙懼偊偱偡偑丆惈擻傕偝傞偙偲側偑傜丆抣抜傕戝偒偄偱偡偹丅
偪側傒偵廐寧偱偼丆俉俉偼丆俀俈侽墌偱偟偨丅
抣抜峫偊傞偲丆堦斣埨偄丆侾俇F侾俉俀俈偁偨傝偐側側傫偰巚偄傑偡丅
俿俼偝傫丆崱斢丆俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆
俙俢俆俀俀侽偵抲偒姺偊偰丆儌乕僞乕夞偟偰傒傑偟偨丅
寢榑偐傜尵偆偲丆儌乕僞乕傪僐儞僩儘乕儖偡傞偙偲偼丆
壜擻偱偟偨丅
偨偩丆幚嵺巊偆偲側傞偲丆栆媿儘僢僋偝傫偑偍偭偟傖偭偨傛偆偵丆僔乕働儞僗傪偄傠偄傠峫偊傞傛偆偱偟傚偆偹丅
偄傠偄傠傗偭偰傒偰丆庤嫮偄姶偠偟偰傑偡丅
偍偐偟側摦嶌偑丆偄偔偮偐偁傝傑偟偨丅
堦斣抂偺億僕僔儑儞偐傜丆堦偮偢儚僀僷乕傪摦偐偟偰峴偒傑偟偨丅
杮棃側傜丆夞揮悢偼丆儚僀僷乕傪堦掕偺曽岦偵摦偐偡偵偮傟偰丆
忋偑傞摦嶌偺孹岦丆偁傞偄偼丆壓偑傞摦嶌偺孹岦傪懕偗傞偼偢偱偡偑丆
懠偺億僕僔儑儞偱偼丆夞揮悢偑壓偑傞偺偵丆偁傞摿掕偺億僕僔儑儞偱偼丆
夞揮悢偑忋偑傞丆師偺億僕僔儑儞偱偼丆傑偨壓偑傞丆偲偄偆尰徾偑傒傜傟傑偟偨丅
壗夞偐幚尡偟偰丆枅夞摨偠応強偱偍偒傑偡偺偱丆
僾儘僌儔儉偺栤戣傛傝偼僴乕僪偺摿惈偺傛偆側婥偑偟傑偡偑丆
僉乕敾掕偱妱傝崬傒巊偭偰傑偡偺偱丆妱傝崬傒偺塭嬁傕偁傞偺偐丆
偙偺曈偼偪傚偭偲傢偐傝傑偣傫丅
偙傟丆掞峈抣偺岆嵎偲摨偠偱丆儚僀僷乕偺摦嶌偵巊偭偰傞丆
俥俤俿丠僩儔儞僕僗僞丠僟僀僆乕僪丠偺摿惈偺堘偄側偺偐側偲
巚偄傑偟偨丅
偦傟偲丆幚嵺偵儌乕僞乕傪夞偡偲丆僲僀僘偑弌偰偔傞偺偐丆
俙俢俆俀俀侽偺揹尮傪擖傟偰偐傜丆儌乕僞乕偺揹尮偄傟傞偲丆
岆摦嶌偑懡偄姶偠偱偡丅
儌乕僞乕揹尮俷俶仺俙俢俆俀俀侽丂俷俶仺俹俬俠丂俷俶
偺弴斣偺曽偑偄偄傛偆偱偡丅
傕偆偪傚偭偲偄偠偭偰尒傑偡丅
栆媿儘僢僋偝傫丆侾俇俥俉俉偺審偼偛採埬偁傝偑偲偆偛偞偄傑偡丅
巹傕丆偦傠偦傠偐側丆側傫偰巚偄傑偡偑丆俫俹忋偵偼丆俉俉偺忣曬傑偩丆偁傞傛偆側偺偱丆偪傚偲峫偊傞傫偱偡偑丆
挭帪偱偡偹丅
戙懼偊偱偡偑丆惈擻傕偝傞偙偲側偑傜丆抣抜傕戝偒偄偱偡偹丅
偪側傒偵廐寧偱偼丆俉俉偼丆俀俈侽墌偱偟偨丅
抣抜峫偊傞偲丆堦斣埨偄丆侾俇F侾俉俀俈偁偨傝偐側側傫偰巚偄傑偡丅
俿俼偝傫丆崱斢丆俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆
俙俢俆俀俀侽偵抲偒姺偊偰丆儌乕僞乕夞偟偰傒傑偟偨丅
寢榑偐傜尵偆偲丆儌乕僞乕傪僐儞僩儘乕儖偡傞偙偲偼丆
壜擻偱偟偨丅
偨偩丆幚嵺巊偆偲側傞偲丆栆媿儘僢僋偝傫偑偍偭偟傖偭偨傛偆偵丆僔乕働儞僗傪偄傠偄傠峫偊傞傛偆偱偟傚偆偹丅
偄傠偄傠傗偭偰傒偰丆庤嫮偄姶偠偟偰傑偡丅
偍偐偟側摦嶌偑丆偄偔偮偐偁傝傑偟偨丅
堦斣抂偺億僕僔儑儞偐傜丆堦偮偢儚僀僷乕傪摦偐偟偰峴偒傑偟偨丅
杮棃側傜丆夞揮悢偼丆儚僀僷乕傪堦掕偺曽岦偵摦偐偡偵偮傟偰丆
忋偑傞摦嶌偺孹岦丆偁傞偄偼丆壓偑傞摦嶌偺孹岦傪懕偗傞偼偢偱偡偑丆
懠偺億僕僔儑儞偱偼丆夞揮悢偑壓偑傞偺偵丆偁傞摿掕偺億僕僔儑儞偱偼丆
夞揮悢偑忋偑傞丆師偺億僕僔儑儞偱偼丆傑偨壓偑傞丆偲偄偆尰徾偑傒傜傟傑偟偨丅
壗夞偐幚尡偟偰丆枅夞摨偠応強偱偍偒傑偡偺偱丆
僾儘僌儔儉偺栤戣傛傝偼僴乕僪偺摿惈偺傛偆側婥偑偟傑偡偑丆
僉乕敾掕偱妱傝崬傒巊偭偰傑偡偺偱丆妱傝崬傒偺塭嬁傕偁傞偺偐丆
偙偺曈偼偪傚偭偲傢偐傝傑偣傫丅
偙傟丆掞峈抣偺岆嵎偲摨偠偱丆儚僀僷乕偺摦嶌偵巊偭偰傞丆
俥俤俿丠僩儔儞僕僗僞丠僟僀僆乕僪丠偺摿惈偺堘偄側偺偐側偲
巚偄傑偟偨丅
偦傟偲丆幚嵺偵儌乕僞乕傪夞偡偲丆僲僀僘偑弌偰偔傞偺偐丆
俙俢俆俀俀侽偺揹尮傪擖傟偰偐傜丆儌乕僞乕偺揹尮偄傟傞偲丆
岆摦嶌偑懡偄姶偠偱偡丅
儌乕僞乕揹尮俷俶仺俙俢俆俀俀侽丂俷俶仺俹俬俠丂俷俶
偺弴斣偺曽偑偄偄傛偆偱偡丅
傕偆偪傚偭偲偄偠偭偰尒傑偡丅
mabo 2019/06/18(Tue) 00:08 No.1688 Re: 懕侾侾乕俹倂俵
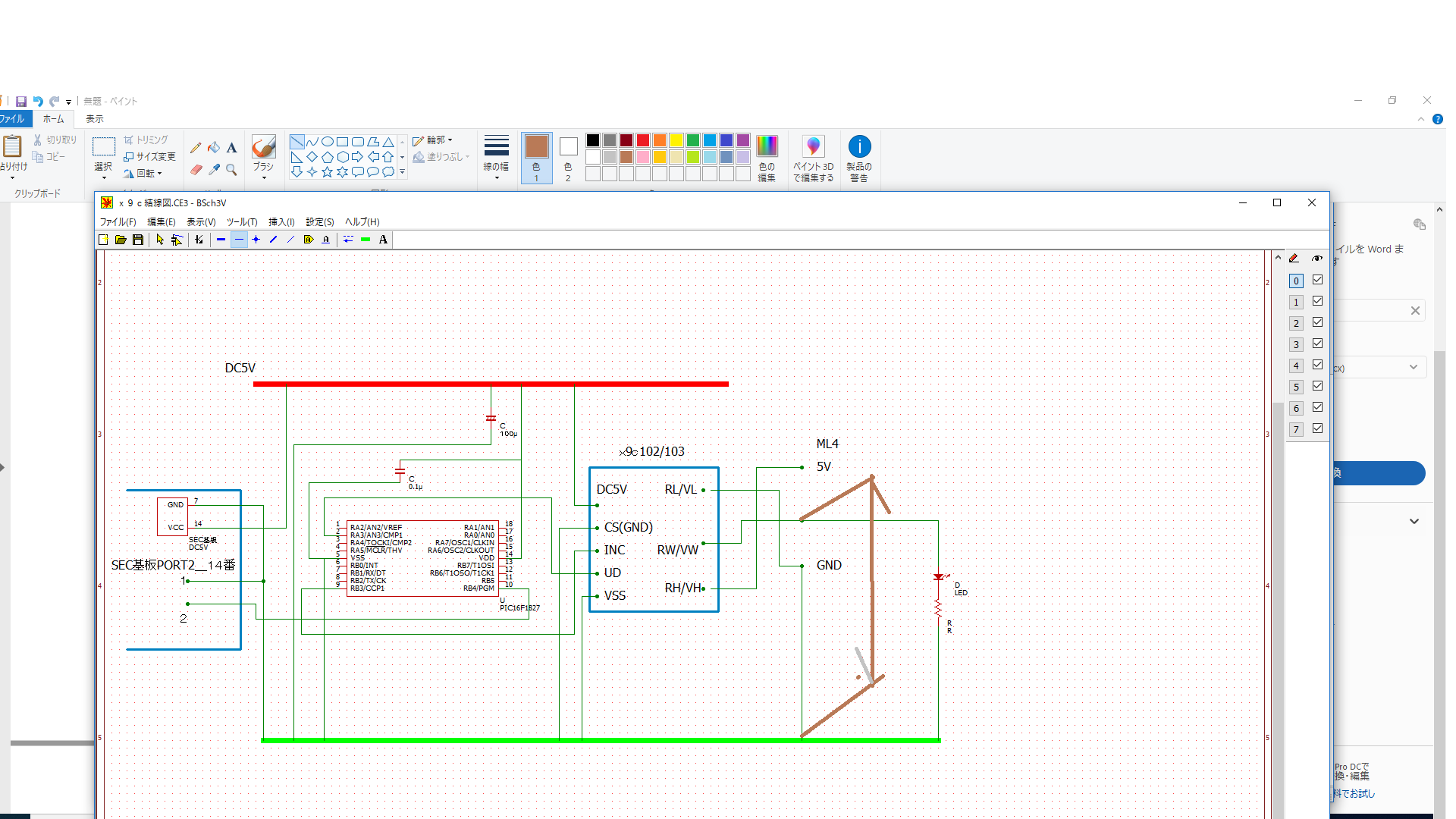 mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅亜俿俼偝傫丆崱斢丆俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆
俙俢俆俀俀侽偵抲偒姺偊偰丆儌乕僞乕夞偟偰傒傑偟偨丅
寢榑偐傜尵偆偲丆儌乕僞乕傪僐儞僩儘乕儖偡傞偙偲偼丆
壜擻偱偟偨丅
偨偩丆幚嵺巊偆偲側傞偲丆栆媿儘僢僋偝傫偑偍偭偟傖偭偨傛偆偵丆僔乕働儞僗傪偄傠偄傠峫偊傞傛偆偱偟傚偆偹丅
偄傠偄傠傗偭偰傒偰丆庤嫮偄姶偠偟偰傑偡丅
乑僔乕働儞僗偲偄偆扨岅偱偡偑丄惂屼偡傞弴斣偱偟傚偆偐丄偦偆側傜丄昁梫偲帺暘傕幚尡帪偵巚偄傑偟偨丅
亜偍偐偟側摦嶌偑丆偄偔偮偐偁傝傑偟偨丅
堦斣抂偺億僕僔儑儞偐傜丆堦偮偢儚僀僷乕傪摦偐偟偰峴偒傑偟偨丅
杮棃側傜丆夞揮悢偼丆儚僀僷乕傪堦掕偺曽岦偵摦偐偡偵偮傟偰丆
忋偑傞摦嶌偺孹岦丆偁傞偄偼丆壓偑傞摦嶌偺孹岦傪懕偗傞偼偢偱偡偑丆
懠偺億僕僔儑儞偱偼丆夞揮悢偑壓偑傞偺偵丆偁傞摿掕偺億僕僔儑儞偱偼丆
夞揮悢偑忋偑傞丆師偺億僕僔儑儞偱偼丆傑偨壓偑傞丆偲偄偆尰徾偑傒傜傟傑偟偨丅
壗夞偐幚尡偟偰丆枅夞摨偠応強偱偍偒傑偡偺偱丆
乑帺暘偺x9c偼偦偆偄偭偨帠偼偁傝傑偣傫偱偟偨丅
亜僾儘僌儔儉偺栤戣傛傝偼僴乕僪偺摿惈偺傛偆側婥偑偟傑偡偑丆
僉乕敾掕偱妱傝崬傒巊偭偰傑偡偺偱丆妱傝崬傒偺塭嬁傕偁傞偺偐丆
偙偺曈偼偪傚偭偲傢偐傝傑偣傫丅
乑僉乕敾掕偭偰壗偱偡偐丠
亜偙傟丆掞峈抣偺岆嵎偲摨偠偱丆儚僀僷乕偺摦嶌偵巊偭偰傞丆
俥俤俿丠僩儔儞僕僗僞丠僟僀僆乕僪丠偺摿惈偺堘偄側偺偐側偲
巚偄傑偟偨丅
偦傟偲丆幚嵺偵儌乕僞乕傪夞偡偲丆僲僀僘偑弌偰偔傞偺偐丆
俙俢俆俀俀侽偺揹尮傪擖傟偰偐傜丆儌乕僞乕偺揹尮偄傟傞偲丆
岆摦嶌偑懡偄姶偠偱偡丅
儌乕僞乕揹尮俷俶仺俙俢俆俀俀侽丂俷俶仺俹俬俠丂俷俶
偺弴斣偺曽偑偄偄傛偆偱偡丅
乑
帺暘偑幚尡帪偵巚偭偰偄偨弴斣偲恀媡偱偡丅
棟桼
倶俋們慡懱傪ON偵偡傞偲丄堦弖丄儌僯僞乕梡LED偑敪岝偟偨丅
LED偺敪岝嬶崌偩偗傪尒傞偲摦嶌偼埨掕偟偰偄傑偟偨丅
偄傠傫側傕偺偑偁傞偺偱丄晄嬶崌屄強傪尒偮偗傞偺偼戝曄偱偡傛偹丅
帺暘偺帪偼丄
埲壓偺扨弮側幚尡曽朄偱偟偨丅偦偺帪偼丄揹埑抣乮侾侽係倣V乣4.5V)丄
掞峈抣乮210兌乣8.5倠兌乯乯丅
摦嶌偼僗儉乕僗偱偟偨丅偨偩偟丄倶俋們偼丄揹尮晹傪ON偵偟丄師偵壜曄掞峈晹暘偵揹尮傪擖傟傑偟偨丅
No1584偱丄堦搙揹埑抣傪曬崘乮157倣V~4.5V乯偟傑偟偨偑丄儊儌傪尒傞偲104倣V~4.5V
偱偟偨丅
幚尡曽朄
VR乣PIC乣倶俋們乣LED
應掕売強偼丄幨恀傪嶲徠偟偰偔偩偝偄丅
仏
嵟屻偵堦揰妋擣偝偣偰偔偩偝偄丅
5220偺僾儘僌儔儉偼丄No1671傪偦偺傑傑巊偭偰偄傑偡偐丠
偦傟偲丄帺暘偺幚尡曽朄偱偼婥偵側傞摦嶌偼側偐偭偨偺偱偟傚偆偐丠
仏5220偺愨懳掕奿傪尒傞偲丄乽Bx~Wx丂僾儔僗儅僀僫僗20倣A乿偲側偭偰偄傞偺偱丄
5220側傜丄敪岝LED乮栺侾侽mA偵梷偊偰乯傪巊偭偰傕夡傟側偄偲巚偄傑偡丅
崱屻偵偮偄偰
丒捛壛偺倶俋們偑棃偨傜傕偆堦搙僥僗僩傪偟傑偡丅
丒帺暘偼丄僨僕僞儖億僥儞僔儑儞傪傗傔傞偮傕傝偱偡丅
婛懚壜曄掞峈偼丄搶嫗僐僗儌僗惢偱5倠偑巊傢傟偰偄傑偟偨丅
ML4偵偮偄忬懺偱偼丄掞峈抣偼侾倠偱偟偨丅
掞峈抣偵嵎偑偁傞偺偼丄壗偐偺棟桼偑偁傞偲巚偄傑偡丅
x9c傕5220傕俆倠偼側偄傫偱偡丅岎姺傪偟偰丄暰奞傗屘忈偑晐偔側傝傑偟偨丅
偱丄側傫偱偡偑丄
mabo偝傫偑尵偭偰偄偨尵梩傪巚偄弌偟傑偟偨丅
堘偆曽朄偱壜曄掞峈偲摨條側摦嶌傪偡傞曽朄傕峫偊偰偄傞偲丅
嶲峫URL側偳偁傝傑偟偨傜丄曽朄傪娷傔偰嫵偊偰壓偝偄丅
丂No1633偵偦傟傜偟偒幨恀偑尒偊傑偡両両両
TR 2019/06/18(Tue) 05:57 No.1689 Re: 懕侾侾乕俹倂俵
俿俼偝傫丆栆媿儘僢僋偝傫偍偼傛偆偛偞偄傑偡丅
俿俼偝傫丆僾儘僌儔儉偱偡偑丆栆媿儘僢僋偝傫傗俿俼偝傫偍巊偄偺堦晹暘傪巊偭偰傑偡丅
摦嶌傪妋擣偟偨偐偭偨偺偱丆僞僋僩僗僀僢僠傪巊偭偰丆儚僀僷乕傪up丆down丆偡傞僾儘僌儔儉傪嶌傝傑偟偨丅
崱擔傕偄傠偄傠摦偐偟傑偟偨偑丆崱擔偼丆
儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
偑傎傏侾侽侽亾嬤偔僐儞僩儘乕儖偱偒傑偟偨丅
堦昩埲撪偲偄偆偺偼丆PIC偱AD俆俀俀侽偺弶婜壔侾昩掱搙傑偭偰偄傑偡丅
偦傟偲丆僋儘僢僋偺敪惗偱丆侽仺侾傪懕偗偰峴偆偺偱丆
擮偺偨傔丂LATABits.RA0丂偲偐偄偆昞婰傪巊偄傑偟偨丅
師偺儁乕僕偵摢偵偁偭偨峔憐偺奊宖嵹偟傑偡丅
巹偺摢偵偁偭偨傕偺偱丆HP偼偁傞偐偳偆偐晄柧偱偡丅
偦傟偲丆俿俼偝傫偺幚尡曽朄偱偡偑丆偁傟偙傟偄偊傞傎偳抦幆側偄偺偱偡偑丆
婥偵側傞偺偼丆俽俤俠偝傫偺婎斦偍巊偄偺偙偲偱偡丅
埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡偺曽偑偄偄偐偲巚偄傑偟偨丅
崱夞偺儐乕僠儏乕僽偺摦夋偼丆俽俤俠偝傫偺婎斦傗俽俽偲偼愙懕偟偰偄傑偣傫丅
俿俼偝傫丆僾儘僌儔儉偱偡偑丆栆媿儘僢僋偝傫傗俿俼偝傫偍巊偄偺堦晹暘傪巊偭偰傑偡丅
摦嶌傪妋擣偟偨偐偭偨偺偱丆僞僋僩僗僀僢僠傪巊偭偰丆儚僀僷乕傪up丆down丆偡傞僾儘僌儔儉傪嶌傝傑偟偨丅
崱擔傕偄傠偄傠摦偐偟傑偟偨偑丆崱擔偼丆
儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
偑傎傏侾侽侽亾嬤偔僐儞僩儘乕儖偱偒傑偟偨丅
堦昩埲撪偲偄偆偺偼丆PIC偱AD俆俀俀侽偺弶婜壔侾昩掱搙傑偭偰偄傑偡丅
偦傟偲丆僋儘僢僋偺敪惗偱丆侽仺侾傪懕偗偰峴偆偺偱丆
擮偺偨傔丂LATABits.RA0丂偲偐偄偆昞婰傪巊偄傑偟偨丅
師偺儁乕僕偵摢偵偁偭偨峔憐偺奊宖嵹偟傑偡丅
巹偺摢偵偁偭偨傕偺偱丆HP偼偁傞偐偳偆偐晄柧偱偡丅
偦傟偲丆俿俼偝傫偺幚尡曽朄偱偡偑丆偁傟偙傟偄偊傞傎偳抦幆側偄偺偱偡偑丆
婥偵側傞偺偼丆俽俤俠偝傫偺婎斦偍巊偄偺偙偲偱偡丅
埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡偺曽偑偄偄偐偲巚偄傑偟偨丅
崱夞偺儐乕僠儏乕僽偺摦夋偼丆俽俤俠偝傫偺婎斦傗俽俽偲偼愙懕偟偰偄傑偣傫丅
mabo 2019/06/18(Tue) 11:17 No.1690 Re: 懕侾侾乕俹倂俵
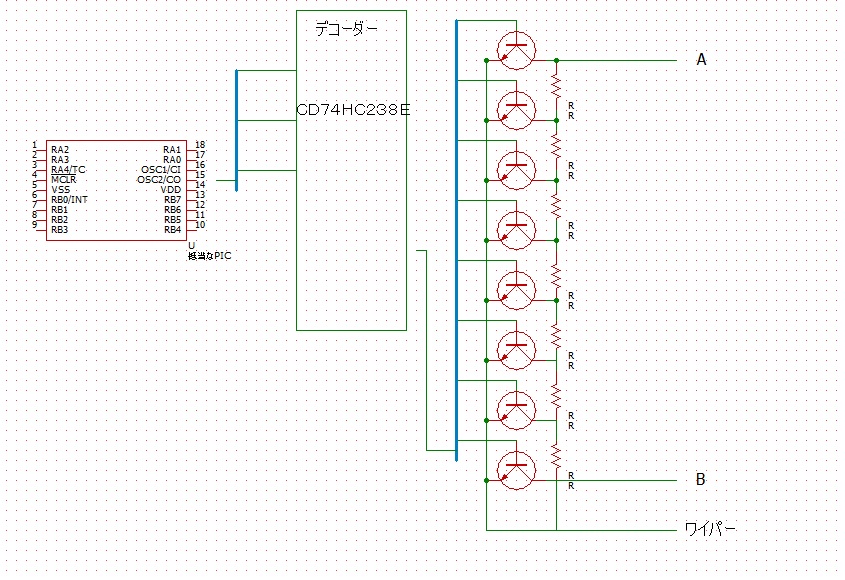 俿俼偝傫丆摢偵偁偭偨峔憐偺攝慄恾偱偡丅
俿俼偝傫丆摢偵偁偭偨峔憐偺攝慄恾偱偡丅X9C 傗丂俙俢俆俀俀侽傪丂僷僋偭偨偩偗偱偡丅
偙偺僨僐乕僟俬俠乮廐寧乯傪巊偆偲俁杮偺慄偱丆俉屄偺僩儔儞僕僗僞乕摍偺僐儞僩儘乕儖偑偱偒傞傛偆偱偡丅
暋悢屄偮偐偭偰丆僐儞僩儘乕儖偡傞偵偼丆係杮偺慄偑昁梫偵
側傝傑偡偑丆
侾俉僺儞偐俀侽僺儞偺俹俬俠傪巊偆偲丆俁屄偺僨僐乕僟僐儞僩儘乕儖偱偒傑偡偺偱丆
俀係屄偺掞峈傪憖嶌偱偒偦偆偱偡丅
偨偩丆巊偆暔偺揹婥揑側摿惈摍偵偮偄偰丆抦幆偑丆偐側傝彮側偄忬懺偱偡偺偱丆
幚尡偱偺僩儔僀傾儞僪僄儔乕偵側傞偐側偁丆偲巚偄傑偡丅
仏仏仏捛婰偱偡丅仏仏仏仏
傛偔暘偐傜側偄偺偱偡偑丆屄恖揑偵偼丆俆倠兌偺偲偙傠偵丆
侾侽倠兌偺掞峈巊偭偰傕戝偒側婋尟偼側偄傛偆側婥偑偟偰傑偡丅
偙偺媡偩偲丆偪傚偭偲晐偄姶偠偱偡丅
mabo 2019/06/18(Tue) 11:31 No.1691 Re: 懕侾侾乕俹倂俵
mabo偝傫丄偙傫偵偪偼丅
僾儘僌儔儉傪曄峏偝傟偨偲偄偆偙偲偱偡偑丄戝暘恑傫偱偄傞傛偆偩偟丄儌乕僞乕偑夞偭偰椙偐偭偨偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
pic偲5220偺揹尮偼丄摨偠偲巚偄傑偡偑丄pic偑ON偟偰丄1昩埲撪偵丄5220偑ON偝偣傞曽朄丠
僾儘僌儔儉曄峏偵
昁梫側帪娫傪彂偄偨偺偐側丠
偳偺傛偆偵偟傑偟偨偐丠
僾儘僌儔儉傪嫵偊偰壓偝偄丅
壗張偱LATA偱偡偑丄妋偐丄ink傗ud偵學傞僾儘僌儔儉偱傢丄摉弶偐傜巊偭偰偄傑偟偨傛丅
>僨僐乕僟俬俠乮廐寧乯
忣曬桳傝擄偆偛偞偄傑偡丅
儕儗乕偺戙傢傝偱偡偹丅儕儗乕傛傝埨偔偰椙偝偦偆丅
偲偙傠偱丄
壜曄掞峈偺暘埑偲偟偰偺婡擻偼偳偆偡傞偺偩傠丠
椺偊偽丄嵟忋抜偺僩儔儞僕僗僞傪ON偺帪
A~儚僀僷乕偺掞峈偼0丄儚僀僷乕~B偼丄偦偺娫偺崌惉掞峈抣偲側傞丅
VR偺応崌丄A~儚僀僷乕娫偵掞峈抣偑偁傞偲巚偄傑偡丅
偦偺堘偄偼偳偆偟偨傜傛偄偐丠
暘偐傝傑偣傫偐丅
幚偼丄偪傚偭偲慜偐傜丄峫偊偰偄傑偟偨偑丄暘偐傝傑偣傫偱偟偨
>埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡
崱傡丄嵞屬梡偺寖埨僒儔儕乕側偺偱丄埨慡戞堦偱丄恑傔傑偡丅
傾僪僶僀僗丄桳傝擄偆偛偞偄傑偡丅
偦偆偩
5220偼暘埑偟偰巊偭偰偄傞偺偱偡偐丠
儚僀僷乕偺愭偵FET偺僎乕僩偲偮側偑偭偰偄傞偺偐丠
僾儘僌儔儉傪曄峏偝傟偨偲偄偆偙偲偱偡偑丄戝暘恑傫偱偄傞傛偆偩偟丄儌乕僞乕偑夞偭偰椙偐偭偨偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
pic偲5220偺揹尮偼丄摨偠偲巚偄傑偡偑丄pic偑ON偟偰丄1昩埲撪偵丄5220偑ON偝偣傞曽朄丠
僾儘僌儔儉曄峏偵
昁梫側帪娫傪彂偄偨偺偐側丠
偳偺傛偆偵偟傑偟偨偐丠
僾儘僌儔儉傪嫵偊偰壓偝偄丅
壗張偱LATA偱偡偑丄妋偐丄ink傗ud偵學傞僾儘僌儔儉偱傢丄摉弶偐傜巊偭偰偄傑偟偨傛丅
>僨僐乕僟俬俠乮廐寧乯
忣曬桳傝擄偆偛偞偄傑偡丅
儕儗乕偺戙傢傝偱偡偹丅儕儗乕傛傝埨偔偰椙偝偦偆丅
偲偙傠偱丄
壜曄掞峈偺暘埑偲偟偰偺婡擻偼偳偆偡傞偺偩傠丠
椺偊偽丄嵟忋抜偺僩儔儞僕僗僞傪ON偺帪
A~儚僀僷乕偺掞峈偼0丄儚僀僷乕~B偼丄偦偺娫偺崌惉掞峈抣偲側傞丅
VR偺応崌丄A~儚僀僷乕娫偵掞峈抣偑偁傞偲巚偄傑偡丅
偦偺堘偄偼偳偆偟偨傜傛偄偐丠
暘偐傝傑偣傫偐丅
幚偼丄偪傚偭偲慜偐傜丄峫偊偰偄傑偟偨偑丄暘偐傝傑偣傫偱偟偨
>埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡
崱傡丄嵞屬梡偺寖埨僒儔儕乕側偺偱丄埨慡戞堦偱丄恑傔傑偡丅
傾僪僶僀僗丄桳傝擄偆偛偞偄傑偡丅
偦偆偩
5220偼暘埑偟偰巊偭偰偄傞偺偱偡偐丠
儚僀僷乕偺愭偵FET偺僎乕僩偲偮側偑偭偰偄傞偺偐丠
TR 2019/06/18(Tue) 13:44 No.1692 Re: 懕侾侾乕俹倂俵
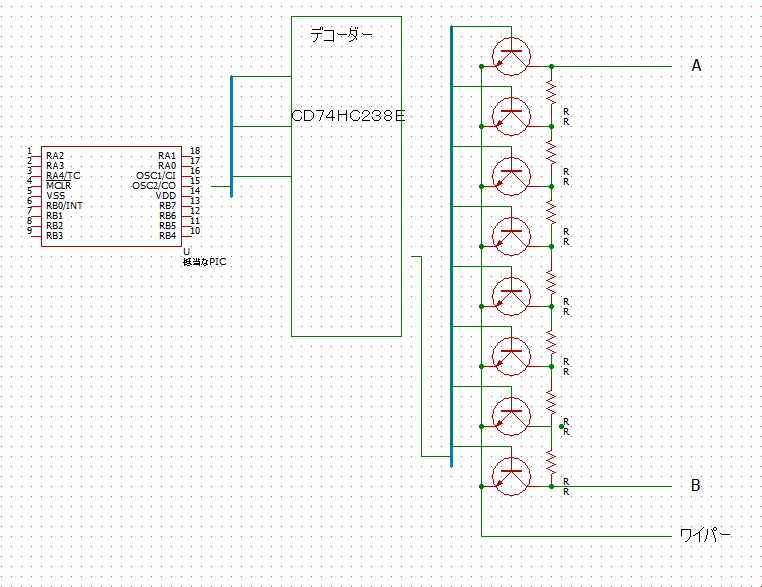 俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偵偪偼丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偵偪偼丅慜宖偺奊娫堘偄偁傝傑偟偨偺偱丆嵞宖偟傑偡丅
嵶偐偄偙偲偼丆傗偭偰傒側偄偲暘偐傜側偄偐側偁丅
僾儘僌儔儉偱偡偑丆僉乕敾掕偵丂up丂down丂偺晹暘棈傑偣偨
偩偗偱偡丅
ADC摍偼徣偒傑偟偨丅
偦傟偲丆UP.DOWN丂偺僒僽娭悢丆侽乣侾俀俉丂偙偊偰傕丆
摦嶌偱偒傞傛偆偵偟偰傑偡丅
偁傑傝偁傑傝朖傔偨暔偱偼偁傝傑偣傫偑丆壓婰偑偦傟偱偡丅
俉俉攋懝偝偣偰偟傑偨偺偱丆庤帩偪偺侾俉俀俈偱偡丅
仏仏仏捛婰仏仏仏
僽儗僢僪儃乕僪偱偺嶌惉側偺偱丆PIC丂AD5220丂PWM僐儞僩儘乕儔乕丆慡晹丆暿揹尮偵偟偰傑偡丅
//***************************************
// PIC16F1827 Configuration Bit Settings
//
// 'C' source line config statements
//
// 2019-6-15 dejitaru_UP_DW
//
//LCD僺儞傾僒僀儞
// LCD_RS RA7
// LCD_EN RA6
// LCD_D4 RB7
// LCD_D5 RB6
// LCD_D6 RB5
// LCD_D7 RB4
//
//input 僉乕
//TEN_UP RB2
//TEN_DW RA4
//ONE_UP RB1
//ONE_DW
//
// CONFIG1
#pragma config FOSC = INTOSC // Oscillator Selection (INTOSC oscillator: I/O function on CLKIN pin)
#pragma config WDTE = OFF // Watchdog Timer Enable (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable (PWRT disabled)
#pragma config MCLRE = OFF // MCLR Pin Function Select (MCLR/VPP pin function is digital input)
#pragma config CP = OFF // Flash Program Memory Code Protection (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Memory Code Protection (Data memory code protection is disabled)
#pragma config BOREN = OFF // Brown-out Reset Enable (Brown-out Reset disabled)
#pragma config CLKOUTEN = OFF // Clock Out Enable (CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin)
#pragma config IESO = ON // Internal/External Switchover (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable (Fail-Safe Clock Monitor is enabled)
// CONFIG2
#pragma config WRT = OFF // Flash Memory Self-Write Protection (Write protection off)
#pragma config PLLEN = OFF // PLL Enable (4x PLL disabled)
#pragma config STVREN = ON // Stack Overflow/Underflow Reset Enable (Stack Overflow or Underflow will cause a Reset)
#pragma config BORV = HI // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (Vbor), low trip point selected.)
#pragma config LVP = OFF // Low-Voltage Programming Enable (Low-voltage programming enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
#include <stdlib.h>
#include "skSD1602LCD.h"
#define _XTAL_FREQ 8000000
#define TEN_UP RB2
#define ONE_UP RB1
#define TEN_DW RA4
#define ONE_DW RA3
#define CLK LATAbits.LATA1//AD5220僐儞僩儘乕儖
#define U_D LATAbits.LATA2//AD5220 傾僢僾僟僂儞
#define FALSE 0
#define TRUE 1
//曄悢愰尵
int count;
int WP_POSITION;
long pwmOnTimeCounter;
long pwmPeriodCounter;
long CONTROL_MODE_EXTERNAL_PWM_LOW;
unsigned int dutyCycle;
unsigned int lcd_dutyCycle;
unsigned char bGotPwmPulse;
volatile char str[7];
volatile int TEN_KEY_UP;
volatile int TEN_KEY_DW;
volatile int ONE_KEY_UP;
volatile int ONE_KEY_DW;
volatile int TEN_KEY_UP_COUNT;
volatile int TEN_KEY_DW_COUNT;
volatile int ONE_KEY_UP_COUNT;
volatile int ONE_KEY_DW_COUNT;
int WP_POSITION=64;
//娭悢愰尵
void main(void);
static void interrupt warikomi(void) ;
void lcd_hyouji(void);
void wp_TEN_UP(void);
void wp_TEN_DW(void);
void wp_ONE_UP(void);
void wp_ONE_DW(void);
void syokika(void);
/*******************************************************************************
* 儊僀儞偺張棟 *
*******************************************************************************/
void main(void)
{
int i ;
char s[17] ;
char mes[6]= {0xbd,0xc0,0xb0,0xc4,0x00} ; // "僗僞乕僩"暥帤偺僇僞僇僫僨乕僞
//static unsigned char buff[12];
OSCCON = 0b01110010 ; // 撪晹僋儘僢僋偼俉俵俫倸偲偡傞
__delay_ms(500);
__delay_ms(500);
ANSELA = 0b00000000 ; // 慡偰僨僕僞儖I/O偲偡傞
ANSELB = 0b00000000 ; // 慡偰僨僕僞儖I/O偲偡傞
TRISA = 0b00111000 ; // 僺儞(RA)偼弌椡偵妱摉偰傞(RA5.4.3偼擖椡)
TRISB = 0b00000110 ; // RB1.2偼丂擖椡丂懠偼慡偰偼弌椡
PORTA = 0b00111110 ; // RA弌椡僺儞偺弶婜壔
PORTB = 0b00000110 ; // RB弌椡僺儞偺弶婜壔
TEN_KEY_UP=FALSE;
TEN_KEY_DW=FALSE;
ONE_KEY_UP=FALSE;
ONE_KEY_UP=FALSE;
TMR0=157;
TMR0IF=0;
OPTION_REG=0b000000101;//2019-5-29曄峏
TMR0IE = 1;//僞僀儅乕0妱傝崬傒敪惗嫋壜
GIE= 1;//妱傝崬傒慡懱偺嫋壜
__delay_ms(500);
__delay_ms(500);
lcd_init( ) ;//LCD弶婜壔張棟
syokika( );//5220弶婜壔張棟wp傪A抂巕懁偵
i = 0 ;
while(1) {
lcd_setCursor(0,0) ;
lcd_puts("wp-POSITION:");
lcd_setCursor(0,1) ;
lcd_puts("ohom:");
lcd_hyouji( );
__delay_ms(500) ; // 侾昩屻偵孞傝曉偡
if(TEN_KEY_UP==TRUE && TEN_UP==1){
wp_TEN_UP( );
lcd_hyouji( );
TEN_KEY_UP=FALSE;
}
if(ONE_KEY_UP==TRUE && ONE_UP==1){
wp_ONE_UP( );
lcd_hyouji( );
ONE_KEY_UP=FALSE;
}
if(TEN_KEY_DW==TRUE && TEN_DW==1){
wp_TEN_DW( );
lcd_hyouji( );
TEN_KEY_DW=FALSE;
}
if(ONE_KEY_DW==TRUE && ONE_DW==1){
wp_ONE_DW( );
lcd_hyouji( );
ONE_KEY_DW=FALSE;
}
}
}
static void interrupt warikomi(void) {//妱傝崬傒張棟
//***********TIMER0妱傝崬傒張棟****************
if(TMR0IF==1){
TMR0=157;
if(TEN_UP==0){TEN_KEY_UP_COUNT++;}
else{ TEN_KEY_UP_COUNT = 0;}
if(TEN_KEY_UP_COUNT>=10){TEN_KEY_UP_COUNT=9;}
if(TEN_KEY_UP_COUNT==8){TEN_KEY_UP=TRUE;}
if(TEN_DW==0){TEN_KEY_DW_COUNT++;}
else{ TEN_KEY_DW_COUNT = 0;}
if(TEN_KEY_DW_COUNT>=10){TEN_KEY_DW_COUNT=9;}
if(TEN_KEY_DW_COUNT==8){TEN_KEY_DW=TRUE;}
if(ONE_UP==0){ONE_KEY_UP_COUNT++;}
else{ ONE_KEY_UP_COUNT = 0;}
if(ONE_KEY_UP_COUNT>=10){ONE_KEY_UP_COUNT=9;}
if(ONE_KEY_UP_COUNT==8){ONE_KEY_UP=TRUE;}
if(ONE_DW==0){ONE_KEY_DW_COUNT++;}
else{ ONE_KEY_DW_COUNT = 0;}
if(ONE_KEY_DW_COUNT>=10){ONE_KEY_DW_COUNT=9;}
if(ONE_KEY_DW_COUNT==8){ONE_KEY_DW=TRUE;}
TMR0IF = 0;
}
}
void lcd_hyouji(void){
unsigned char buff[12];
itoa((char *)buff, WP_POSITION,10) ;
lcd_setCursor(13, 0);
lcd_puts(" ");
lcd_setCursor(13, 0);
lcd_puts(buff);
itoa((char *)buff, WP_POSITION*0.78,10) ;
lcd_setCursor(13, 1);
lcd_puts(" ");
lcd_setCursor(13, 1);
lcd_puts(buff);
}
void syokika(void){
int i;
for(i=0;i<66;i++){
wp_ONE_DW( );
__delay_ms(2);
}
}
void wp_TEN_UP(void){
int i;
for(i=0;i<10;i++){
wp_ONE_UP( );
}
}
void wp_TEN_DW(void){
int i;
for(i=0;i<10;i++){
wp_ONE_DW( );
}
}
void wp_ONE_UP(void){
if( WP_POSITION<=128){ WP_POSITION++;}
else{ WP_POSITION=129;}
U_D = 1;
//asm("nop");
CLK = 0;
// asm("nop");
CLK = 1;
}
void wp_ONE_DW(void){
if( WP_POSITION>0){ WP_POSITION--;}
else{ WP_POSITION=0;};
//WP_POSITION--;
U_D = 0;
//asm("nop");
CLK = 0;
//asm("nop");
CLK = 1;
}
mabo 2019/06/18(Tue) 14:35 No.1693 Re: 懕侾侾乕俹倂俵
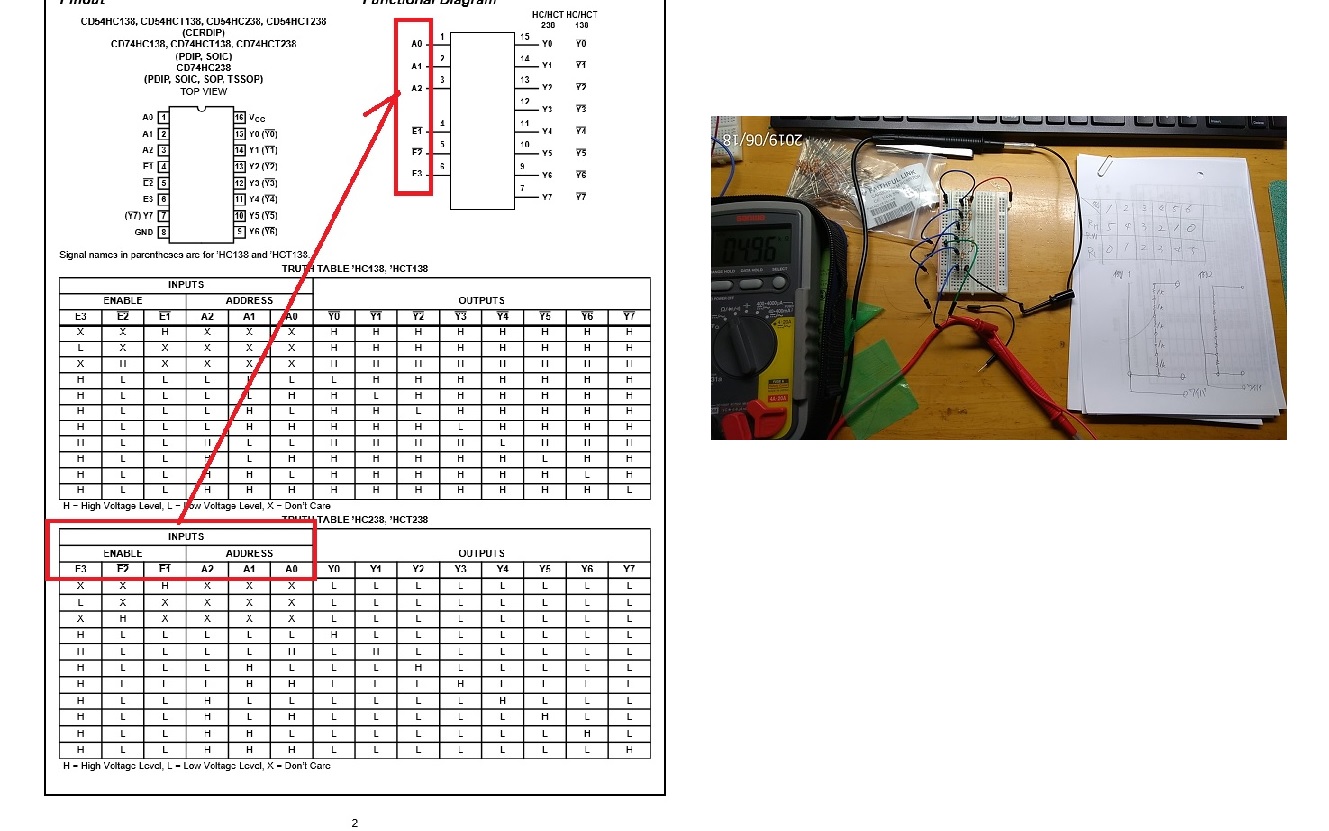 mabo偝傫偙傫偽傫偼丄
mabo偝傫偙傫偽傫偼丄捀偄偨幨恀傪傕偲偵丄捈姶傪棅傝偵丄幚尡偟傑偟偨丅
巇妡偗偑壗偲偐暘偐傝傑偟偨丅
抁棈売強偼1偐強偩偗側傫偱偡偹丅
偦偆偡傞偲丄Rh~Rw娫丄Rw~Rl娫傪暘埑偱偒傑偟偨丅
弶暔偱偡丅捈姶棅傝偱偟偨乮徫偄
僨僐乕僟IC偭偰弶傔偰尒傑偟偨丄儕儗乕戙傢傝偵側傝傑偡偹両両
Tr偼丄僩儔儞僕僗僞傾儗僀傪巊偊偽嵪傒傑偣偹丅
偁偲丄廐寧偺CD74HC238E偼丄巊偄偙側偣偨傜丄杮摉偵丄
壜曄掞峈婍偺戙傢傝偵側傝偦偆偱偡偹丅
僨乕僞僔乕僩傪尒巒傔傑偟偨丅
亜偙偺僨僐乕僟俬俠乮廐寧乯傪巊偆偲俁杮偺慄偱丆俉屄偺僩儔儞僕僗僞乕摍偺僐儞僩儘乕儖偑偱偒傞傛偆偱偡丅
偙傟偱偡偑丄僨乕僞僔乕僩傪尒傞偲丄6抂巕傪憖嶌偟側偄偲丄弌椡抂巕傪摿掕偱偒側偄偺偱偼側偄偱偟傚偆偐丠
仏仏仏仏仏仏仏仏仏仏仏
僾儘僌儔儉傪尒傑偟偨丅
傗偼傝恖偺嶌偭偨僾儘僌儔儉偼丄嶌惉幰撈摿偺曄悢昞尰傗娭悢昞尰偑偁偭偰丄側偐側偐棟夝偑恑傒傑偣傫丅
偪傚偭偲栚傪堷偄偨偺偼丄僞僀儅乕0妱崬傒丅
僞僀儅乕侽傪偮偐偭偰丄僇僂儞僩偝偣丄僇僂儞僩傾僢僾偟偨偲偒偵丄
僀儞僞乕儔僢僾娭悢傪偝偣傞偲偄偆巇妡偗偱偡偹丄嶲峫彂傪尒捈偟傑偟偨丅
愜偵怗傟壗搙傕尒偰妎偊傞偭偰姶偠偱偡丅
偱丄
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
偙偺丄PIC偺揹尮ON偺1昩埲撪偵丄AD5220偑婲摦偝偣傞偲偄偆巇妡偱偡偑丄
僀儞僞乕儔僢僾娭悢偵丄f(TEN_UP==0){TEN_KEY_UP_COUNT++;}丂丂偙偺傛偆側丄摍乆偺彂偒崬傒偑偁傞偺偱丄
RB2偑L偵側偭偨傜丄丄丄儃僞儞偑墴偝傟偨偲偄偆姶偠偐側丄
偙偆偄偭偨丄僀儞僞乕儔僢僾娭悢偑廔偊偰丄壓婰偺delay__ms(500)2夞偑棙偄偰丄
5220偑摦嶌奐巒偭偰偄偆偙偲偵側傞偺偱偟傚偆偐丠
丂丂丂婰
TMR0=157;
TMR0IF=0;
OPTION_REG=0b000000101;//2019-5-29曄峏
TMR0IE = 1;//僞僀儅乕0妱傝崬傒敪惗嫋壜
GIE= 1;//妱傝崬傒慡懱偺嫋壜
__delay_ms(500);
__delay_ms(500);
仏仏仏仏仏仏仏仏仏仏仏仏仏仏
壜曄掞峈傪倶俋C偵姺憰偺審
mabo偝傫傕丄戝忎晇偦偆偲偄偭偰榖偟偰偔傟傞偺偱丄
庤傕偪偺壜曄掞峈婍2屄乮侾侽倠偲侾侽侽倠乯傪偮偐偭偰丄暘埑偵傛傝PIC偵揹埑傪報壜偝偣丄
AD僐儞僶乕僩偝偣偰丄LED傪敪岝偝偣偰傒傑偟偨丅
栤戣側偝偦偆偱偟偨丅
偙偺曽朄乮x9c乯傕堷偒懕偒専摙偟偰傒傑偡丅
TR 2019/06/18(Tue) 21:25 No.1694 Re: 懕侾侾乕俹倂俵
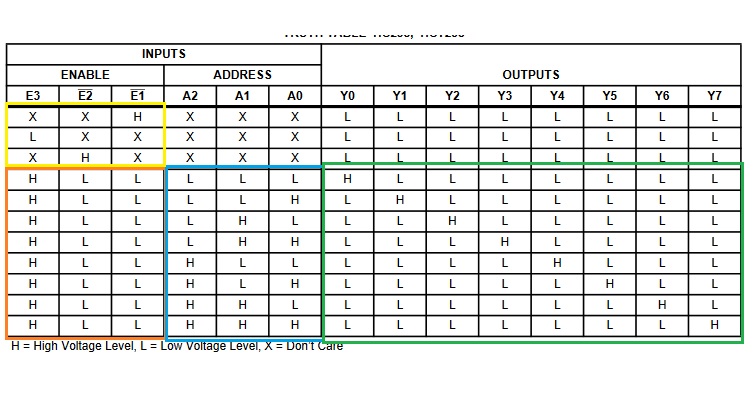 俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅俿俼偝傫丆妱傝崬傒偺張棟偼擄偟偄偙偲偼偟偰偄傑偣傫丅
俿俬俵俤俼侽偱丆係偮偺僉乕偑墴偝傟偨偙偲傪挷傋偰偄傞偩偗偱偡丅
僠儍僞儕儞僌偑偁傞偺偱丆僞僀儅乕侽偱妱傝崬傫偱丆俉夞墴偝傟偨忬懺偑妋擣偱偒偨傜丆墴偝傟偨偲敾抐偟偰傑偡丅
偦偟偰丆儊僀儞偺曽偱丆妱傝崬傒偺曽偱丆墴偝傟偨偲敾抐偝傟偰丆側偍偐偮僞僋僩僗僀僢僠偑丆棧偝傟偨帪偵丆僞僋僩僗僀僢僠偑墴偝傟偨偲嵟廔揑敾抐傪偟偰丆墴偝傟偨張棟傪偟偰傑偡丅
偦傟偐傜丆僄儞僐乕僟俬俠偱偡偑丆堦屄偩偗巊偆側傜丆
愒榞晹暘偼丆捈愙僌儔儞僪偲俆倁偵屌掕偟偰偍偗偽傛偔丆
俹俬俠偐傜丆俁杮偺慄偱丆惵榞偺怣崋傪憲傟偽丆
椢榞撪偺傛偆偵丆俉屄偺偆偪侾屄傪曄峏偱偒傑偡丅
偨偩丆暋悢屄巊偆偲偒偼丆慡晹傪俴偵偡傞応崌傕偱偰偔傞偺偱丆
墿怓晹暘偺1杮傪巊偭偰丆慡晹傪俴偵偡傞昁梫偑偱偰偔傞偺偱丆
慡晹偱俹俬俠偐傜丆係杮偺慄傪巊偄傑偡丅
侾俉僺儞偺俹俬俠傪巊偆偲丆係亊俁偺侾俀僺儞偱丆俁亊俉偱俀係屄偺僩儔儞僕僗僞摍偺僐儞僩儘乕儖偑壜擻偱偡丅
嵟戝巊偊偽侾俇僺儞巊偆俁俀屄偺僐儞僩儘乕儖偱偒傑偡偑丆
俉俉偩偲弌椡偵巊偊傞偺偑丆嵟戝侾俆僺儞偱偡偹丅
傔偄偭傁偄巊偭偰偟傑偆偲懠偺偙偲偑偱偒側偄偺偱丆侾俀僺儞埵偐側偲巚偄傑偡丅
傑偨偼丆傕偭偲僐儞僩儘乕儖偟偨偄偺偱偁傟偽丆
懌偺懡偄偺偱偟傚偆偹丅
仏仏仏捛婰仏仏仏
僾儘僌儔儉偺曽偼丆偁傑傝嵶偐偔傒側偄偱偔偩偝偄丅
偲傝偁偊偢摦偄偨偲偄偆傕偺偱丆
嵶偐偄偙偲栆媿儘僢僋偝傫偺傛偆偵偼偐傫偑偊偰偄傑偣傫丅
嵶晹偵偙偩傢傞偲丆懡暘丆弶婜壔偺張棟偺屻偱丆
妱傝崬傒偺嫋壜偱偟傚偆偹丅
mabo 2019/06/18(Tue) 22:33 No.1695 Re: 懕侾侾乕俹倂俵
>僠儍僞儕儞僌偑偁傞偺偱丆僞僀儅乕侽偱妱傝崬傫偱丆俉夞墴偝傟偨忬懺偑妋擣偱偒偨傜丆墴偝傟偨偲敾抐偟偰傑偡丅
偦偆偄偭偨棟桼偱偡偐丄僠儍僞儕儞僌懳嶔傕戝曄偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
5220偼丄偆傑偔夞偭偰偄傑偡偑丄
儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
幚尡曽朄
侟俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
亜偨偩丆暋悢屄巊偆偲偒偼丆慡晹傪俴偵偡傞応崌傕偱偰偔傞偺偱丆
椆夝偱偡丅
僒儞僉儏僂僨僗丅
偦偆偄偭偨棟桼偱偡偐丄僠儍僞儕儞僌懳嶔傕戝曄偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
5220偼丄偆傑偔夞偭偰偄傑偡偑丄
儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
幚尡曽朄
侟俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
亜偨偩丆暋悢屄巊偆偲偒偼丆慡晹傪俴偵偡傞応崌傕偱偰偔傞偺偱丆
椆夝偱偡丅
僒儞僉儏僂僨僗丅
TR 2019/06/18(Tue) 23:01 No.1696 Re: 懕侾侾乕俹倂俵
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
怴偟偄帋傒
5220偺曽丄儌僲僞儘僂偵拲暥偟傑偟偨丅
22擔偼摓拝梊掕偱偡丅
偱丄mabo偝傫偐傜嫵傢偭偨曽朄傪妶梡偟偰埲壓偺曽朄偱幚尡偟偰傒傑偡丅
偳偆偱偟傚偆偐
DC5V揹尮乣VR乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤乮掞峈婍8屄偵傛傞暘埑乯乣敪岝LED
惉岟偟偨傜丄
SEC婎斅乣儘乕僷僗乮PWM婎杮廃攇悢200H倸亖僇僢僩僆僼廃攇悢乯乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤亄Tr乮掞峈婍8屄偵傛傞暘埑偟丄ML4偺壜曄掞峈傪姺憰乯乣ML4
怴偟偄帋傒
5220偺曽丄儌僲僞儘僂偵拲暥偟傑偟偨丅
22擔偼摓拝梊掕偱偡丅
偱丄mabo偝傫偐傜嫵傢偭偨曽朄傪妶梡偟偰埲壓偺曽朄偱幚尡偟偰傒傑偡丅
偳偆偱偟傚偆偐
DC5V揹尮乣VR乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤乮掞峈婍8屄偵傛傞暘埑乯乣敪岝LED
惉岟偟偨傜丄
SEC婎斅乣儘乕僷僗乮PWM婎杮廃攇悢200H倸亖僇僢僩僆僼廃攇悢乯乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤亄Tr乮掞峈婍8屄偵傛傞暘埑偟丄ML4偺壜曄掞峈傪姺憰乯乣ML4
TR 2019/06/19(Wed) 08:05 No.1697 Re: 懕侾侾乕俹倂俵
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偵偪偼丅
亜5220偼丄偆傑偔夞偭偰偄傑偡偑丄
亜儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
偄偊丆奜晹偺俹倂俵偺怣崋偼偄傟偰側偄偺偱丆儘乕僷僗僼傿儖僞乕偼丆巊偭偰傑偣傫丅
拞壺惢俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆俙俢俆俀俀侽偵抲偒姺偊偨偩偗偱偡丅
丂俹俬俠仺仺俙俢俆俀俀侽仺仺拞壺惢僐儞僩儘乕儔仺仺儌乕僞乕
偺攝抲偱偡丅
巹偑宖嵹偟偨丆幨恀偱偡偑丆儚僀僷乕偺晹暘偵丆掞峈擖傟偰偍偄偨曽偑偄偄偐傕偱偡偹丅
堦斣抂偵堏摦偝偣偨偲偒丆抁棈偡傞偙偲偵側傞偺偱丆
掞峈擖傟偰偍偄偨曽偑埨慡偐傕偱偡偹丅
俿俼偝傫丆儌僲僞儘僂丆偄偄抣抜偟傑偡偹丅
栺丆攞偖傜偄偐側偁丅
亜1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
亜偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
堦墳丆偦偺偮傕傝偱丆擮偺偨傔俀僇強偵delay_ms偄傟傑偟偨丅
偒偄偰偄傞偐偳偆偐偼丠偱偡偗偳丅
亜5220偼丄偆傑偔夞偭偰偄傑偡偑丄
亜儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
偄偊丆奜晹偺俹倂俵偺怣崋偼偄傟偰側偄偺偱丆儘乕僷僗僼傿儖僞乕偼丆巊偭偰傑偣傫丅
拞壺惢俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆俙俢俆俀俀侽偵抲偒姺偊偨偩偗偱偡丅
丂俹俬俠仺仺俙俢俆俀俀侽仺仺拞壺惢僐儞僩儘乕儔仺仺儌乕僞乕
偺攝抲偱偡丅
巹偑宖嵹偟偨丆幨恀偱偡偑丆儚僀僷乕偺晹暘偵丆掞峈擖傟偰偍偄偨曽偑偄偄偐傕偱偡偹丅
堦斣抂偵堏摦偝偣偨偲偒丆抁棈偡傞偙偲偵側傞偺偱丆
掞峈擖傟偰偍偄偨曽偑埨慡偐傕偱偡偹丅
俿俼偝傫丆儌僲僞儘僂丆偄偄抣抜偟傑偡偹丅
栺丆攞偖傜偄偐側偁丅
亜1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
亜偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
堦墳丆偦偺偮傕傝偱丆擮偺偨傔俀僇強偵delay_ms偄傟傑偟偨丅
偒偄偰偄傞偐偳偆偐偼丠偱偡偗偳丅
mabo 2019/06/19(Wed) 12:15 No.1698
- JoyfulNote v6.02 -
++ Edited by Hamel ++