








2013-03-07 Thu
オシレータの周波数調整に使うポテンショメータのダイヤルです。きちんと,何回転したか分かるようになっています。赤の矢印の
小さな窓に回転数がでます。今は,0を示しています。また,回転
を止めるストッパーも付いています。青い矢印です。


子どもの頃の遙か記憶の中に,これと同じようなダイヤルがつ
いてた機械があって,いじった覚えがあります。中学校時代の
理科室でしょうか。もしかして,オシロスコープかなんかだったのか
もしれません。妙に,郷愁を感じる部品です。
2013-03-06 Wed
サーボ本体とオシレーターだけで,正逆回転やスピードコントロールが出来るようになりました。
結局,CW+CCW信号を入力することにしました。CN1の
1番と2番線で送ると逆回転,3番と4番で送ると正転になる
ようです。1番と2番に送るときは,3番4番には,LOWレベル
の信号を入力する記載がありますが,オープンでも大丈夫なようです。
1番2番,3番4番を切り替えスイッチにつないであります。
2013-03-04 Mon
昨日,頼んでおいた部品(ツイストペアケーブル等)が届いたので,コネクターに結線し,信号をサーボのアンプにいれて
みました。結線したのは,
1番
2番
3番(オープン)
4番
36番
です。3番は,コネクターの方は,結線しましたが,信号出力の
オシレーターの方は,結線しませんでした。2番,4番,36番
は,オシレーターのアースに落としました。
電源を入れて,信号をいれると,勢いよく回って,速度オーバ
ーで,エラー出ました。パラメーターをあれこれいじってると,
全然回らなくなりましたが,どこが悪かったのかわかりません
が,しばらくいじってるとスムーズに回るようになりました。
オシレータ-は,1の設定では,周波数が高過ぎるようで,
100の設定で,300回転から4900回転までスムーズに
回るようになりました。サーボアンプには,電子ギアの設定
がるので,もしかして,この設定をいじると,入力信号の周波
数をいじらなくてもいいのかもしれません。結局100kΩの
可変抵抗を使いましたが,抵抗を回しきっても,300回転
ぐらいでまわるので,もう少し大きい抵抗がいいのかもし
れません。このままでは不便なので,STOPのスイッチと,
逆回転にするスイッチと,サーボonのスイッチをつけます。
3番の信号線を,HIGHTにすると逆回転になるようです。
HAIGHTにするには,何ボルトの信号を入力するのか,
分からないので,もう少し研究です。
サーボonにするには,
13番---24V入力
14番---オープン
にする必要があるので,24Vの電源がいります。
2013-03-01 Fri
秋月のオシレータですが,今のところどのくらいの周波数をサーボにいれてあげれば良いのか,よく分かりません。
きっと,規格というか,決まりがあるのでしょうが,ちょっと調
べようがないので,トライアンドエラーです。
ところで,オシレータにつける抵抗ですが,どのくらいのもの
を用いればいいのでしょうか。きっちりと計算しないで,100k
Ωのものをたのんでしましましたが,ちょっと不安になってきま
した。オシレーターの取説に書いてある式で,計算してみます。
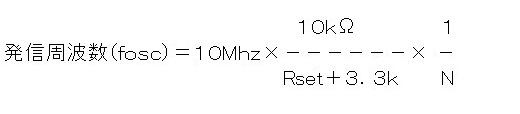
で計算できるとあります。Nは分周比で,6番端子の接続によって
1,10,100に変更できます。小さい方が精度が良いとあるので,
1で計算してみると,
Rset=0で(分数=約3) 30Mhz
Rset=1.7KΩで(分数=2) 20Mhz
Rset=6.7KΩで(分数=1) 10Mhz
Rset=16.7KΩで(分数=1/2) 5Mhz
Rset=96.7KΩで(分数=1/10) 1Mhz
Rset=196.7kΩで(分数=1/20) 500Khz
になります。分周比1での推奨周波数は500Khz以上とあり
ますから,30Mhzから500khzで使うには,約200KΩの可変
抵抗を使えばいいことが分かります。それにしてもこうやって計
算してみると,周波数を小さくするには,大きな抵抗が必要なん
ですね。もし,5Mhz~30Mhzで可変するなら,約20kΩの可変
抵抗を使えば大丈夫なことになります。
マルツで販売されているポテンショメータものの最大は100kΩ
でした。それ以上のものが置いてないのは,この計算のとも関係
があるような気がします。
固定抵抗とポテンショメータの組み合わせで,切り替えた方が
実用的な気がします。もし,5Mhz以上でサーボが動くなら,
20kΩのポテンショメータを使った方が,レスポンスがよくなり
そうです。
2013-02-28 Thu
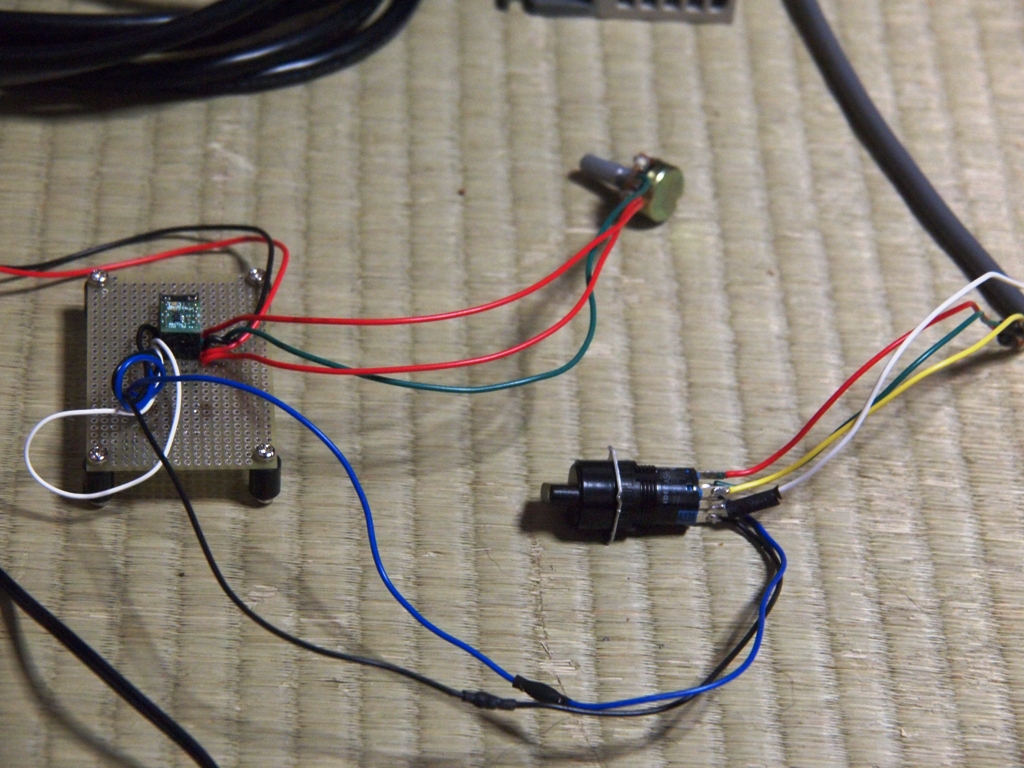
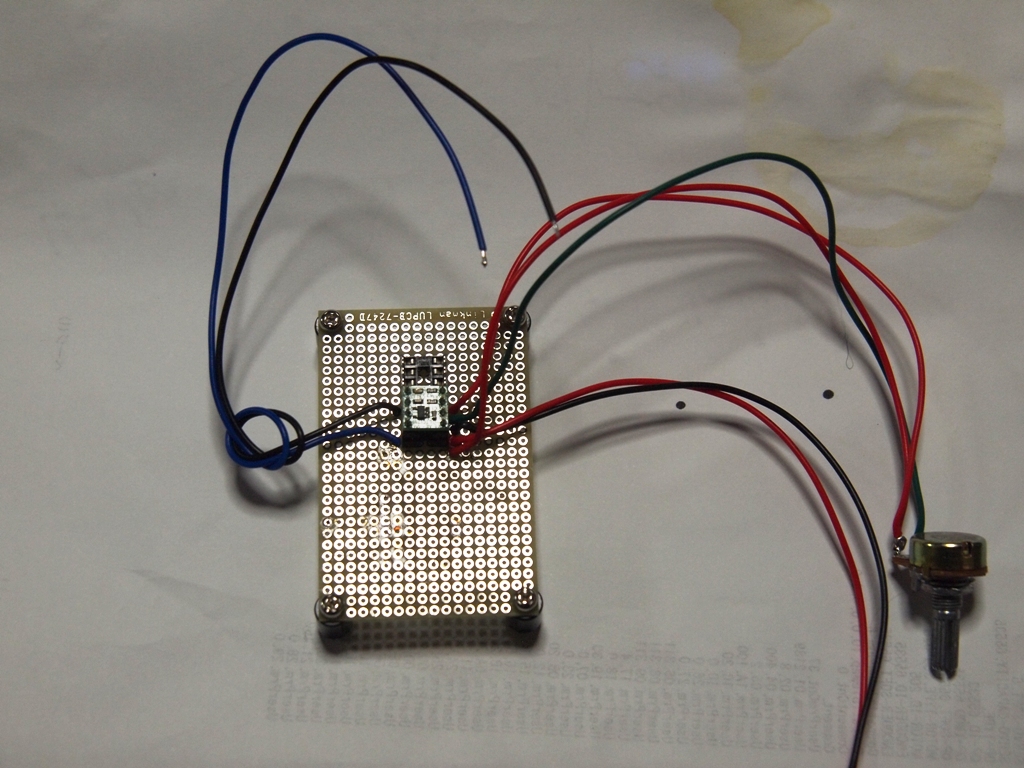
結線の部品がまだこないので,あり合わせの基板に,オシレータを組み込んでみました。といっても,写真の通りで,あ
り合わせのICソケットに差し込んで,電源,信号,ボリューム
の配線をしただけです。
このオシレータの信号を秋月のオシロスコープにいれて見ま
した。4000円ぐらいのキットのオシロです。
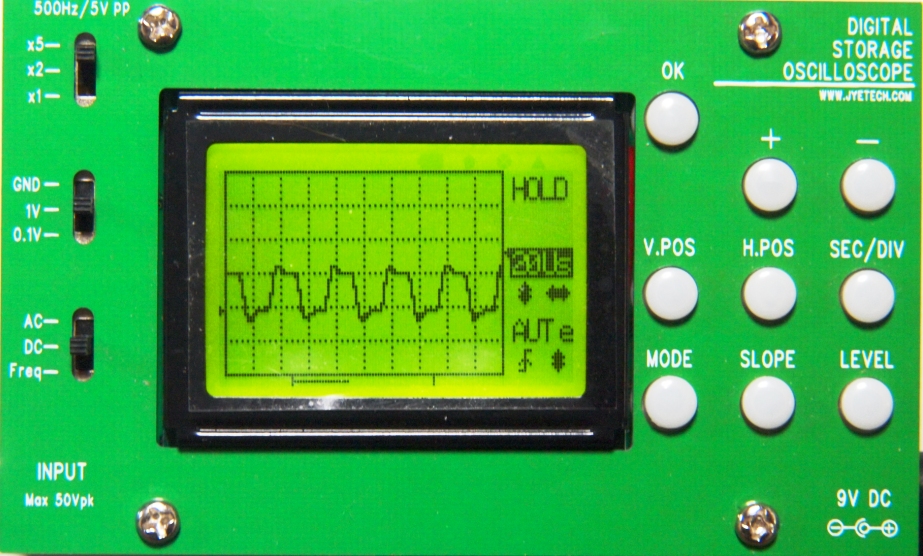
調整が非常に微妙で,ほんの少しボリュームを動かしただけ
で,大きく周波数が変化してしまいます。3枚目の写真では,
オシロスコープのの能力(分解能?)をこえて,細部がつぶれ
ています。きれいなパルスではないようですが,これで,サー
ボが動けば,うれしいです。
オシレーターの作り方・取説には,外付けのボリュームは,精
密可変抵抗を使うように指示がありました。結線の部品と一緒
に頼んである。精密可変抵抗(ポテンショメーター)に付け替え
てみて,また,波形を見てみたいと思います。
ちなみに,サーボのメーカーの直販サイトにある,スピード制御
に使う精密可変抵抗は,7000円弱と結構な値段です。

抵抗値はどのくらいあるのか,詳細は,分かりませんが,
電圧の可変に使うようです。
2013-02-27 Wed
PCからの運転ができるようになったので,今日は,ユーザー設定をいろいろ変化させて動かしていました。
次は,本体だけで,制御できるように外部の回路を組む準備です。
基本的には,CN1の信号入力端子から,パルスを与えてやればいいよう
です。
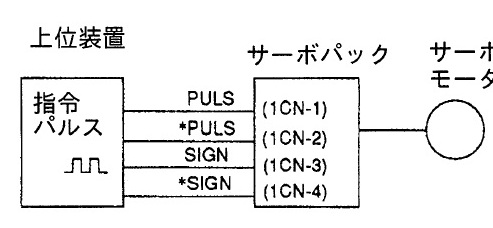
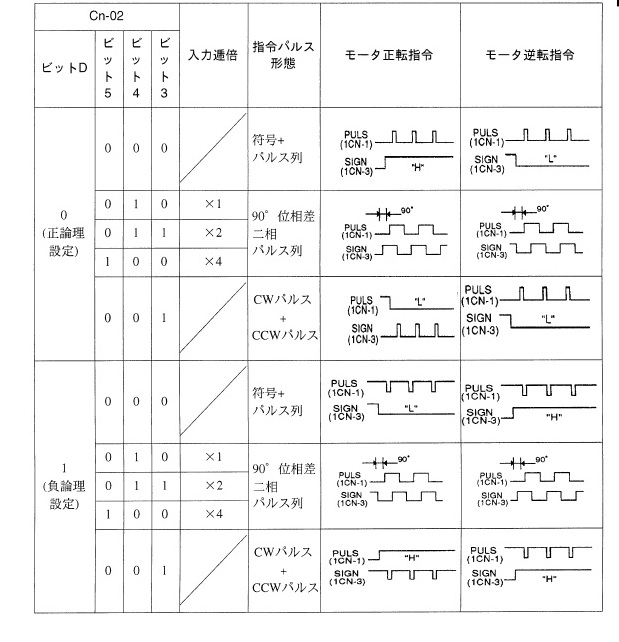
CN1の1番の端子と3番の端子に信号を入力します。
この信号の種類は,次の設定で,変更できます。接続する上位機種
によって変更すると書いてあります。
コネクターが本体に附属していましたので,コネクターに結線して,これ
から準備する自作外部コントローラーに接続できるようにします。ピンア
サインも分からなかったのですが,マニュアルに載ってました。自作と言
ってもNo1で書いた秋月電子のオシレーターを使う予定ですので,結線
して,必要なスイッチ等をつけるだけです。
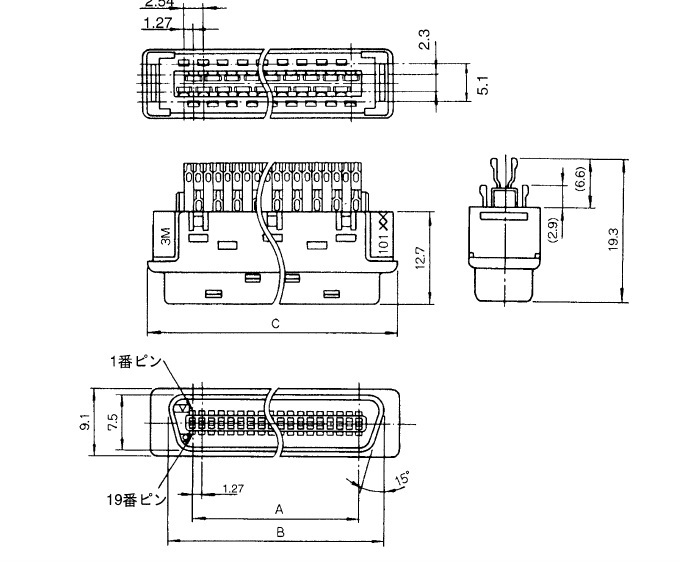
このピンの番号は,約束事みたいで,どれでも同じなのでしょうね。
ピン番号も分からない素人ですから,無謀な挑戦なんでしょうね。(笑)
2013-02-27 Wed
注文しておいたサーボモーターとアンプが届いたので,あれこれやってみました。
モーターと本体等必要なケーブルを接続して電源を入れて
見ると,しばらくぶるぶると異常と思える音をだして,止まって
しまいました。モニターランプを見て見ると,アラームの赤い
LEDが付いています。
新古品を購入したので,設定は,工場出荷時のはずですが,
設定を変えないとだめなようです。しばし,故障かとも思いました
が,後に,設定を変えると大丈夫になりました。
他のメーカーの機種は分かりませんが,この機種は,PCと接続
することによって(RS232C経由)設定の変更,試運転ができます。
このソフトで,まず,サーボonの設定の変更をしました。
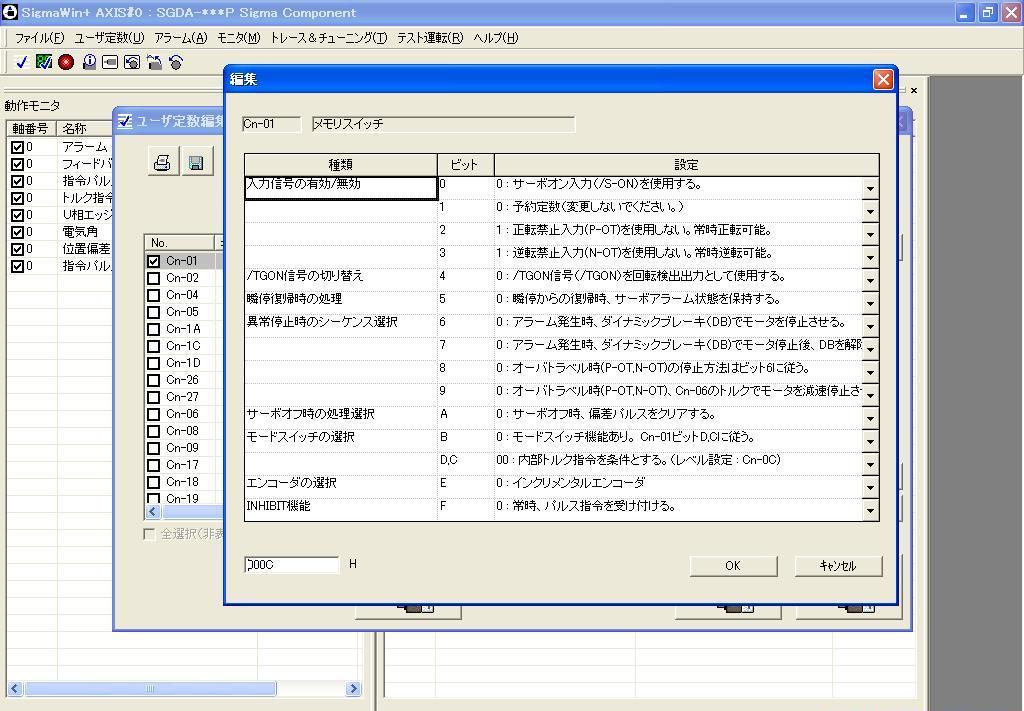
一番最初の項目の設定が,電源投入時にすぐにモーターに通電する
設定になてました。これを,ON OFFできる設定にしました。
その後,ユーザー定数を適当にあれこれいじってると,エラーが
出なくなり,JOGモードというPCからの信号で,テスト運転ができる
ようになりました。
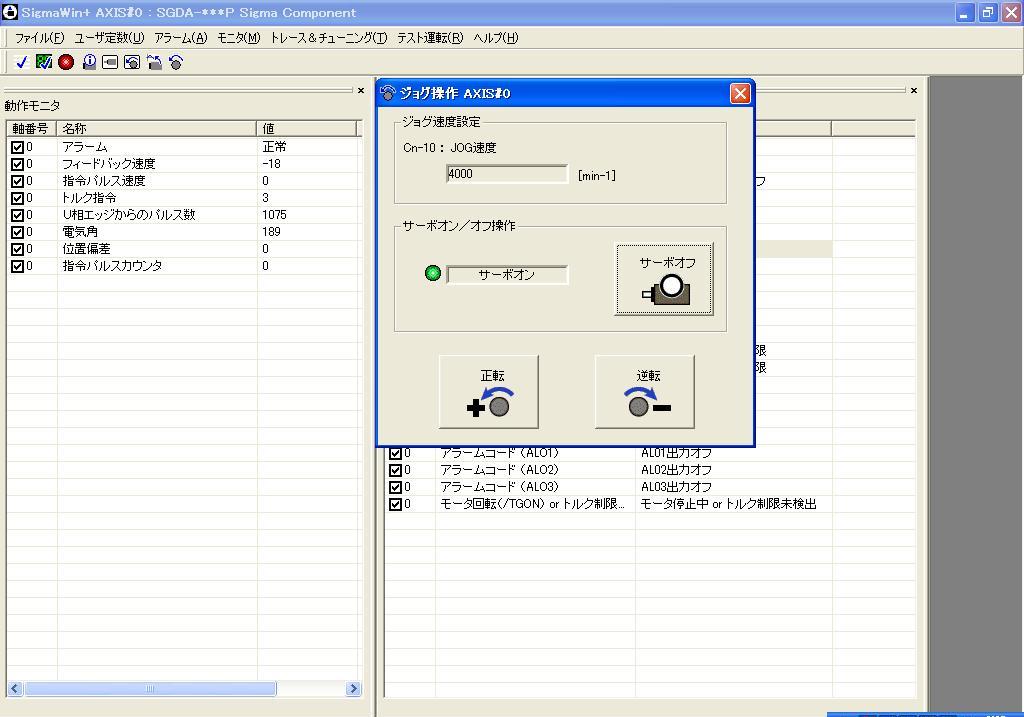
JOG運転の設定を変えて,4000回転で回転させてみました。
定格回転が3000回転ですので,4000回転で止めました。
後は,外部から,信号をいれて回転をコントロールできるか
です。
2013-02-26 Tue
たいしたことは,やって内のですが,我が家のフライス盤の力不足を感じるようになりました。
諸兄のHPを見ると,三相モーターやACサーボ-モーター等
に換装している記事をよく見ます。
オリジナルのブラシモーターは,PWMでスピードコントロール
しているようで,低速になると必然的にトルクも落ちてしまう
ような気がします。この点,インバーターによる駆動や,AC
サーボモーターは,有利なようです。
私も,ACサーボモーターにしてみたくなり,いろいろ資料を
漁りながら,勉強しています。
諸兄のHPには,その様子が詳しく書かれていますが,素人
の私に分かるように,配線のことやら設定のことなどまで,
細かくは書かれていません。あれこれやりながら,その家庭
を忘れないように,このブログに記録していこうと思います。
とりあえず,ACサーボモーターが連続回転することを目標
にやりたいと思って,ます。
模型のブラシレスモーターもそうですが,昔のマブチモーター
のように,電池のプラスマイナスをモーターにつなげばいい
訳ではなく,周辺機器の準備やら,設定がいろいろいるよう
です。
まず大事な物が,モーターを動かすための基準になるパルス
を発生させるものか,プラスマイナスの電圧を発生させる装置
が必要なようです。安川電機のサーボモーターのアンプでは,
型番の最後がPのもは前者,Sの物は後者で,コントロールす
るようです。
私が中古で購入したものものは,パルスが必要なものでした。
ということで,諸兄のHPに書いてあるように,秋月電子から
「1kHz~30MHzオシレーターLTC1799モジュール基板」と
言う物を購入しました。本体は,600円で,この基板にボリュ
ームつけて,5vの電源を入れれば,パルスを取り出せるよ
うです。本体は,基板といっても,大きさは,1cm角の正方
形で思ったより小さかったです。ボリュームと電源をつけて,
同じく秋月電子で購入した安いオシロスコープに信号をいれ
て見てみたいと思います。

2013-02-08 Fri
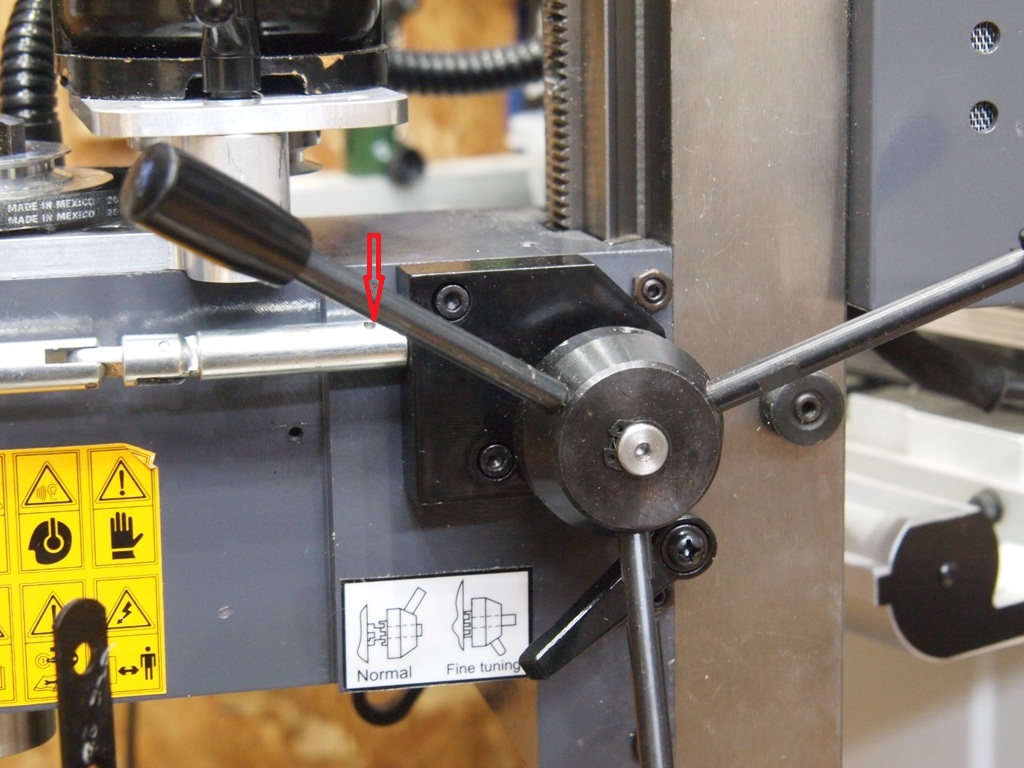
だんだん元の形状をとどめなくなってきました。ベルトドライブにしてから,今回は,テンションスプリングをエアー(ガス)スプリングに交換し
ました。

矢印でしめした,赤の角度が90度より狭くなっています。

このキットは,どこ製かは書いてありませんでしたが,取り付けてみると
ヘッド取り付け部分のねじ切りが直角でないためか,やや前に傾いてい
ます。練習がてら後日,この部分を作り直してみようかと思ってます。
エアースプリングにしてから,可動範囲が,下方にやや広がりました。
前回部品破損の原因となった下方への移動も問題なくできますが,
気をつけないと,下がりすぎてしまいます。
ベルトドライブにして,そんなに使ってはいませんが,ベルトがいたん
できたので,同じ規格のベルトに交換しました。
6mm×330mmのベルトがなくて,やっと同じサイズのタイミング
ベルトをモノタロウで探して交換しました。ミシンのベルトのようです。

バンドー化学のバンゴランVベルトというベルトです。
このベルトに交換して,音が静かになったような気がします。
2013-02-05 Tue
部品が届いたので,だめになった部品交換しました。写真が,だめになった部品です。

次の写真が,交換済みの写真です。壊れた部品には,
連結部分を止めるのにノックピンがさせるように穴があいてますが,
取り寄せた部品には,ノックピンの穴があいていませんでした。
赤矢印の部分です。
元々の部品には,穴が開いてますが,取り替えた部品にな
穴があいてないので,新しい部品を今までの所に,圧入
といっても,木槌で,たたいていれただけです。
TOP PAGE △