







2012-10-21 Sun
とりあえず,だいたいのイメージを図面にしてみました。

緑が基盤で,黒が,レンズの付いているボックスで,暗い
灰色がレンズです。
図面にはいれていませんが,オレンジのながナットで,中心の
マウント部分の傾きを調整して,中心を合わせる予定です。
大きな形のバネが手に入らないようなので,オレンジのナット
の上の部分に小径のバネをいれて,支える予定です。
分解して,採寸して書きました。灰色の部分は,アルミの予定です。
次の写真が分解して,基盤を取り出したところです。

基盤部分の拡大です。

この基板を組み込むための台座をCNCで作ります。
2012-10-19 Fri
過日,ドリルプレスやCNCで使うため,原点カメラなるものを購入しました。結構な値段がしましたが,届いてみてびっ
くりでした。どう見ても,商品にはほど遠いものでした。

おまけに,調整を繰り返していたら,イモネジの一つが
きかなくなりました。購入もとに問い合わせをすると,有料
修理とのこと。とんでもない買い物をしました。
心ある会社なら,きっと,このくらいの修理も無料で行うんでしょうね。
結局満足いかないので,アルミを削って,自分で作ることにしました。
経過を掲載します。
製造中止になってましたが,WEBCAMを安く手に入れました。
BUFFALOのBWC-30L01というカメラです。1000円ちょっとで
買いました。

2012-10-03 Wed
使わなくなったWIN2000のふるいPCをあれこれいじってます。とっくの昔にサポートは終わってますので,ちょっと不便です。
特に,無線LANのクライアントマネージャをインストールしようと
思ったら,対応がIE5.5以降ということで,使えないしまつ。
それでも,IE5,5の本体を置いてあるサイトがあったので,
そこから,DL後,バージョンアップして,クライアントマネージャ
をインストールできました。
2012-09-21 Fri
使わなくなったwindow2000の古いノートで,なんとMACH3が動きました。
HPのNX6210はもしかして,パラレルポートの不具合があった
のかもしれません。
不具合を確かめるべく,ふるいプリンターを引っ張りだしました
が,プリンターのケーブルがありません。
パラレルポートは時代の遺物なんですねえ。
2012-09-19 Wed
オアリジナルマインドさんより購入したステッピングモーターと,ドライバーの試運転(動作確認)ができました。当初,
パラレルポートの付いているノートで確認をしましたが,
本体のパラレルポートでも,PCカードの増設ポートでも
うまく動きませんでした。結局,デスクトップのPCでやっと
うまく動きました。
今回購入したステッピングモーターは,最大3Aの電流を消費
するので,後で,ドライバーの設定を変える必要があります。
同じノートで,ドライバーを動かしてる方もいるのに,残念です。
2012-09-17 Mon
木製のCNCを作るべく,部品を集めています。ステッピングモーター,コントローラーは,オアリジナルマインド
より購入しました。今は,ボールねじや台形ねじをいろいろあさって
ます。アメリカのEBAYには,ボールねじがごろごろ売ってますの
で,うらやましい限りですが,その多くは日本製のようです。
2012-09-03 Mon
あれこれやってましたが,やっと,半田ごてタイマーが組み上がりました。昨日だいたいできたのですが,RA0の端子
とRA7の端子が思った動作をしてくれず,あれこれ,やって
ましたが,原因が分かりました。RA0はイモ半田で,導通し
ていませんでした。RA7は,ショートしていいて,常に5Vが
でている状態でした。当初の予定では,自己保持リレーで,
自分自身お電源も切る予定でしたが,あれこれやりました
が,うまく行きませんでした。とりあえず完成ということで,
後日,2回路のリレーを使って,再挑戦したいと思います。
今までのタイマーと違って,残り時間が液晶表示で,分か
こと,任意の時間が設定できること,残り時間がなくなると,
一分だけ延長され,その間にスタートボタンを押すと,設定
した時間だけ,繰り返せます。一分が過ぎると,半田ごての
電源を切って,0の表示に戻ります。

青の液晶表示がおしゃれだと思ってます。今のところ,
一番右のスイッチは,ただの飾りです。
2012-08-21 Tue
冗長なプログラムですが,Cのプログラムです。PICに密接した設定は,本の丸写しです。
このプログラムは,タイムアップすると,無限ループに入る
ようにしています。本番では,ここを,変更して,自分自身
の電源を切るようにします。アセンブラーでは,各種フラグを
ビット操作でしていますが,本プログラムでは,贅沢にフラグ
にいint型の整数を使ってます。データーメモリに余裕がある
のでこの方がすっきりします。ただ,計算スピードやら,コンパイル
後のメモリ等については,よく分かりません。
PICに密接した設定や,割り込みの処理のプログラムがまだ,
よく分からないところがありますが,その他は,PC用のプログラム
とあんまり変わりません。
/******************************************
99タイマーテスト
********************************************/
#include <pic.h>
__CONFIG(UNPROTECT & LVPDIS & BOREN & MCLRDIS & PWRTEN & WDTDIS & INTIO);
int sw3;
int sw2;
int sw1;
int sw3_data;
int sw2_data;
int sw1_data;
int sw12_data;
int sec1_data;
int sec10_data;
int min1_data;
int min10_data;
int count;
int count1;
int start_stop;
int entyou;
int buzzer;
int dengen;
int sec1_data_w;
int sec10_data_w;
int min1_data_w;
int min10_data_w;
void count_up(void);
void InitInterTimer0 (void);
void WaitTime (int cnt);
void datahozon(void);
void datasaisettei(void);
void main(void){
CMCON=0X07; //1,2,17,18
PORTA=0xFF;
PORTB=0xFF;
TRISA=0x1C;
TRISB=0x00;
RA0=0;//ブザーoff
RA1=0;//電源オフ
RA7=0;//本体操作
sec1_data=0;
sec10_data=0;
min1_data=0;
min10_data=0;
sw3=1;
sw2=1;
sw1=1;
sw3_data=1;
sw2_data=1;
sw1_data=1;
sw12_data=1;
min1_data_w=min1_data;
min10_data_w=min10_data;
start_stop=0;//初期値ストップ
buzzer=0;
dengen=0;
entyou=0;
// タイマ0割込み設定関数の呼び出し
InitInterTimer0();
// 割込み全体の許可
GIE = 1;
for( ; ; ){
//キー入力チェック1
if(RA2==0){
sw3=0;// スタートストップ
}
if(RA3==0){
sw2=0;//SW2 一分
}
if(RA4==0){
sw1=0;//SW1十分
}
//LED表示
PORTB=0xf0 | sec1_data_w;//秒1位表示
RB4=0;
_delay(250);
RB4=1;
PORTB=0xf0 | sec10_data_w;//秒10位表示
RB5=0;
_delay(250);
RB5=1;
PORTB=0xf0 | min1_data_w;//分1位表示
RB6=0;
_delay(250);
RB6=1;
PORTB=0xf0 | min10_data_w;//分10位表示
RB7=0;
_delay(250);
RB7=1;
//キー入力チェック2
//スタートストップチェック
if(RA2==0){
if(sw3==0){
if(sw3_data==1){
sw3_data=0;
if(start_stop==1){
start_stop=0;
}
else{
if(min1_data_w>0 || min10_data_w>0){
datahozon();
}
start_stop=1;
buzzer=0;
}
}
}
}
else{
sw3_data=1;
sw3=1;
}
//**************************************
//1分操作
if(RA3==0){
if(sw2==0){
if(sw2_data==1){
sw2_data=0;
if(start_stop==0){
sec1_data_w=0;
sec10_data_w=0;
if(min1_data_w<9){
min1_data_w++;
}
else{
min1_data_w=0;
}
}
}
}
}
else{
sw2_data=1;
sw2=1;
}
//**************************************
//10分操作
if(RA4==0){
if(sw1==0){
if(sw1_data==1){
sw1_data=0;
if(start_stop==0){
sec1_data_w=0;
sec10_data_w=0;
if(min10_data_w<9){
min10_data_w++;
}
else{
min10_data_w=0;
}
}
}
}
}
else{
sw1_data=1;
sw1=1;
}
//****************************************
//同時操作
if(sw2_data==0){
if(sw1_data==0){
if(sw12_data==1){
sw12_data=0;
if(start_stop==0){
min1_data_w=0;
min10_data_w=0;
}
}
}
else{
sw12_data=1;
}
}
else{
sw12_data=1;
sw1=1;
sw2=1;
}
//*******ブザーオンオフ*********************************
if(buzzer==1){
if(min1_data_w==0 && min10_data_w==0 && sec10_data_w==0 && sec1_data_w==0){
if(RA0==0){RA0=1;}
}
if(min1_data_w>0 || min10_data_w>0 || sec10_data_w>0 || sec1_data_w>0){
if(RA1==0){RA1=1;}//電源オン
}
}
if(buzzer==0){
if(RA0==1){
RA0=0;
entyou=0;
sec1_data_w=0;
sec10_data_w=0;
datasaisettei();
}
}
}
}
// 割込みサービスルーチン
static void interrupt isr(){
//****************延長処理*********************
if(entyou==1){
if(count<1950){
count++;
}
else{
if(sec1_data_w>0){
sec1_data_w--;
buzzer=1;
count=0;
}
else{
if(sec10_data_w>0){
sec10_data_w--;
sec1_data_w=9;
count=0;
}
else{
RA7=1;//******************本体電源もオフ*********************
for( ; ; ){ }
}
}
}
}
//***************カウントダウン**************
if(start_stop==1){
if(count<1950){
count++;
}
else{
if(sec1_data_w>0){
sec1_data_w--;
buzzer=1;
count=0;
}
else{
if(sec10_data_w>0){
sec10_data_w--;
sec1_data_w=9;
count=0;
}
else{
if(min1_data_w>0){
min1_data_w--;
sec10_data_w=5;
sec1_data_w=9;
count=0;
}
else{
if(min10_data_w>0){
min10_data_w--;
min1_data_w=9;
sec1_data_w=9;
sec10_data_w=5;
count=0;
}
else{
count=0;
entyou=1;
start_stop=0;
sec1_data_w=9;
sec10_data_w=5;
}
}
}
}
}
}
//***********************カウントダウン終了********************
// タイマ0割込みフラグをクリア
T0IF = 0;
}
void InitInterTimer0 (void){
// クロック源を内部クロックに設定
T0CS = 0;
// プリスケーラをタイマ0に割り当て
PSA = 0;
// プリスケーラ値を2に設定
PS2 = 0;
PS1 = 0;
PS0 = 0;
// TMR0レジスタをクリア
TMR0 = 0x00;
// タイマ0割込みフラグをクリア
T0IF = 0;
// タイマ0割込みの許可
T0IE = 1;
}
// 待ち時間関数の呼び出し
void WaitTime (int cnt){
while(cnt > 0){
cnt--;}
}
void datahozon(void){
min1_data=min1_data_w;
min10_data=min10_data_w;
}
void datasaisettei(void){
min1_data_w=min1_data;
min10_data_w=min10_data;
}
2012-08-21 Tue
HPにのっていた99タイマーをちょっと改良して,半田ごてタイマーを作る予定でいましたが,16F84Aは端子が,どうしても2
本たりないで,上位互換である,16F627Aに変更して,作る
ことにしました。もう少し調べれば,16F627Aよりもメモリーが
が多くて,安いPICがあったのですが,失敗しました。これも,
身銭を切ったお勉強です。
テスト基盤,

でのプログラムの作成もやっと完成しそうです。今まで使って
いた半田ごてタイマーと違うところは,使える時間を99分まで
の間で設定できることです。
(時間の設定)→(カウントダウン)→
(ブザー)→(一分以内にスタートボタンを押す)
→(最初の設定時間に戻る)→(カウントダウン)
を繰り返します。一分以内にボタンを押さないと,本体
も含めて電源が切れるようになります。
当初 アセンブラー(HPにあったもの)をちょっと改良
するつもりでしたが,プログラムの半分ぐらいは,意味
が分かったのですが,面倒なので,フリーのCコンパイ
ラーで,くみなおしました。プログラムの大きさが心配
でしたが,PICの容量の85%ぐらいでおさまりました。
2012-08-05 Sun
PICを使ったタイマーを作ってます。やっと7セグメントLEDの表示部分だけが出来ました。テスト点灯で,一カ所だけ,光ら
せています。
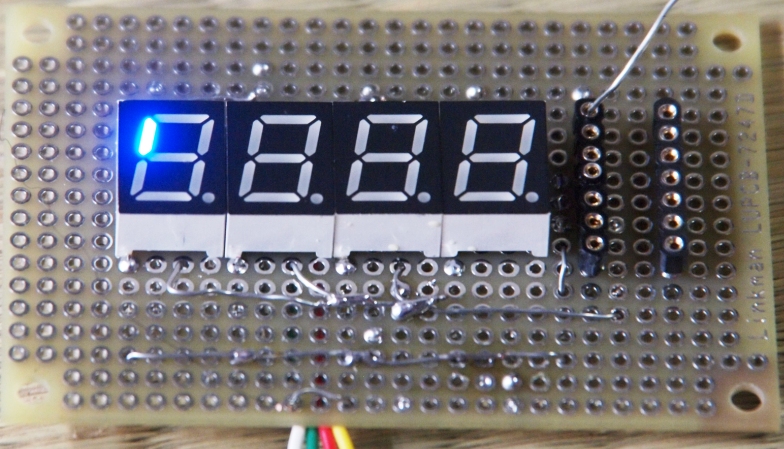
このタイマーのハードにSSRを組み込んで,半田ごてタイマー
にしようと思います。
ハードの追加は,PIC16F84の開いている端子にSSRを接続
するだけなので,それほど難しくはありませんが,プログラム
の変更が大変だろうなあ。
TOP PAGE △