








2019-09-15 Sun
PIXONのPX-910というワイヤレスシリーズのセンサーライトを便利に使ってました。

しかし,一週間ほど前に突然,動作しなくなりました。
メーカーに修理を依頼しようと思い連絡しましたが,代替え品が
ないため修理不可能ということで,もしやと思い,◯オクをみると,
中古ですが,同じものが二つだされていました。
二つとも落札しようと思いましたが,一つしか落札できません
でした。
早速手元に届いた落札品をいままでのものと入れ替えてみまし
たが動作しませんでした。
もしやと思い,今まで使っていたもののセンサーを,落札品の
センサーと交換してみました。見事に動作しましたので,
落札品の基盤を今まで使っていたものと換装しました。
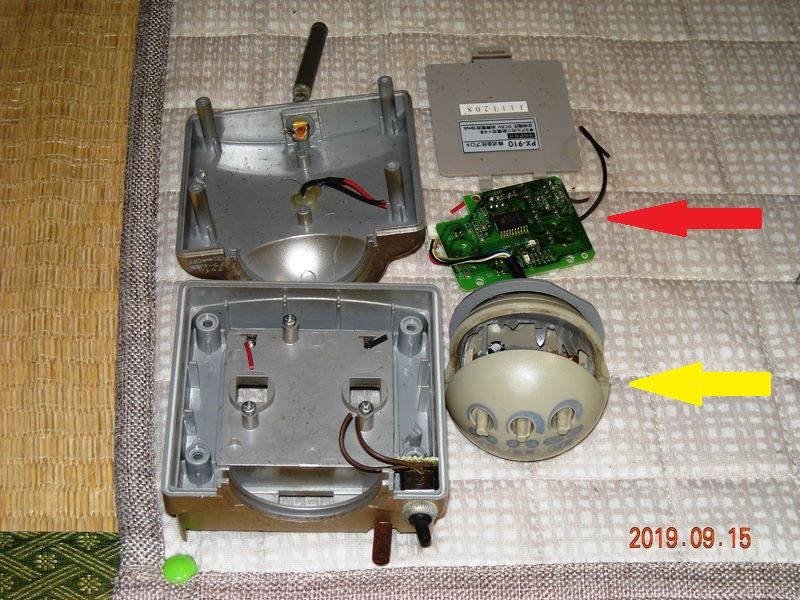
赤矢印が動作しない基盤で,黄色矢印が言うまでもなくセンサー
部分です。
センサー部分は,表面のカバーが劣化しひびが入って,そこから,
雨水が回路のトリマー部分にかかり,動作しなくなったように
思います。

写真は,カバーが欠けています分解したためで,分解する前は,
経年劣化でひびが入っただけでした。

右側のものが,動作するようになったものです。
今までものの基盤は,アンテナ部分から水漏れしたのか,
所々錆がでていましたので,落札品の基盤を使いたかったの
ですが動作しなかったので,今まで基盤の錆を気持ち落として
利用することにしました。
もし,動作しなかったら,センサー部分を◯月で購入して,
小さなリモコンスイッチがあるので,その基盤を使い,簡単
なプログラム作って,動作させようかなと思いましたが,
大丈夫だったので,ひとまず安心です。
ただ,新しいものには,直接雨水等がかからないように,
アクリル等で,カバーを作ろうかと思います。
2019-09-11 Wed
あれこれやってましたが,ほぼ完成です。
実際の運用はまだしてませんが,トランス2個なので,能力的には,
十分なような気がします。
ただ,2個でも,スティック(アーク棒)を使ってやってみると,
思うようにスパークが持続しませんでした。
あとは,フットスイッチが届けば,いろいろやってみようと思います。
フットスイッチで,
遅延タイマー
をコントロールして,設定の時間だけ,通電できるようにします。
フットスイッチは,送料無料を選んだので,到着するまで,
時間がかかるようです。
2019-09-01 Sun
MOTにそれぞれ,2次コイルを巻いて,電流電圧を測ってみました。
次の写真は,14sqの線を2回ほどまいたMOTです。
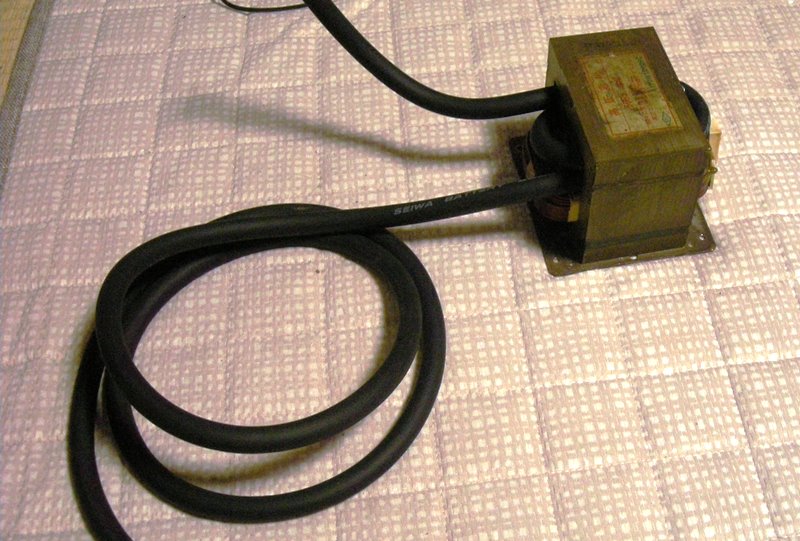
電圧は,約1.5Vで,先端を針金で短絡させて電流を測ると,
約 30Aでした。短絡した針金は,赤くなるものの,そのままでした。
次の写真は,

8sqの線を10回ほどまいだのもです。14sqの5倍ほどの回数です。
同じように計ると 電圧は,約5倍の7.5Vでした。短絡して測定した
電流は,約100Aでした。
短絡した針金は,あっとういう間に溶けて切断しました。それで,
電流は上がりきる前に測定が終了したのかもしれません。
二つ使って溶接器を作るための実験でしたが,一つでは,電流
が足りないよう気がしました。二つ使うと,十分なスポット溶接
ができるのかなと思いました。
まあ,実験するまでもなく,理想トランスと仮定すると,計算で
出せるのでしょうが。そういえば,電気工事士の試験問題
に出てきたような記憶も・・・・・・。
2019-08-27 Tue
ネットを見ていたら,前から気になっていたスポット溶接器の制作の記事が目にとまりました。
早速,部品を調達して,作ろうが思います。
部品といっても,中古の電子レンジを購入すればいいのですが,
重いため,送料が2000円近くかかってしまいます。
ちなみに,◯オクで,100円と80円で落札しましたが,近くの
県からでも,送料が2000円と1600円くだいですので,
4000円近くかかりました。
おそるそる電子レンジ分解して,MOTをとりだしました。
ちなみに,二つの電子レンジの高圧コンデンサーは,放電用
の抵抗が組み込まれているものでしたが,極力触らないよう
に気をつけました。
という訳で,強は,MOTの2次コイルをはずしました。
諸先輩がやっておられることなのですが一応写真だけ。




4つあると普通のアーク溶接ができるようですが,とりあえず,二つ
で,作って見ます。
2019-08-19 Mon
タナカのチェーンソーのプライマリーポンプが劣化して,亀裂が入りました。

早速交換しようと思い,近くのHCに行きましたが,値段が高いので,
買うのを止めました。いろいろ調べて見ると,同じ純正のものでも,
値段にばらつきがあります。
近くのHC 1440円+税
実家近くのHC 1160円+税
amazon 2299円
でした。
レビューを読むと製造中止のコメントも見られるのですが,
社外品?だと安いです。
ちなみに以前友人の刈払機のものを交換するときに買ったお店
では,同等品が
590円
でした。
どうしようとおもいましたが,ダメ元で,amazonの安い物も注文
しました。
これ
5個で,598円+100円(送料)でした。
まあ,これも多分,中華製でしょうかね。どの程度保存できるのか
分かりませんが,残りは,予備として,とっておきます。
うまく使えるといいのですが。
2019-07-14 Sun
過日,いろいろ試すのに◯mazonkから,PWM信号発生器を購入し,便利に使ってました。
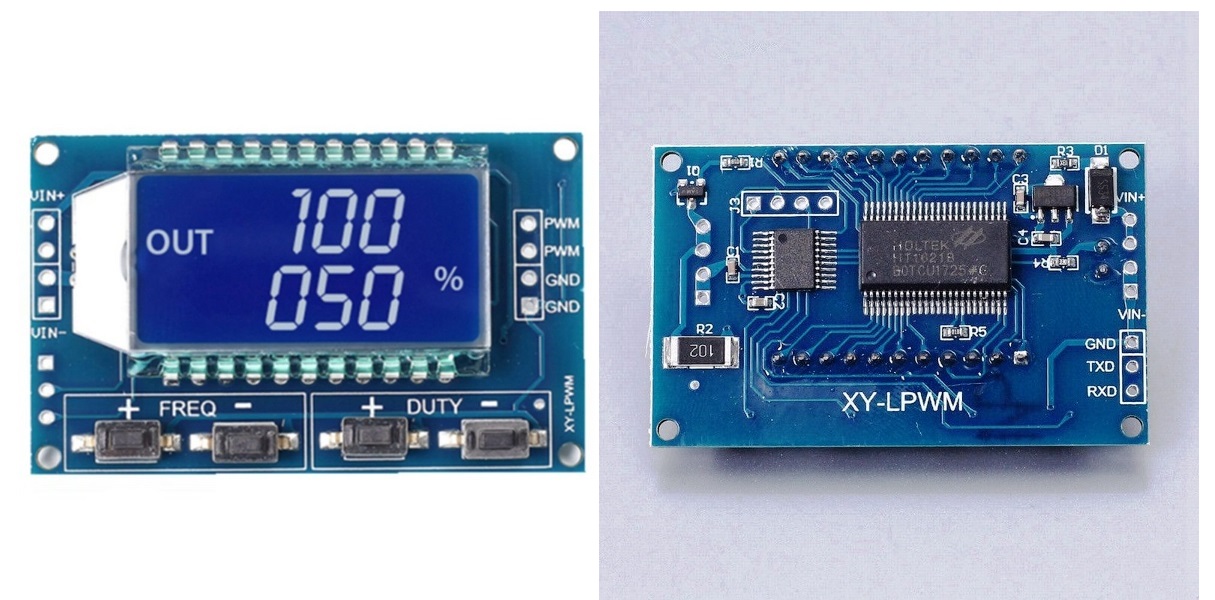
商品の説明にもシリアル通信ができると記述があり,基盤の裏
にも TXD RXD の記述があるので,外部からコントロール
できるのかなと思ってました。
手持ちのシリアル通信のアダプターに接続し,PCから,あれこれ
やってみました。
最初「テラターム」でやりましたが, FAIL の文字が帰ってくる
だけで,通信はできているようでしたが,うまくいかないようでした。
「シリアル通信ソフト」というソフト名のプログラムをベクターから
DLして,試してみると,あっけなく通信ができました。
(起動にあたっては,管理者権限で起動しないとだめでした。)
難しいプロトコルが必要かとおもいましたが,簡単なコマンドで,
制御できるようです。
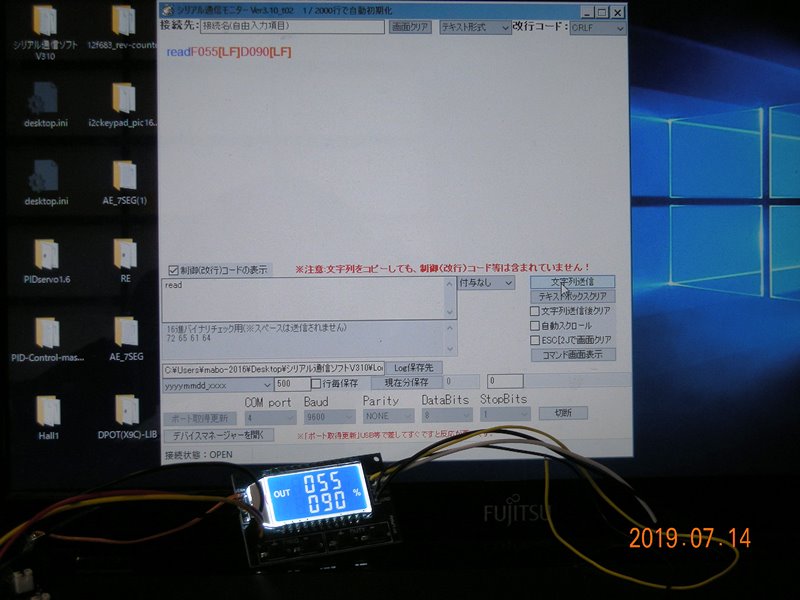
写真は, ”read” のコマンドで,設定の状態を読んでいます。
F055 → 周波数
D090 → DUTY%
と,表示されている数値を読み取ることができました。
ちなみに,設定するには,
周波数 001→999 F*** (ex F090 →90Hz)
周波数 1.00→9.99 F*.**(ex F1.45 →1.45KHz)
周波数 10.00→99.9 F**.*(ex F10.45 →10.45KHz)
周波数 1.0.0→1.5.0 F*.*.*(ex F1.4.6 →146KHz)
DUTY 1→100 D***(ex D090 →90%)
read 設定データの読み取り
でした。まだ,やっていませんが,PICからもコントロールでき
そうなので,これを使った方が,手軽にPWMの信号のコントロール
できるかもですね。
2019-07-07 Sun
ーーMACH パラレルポートでのPIDコントロールーーパラレルポートでの,PIDコントロールについて,調べました。
Smooth Stepper では,うまくいかなかったのですが,
パラレルポートでは,うまくいきました。
kernel Speed 100Hz
Moter Control
Use Spindle Motor Output と PWM Controlにチェック
Special Function
Closed Loop Spindle Control にチェック
P→1.6 I→1.0 D→1.0
PWMBase Freq 100
Index 入力 ポート 1の11ピン
PWM 出力 ポート 1の14ピン
の設定で試してみました。
入力した回転数に,MACHの方で,追従していく様子が確認
できました。
MACHは,やはり優れ物です。
PIDの設定を最適化すれば,応答速度等,よくなるような気が
します。
最初デフォルトの
P→0.25 I→1.0 D→0.3
でやりましたが,入力回転数に追従する時間が多少かかり
ました。Pを1.6に増やしたら,かなり追従までの時間が
短くなりました。一端上がって,下がります。
念のため外部の回転計でも回転数を計測しましたが,
MACHの表示とほぼ同じでした。
パラレルポートでは,確認できましたが,Smooth Stepperで
実施するには,なにか設定があるのでしょうかね。
私が確かめたのは,写真のような実験環境です。
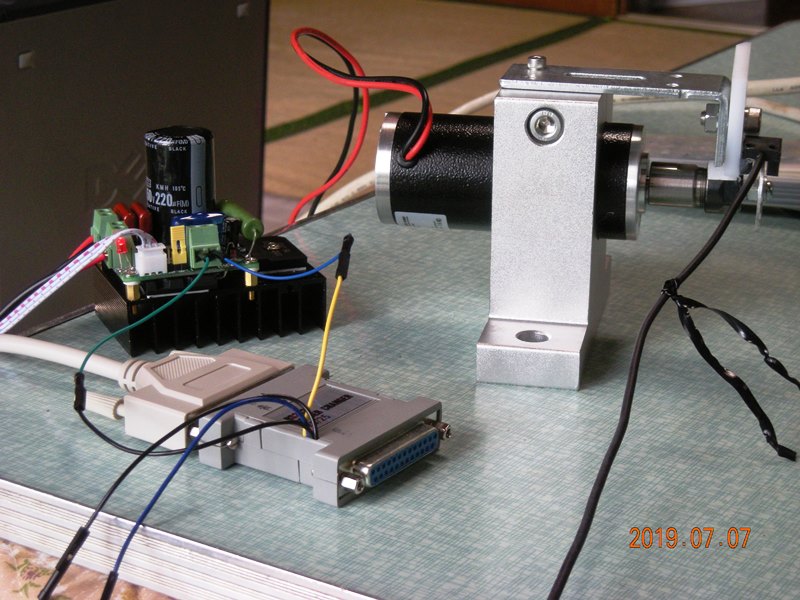
パラレルポートにジェンダーコネクターをつなぎ,ジェンダー
コネクターから引き出した線に各信号線を結線しであります。
今回使ったPWMのコントローラーは,◯華製のもので,
PIDコントロールしないと,MACHからのPWM信号よりかなり
高めの回転をします。
http://mabo52.sakura.ne.jp/index.php?e=1223
で確認した,IRF740等のFETを使うと,きっと,応答速度
もよくなるのかと思います。
2019-07-02 Tue
ーーーグレイコード(3)ーーー A相とB相の信号を使えば,回転方向を検出できることは,
理解できました。
これをプログラムで実現するには,いくつか方法がある
ようです。
自作のMPG関連では,B相の立ち上がりを検出し,それを
DFFのICにいれて,回転方向を検出してました。
今回は,別な方法でやってみようかなと思います。
基本的な考え方は,◯月の取説にあったように,前回と
今回の2回のサンプリングをして,その組み合わせの全部
から回転方向を決める方法です。
エンコーダーから,出力されるグレイコードをバイナリ変換
して,前回と今回の2回のサンプリングの差を取って,+1
の場合は時計方向,-1の場合は逆時計方向としてもいい
のですが,バイナリ変換するのにビット操作が必要なので,
私にはちょっと苦手かなと思います。
それで,組み合わせを全部拾い出し,それをインデックスに
して,回転方向を決めるのが私には分かり易いかなと思い
ました。
前回グレイコード(2)記事の表から,前回と今回の
サンプリングの可能性を考えて見ます。
可能性は,次のようになります。
時計回転
前回→今回
00 →00 動かない(0)
00 →01 時計回転(+1)
00 →11 一つ先に移動(エラー)
01 →01 動かない(0)
01 →11 時計回転(+1)
01 →10 一つ先に移動(エラー)
11 →11 動かない(0)
11 →10 時計回転(+1)
11 →00 一つ先に移動(エラー)
10 →10 動かない(0)
10 →00 時計回転(+1)
10 →01 一つ先に移動(エラー)
逆時計回転
前回→今回
00 →00 動かない(0)
00 →10 逆時計回転(-1)
00 →11 一つ先に移動(エラー)
10 →10 動かない(0)
10 →11 逆時計回転(-1)
10 →01 一つ先に移動(エラー)
11 →11 動かない(0)
11 →01 逆時計回転(-1)
11 →00 一つ先に移動(エラー)
01 →01 動かない(0)
01 →00 逆時計回転(-1)
01 →10 一つ先に移動(エラー)
全部で16通りありますので,前回を2ビットシフトして,
今回と合計すると,その数値がインデックスの数値として
使えることになります。エラーを100とすると,
m[(前回<<2)+今回]=数値
m[0000]=0
m[0001]=1
m[0011]=100
m[0101]=0
m[0111]=1
m[0110]=100
m[1111]=0
m[1110]=1
m[1100]=100
m[1010]=0
m[1000]=1
m[1001]=100
m[0010]=-1
m[1011]=-1
m[1101]=-1
m[0100]=-1
のようになり,[ ]内を16進数に直すと,
m[0]=0
m[1]=1
m[3]=100
m[5]=0
m[7]=1
m[6]=100
m[F]=0
m[E]=1
m[C]=100
m[A]=0
m[8]=1
m[9]=100
m[2]=-1
m[B]=-1
m[D]=-1
m[4]=-1
のようにすることができます。この配列を使えば,
回転方向の検出ができることになります。
2019-07-01 Mon
ーーーグレイコード(2)ーーー グレイコードをWikipediaでは,
グレイコード(英: Gray code、交番二進符号
(こうばんにしんふごう、英:Reflected Binary Codeなどとも)
とは、数値の符号化法のひとつで、前後に隣接する符号間
のハミング距離が必ず1であるという特性を持つ
よような事が書いてあります。なんの事やらと思いましたが,
どうやら,連続する2進数の符号の変化が,一つだけする
表記の仕方のようでした。
ですから,通常の表記とは,違ってるようです。下記がその
対比表です。
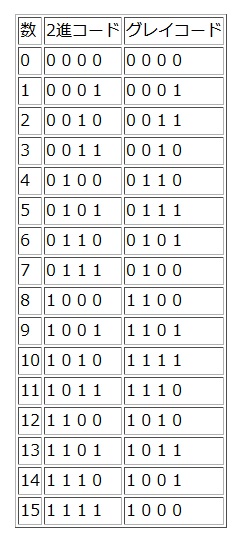
通常の2進数では,
3→4の変化で 0011→0100
のように3箇所変化してますが,
グレイコードでは,
3→4の変化で 0010→0110
のように,1カ所しか変化していません。
この性質が,エンコード等のデータの変化を取り出すのに
エラーが少なくなるとのような記載もありました。
エンコーダーの出力をみてみると,その出力は,まさに,
グレイコードでした。
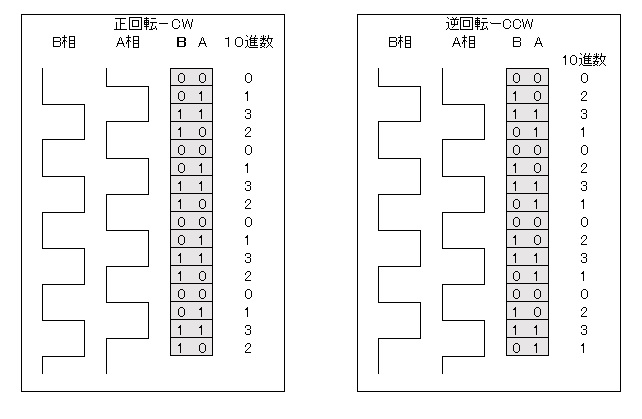
エンコーダーの出力を Hightを 1 Lowを 0 として,
B相を1ビット目,A相を0ビット目とした,2進数の出力と
見てみると,見事にグレイコードの出力になってました。
なぜ,回転の出力をA相,B相の出力に分けてあるのか,
なんとなく理解できました。
2019-06-30 Sun
ーーーグレイコード(1)---縁あって,X9C,AD5220というデジタルポテンショメーター
を弄る機会に恵まれました。
存在は,たまに見かけて知っていましたが,スピンドルの
DCモーターのコントロールもなんとかできました。
そこで,同じような原理で,自作してみようかなと思いたち
ました。
構想として,ロータリーエンコーダーや,タクトスイッチ等で
アップ・ダウンができること。
7セグLEDかLCDでモニターできること等,できればいいなと
思ってます。
そこで,いろいろ調べ始めました。手始めに,
ロータリーエンコーターをあたりました。
以前,自作のMPGを作成した時に,ちょっと,調べたのですが
調べるといくつか分からないことがでてきました。
まず目にとまったのが◯月の,
http://akizukidenshi.com/catalog/g/gK-00083/
の取説の記事で,
現在の値をf(t1),一つ前の値をf(t0)とし,記号”<”を
左ビットシフト,”+”を ex-or をそれぞれ表すものとし
て,
D=f(t0<1)+f(t1)
という回転判別式を定義します。
(1)時計回りの場合
入力系列が 00,01,11,10・・・・・・であるので,
D0=(00<1)+01=01
D1=(01<1)+11=01
D2=(11<1)+10=00
D3=(10<1)+00=00
の記述があり,演算結果の2ビットめを見ると,回転方向
を判別できると記載がありました。
ここで,なぜ,シフトするのか,なぜ,ex-orをするのか,
釈然としませんでした。
いろいろHPをあさりましたが,どうやら,グレイコードに
関係がありそうだということが諸兄のHPで分かりました。
ロータリー・エンコーダの使い方
ロータリーエンコーダの使い方
等を見て,シフトやex-or グレイコードに関係する
ということがなんとなく分かりました。
グレイコードについて,調べて見ます。
TOP PAGE △