









2019-07-14 Sun
過日,いろいろ試すのに◯mazonkから,PWM信号発生器を購入し,便利に使ってました。
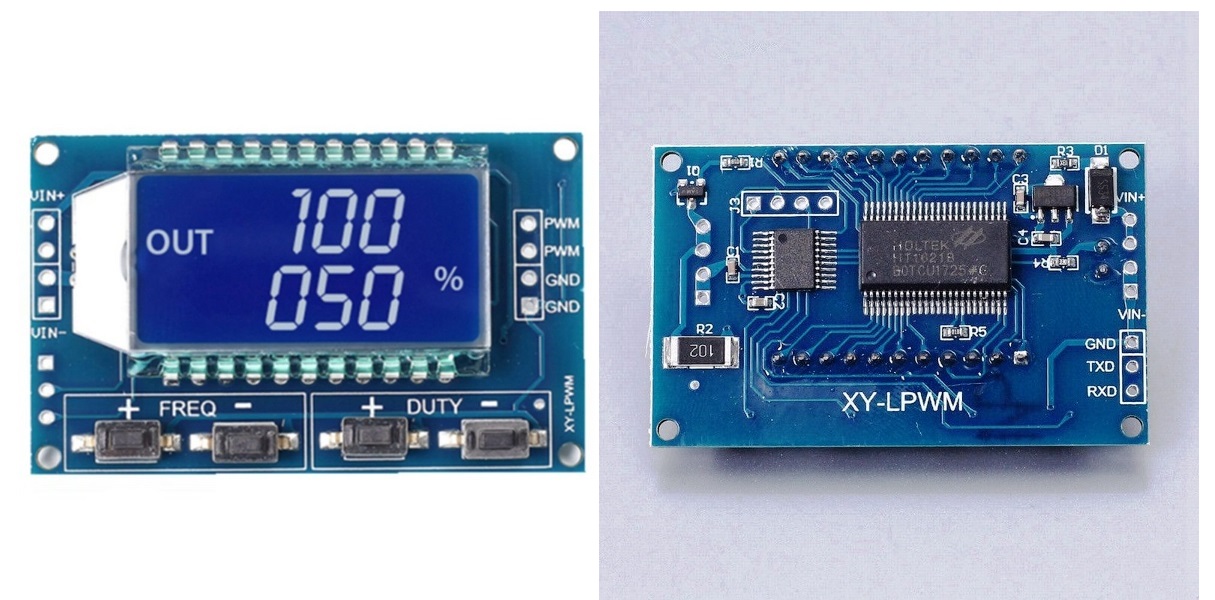
商品の説明にもシリアル通信ができると記述があり,基盤の裏
にも TXD RXD の記述があるので,外部からコントロール
できるのかなと思ってました。
手持ちのシリアル通信のアダプターに接続し,PCから,あれこれ
やってみました。
最初「テラターム」でやりましたが, FAIL の文字が帰ってくる
だけで,通信はできているようでしたが,うまくいかないようでした。
「シリアル通信ソフト」というソフト名のプログラムをベクターから
DLして,試してみると,あっけなく通信ができました。
(起動にあたっては,管理者権限で起動しないとだめでした。)
難しいプロトコルが必要かとおもいましたが,簡単なコマンドで,
制御できるようです。
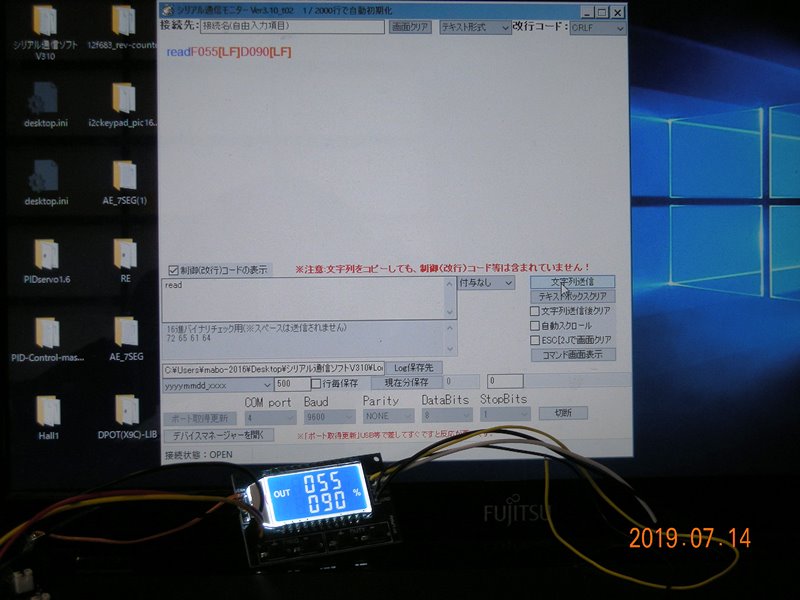
写真は, ”read” のコマンドで,設定の状態を読んでいます。
F055 → 周波数
D090 → DUTY%
と,表示されている数値を読み取ることができました。
ちなみに,設定するには,
周波数 001→999 F*** (ex F090 →90Hz)
周波数 1.00→9.99 F*.**(ex F1.45 →1.45KHz)
周波数 10.00→99.9 F**.*(ex F10.45 →10.45KHz)
周波数 1.0.0→1.5.0 F*.*.*(ex F1.4.6 →146KHz)
DUTY 1→100 D***(ex D090 →90%)
read 設定データの読み取り
でした。まだ,やっていませんが,PICからもコントロールでき
そうなので,これを使った方が,手軽にPWMの信号のコントロール
できるかもですね。
2019-07-02 Tue
ーーーグレイコード(3)ーーー A相とB相の信号を使えば,回転方向を検出できることは,
理解できました。
これをプログラムで実現するには,いくつか方法がある
ようです。
自作のMPG関連では,B相の立ち上がりを検出し,それを
DFFのICにいれて,回転方向を検出してました。
今回は,別な方法でやってみようかなと思います。
基本的な考え方は,◯月の取説にあったように,前回と
今回の2回のサンプリングをして,その組み合わせの全部
から回転方向を決める方法です。
エンコーダーから,出力されるグレイコードをバイナリ変換
して,前回と今回の2回のサンプリングの差を取って,+1
の場合は時計方向,-1の場合は逆時計方向としてもいい
のですが,バイナリ変換するのにビット操作が必要なので,
私にはちょっと苦手かなと思います。
それで,組み合わせを全部拾い出し,それをインデックスに
して,回転方向を決めるのが私には分かり易いかなと思い
ました。
前回グレイコード(2)記事の表から,前回と今回の
サンプリングの可能性を考えて見ます。
可能性は,次のようになります。
時計回転
前回→今回
00 →00 動かない(0)
00 →01 時計回転(+1)
00 →11 一つ先に移動(エラー)
01 →01 動かない(0)
01 →11 時計回転(+1)
01 →10 一つ先に移動(エラー)
11 →11 動かない(0)
11 →10 時計回転(+1)
11 →00 一つ先に移動(エラー)
10 →10 動かない(0)
10 →00 時計回転(+1)
10 →01 一つ先に移動(エラー)
逆時計回転
前回→今回
00 →00 動かない(0)
00 →10 逆時計回転(-1)
00 →11 一つ先に移動(エラー)
10 →10 動かない(0)
10 →11 逆時計回転(-1)
10 →01 一つ先に移動(エラー)
11 →11 動かない(0)
11 →01 逆時計回転(-1)
11 →00 一つ先に移動(エラー)
01 →01 動かない(0)
01 →00 逆時計回転(-1)
01 →10 一つ先に移動(エラー)
全部で16通りありますので,前回を2ビットシフトして,
今回と合計すると,その数値がインデックスの数値として
使えることになります。エラーを100とすると,
m[(前回<<2)+今回]=数値
m[0000]=0
m[0001]=1
m[0011]=100
m[0101]=0
m[0111]=1
m[0110]=100
m[1111]=0
m[1110]=1
m[1100]=100
m[1010]=0
m[1000]=1
m[1001]=100
m[0010]=-1
m[1011]=-1
m[1101]=-1
m[0100]=-1
のようになり,[ ]内を16進数に直すと,
m[0]=0
m[1]=1
m[3]=100
m[5]=0
m[7]=1
m[6]=100
m[F]=0
m[E]=1
m[C]=100
m[A]=0
m[8]=1
m[9]=100
m[2]=-1
m[B]=-1
m[D]=-1
m[4]=-1
のようにすることができます。この配列を使えば,
回転方向の検出ができることになります。
2019-07-01 Mon
ーーーグレイコード(2)ーーー グレイコードをWikipediaでは,
グレイコード(英: Gray code、交番二進符号
(こうばんにしんふごう、英:Reflected Binary Codeなどとも)
とは、数値の符号化法のひとつで、前後に隣接する符号間
のハミング距離が必ず1であるという特性を持つ
よような事が書いてあります。なんの事やらと思いましたが,
どうやら,連続する2進数の符号の変化が,一つだけする
表記の仕方のようでした。
ですから,通常の表記とは,違ってるようです。下記がその
対比表です。
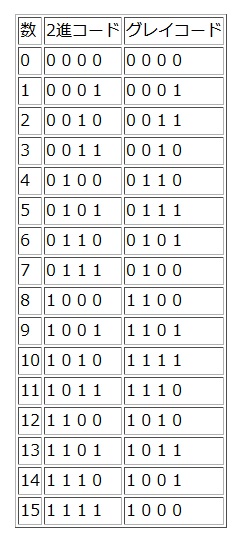
通常の2進数では,
3→4の変化で 0011→0100
のように3箇所変化してますが,
グレイコードでは,
3→4の変化で 0010→0110
のように,1カ所しか変化していません。
この性質が,エンコード等のデータの変化を取り出すのに
エラーが少なくなるとのような記載もありました。
エンコーダーの出力をみてみると,その出力は,まさに,
グレイコードでした。
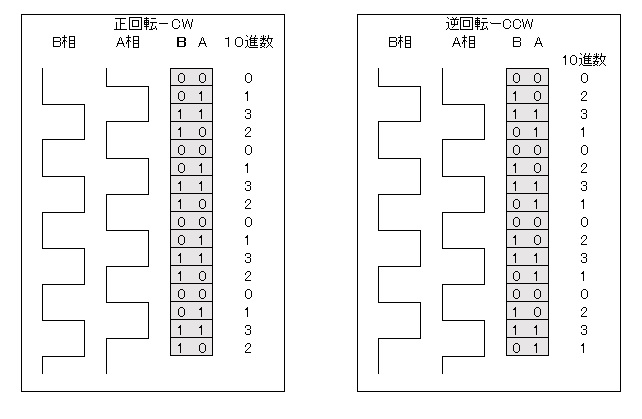
エンコーダーの出力を Hightを 1 Lowを 0 として,
B相を1ビット目,A相を0ビット目とした,2進数の出力と
見てみると,見事にグレイコードの出力になってました。
なぜ,回転の出力をA相,B相の出力に分けてあるのか,
なんとなく理解できました。
2019-06-30 Sun
ーーーグレイコード(1)---縁あって,X9C,AD5220というデジタルポテンショメーター
を弄る機会に恵まれました。
存在は,たまに見かけて知っていましたが,スピンドルの
DCモーターのコントロールもなんとかできました。
そこで,同じような原理で,自作してみようかなと思いたち
ました。
構想として,ロータリーエンコーダーや,タクトスイッチ等で
アップ・ダウンができること。
7セグLEDかLCDでモニターできること等,できればいいなと
思ってます。
そこで,いろいろ調べ始めました。手始めに,
ロータリーエンコーターをあたりました。
以前,自作のMPGを作成した時に,ちょっと,調べたのですが
調べるといくつか分からないことがでてきました。
まず目にとまったのが◯月の,
http://akizukidenshi.com/catalog/g/gK-00083/
の取説の記事で,
現在の値をf(t1),一つ前の値をf(t0)とし,記号”<”を
左ビットシフト,”+”を ex-or をそれぞれ表すものとし
て,
D=f(t0<1)+f(t1)
という回転判別式を定義します。
(1)時計回りの場合
入力系列が 00,01,11,10・・・・・・であるので,
D0=(00<1)+01=01
D1=(01<1)+11=01
D2=(11<1)+10=00
D3=(10<1)+00=00
の記述があり,演算結果の2ビットめを見ると,回転方向
を判別できると記載がありました。
ここで,なぜ,シフトするのか,なぜ,ex-orをするのか,
釈然としませんでした。
いろいろHPをあさりましたが,どうやら,グレイコードに
関係がありそうだということが諸兄のHPで分かりました。
ロータリー・エンコーダの使い方
ロータリーエンコーダの使い方
等を見て,シフトやex-or グレイコードに関係する
ということがなんとなく分かりました。
グレイコードについて,調べて見ます。
2019-06-01 Sat
PICをあれこれいじってます。ところが,昨日,突然,PICへの書き込みができなくなりました。
思いつくこと全てやりましたが,だめでした。
それで,PICKITが故障かなと思い,安いの早速ポチりました。
夜,また試してみようと,あれこれやると,
原因が判明しました。PICと基盤接続の自作のコードの一本が
コネクターの部分で,断線してました。
あーあ,あーあ,
ジェジェジェジェッ
でした・・・・・。
2019-02-27 Wed
制作のついてでに,手元にあるI2CインターフェースのLCDをケースに入れて動作を確認しました。
PICのプログラムを組んでももかったのですが,デバック等
多少手こずりそうだったので,諸兄のHPにあったaruduino
をパクりで,動作を確認しました。
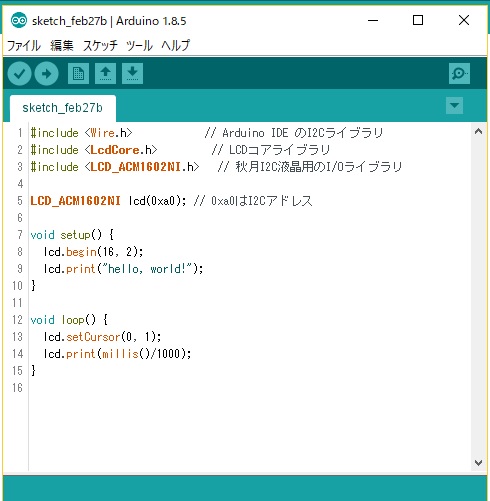
諸兄の作られたaruduinoのACM1602用のライブラリーも
そのまま使わせていただきました。あっけなく完動いたしまし
た。
諸兄の配線図では,ACM1602とaruduinoを直接つないで
いるようでしたが,念のため,間にレベル変換の基板をいれ
て,接続しました。これ必要ないのかもですね。
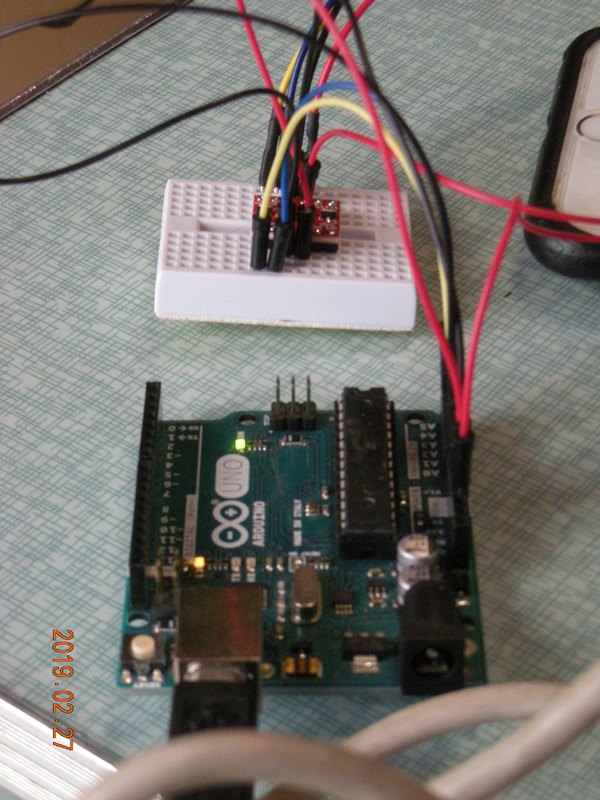
諸兄の配線図では,A4とA5を3.3Vにプルアップして,LCD
に直接つないでいるようでした。このへんの詳細がちょっと
分かりません。
とりあえず動きましたので,これから,ボチボチPICの方も,
プログラム見ていきたいと思います。

2019-02-21 Thu
おもちゃの作成を初めて何日か過ぎました。やっと,だいたい完成です。
おもちゃは,なんのことはない,ポケモンgoプラス
という,ポケモンをボタン一つで捕獲できる器具を,自動で,
動作できるようにしたものです。

このポケモンgoプラスの中身を,諸兄のHPを参考に,
スイッチと振動モーターの結線を引き出し,フォットセンサー
で読み取った光に応じて,フォットカプラーにて,引き出し
た線を短絡させるという動作を,自動で行うようにしたものです。

諸兄のHPのように短絡させただけで,自動化できるのですが,
ちょっと,面白みがないので,手に入った光センサーと組み合わ
せて作りました。
ちょっと,大きいのですが,プラスチックの箱にいれて,遊んで
みる予定です。

2019-02-19 Tue
備忘録で,回路図の掲載です。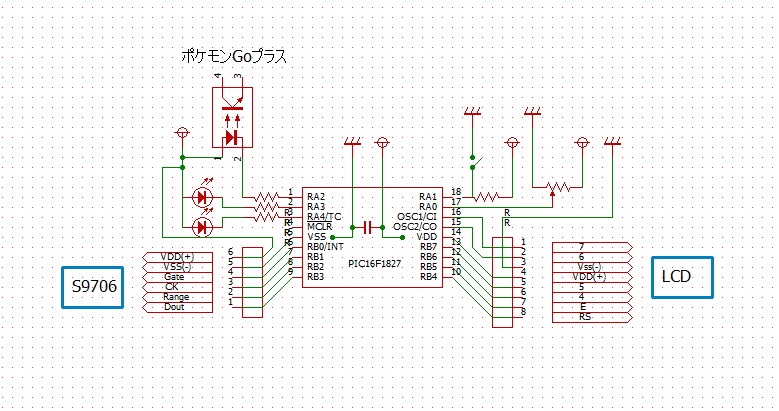
冗長なプログラムですが,掲載します。
main.txt
あっちこっち,ゴミが残ってますし,一貫した表記では,
ないですね。その時の気分で,細かい部分が変わってしまいまし
た。
そうそう,回路図書いていて,フォットカプラーとタクトスイッチ
が逆になってること気がつきました。
回路図が間違いですね。面倒なので,そのままです。
LCDの接続には,全部で8本の結線が必要です。
I2C方式だと,半分の4本で済みます。
手元にI2C用のLCDもあるので,LCDのライブラリー
も諸兄のページを参考に作っておこうかと思います。
ついでにケースにいれときますかね。
2019-02-18 Mon
このところ取り組んでいたおもちゃのプロトタイプがほぼ完成しました。
完成の前に,いくつかはまりました。今日は,AD変換の配線
にはまりました。
電気の基礎ができてる方は,こんなことはないのでしょうが,
AD変換がうまくいかなく,もがきました。
原因は,なんのことはない,AD変換のボリュームは,分圧して
ることを忘れていました。つまり,-側の配線をしていません
でした。こんな知識もないのか,とちょっとがっかりしました。
それと,センシングが微妙で,光源にセンサーが近すぎると
緑成分と青成分の両方に感応してしまいます。センシングの
時間を短くすると感度が悪くなるしで,ちょっと,いたちごっご
でした。
ただ,それぞれの色を感知するときは,その色の数値が
他の色の数値より多くなるので,プログラムで処理しまし
た。
備忘録のために,回路図,プログラム等,順次掲載しようと
思います。
作ったおもちゃはなんのことはない,青と緑のLEDの光を感知
して,感知した色を点灯させて,外部スイッチ(フォットカプラー)
をONにするという単純なものです。
外部スイッチをONにする時間と点灯LEDの時間,をどうするか
迷いましたが,外部スイッチをONにする時間とLEDをONに
する時間は,0.1秒程度にしました。
それと,長い時間その色を感知すると,0.1秒点灯の繰り返し
になりますので,一度,点灯させたら,1秒程度やすませる
というようなプログラムにしました。
単純に delay を使ってもよかったのですが,その間,センシング
も止まるので,割り込みを使って,約1秒の待ち時間をつくって
みました。
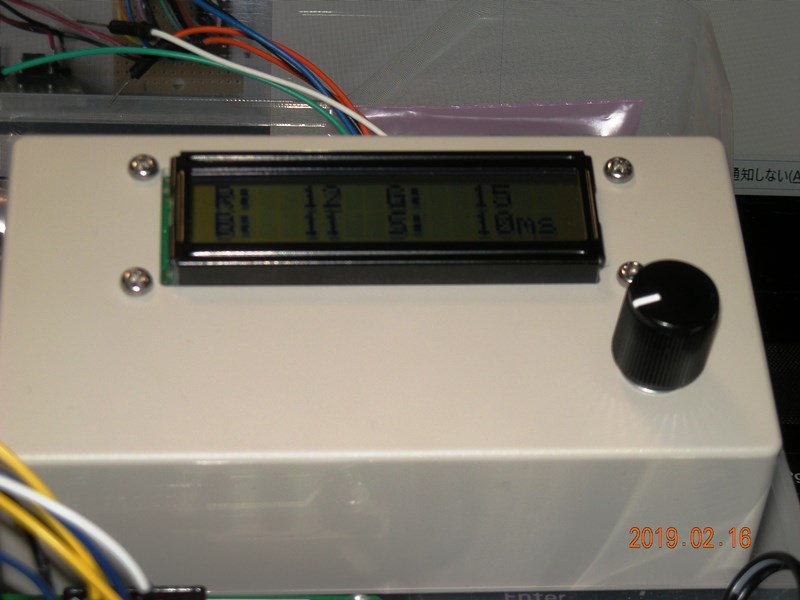
2019-02-16 Sat
おもちゃを作成してますが,作成の過程でモニターするために,LCDが必要でした。
今までは,空中配線でその都度間に合わせていましたが,
何度も同じことをするので,一つ,ケースに組み込んだ物をつくって
おくことにしました。
できれば,3V(乾電池)から5Vで動作させたいので,以前作った。
ローコストLCDシリアル通信モニターを参考に
LCDのバックライト用にチャージポンプ回路を組み込むことにしました。
諸兄の回路をパクらせていただきましたが,制作の過程で,
なかなかうまくいかず,二つ同じような物をつくりました。
よく調べてみたら,最初のも正常にうごいてました。
二つ作ることになったのは,PWM信号がうまくでてるのか,オシロ
で確認しましたが,信号をうまく取り出せなかったからです。
それで,もう一つ作ることになりました。よく調べて見たら,
二つとも正常に動作してました。
当たり前なのかもしれませんが,チャージポンプ回路からでている
負電源をオシロで確認しようとあれこれやりましたが,確認できま
せんでした。これ,きっとあたりまえなんでしょうね。テスターで
確認すると,だいたい理論値通りの数値がでていたので,
よしとしました。
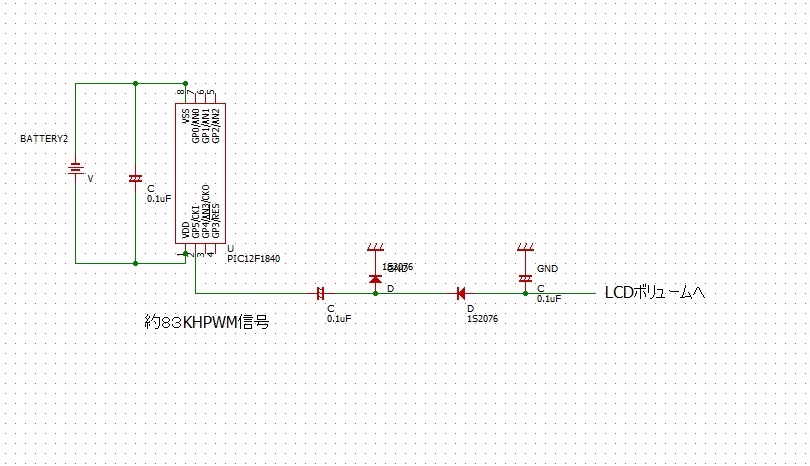
諸兄は,UART関係やら設定やらチャージポンプのための発信等
を一つのICでしてましたが,発信だけが必要なので,小さくピン数が少ない
12F1840で専用発信回路を組みました。
といっても,諸兄のパクリです。
まだ,
(本日,既存の回路に組み込んでみたら,
きちんと表示されましたので,誤配線等はなかったようです。)
3Vで動作したので,大丈夫かなと思います。
全面と中身です。


TOP PAGE △