
ーーMACH パラレルポートでのPIDコントロールーー
パラレルポートでの,PIDコントロールについて,調べました。
Smooth Stepper では,うまくいかなかったのですが,
パラレルポートでは,うまくいきました。
kernel Speed 100Hz
Moter Control
Use Spindle Motor Output と PWM Controlにチェック
Special Function
Closed Loop Spindle Control にチェック
P→1.6 I→1.0 D→1.0
PWMBase Freq 100
Index 入力 ポート 1の11ピン
PWM 出力 ポート 1の14ピン
の設定で試してみました。
入力した回転数に,MACHの方で,追従していく様子が確認
できました。
MACHは,やはり優れ物です。
PIDの設定を最適化すれば,応答速度等,よくなるような気が
します。
最初デフォルトの
P→0.25 I→1.0 D→0.3
でやりましたが,入力回転数に追従する時間が多少かかり
ました。Pを1.6に増やしたら,かなり追従までの時間が
短くなりました。一端上がって,下がります。
念のため外部の回転計でも回転数を計測しましたが,
MACHの表示とほぼ同じでした。
パラレルポートでは,確認できましたが,Smooth Stepperで
実施するには,なにか設定があるのでしょうかね。
私が確かめたのは,写真のような実験環境です。
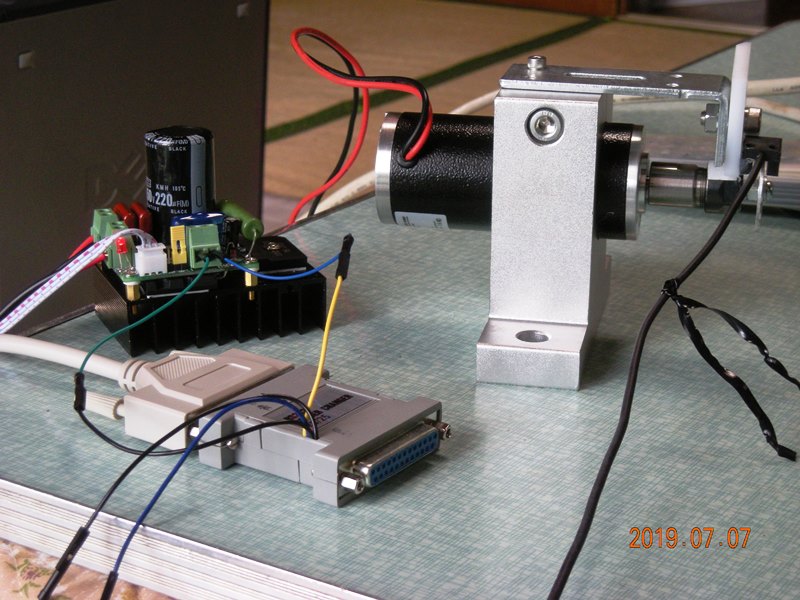
パラレルポートにジェンダーコネクターをつなぎ,ジェンダー
コネクターから引き出した線に各信号線を結線しであります。
今回使ったPWMのコントローラーは,◯華製のもので,
PIDコントロールしないと,MACHからのPWM信号よりかなり
高めの回転をします。
2019年6月18日の記事
で確認した,IRF740等のFETを使うと,きっと,応答速度
もよくなるのかと思います。