過日,いろいろ試すのに◯mazonkから,PWM信号発生器を購入し,
便利に使ってました。
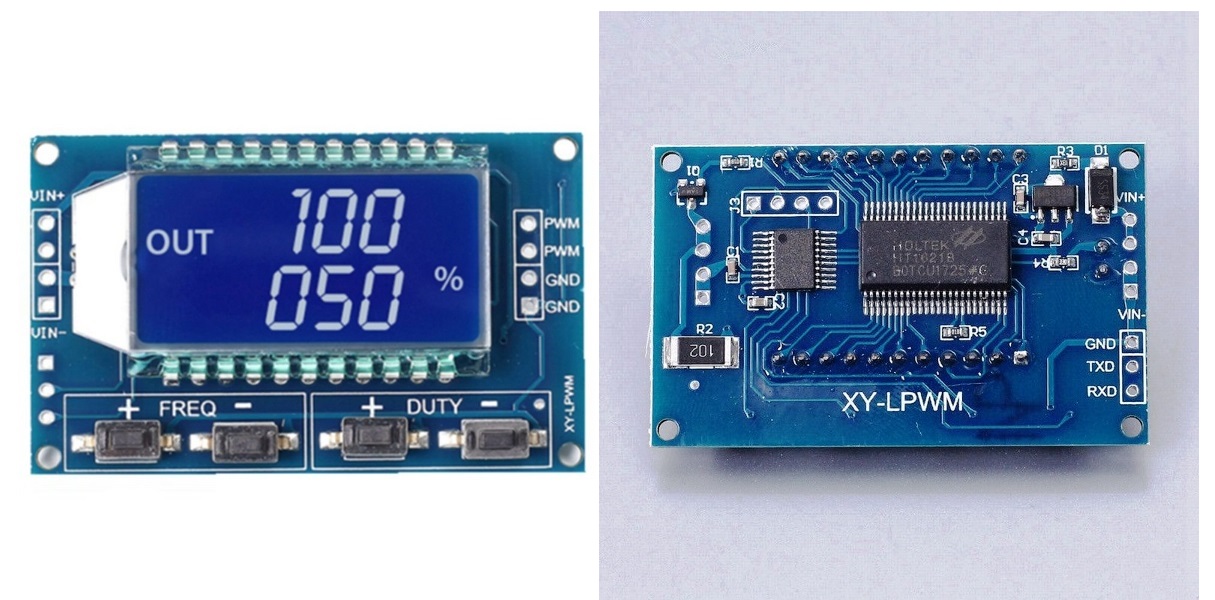
商品の説明にもシリアル通信ができると記述があり,基盤の裏
にも TXD RXD の記述があるので,外部からコントロール
できるのかなと思ってました。
手持ちのシリアル通信のアダプターに接続し,PCから,あれこれ
やってみました。
最初「テラターム」でやりましたが, FAIL の文字が帰ってくる
だけで,通信はできているようでしたが,うまくいかないようでした。
「シリアル通信ソフト」というソフト名のプログラムをベクターから
DLして,試してみると,あっけなく通信ができました。
(起動にあたっては,管理者権限で起動しないとだめでした。)
難しいプロトコルが必要かとおもいましたが,簡単なコマンドで,
制御できるようです。
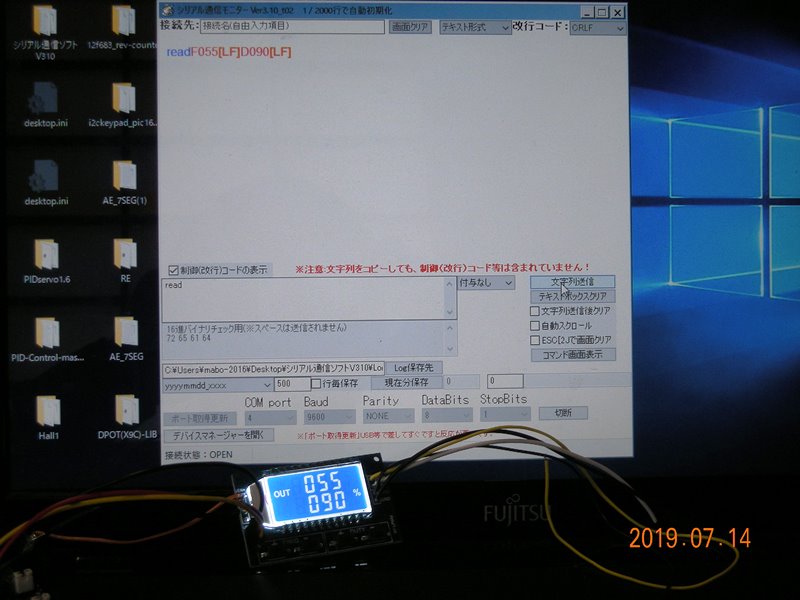
写真は, ”read” のコマンドで,設定の状態を読んでいます。
F055 → 周波数
D090 → DUTY%
と,表示されている数値を読み取ることができました。
ちなみに,設定するには,
周波数 001→999 F*** (ex F090 →90Hz)
周波数 1.00→9.99 F*.**(ex F1.45 →1.45KHz)
周波数 10.00→99.9 F**.*(ex F10.45 →10.45KHz)
周波数 1.0.0→1.5.0 F*.*.*(ex F1.4.6 →146KHz)
DUTY 1→100 D***(ex D090 →90%)
read 設定データの読み取り
でした。まだ,やっていませんが,PICからもコントロールでき
そうなので,これを使った方が,手軽にPWMの信号のコントロール
できるかもですね。