ーーーグレイコード(2)ーーー
グレイコードをWikipediaでは,
グレイコード(英: Gray code、交番二進符号
(こうばんにしんふごう、英:Reflected Binary Codeなどとも)
とは、数値の符号化法のひとつで、前後に隣接する符号間
のハミング距離が必ず1であるという特性を持つ
よような事が書いてあります。なんの事やらと思いましたが,
どうやら,連続する2進数の符号の変化が,一つだけする
表記の仕方のようでした。
ですから,通常の表記とは,違ってるようです。下記がその
対比表です。
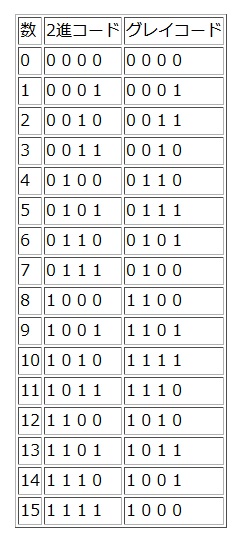
通常の2進数では,
3→4の変化で 0011→0100
のように3箇所変化してますが,
グレイコードでは,
3→4の変化で 0010→0110
のように,1カ所しか変化していません。
この性質が,エンコード等のデータの変化を取り出すのに
エラーが少なくなるとのような記載もありました。
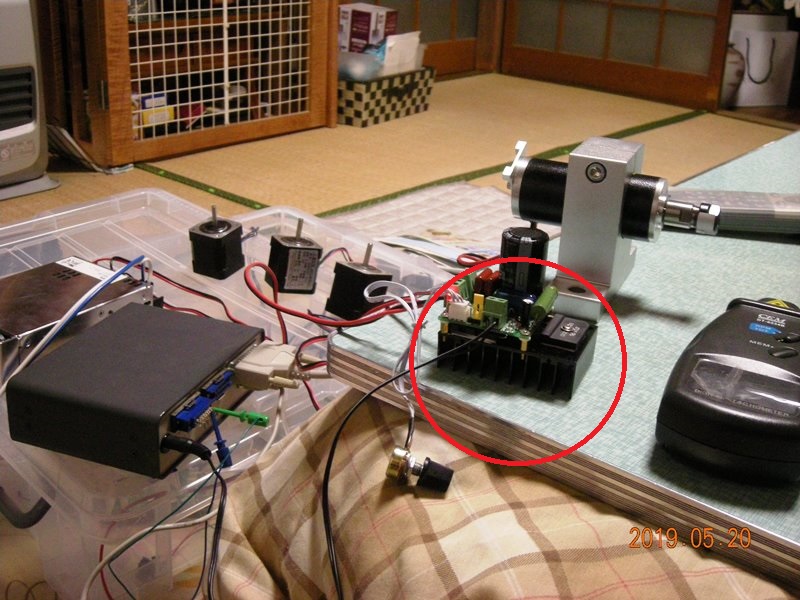
エンコーダーの出力をみてみると,その出力は,まさに,
グレイコードでした。
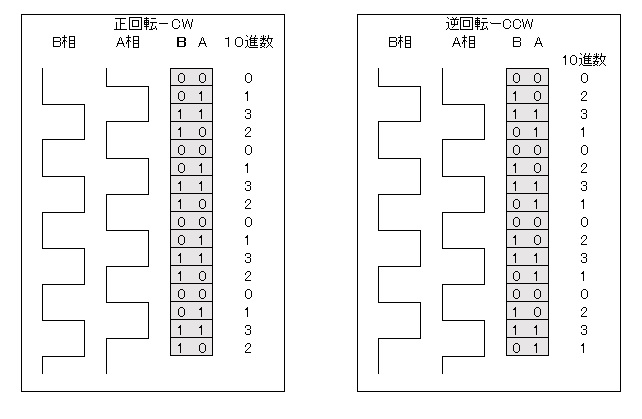
エンコーダーの出力を Hightを 1 Lowを 0 として,
B相を1ビット目,A相を0ビット目とした,2進数の出力と
見てみると,見事にグレイコードの出力になってました。
なぜ,回転の出力をA相,B相の出力に分けてあるのか,
なんとなく理解できました。