道のりは、長いです。
自作手パの無線化を進めてきましたが、一つ、疑問だったこ
とが解決できそうですので、仕様?を変更してみたいと思い
ます。
今までの無線手パでは、A相B相の信号は、直接送っていま
せんでした。A相とB相の信号から、CWの信号とCCWの信号
に変換して、CWの信号とCCWの信号を送りました。
受信側で、CWとCCWの信号に応じて、パルスを生成してい
ました。
このようにしてたのは、A相・B相の立ち上がりの検出はでき
たのですが、立ち下がりの検出方法が分からなかったから
です。
NANDゲート等を使ってNOT・A相を作ればいいというアドバイ
スをいただきました。下記のような回路で、試作してみようと
思います。
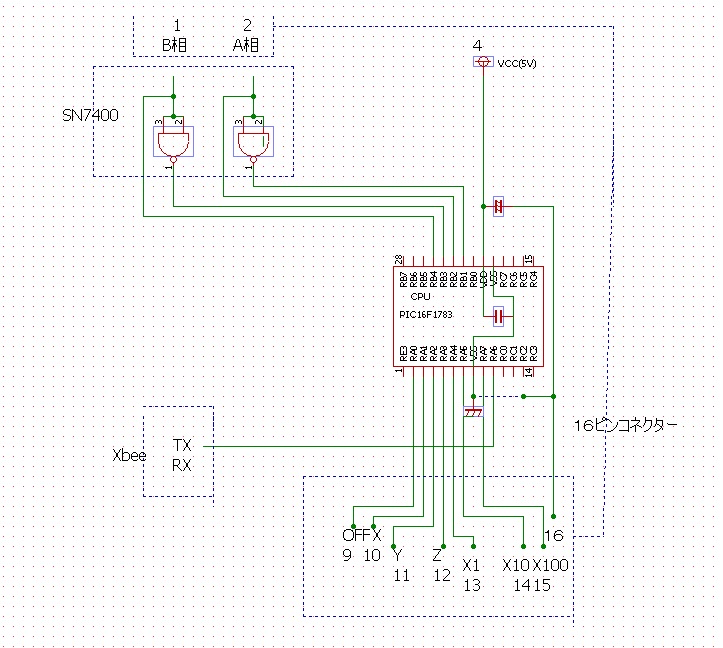
CWやCCWのの判定をするのに、立ち上がりでの外部
割り込みを使いましたが、NOT・A相、NOT・B相を作ることで
A相B相の立ち下がりを立ち上がりとして検出できそうですの
で、状態変化割り込みでNOT・A相、NOT・B相の検出を追加す
るだけですから、それほど大きな変更はしなくてすみ
そうです。