やっと長い冬眠から目覚めました(笑)
ちょっと面倒になって,ブログの更新をしていませんでした。
その間も,いろいろあさってましたが,ある海外のサイトで,
arduinoを使って,Android端末をDROにする記事がありました。
いろいろくぐって,オープンソースでプロジェクトを作成してる
HPにたどりつきました。
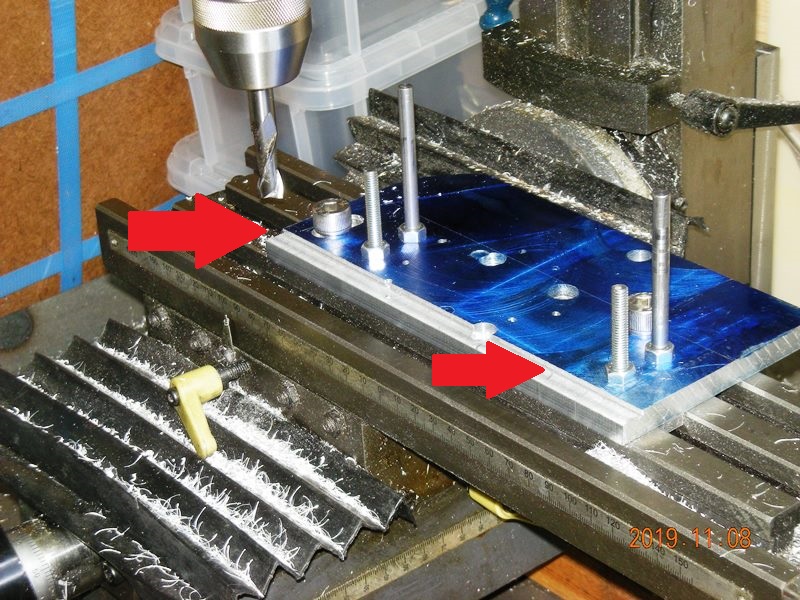
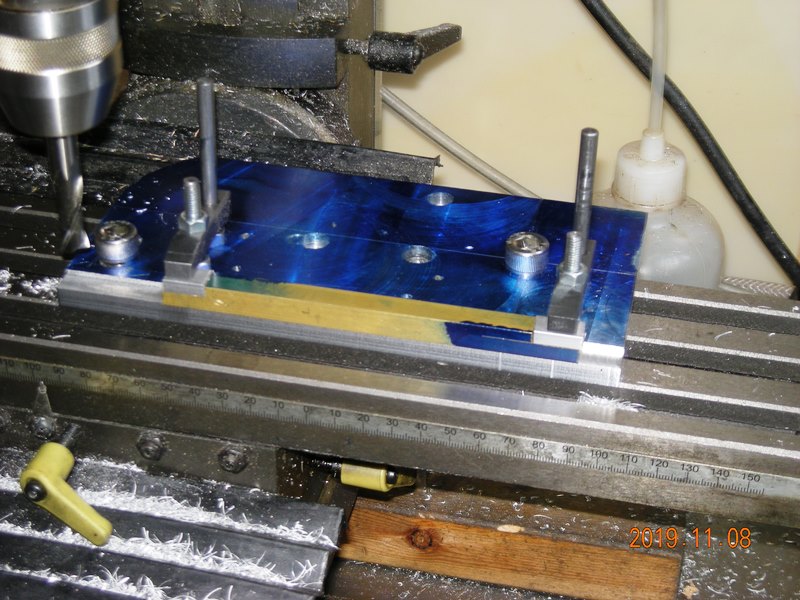
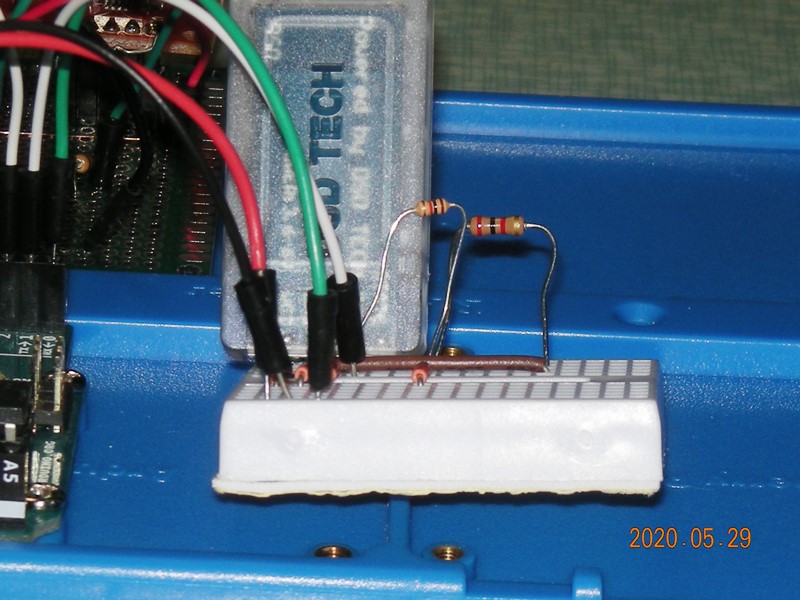
まねしてみようと思い,あれこれもがきました。ブレッドボードで,
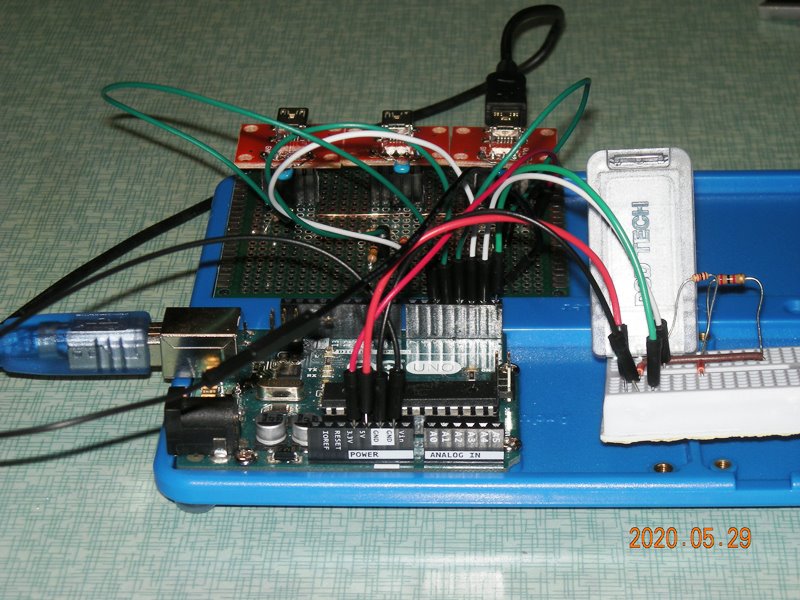
写真のような回路で実験しましたが,次の動画のような
結果がでましたので,また,備忘録がてらまとめておこうと
思います。
回路図は,前掲のHPの冒頭にありますので,簡単に作成できる
はずです。
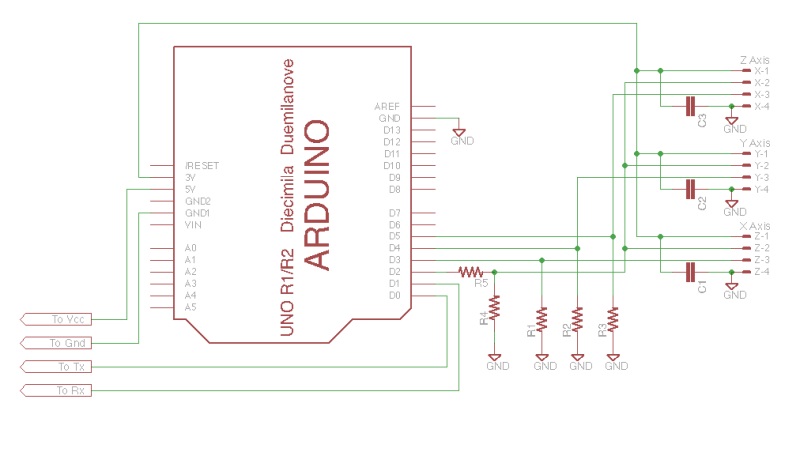
(HPよりお借りしました。)
部品は下記の記述がありました。
R1-R3 Resistor, 10K 3
R4 Resistor, 330 Ohm 1
R5 Resistor, 220 Ohm 1
C1-C3 Capacitor, ceramic, 0.1uF 3
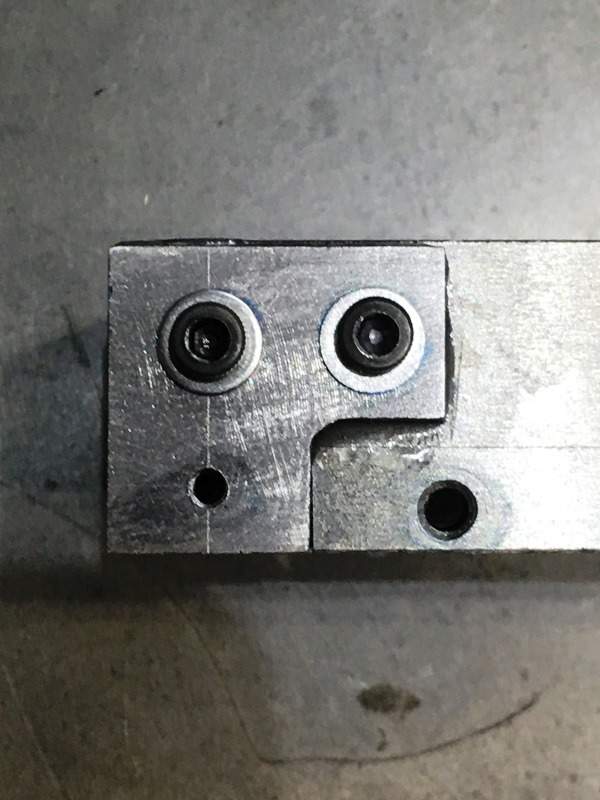
思うようにいかなかったのは,USBのコネクターもピンアサインで。
あれこ調べました。
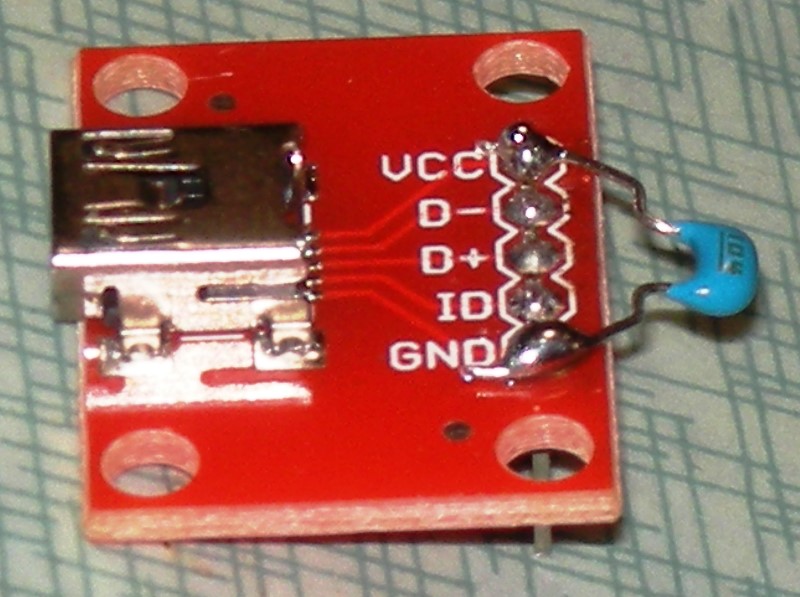
写真と回路図は,VCCとGNDが逆なので,注意が必要でした。
それと,
「D+」・・・・・・・・「Z-3」(データ)
「D-」・・・・・・・・・「Z-2」(クロック)
ようになってますので,ここも要注意かなと思います。
写真の「ID」は,無結線です。
それと,BLUETOOTHのアダプターですが,当初 HM-18 という
のを使いましたが,Android端末と接続が持続できないので,
HC-5 という物に交換しました。aruduinoとの接続で,分圧等
で,電圧落とす必要があるのかなと思いましたが,直結で
大丈夫でした。
USBのコネクターも,HC-5のBLUETOOTHも●ZONから購入
しました。
プログラムは,MSP430LaunchPad用とarduino用があるようで,
記載されているHPも違うようです。
MSP430用プログラム
aruduino用スケッチ
スケッチは,HPの下の方にあります。
Android端末用のアプリは,
Google Play
から入手できます。
私は,フライスのZ軸に使ってたDROが調子悪くなり,
時々数値が飛ぶようになったので,新しい物に交換しましたので,
調子の悪いものて実験しました。また,Android端末は,家の
が前に使ってたArrows NX なる古い携帯をつかいました。
AndroidのエミュレータをPCに入れてやってみましたが,
BLUETOOTHの設定がうまくいかず,動きませんでした。
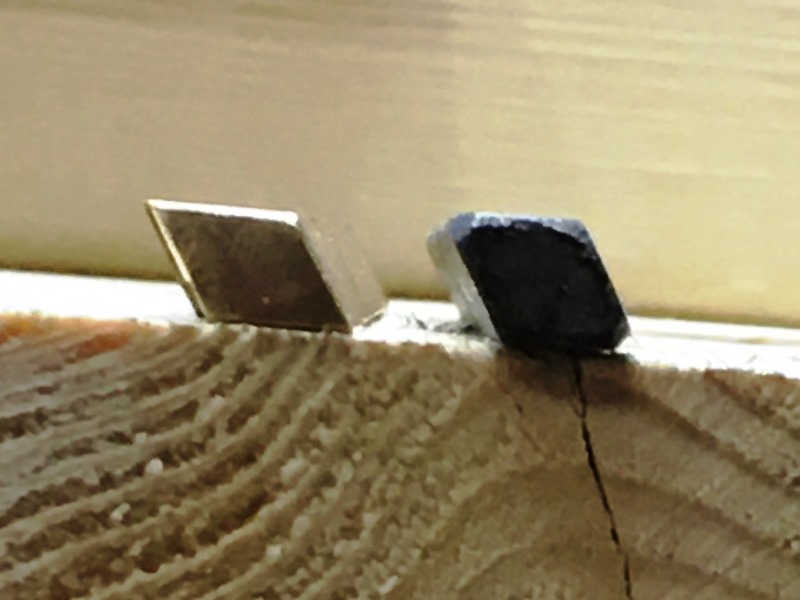
実験で使ったスケールはiGagingの古いものですが,新しいものにも対応し
ているようで,基盤そのものの販売もあるようです。
基盤を購入して,つなげばそれでできますので,
その方がてっとりばやいかもですね。でも高い。
互換品等使えば,DROが安く設置できるかもですね。