
諸兄のHPに影響されて,Fusion360を弄り始めました。
なかなか思うように操作ができませんが,これ一つで,
図形作成からパスの作成までできてしまいます。
使えるようになると,大きな武器になるように思います。
悪戦苦闘して,剪定ばさみの取手のモデリングができました。
あわよくば,アルミ等で,削り出せればなんて考えてますが,
道のりは,遠いです。
3Dの加工になりますので,4面の加工をしなければなりま
せん。どんな手順でするか,4面の加工となると,ワークの
固定だけでも,大変です。
Fusion360のいいところの一つは,作成の過程の履歴が
残ることです。
ビデオよろしくその履歴を再生することができます。
3D加工はしたことがないのですが,課題ですね。
---NCVCのHPダウン---
64ビットのノートを購入してから,環境を少しずつ作ってい
ます。
NCVCも入れておこうとアクセスしましたが,ダウンしているよう
で,アクセスできません。
サーバーの不具合でしょうか。NCVCのHPは確かXOOPSを
使ってたと記憶しています。
私も以前XOOPSでHPを作成したことがありますが,結構難し
かったように思います。
VECTORでもDLできますが,早く復活してくれないか
なあ。
---自作MPGワイヤレス化 (16)---
道のりは、長いです。
自作手パの無線化を進めてきましたが、一つ、疑問だったこ
とが解決できそうですので、仕様?を変更してみたいと思い
ます。
今までの無線手パでは、A相B相の信号は、直接送っていま
せんでした。A相とB相の信号から、CWの信号とCCWの信号
に変換して、CWの信号とCCWの信号を送りました。
受信側で、CWとCCWの信号に応じて、パルスを生成してい
ました。
このようにしてたのは、A相・B相の立ち上がりの検出はでき
たのですが、立ち下がりの検出方法が分からなかったから
です。
NANDゲート等を使ってNOT・A相を作ればいいというアドバイ
スをいただきました。下記のような回路で、試作してみようと
思います。
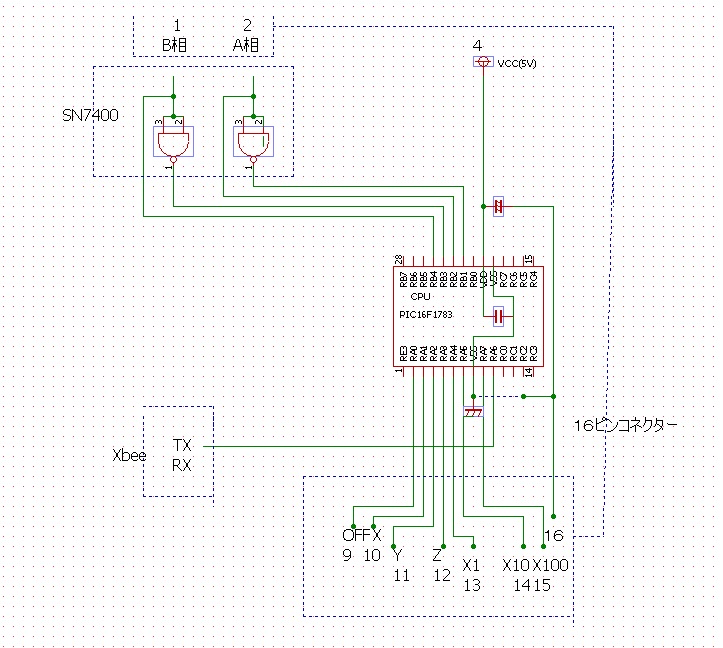
CWやCCWのの判定をするのに、立ち上がりでの外部
割り込みを使いましたが、NOT・A相、NOT・B相を作ることで
A相B相の立ち下がりを立ち上がりとして検出できそうですの
で、状態変化割り込みでNOT・A相、NOT・B相の検出を追加す
るだけですから、それほど大きな変更はしなくてすみ
そうです。
---自作MPGワイヤレス化 (15)---
自作手パ(MPG)をワイヤレス化するのにアダプターを作製
し、後は、ケースに組む状態になってます。
ただ、念のデータの取りこぼしを調べたら、パルスジェネレータ
を早く回すと、約半分の取りこぼしがあったので、受信側の
プログラムにリングバッファーをいれました。
リングバッファーをいれることで、ほぼデーターの取りこぼし
がなくなりました。
多少、疑問が残ったので、送受信のデーターの取りこぼし
を調べるのに、ローコストLCDシリアル通信モニターを
作製しました。
これだけでは、ただデーターの表示をするだけなので、
カウントしたデータを計測してターミナルに表示できるように
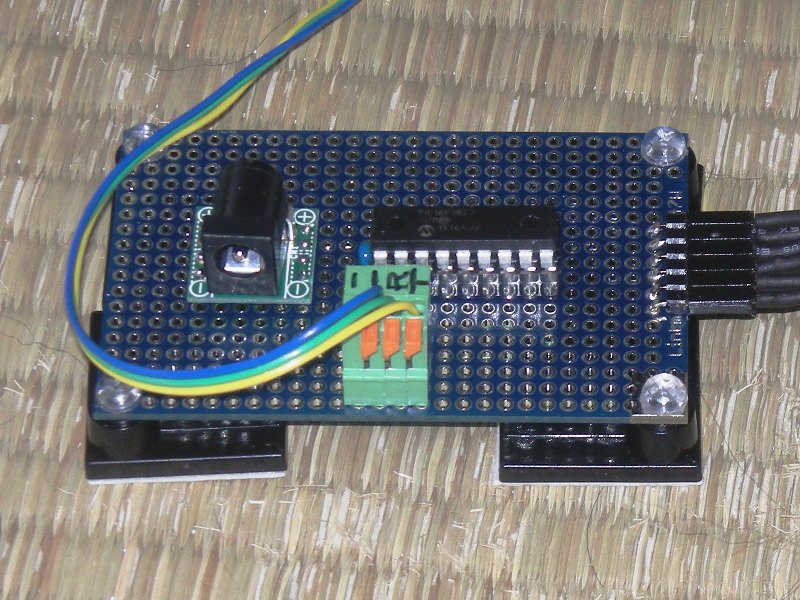
基板とプログラムを作成しました。
基板といっても、PICにバスコンとICSPの端子をつけ
ただけのものです。
比較的短時間で、ほぼ動くようになりましたが、二つほど
ドツボにはまって、二日ほどもがくことになりました。
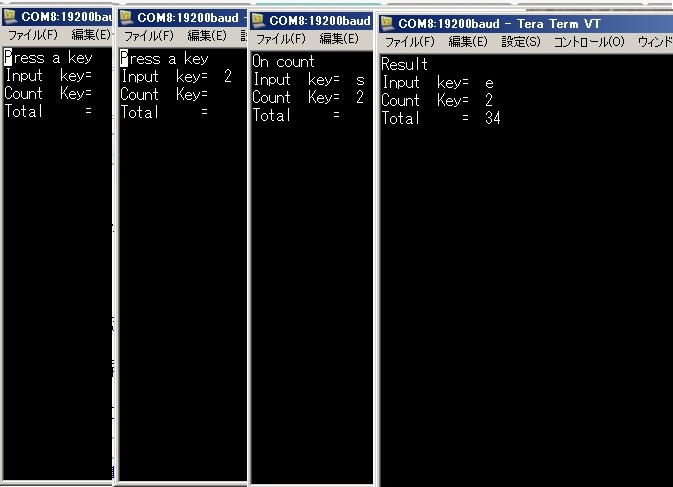
一つは、リングバッファーの操作でした。「s」のキャラクター
が入力された一つ前のデーターをカウントのキーにするのに、
リングバッファーの読み取りのポインターを「s」の一つ前に
もどせばいい、と思いこんでいました。これが、ドツボの始まり
でした。
いくら、やっても、思ったキーになりません。
読み込んだデータを、デバッグ用に表示してみて、やっと
分かりました。
データを取り込んだ後、ポインターを次の読み込みにそ
そなえて、一つ進めていたのです。
本来なら、ポインターを二つもどさないとだめなわけでした。
「-1」としていたところを「-2」にしてやっと解決です。
もう一つは、久しぶりに使ったprintf( )のフォーマットの間
違いでした。
「int」の「%4d」としなければならないところを、「char」の
「%c」としていました。当たり前に、表示されないので、
あれこれいじって、やっとprintf( )のフォーマットにたどり
つきました。
昔、PC用に、Cであれこれやっていたころは、printf( )が
大嫌いで、直接ビデオラムを操作して表示する関数等を作って
使ってました。
今回は、ターミナルへの表示位置を決めるのに、printf( )を
つかって、エスケープシーケンスの使いまくりでした。
とりあえずのプログラムです。
main.c
例によって、ゴミが沢山のこっています。表示をもうちょっと洗練
させたいなと思ってますが、計測中の表示をやめて、計測終了
後に表示させた方が、いいのかなと、思案中です。
---手パ(手動パルスジェネレーター)切り替え器制作(10)---
一応完成した手パ(手動パルスジェネレイター=MPG)で
すが、コントロールするのに、割り当てた信号線を、
オルタネートでコントロールしてました。ふとしたことで、
モーメンタリーでもコントロールできるのではと思い、タクト
スイッチで、簡単な基板を作って、実験してみました。
結論から言うと、モーメンタリーでも、コントロールが可能
でした。
JogモードからMPGモードへの切り替え、各軸の選択は、
モメンタリースイッチでも大丈夫でした。
市販のMPGの各軸選択には、ロータリースイッチが使われて
います。ロータリースイッチにするのは、多分、誤動作防止
の意味合いが強いのかなと思いました。
---自作MPGワイヤレス化 (14)---
昨日コーディングしたリングバッファーを使ったプログラムの
検証が終わりました。
ほぼ満足のいく結果で、データーの取りこぼしもほとんどなく
なりました。
今回、リングバッファーに使ったメモリーは、256バイトで、
これだけで、メモリーの74%を使ってしまいます。
でも、効果、絶大ですね。パルスの生成に時間がかかる
ので、その時間差を吸収してくれます。MPG1回転で、
100パルスですから、2回半程度の回転に対応できると
思います。
今回は、大きなはまりどころもなく、すんなりでした。
main.c
ざっと、ゴミを取り除いたプログラムです。
例によって、「uart.c」と「uart.h」は諸兄のものをそのまま
使わせていただいてます。
LCDのデバックモニターを作成予定ですが、ついでに、
I2C接続のLCDもあれこれいじってみようと思います。
本日、LCDの部品が到着しました。
---自作MPGワイヤレス化 (13)---
どこでデータが欠落するのか、いろいろ調べようと思って
ます。そのために、LCDデバックモニターを作って、みようと思
います。部品を注文しましたので、届くのをまちます。
デバッグモニターの制作と平行して、データー受信を
リングバッファーを使ったプログラムに変更しみようと
思います。
当初は、リングバッファーを使ったプログラムにする予定で
したが、リングバッファーの理解がいまいちで、コーデング
できませんでした。その一番の原因は、構造体とポインタの
理解ができてないことでした。
ネットには、リングバッファーを使ったプログラムが沢山ある
のですが、そのほとんどが、構造体とポインタという、私が
一番苦手な手法を使ってありました。
いろいろあさっていると、構造体とポンタを使わないプログラム
を使って解説しているHPを見つけました。
Elementary data structures - Queue
このHPでやっと、リングバッファーの仕組みが理解で
きました。
また、このプログラムを組むにあたって、割り算のあまりを
求める、計算をしなければなりません。この計算に、結構
な時間がかかります。一般的には、計算の時間を短縮す
るために2のN乗の数を使うそうです。2のN乗の数を使う
ことで、割り算のあまりを出す計算を、X & (N-1)とする
ことで可能にできるそうです。これで、飛躍的に計算を早く
できると書いてあるHPにも出会ました。この2のN乗の大き
さをバッファーの大きさにするそうで、計算時間の短縮がで
きます。
この & を使った計算方法が、
%(剰余)の最適化について
というHPに分かり易く書いてありました。
ということで、リングバッファーを使ったプログラムを
コーデングしていきます。
---自作MPGワイヤレス化 (12)---
16F1827への移植がほぼ終わったので、有線でのMPGと
ワイヤレスのMPGの動作について、テストしました。
Multi Step-Cycle Jog Step1.00の設定で
100パルス(MPG1回転)をSS経由でMachを動かして
ました。
ワイヤレスMPG ゆっくり回転 97.00
早めに回転 64.00
有線 MPG ゆっくり回転 100.00
早めに回転 100.00
というような結果で、ワイヤレスの方は、早く回転すると、
4割ほど、パルスが欠落するようです。
今回生成したA相とB相のパルスは、振幅を少し広めに
とりました。この振幅をもうちょっと狭くすると、応答もよく
なるような気がします。
送信と受信側で、送受信のデータの個数を計測してみ
ようと思います。
---自作MPGワイヤレス化 (11)---
外部セラロックを使わないで、内部PLLを使って、32Mhzで
動作させるために、16F1827に16F88のプログラムを移
植しました。
今回、移植するのに、丸々3日ほどかかりました。はまっ
てしまったのは、二つでした。
一つ目は、大いなる勘違いで、
for( ; ; )
の使い方を誤ってました。そのため、A相、B相のパルスが
正しく発生できませんでした。16F88で作った時は、パルス
の発生を前後の余裕をもってしていたので、その余裕が、
ロジックの誤りを吸収してくれたようです。初期値1~5まで、
5回のループを作りたいのに、
for(i=0;i<5;i++)
のような記述をしてました。これでは、0~4までの5回の
ループになってしまいます。正しくは、
for(i=1;i<=5;i++)
でした。
もう一つは、原因がよく分からないのですが、クロックを早く
すると、PORTが思った動作をしてくれなくなるようで、
PORTレジスタとLATレジスタ
と
PICとMikroC
に記事がありました。
早速、LATレジスタを使って組み直すと、見事動きました。
動いたプログラムです。ゴミが沢山残ってます。
main.c
特に、メインの処理では、switch分とif分が混在してます。
原因をあれこれ探るためにやった名残です。
もしかして、このように、PICは癖があるのかもしれませんね。
AVR等は、どうなんでしょうか。
**************************
* 追記 *
**************************
もしやと思い、諸兄の記事を参考に、ポートのビット操作
の間に’nop’を一ついれて動かして見ました。
あれほどなやんだのが嘘のように、通常の書き込みで、
LATレジスタを使わないで、動きました。
’nop’をいれたプログラムです。
main.c
やはり、諸兄はすごい。
---自作MPGワイヤレス化 (10)---
やっと動作確認できた、送受信の基板を使って、SS経由で、
MACHを動かしてみました。
不具合が出るかなと思いましたが、あっけなく動いてしまい
ました。
MACHの数字の変化は、有線でつないだMPGに比べてみて、
若干もたつくような印象でしたが、とりあえず動くことがわ
かりました。
今回の回路です。手直した方がいいところがあるかと思いま
すが、一応動作したもの覚え書きです。
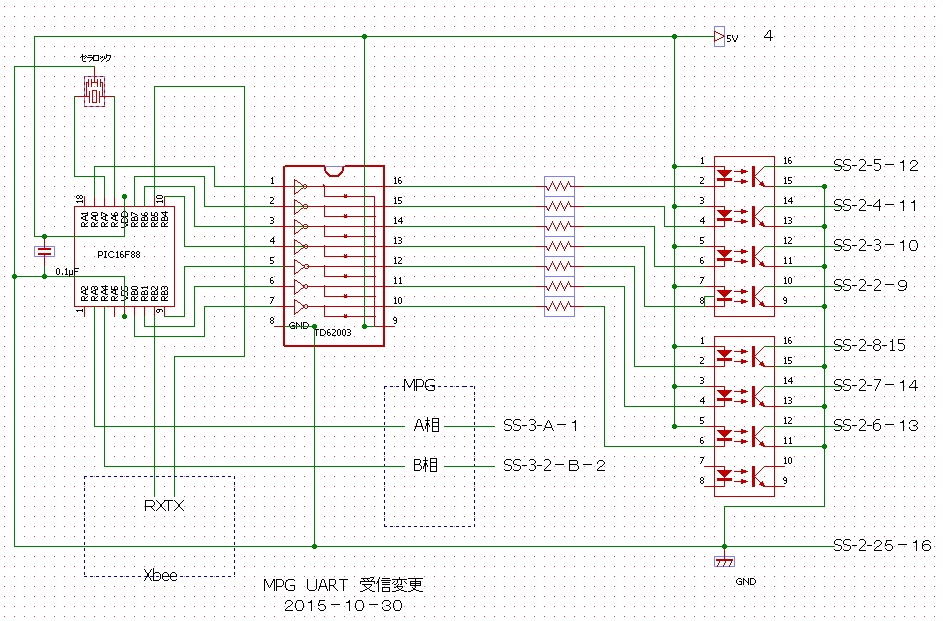
今回は、エンコーダーが作り出した信号でなくて、PICで作っ
た信号をSSに入れてますので、両者をオシロで比較してみ
ました。
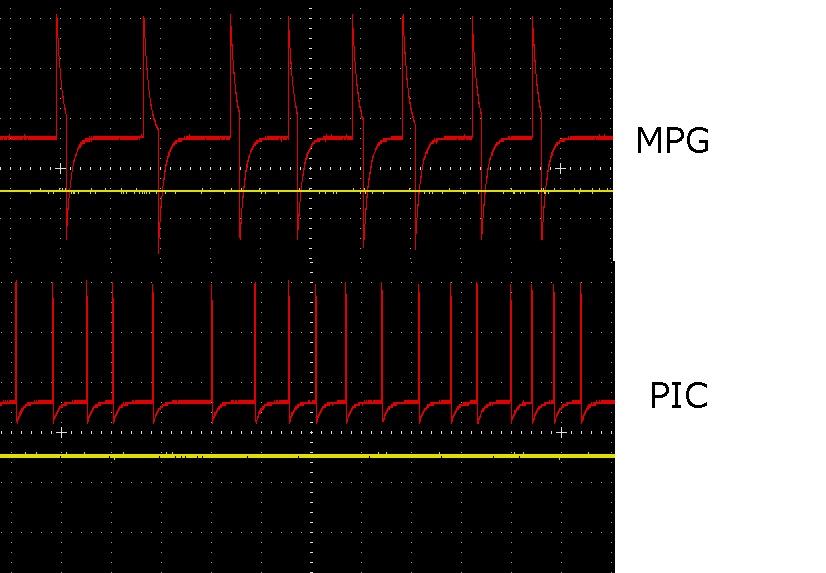
PICで作った信号の振幅がやや狭いようです。
広くするのは、簡単ですが、その分、応答速度が遅くなるような
気がするので、このままにしようと思います。
また、今回は、UART(USART)の通信速度は、9600bpsに
しました。PIC周期を32Mhzにすれば、倍の19200bpsに設定
しても大丈夫だと思いますので、後日変更してみようと思います。
ただ、受信側に使ってる16F88は、20Mhzまでなので、
ついでに購入しておいた16F1827に置き換えてみようと思い
ます。幸い、RXとTXのピンは、プログラムから変更できるようで
すが、16F88と同じ設定にできるようです。