諸兄のプログラムをもとに、多少変更を加えて、PCの
キーボードから、LEDのコントロールをするプログラムをつく
りました。
キーボードから、1~7の数字を押すことで、それに応じた
場所のLEDを点灯するプログラムです。
プログラムです。
ヘッダーファイルの「uart.h」と「uart.c」諸兄の作られたものを
そのまま使わせていただいています。
今回はポーリングのプログラムなので、次は、割込を使った
プログラムを作ってみようと思います。

mabo個人のサイトです。いろんなことを日記風に書いてます。場合によっては,間違った記載もあるということをご承知おきください。表題をクリックして,個別のページの最下部からコメントをお願いします。
諸兄のプログラムをもとに、多少変更を加えて、PCの
キーボードから、LEDのコントロールをするプログラムをつく
りました。
キーボードから、1~7の数字を押すことで、それに応じた
場所のLEDを点灯するプログラムです。
プログラムです。
ヘッダーファイルの「uart.h」と「uart.c」諸兄の作られたものを
そのまま使わせていただいています。
今回はポーリングのプログラムなので、次は、割込を使った
プログラムを作ってみようと思います。
新しい環境で、諸兄の書いてくれたシリアル通信のプログ
ラムを自分の環境で実現するべくもがいていました。
コンパイルはすんなり通るのに思った動作をしてくれません。
全部疑って、一つ一つつぶして、やっと思うような動作ができ
るようになりました。
まず、はまったのが、デバックのために、プログラムの間に
書き込んだ書式です。
int count=1000;
RA0=1;
RA1=0;
while(count>0){count--;}
count=1000;
RA0=0;
RA1=1;
while(count>0){count--;}
LEDが交互に点滅するはずですが、RA1に当てはまるLED
の変化がありません。
もしやと思い
PORTA=0b00000001;
PORTB=0b00000000;
・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・
PORTA=0b00000000;
PORTB=0b00000001;
のように変更したら動きました。「RA」の表記では、ポート
全体の値を書き換えてしまってるようでした。
よく見てみるとポートのビットの操作の記述が変更に変更に
なってました。
RA1→→PORTAbits.RA1
のように書かないとだめでした。
次にはまったのが、外部オシレーターの使用でした。
これは、デバックの方法の手落ちでした。外部オシレーター
でプログラムがうまく動いているのか確かめるのに、LEDの
点滅プログラムを挿入しましたが、ウエイトタイムが短くて
点灯しっぱなしで、うまく動いてないように見えてしまいま
した。何回、書き直したことか。
丸一日かかって、諸兄のプログラムの再現ができました。
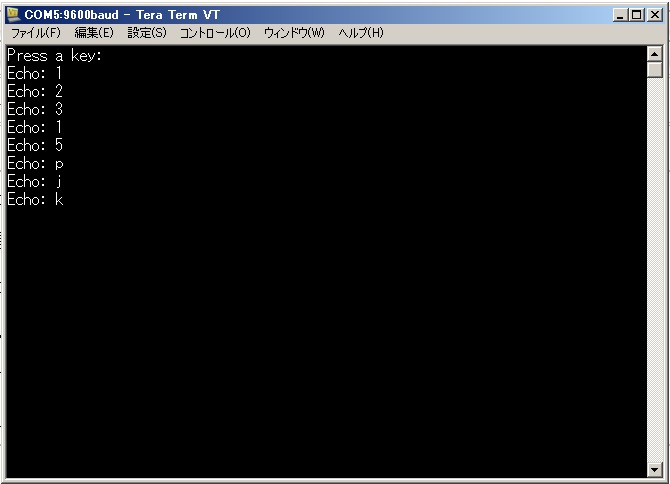
PICのUART機能を使って、PCからのキー入力を
エコーバックするプログラムです。
それから、とんでもないミスをしてました。RXとTXのピンアサ
インを私の教科書(キットで遊ぼう電子回路シリーズNo9)で
確認しながらしてましたが、これが間違いでした。
教科書のPICは、16F627AというPICで、今回使ったのは、
16F88というPICでした。同じ18ピンのICなので、同じだろう
たたかをくっくってたのが間違いでした。なんと、
16F627
TX--8ピン(RB2)
RX--7ピン(RB1)
16F88
TX--11ピン(RB5)
RX-- 8ピン(RB2)
なんと、TXとRXが入れ替わってました。これでは、動きません
ね。やはり、データシートみないとだめなんですねえ。
X IDEの開発環境で、いくつかプログラムを書いて見ました。
驚いたのは、「あまりにも親切過ぎる」でした。
最近の一太郎やWORDのように、やろうとしていることを
先読みして、自動でやってくれます。
一太郎等では、冒頭に句読点がくると、行間をつめて、
句読点を行の終わりの位置にもってくるということを自動
でやってくれます。これと同じように、いろいろ、自動でや
ってくれます。ただ、この「親切」がくせ者で、時に、意図し
たことと違う結果になってしまいます。行頭の禁則処理を
自動でやると、行ごとの文字間隔がちがって、見栄えが
悪くなるので、この辺が、一番いやなところです。
この意味で、最近のワープロソフトは、嫌いでした。さすが
使わなくなりましたが、PCになってからも、OASYSという
ワープロソフトを使い続けたのも、この親切さがなかった
からです。
さて、X IDEですが、使ってみて、ことのほか便利なようです。
何よりも、作成途中で、シンタックスエラーがあると、その都度
知らせてくれます。
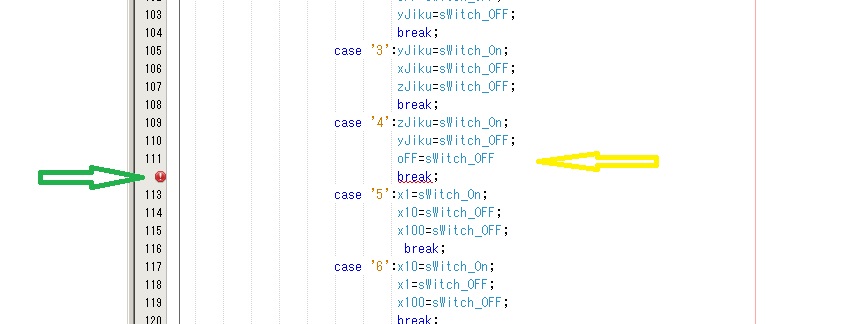
黄矢印の行に「;」がないシンタックスエラーがありますが、
次の行の緑矢印の所にきちんと、「びっくりマーク」が表示
され、エラーのあることを示してくれます。
「;」をつけてやると、ちょっとタイムラグがありますが、
びっくりマークは、すぐに消えます。
未定義の変数等についても同じように知らせてくれますの
ので、開発時間が短縮されるかもしれません。
PICのプログラムを作るにあたって、初めて使った、
MPLAB IDE V8.8という古典的な環境を使い続けてきまし
た。
ただ、世の中がどんどん進んでいて、このv8.8は古い
アーカイブに残っているだけで、メジャーなDLのリストには、
ありませんでした。
また、新しいことを覚えるのはしんどいのですが、諸兄の
プログラム古い環境に移植しようと思いましたが、あっさり
断念しました。
新しい環境のMPLAB® X IDEをインストール。この環境で
コンパイルしたら、一発でOKでした。
新しい環境では、一番の難物のCONFIGの設定も半自動で
おこなえるようで、なれれば、こちらの方がいいかもしれま
せん。
例によって、諸兄のHPを参考にしながら、プログラムの環境
を作ります。詳細は、arduino ide等で検索するといろいろあ
ります。私は、
を参考にしました。
詳細は、参考になる諸兄のHPがありますので、はまって
しまった所だけを書きます。
arduinoの公式HPに行って、WINのインストーラーをDLします。
黄色矢印をクリックします。
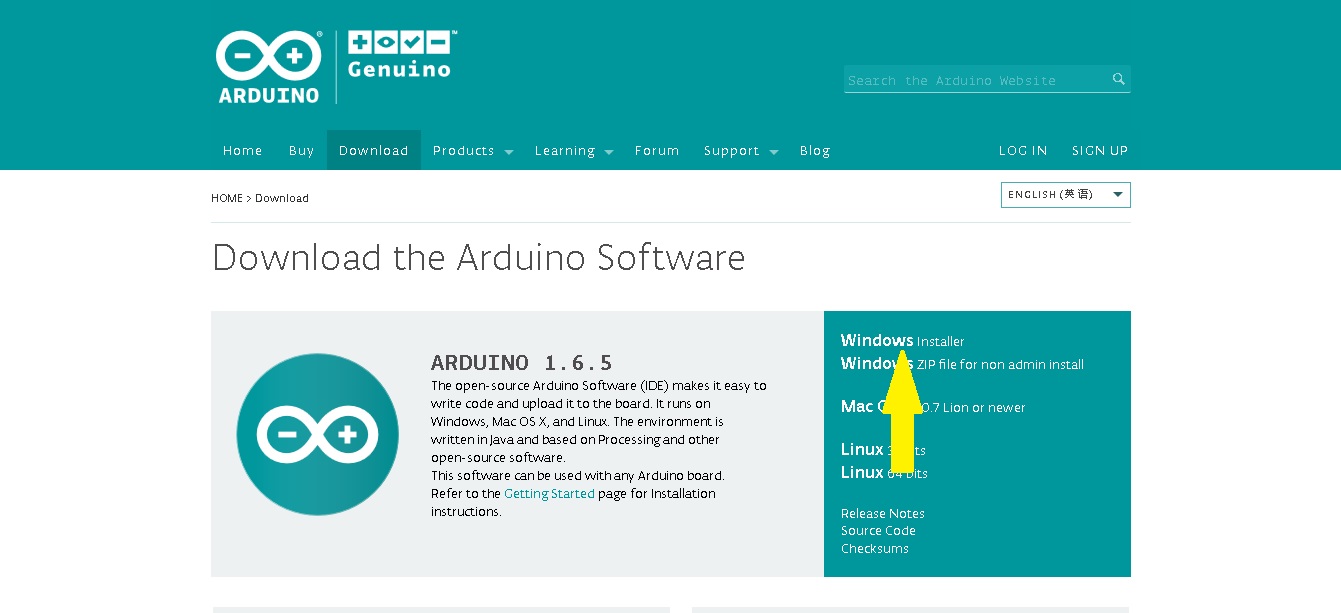
すると次のような画面になります。
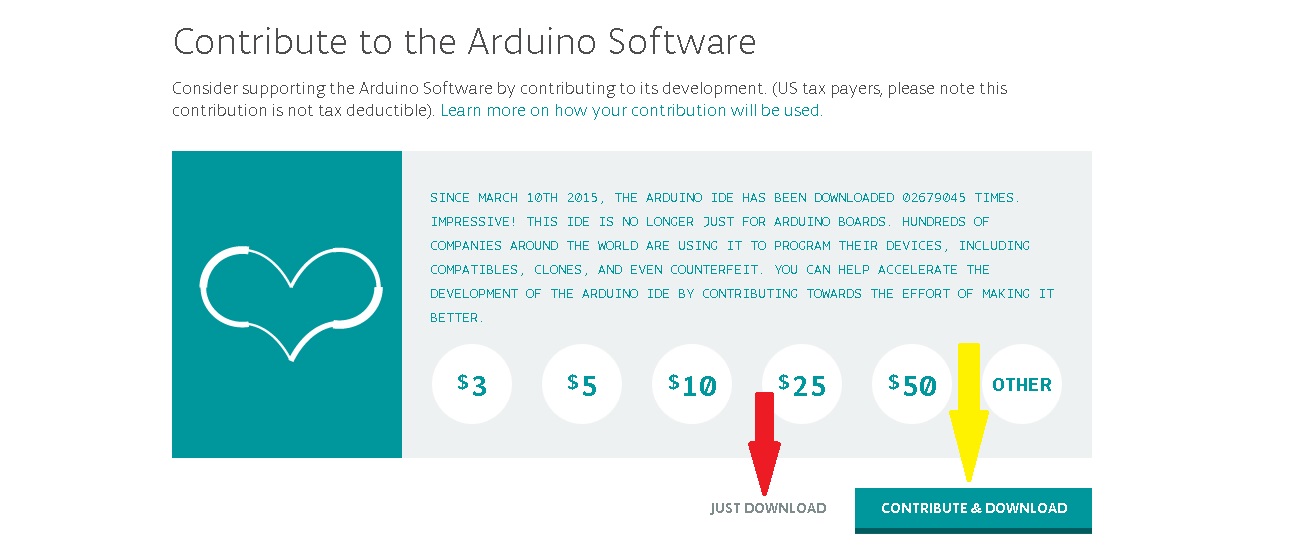
この画面で、黄色矢印をおすと、寄付の金額を入力しなければ
ならなくなります。どのHPを見ても有料だとは書いてありま
せん。有料なのかと思いましたが、なんのことはない、
赤の矢印を押せばよかったのです。赤矢印を押せば、すんなり、
DLできました。
DLしたファイルをインストールしました。本体がないままに
インストールしました。同時にドライバーもインストールしよ
としましたが、本体がないので、途中でキャンセルしました。
本体がきてから、本体をUSBに接続すると、すんなりとドライ
バーもインストールできました。デバイスマネージャーで確認
しても、びっくりマークはでていませんでした。
本日、注文していた「arduino」が届きました。

思ったよりもコンパクトな包装で、届きました。
本体は、考えてたよりもずっと小さく、5c強m×6cm強の
大きさです。
裏面をよく見てみると、裏に、細かい情報が書いてあります。
悪名高き某国製ではなく,イタリア製でした。印刷のシミかな
とも思いましたが、イタリアの地図まで、印刷してあります。
(矢印)
原産は、イタリアだったんですねえ。初めて分かりました。

しばらく遊べそうです。
以前から気になってましたが、PICを使えば事足りるという
ことで、手を出していませんでした。
ハンダを使わなくても、簡単に回路の試験等ができそうなの
で、「arduino」をいじってみることにしました。
入門キットなるものを購入しました。

NETであさると、PICとはそもそも考え方が違うようで、やは
り細かい制御をするには、PICにはかなわないようです。
Q&Aのサイトで、以下のような記述を見かけました。
当を得た解説だと思います。以下、抜粋です。
>arduinoは、ハードウエアの事を全く知らなくても、
>拡張シールドと、公開されたスケッチを組み合わ
>せる事により、マイコンで目的を達成する為の大
>変優れたシステムです。
>いかにも合理主義のヨーロッパ人が考えつきそう
>な発想です。
>しかも、誠に残念な事にarduinoのスケッチ言語は、
>C言語「風」なのであって、決してC言語では有りません。
>他の汎用のC言語を習得する事が目的の場合には、
>実は全く役に立ちません。
>内部に使用されている、AVRマイコンの汎用のC言語に
>移植して使う事すら不可能であり、細かな制御を行う為
>の言語としては出来ない事は有りませんが、細かな制
>御を行う場合には、汎用のC言語を使った方が遥かに
>簡単に記述が可能です。
マイコンのことを知らなくても、必要なシールド(拡張基盤)
を使い、公開されているスケッチ(プログラム)を使うことで、
比較的簡単に目的を果たすことができることで、広まった
ようです。
しかし、内部に使われている、AVRマイコンの日本語の書籍
は一冊しかなく、日本語の資料を得ることは、ほとんど不可能
のようです。
ということで、限界を見極めながら、いろいろ遊んでみようと
思います。
基板上のLEDを点滅させるスケッチ(プログラム)は、
#define LED_PIN 13
void setup() {
pinMode(LED_PIN, OUTPUT);
}
void loop() {
digitalWrite(LED_PIN, HIGH);
delay(3000);
digitalWrite(LED_PIN, LOW);
delay(3000);
}
これだけですんでしまうようです。まあ、手軽と言えば
お手軽です。一般のC言語では、main()に当たる関数が
loop()になってます。
---アドバイスをいただきました。コンパイルの過程で
main()関数が追加されるようで、使用者はただ、
意識はしなくてもいいとのことのようです。
細部については不明ですが、define等の記述は、c言語
と同じですね。
自作のPCを作って居た頃は、道具箱に転がっていた基盤の
ジャンパーピンだが、SmoothSteppeの設定の変更をするのに
必要になったので、近くのPCDEPOTに買いに行った、
本来なら、基盤に付属のような気もするが、残念ながら、付属
していなかったので。
行ってみて、高いのびっくり。こんなことなら、時間かかって
も○月電子で購入した方がよかった。
ちなみに値段を比べてみると、
○月 250個-----450円
PCDEPOT 10個----614円

ピンヘッダーもついているので、もっと安くなるが、一個、約2円。
それにくらべ、PCDEPOTは、一個約60円。なんと
約30倍の高額。

ただ、需要のことを考えると,一般のお店では、かなり少ない
はずなので、割高になるのは仕方ないことだと思うが。
時間がかかっても、送料かかっても、○月電子での購入の方が
よかったかなあとしきりに思う。
PF管の埋設が終わったので、ガレージに電気の配線をしまし
た。とりあえず、1本だけ配線をしましたが、とんでもない配線
をしました。

最初、写真のような結線をしました。不安になって、調べてみ
ると、間違いの配線でした。もし、これが実技試験でしたら、
致命的な欠陥ということで、一撃で不合格でした。
通常、100Vのブレーカーには、2P1Eのものが使われますが、
これは、過電流引きはずし素子が一つしかついてないもので、
Nの表記のある端子には、それがついていません。
ですから、黒の線をN(右側)につなぐと、ブレーカーの役目
を果たさなくなります。
工房の工事では、覚えていて、きちんと配線ができましたが、
今回は、間違ってしまいました。一日たって、直しました。

この写真が正解です。
もっとも、私が使ってるブレカーは、200V/100V兼用の
2P2Eのもので、過電流引きはずし素子が両極についてい
ますので、結線を間違えても、きちんと動作すると思うので
すが・・・・・・。
ペーパーの工事士には、こまったものです。
工房から車庫に電気を引くのに、PF管をつかいました。
PF管にVVFケーブルを入れて、埋設します。

写真を掲載する必要もないのですが、このような方法で、
よかったのかどうか、有資格者としては恥ずかしいです。
車庫側の引き込みボックス(正式な名前が分かりません。)です。

工房側の引き込みボックスです。

VVFケーブルを通し、PF管を接続します。

サドルで固定し、地面部分を埋設して、完了です。


資格があっても、仕事にしているわけではないので、何よりも
経験少ないです。経験を積んでいる仕事でなさってた方だと
いろんなノウハウが身についてるので、要領よく作業できる
はずですが、いかんせん、素人は、ノウハウがありません。
それに、だいたいの作業が一回こっきりのことが多いので、
経験の積みようがありません。この辺がDIYの限界でしょうね。
でも、やはり自分でいろいろやるのは、楽しいです。