だんだん元の形状をとどめなくなってきました。ベルトドライブにしてか
ら,今回は,テンションスプリングをエアー(ガス)スプリングに交換し
ました。

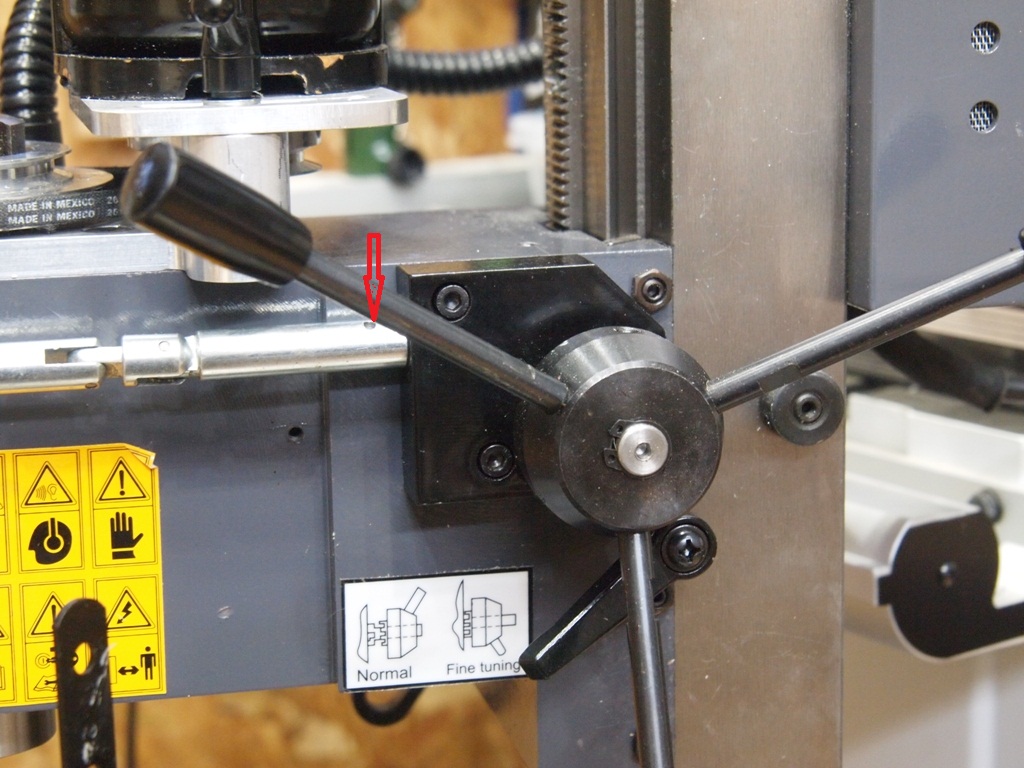
矢印でしめした,赤の角度が90度より狭くなっています。

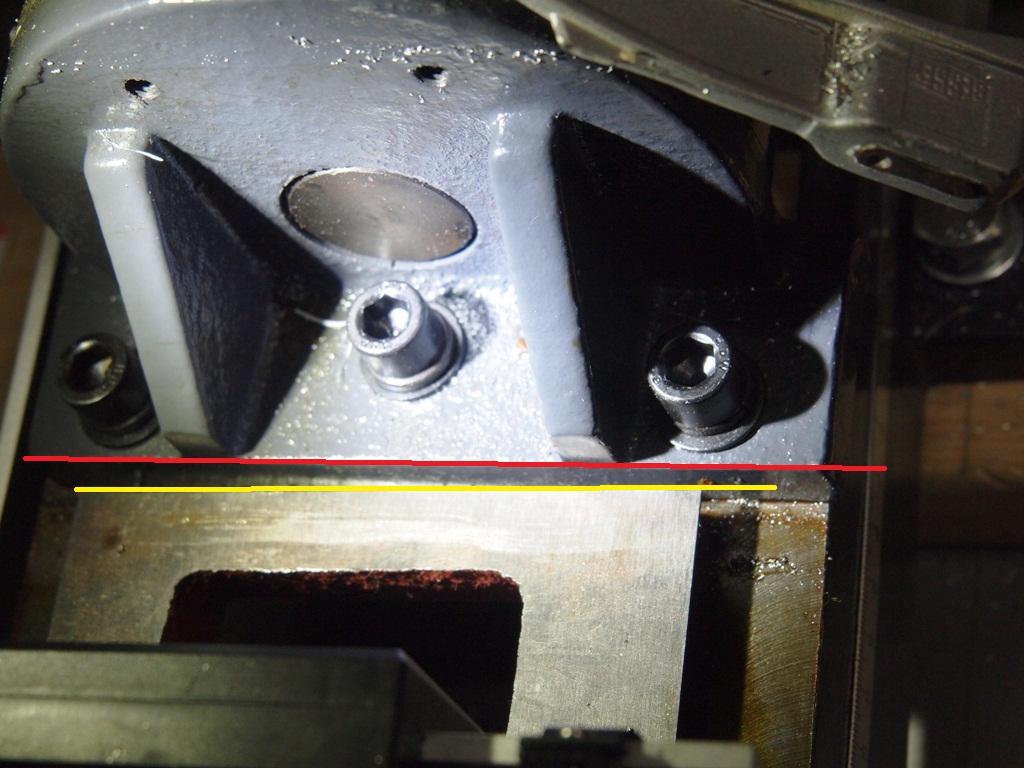
このキットは,どこ製かは書いてありませんでしたが,取り付けてみると
ヘッド取り付け部分のねじ切りが直角でないためか,やや前に傾いてい
ます。練習がてら後日,この部分を作り直してみようかと思ってます。
エアースプリングにしてから,可動範囲が,下方にやや広がりました。
前回部品破損の原因となった下方への移動も問題なくできますが,
気をつけないと,下がりすぎてしまいます。
ベルトドライブにして,そんなに使ってはいませんが,ベルトがいたん
できたので,同じ規格のベルトに交換しました。
6mm×330mmのベルトがなくて,やっと同じサイズのタイミング
ベルトをモノタロウで探して交換しました。ミシンのベルトのようです。

バンドー化学のバンゴランVベルトというベルトです。
このベルトに交換して,音が静かになったような気がします。