最後のチェックと調整がほぼ終わりました。
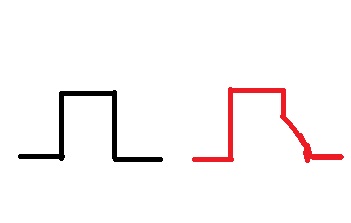
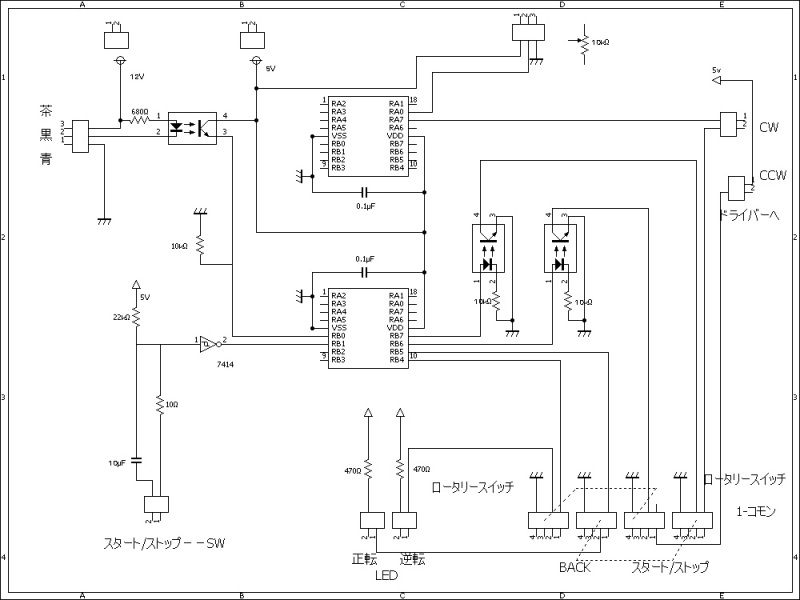
センサーまわりがうまくいきませんでした。原因を特定する
のにオシロでフォットカプラーの出力部分を見てみましたが、
接近するときと離れるときに、きちんとのこぎり型のパルス
がでてました。
立ち上がりの割り込みが一度しかかからなかったので、
センサーが一度働くと、フォットカプラーの出力で、電流が
0にならない状態なのかと思いましたが、原因はPICのよ
うでした。
一度Hightになるとどうしてか、Lowにならならなくて、立ち
上がりパルスの割り込みがかからないようでした。
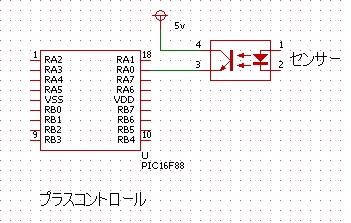
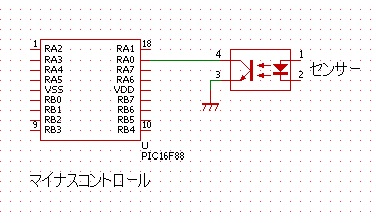
対応策がわからなかったので、入力方法を、
アックティブハイからアクティブローに切り替えてみました。
すると、やっと、思った動作ができるようになりました。
問題を特定するのに、ネットで検索しましたが、やはり同じような
原因でなやんでいる方がいたようです。同じTLP621での投書
がありました。解決策は書いてありませんでしたが、きっと
TLP621の問題といいうよりは、PIC側の問題だったんでしょうね。
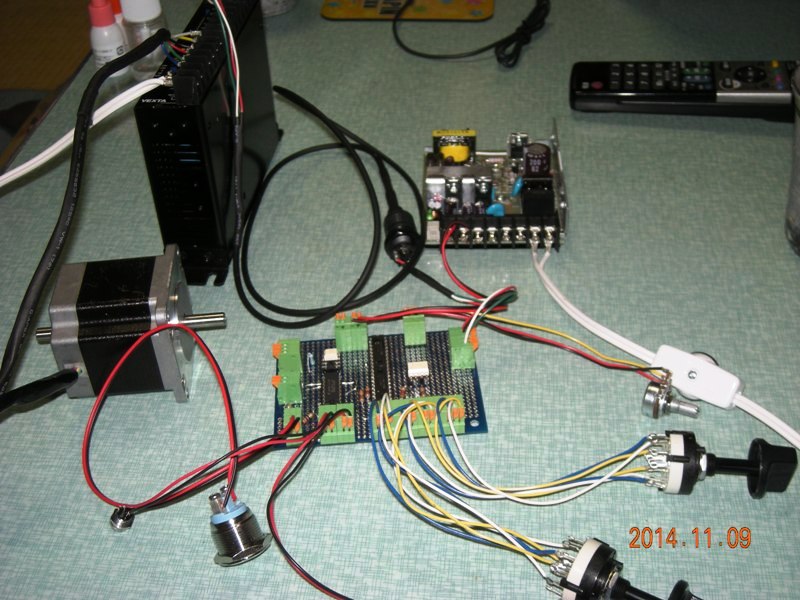
ケースに組みこんで、電気部分はほぼ完成です。
あとは、旋盤に取り付けるハードを作成します。
スイッチでのオンオフ、センサーでの逆転、の様子です。
ちょっと満足してます。