
今日,お昼をセブンイレブンで購入しました。
ところが,レジの人が,バーコードを読み取ったら,
レジから,ピーと音がしたかと思うと,陳列だなに,かけて
行きました。
期限が切れていて,同じ物もないので,この品物はお売りできない
とのことでした。
バーコードで,賞味期限ももかんりしえいるんですね。
はじめての経験でした。
---迷惑メール---
迷惑メールが頻繁に届きます。ある時,政治についてのアンケート
なるものが届いて,それに答えてから,一日に何通もくるようにな
りました。
指定メール受信拒否の設定をその都度していますが,
サフィックス?(前の部分)が同じで,ドメイン名を複雑に変えた,
メールが届きました。切りがないので,サフィックスを登録して,
やっと,その迷惑メールが届かなくなりました。
でも,しばらくするとまたくるんでしょうねえ。
---ネットから変更できました。---
郵便局の再配達,やっとネットから依頼できました。
追跡番号は間違いなかったのですが,種類番号が間違ってい
たようです。
「上記以外」の種別ですが,この種別は,3カ所にあり,
一般郵便物,ゆうパック,等では,別の扱いになるようです。
検索のプログラムが,「種目」以下しか検索しないようになって
いるんですね。これは,不親切だと思います。番号優先で,
検索,その次種目の検索の方が,今回のような間違い
は起こらないと思います。番号優先にすべきです。
---郵便局 追跡番号の間違い---
代金引換の郵便物が届きました。
例によって。,ネットより,再配達の依頼をしようと思い,
手続きを始めましたが,追跡番号の間違い,ということで,
先に進めません。
これって,自働受付電話でも,同じなんでしょうね。
明日,受付に郵便局に電話してみます。
---久しぶりに東京に行ってきました。---
訳あって久しぶり東京に行ってきました。運良く,
大人の休日倶楽部の格安切符が使えたので,通常7000円
ぐらいするところを5000円で往復が出来ました。
行きは新型の車両で,各座席には,コンセットがついており,
(赤い矢印の肘掛けの所についてます。)
 >
>
列車内で,WiFi(無線LAN)も使えるようになってました。
すごい進歩だなと思いました。
でも,やっぱり,東京の人のテンポにはついていけません。
のんびり,歩くのがやはりいいですねえ。
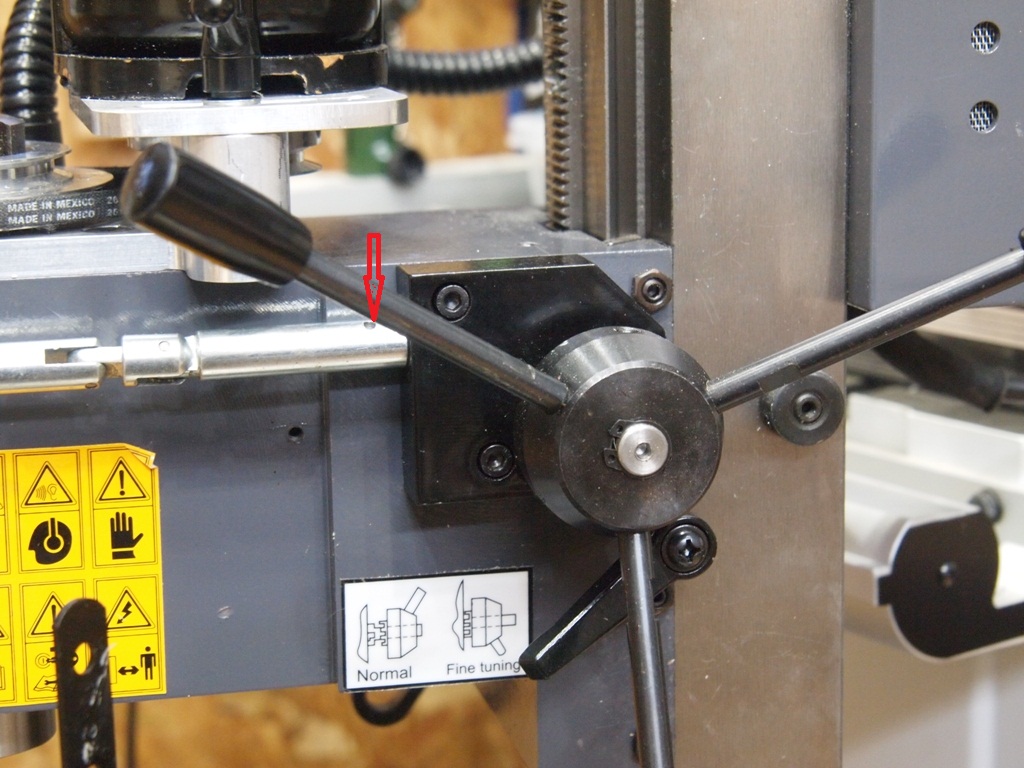
---ガススプリングに交換しました。(X2互換フライス改造)---
だんだん元の形状をとどめなくなってきました。ベルトドライブにしてか
ら,今回は,テンションスプリングをエアー(ガス)スプリングに交換し
ました。

矢印でしめした,赤の角度が90度より狭くなっています。

このキットは,どこ製かは書いてありませんでしたが,取り付けてみると
ヘッド取り付け部分のねじ切りが直角でないためか,やや前に傾いてい
ます。練習がてら後日,この部分を作り直してみようかと思ってます。
エアースプリングにしてから,可動範囲が,下方にやや広がりました。
前回部品破損の原因となった下方への移動も問題なくできますが,
気をつけないと,下がりすぎてしまいます。
ベルトドライブにして,そんなに使ってはいませんが,ベルトがいたん
できたので,同じ規格のベルトに交換しました。
6mm×330mmのベルトがなくて,やっと同じサイズのタイミング
ベルトをモノタロウで探して交換しました。ミシンのベルトのようです。

バンドー化学のバンゴランVベルトというベルトです。
このベルトに交換して,音が静かになったような気がします。
---部品交換完了---
部品が届いたので,だめになった部品交換しました。
写真が,だめになった部品です。

次の写真が,交換済みの写真です。壊れた部品には,
連結部分を止めるのにノックピンがさせるように穴があいてますが,
取り寄せた部品には,ノックピンの穴があいていませんでした。
赤矢印の部分です。
元々の部品には,穴が開いてますが,取り替えた部品にな
穴があいてないので,新しい部品を今までの所に,圧入
といっても,木槌で,たたいていれただけです。
---やってしまいました。フライス盤故障---
フライス盤で部品を作っていたところ,スピンドルを下に下
ろせなくなり,バールで無理して下ろしていたところ,案の状,
部品を破損させてしまいました。
よく見ると,ストパーが効いていてそれ以上下にながらないよ
うになっていましたが,無理したので,ギアーをハウジングに
食い込ませてしまったようです。

この中に,ギアーが入っていますが,ピン一本で,動かないように

なってるようで,無理な力をいれたので,スムーズに動かなく
なりました。
しかたがないので,部品をたのんで,交換することにしました。
届くまで,部品製作は,お休みです。
---便利な道具(センターファインダー)---
アメリカには,DIYに関して,便利な道具があります。おまけ
に値段も手頃です。それだけ,需要があるのでしょうね。
Coaxial Centering Indicator

という,ものがあります。約70ドルですから,
円安の日本円で,6000円ちょっとです。
ちなみに,この品物を売ってるお店の
littlemachineshop.com
は,対応もすばらしくよく,
安心して買い物ができますので,おすすめです。
注文から日本まで,4日前後で届きます。
クレジットカードでも決済できますが,PAYPALが使えますので,
クレジットカードのリスクも減らせます。
フライス盤で,ワーク(工作物)の円や円柱の中心を見つ
ける物です。通常は,てこ式ダイヤルゲージをつかって,
何回も調整しながら,見つけますが,これだと,たやすく,
見つけることが可能です。
こんな使い方します(ビデオ)。
ほしい物リストに加えることにします。
---真鍮・鉄(SS400)を加工してます。---
道具やら,材料がそろったので,フライス盤で,金属加工
をやってます。
真鍮は,結構おもしろいように削れますけど,鉄は,こつ
がいるようです。
我が家の,フライス盤,は,諸兄のHPで取り上げられてる
ようにコラムをふくめて,全体の剛性が足りないようです。
それに,テーブルの移動範囲が,後一歩,たりないです。
来月になったら,テーブルをアップグレードしようと思います。