オシロスコープを使っていろいろやってましたが、ある時
に、波形がパルス状になりました。
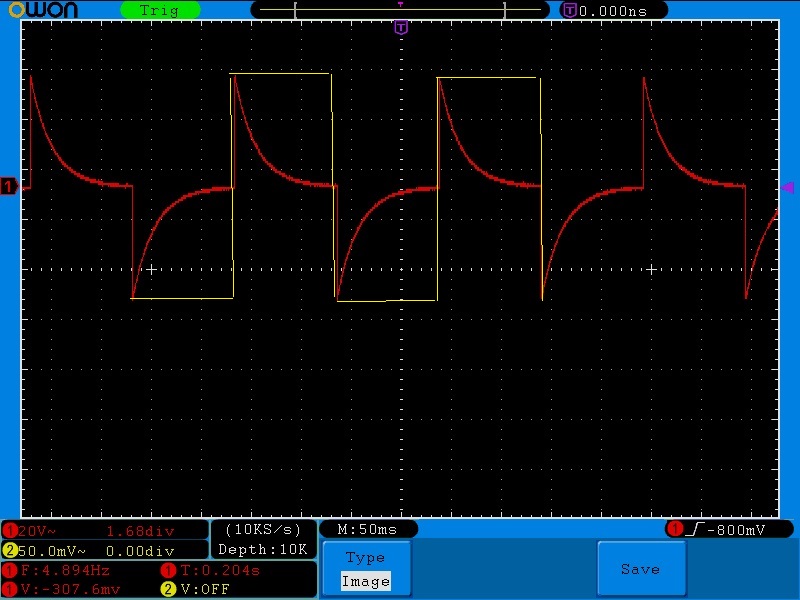
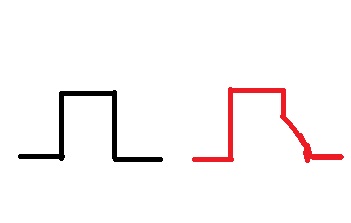
黄色の線が本来の波形だと思いますが、赤のように
変形してしまうようです。
周期が長くなるとこの傾向が強くでるようでした。
調べている対象物が原因かなと思いましたが、どうも違う
ようでした。
オシロのマニュアルを見たり、周波数をいろいろ変えてみて
くらべてみました。
周波数が低くなるとその傾向が強いので、どうもプローブの
特性のようでした。
周波数が高いと、変形はめだちませんが、
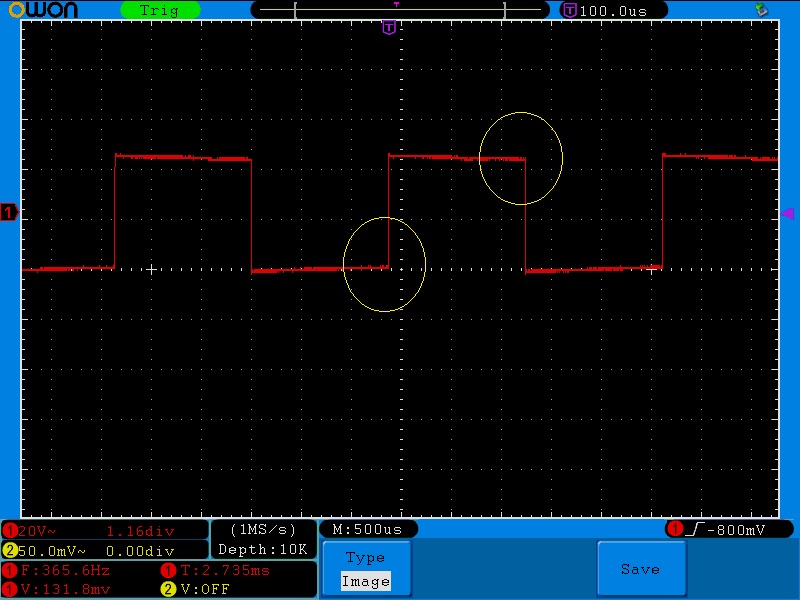
周波数が低くなると、○をつけた部分で、立ち上がりは上に、
立ち下がりが下にひっぱらられるように変形するようです。
上の写真よりもうちょっと低い周波数では、顕著になります。
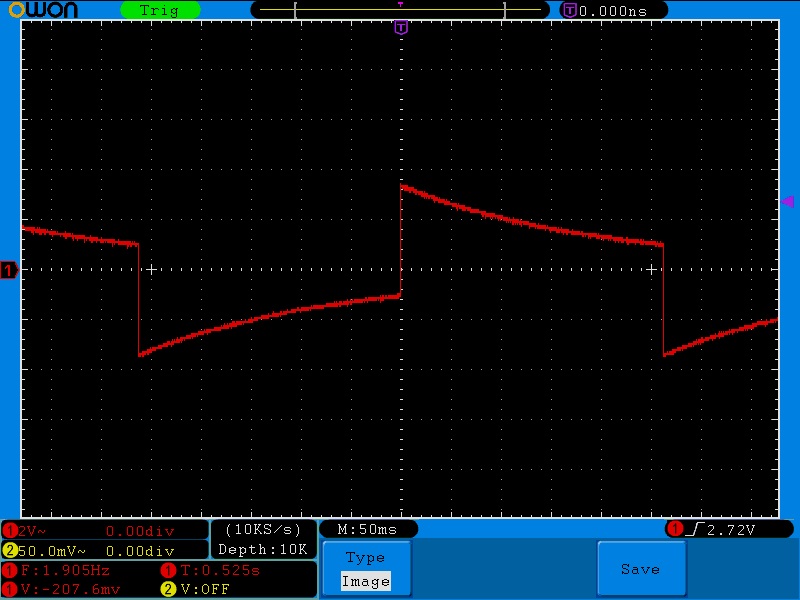
ます。プローブの特性だったんですねえ。一つまた、勉強し
ました。