X IDEの開発環境で、いくつかプログラムを書いて見ました。
驚いたのは、「あまりにも親切過ぎる」でした。
最近の一太郎やWORDのように、やろうとしていることを
先読みして、自動でやってくれます。
一太郎等では、冒頭に句読点がくると、行間をつめて、
句読点を行の終わりの位置にもってくるということを自動
でやってくれます。これと同じように、いろいろ、自動でや
ってくれます。ただ、この「親切」がくせ者で、時に、意図し
たことと違う結果になってしまいます。行頭の禁則処理を
自動でやると、行ごとの文字間隔がちがって、見栄えが
悪くなるので、この辺が、一番いやなところです。
この意味で、最近のワープロソフトは、嫌いでした。さすが
使わなくなりましたが、PCになってからも、OASYSという
ワープロソフトを使い続けたのも、この親切さがなかった
からです。
さて、X IDEですが、使ってみて、ことのほか便利なようです。
何よりも、作成途中で、シンタックスエラーがあると、その都度
知らせてくれます。
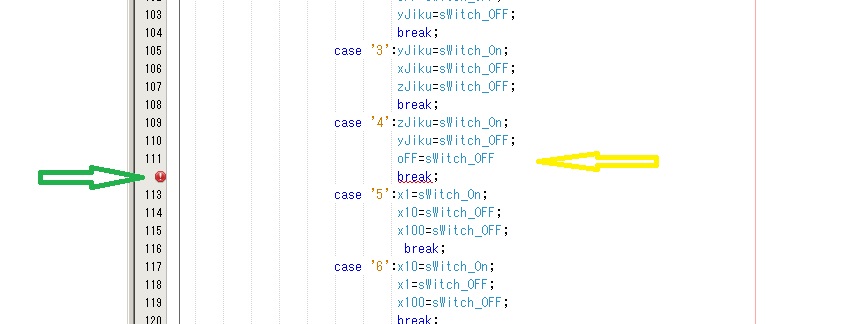
黄矢印の行に「;」がないシンタックスエラーがありますが、
次の行の緑矢印の所にきちんと、「びっくりマーク」が表示
され、エラーのあることを示してくれます。
「;」をつけてやると、ちょっとタイムラグがありますが、
びっくりマークは、すぐに消えます。
未定義の変数等についても同じように知らせてくれますの
ので、開発時間が短縮されるかもしれません。