
ブログンプラスが2.6.10にバージョンアップされていたので,
早速(遅ればせながら)バージョンアップしました。
どこが変更になったのか分かりませんが,フィアーフォックスの
プラウザでは,投稿画面でのプレビューができなくなりました。
フォーラムでも若干話題になっているようですが,その原因は,
まだ分からないようです。IEでは,問題なく表示されるようです。
---コメントが出来ませんでした---
あまり大きな影響はないのですが,どうやら,このブログの
スキンは,投稿やトラックバックができなかったようです。
中身が分からないので,手のつけようがなかったのですが,
コメントのの投稿だけは,できるようになりました。
以前,コメントやらトラックバックやらが,外国からのロボット
の書き込みで,数千になったことがありました。スパムが,
ないのは,いいのですが。
トラックバックは,大幅な修正がいるようで,ちょっと,ため
らっています。
---カレンダー写真への採用---
今日,株式会社カミンから,写真
採用の連絡がありました。
レオの写真が採用されるのは,二度目ですが,今回は,「大判犬めくり」
に採用されました。ちょっと写真が小さいのが難点ですが,
景品で,送られてくるカレンダーが楽しみです。なかなか,目的
の「犬めくり」には,採用されません。また,写真撮って,2014年版
に応募しようかなと思います。
---最近のレオ---
毎日,残暑が厳しいので,看板犬のレオは,ばて気味です。
このところ,お散歩の声を聞いても,あまり喜びません。
暑いし,足の裏の調子もちょっとよくないからかもしれません。
アレルギーで,赤く晴れて,かゆそうなので,シッカロールなんか
塗ってあげてます。

---電源部の組み立てとテスト通電が済みました---
ケースに組み込む電源部の制作が終わりました。ちょっと,仰々しい
かもしれませんが,まあ,その辺は,しろうとなので,片眼つむって
ください。LM315という三素子レギレーターを使って組たてて,出力
電圧が5Vになるように調整しました。固定でもよかったのですが,
使い回しなんてことも考えて,半固定の電圧にできるようにしまし
た。
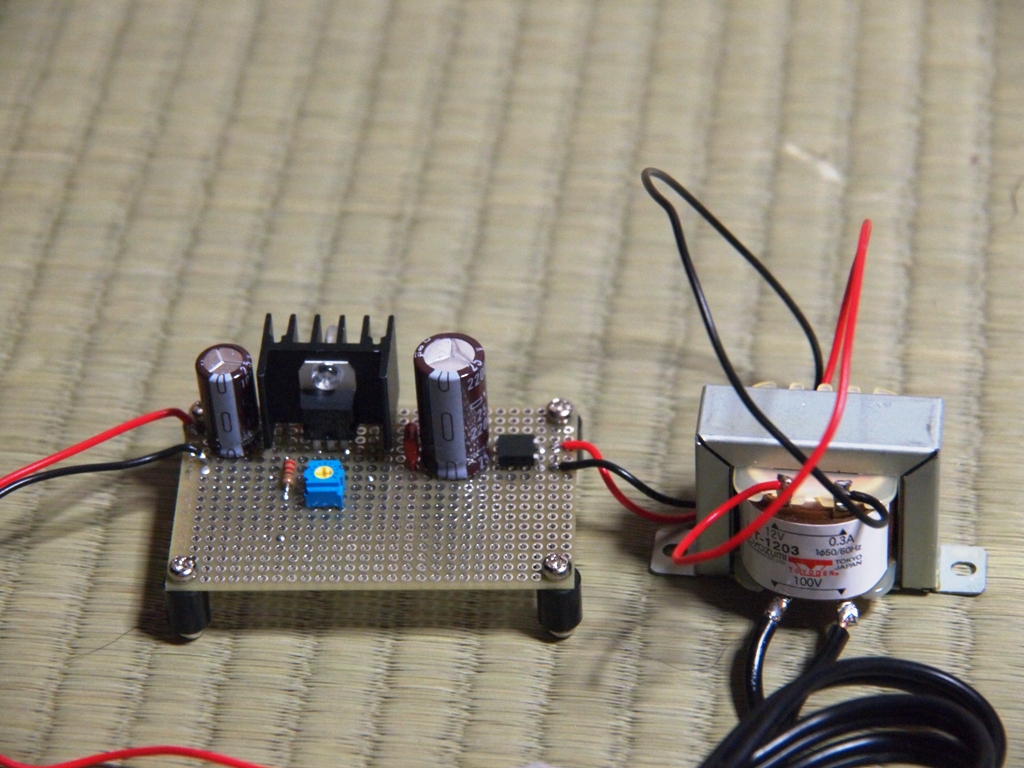
この基板には,本体電源切断用のリレーを組み込みます。
---Cのプログラムです。---
冗長なプログラムですが,Cのプログラムです。PICに密接し
た設定は,本の丸写しです。
このプログラムは,タイムアップすると,無限ループに入る
ようにしています。本番では,ここを,変更して,自分自身
の電源を切るようにします。アセンブラーでは,各種フラグを
ビット操作でしていますが,本プログラムでは,贅沢にフラグ
にいint型の整数を使ってます。データーメモリに余裕がある
のでこの方がすっきりします。ただ,計算スピードやら,コンパイル
後のメモリ等については,よく分かりません。
PICに密接した設定や,割り込みの処理のプログラムがまだ,
よく分からないところがありますが,その他は,PC用のプログラム
とあんまり変わりません。
/******************************************
99タイマーテスト
********************************************/
#include
int sw3;
int sw2;
int sw1;
int sw3_data;
int sw2_data;
int sw1_data;
int sw12_data;
int sec1_data;
int sec10_data;
int min1_data;
int min10_data;
int count;
int count1;
int start_stop;
int entyou;
int buzzer;
int dengen;
int sec1_data_w;
int sec10_data_w;
int min1_data_w;
int min10_data_w;
void count_up(void);
void InitInterTimer0 (void);
void WaitTime (int cnt);
void datahozon(void);
void datasaisettei(void);
void main(void){
CMCON=0X07; //1,2,17,18
PORTA=0xFF;
PORTB=0xFF;
TRISA=0x1C;
TRISB=0x00;
RA0=0;//ブザーoff
RA1=0;//電源オフ
RA7=0;//本体操作
sec1_data=0;
sec10_data=0;
min1_data=0;
min10_data=0;
sw3=1;
sw2=1;
sw1=1;
sw3_data=1;
sw2_data=1;
sw1_data=1;
sw12_data=1;
min1_data_w=min1_data;
min10_data_w=min10_data;
start_stop=0;//初期値ストップ
buzzer=0;
dengen=0;
entyou=0;
// タイマ0割込み設定関数の呼び出し
InitInterTimer0();
// 割込み全体の許可
GIE = 1;
for( ; ; ){
//キー入力チェック1
if(RA2==0){
sw3=0;// スタートストップ
}
if(RA3==0){
sw2=0;//SW2 一分
}
if(RA4==0){
sw1=0;//SW1十分
}
//LED表示
PORTB=0xf0 | sec1_data_w;//秒1位表示
RB4=0;
_delay(250);
RB4=1;
PORTB=0xf0 | sec10_data_w;//秒10位表示
RB5=0;
_delay(250);
RB5=1;
PORTB=0xf0 | min1_data_w;//分1位表示
RB6=0;
_delay(250);
RB6=1;
PORTB=0xf0 | min10_data_w;//分10位表示
RB7=0;
_delay(250);
RB7=1;
//キー入力チェック2
//スタートストップチェック
if(RA2==0){
if(sw3==0){
if(sw3_data==1){
sw3_data=0;
if(start_stop==1){
start_stop=0;
}
else{
if(min1_data_w>0 || min10_data_w>0){
datahozon();
}
start_stop=1;
buzzer=0;
}
}
}
}
else{
sw3_data=1;
sw3=1;
}
//**************************************
//1分操作
if(RA3==0){
if(sw2==0){
if(sw2_data==1){
sw2_data=0;
if(start_stop==0){
sec1_data_w=0;
sec10_data_w=0;
if(min1_data_w<9){
min1_data_w++;
}
else{
min1_data_w=0;
}
}
}
}
}
else{
sw2_data=1;
sw2=1;
}
//**************************************
//10分操作
if(RA4==0){
if(sw1==0){
if(sw1_data==1){
sw1_data=0;
if(start_stop==0){
sec1_data_w=0;
sec10_data_w=0;
if(min10_data_w<9){
min10_data_w++;
}
else{
min10_data_w=0;
}
}
}
}
}
else{
sw1_data=1;
sw1=1;
}
//****************************************
//同時操作
if(sw2_data==0){
if(sw1_data==0){
if(sw12_data==1){
sw12_data=0;
if(start_stop==0){
min1_data_w=0;
min10_data_w=0;
}
}
}
else{
sw12_data=1;
}
}
else{
sw12_data=1;
sw1=1;
sw2=1;
}
//*******ブザーオンオフ*********************************
if(buzzer==1){
if(min1_data_w==0 && min10_data_w==0 && sec10_data_w==0 && sec1_data_w==0){
if(RA0==0){RA0=1;}
}
if(min1_data_w>0 || min10_data_w>0 || sec10_data_w>0 || sec1_data_w>0){
if(RA1==0){RA1=1;}//電源オン
}
}
if(buzzer==0){
if(RA0==1){
RA0=0;
entyou=0;
sec1_data_w=0;
sec10_data_w=0;
datasaisettei();
}
}
}
}
// 割込みサービスルーチン
static void interrupt isr(){
//****************延長処理*********************
if(entyou==1){
if(count<1950){
count++;
}
else{
if(sec1_data_w>0){
sec1_data_w--;
buzzer=1;
count=0;
}
else{
if(sec10_data_w>0){
sec10_data_w--;
sec1_data_w=9;
count=0;
}
else{
RA7=1;//******************本体電源もオフ*********************
for( ; ; ){ }
}
}
}
}
//***************カウントダウン**************
if(start_stop==1){
if(count<1950){
count++;
}
else{
if(sec1_data_w>0){
sec1_data_w--;
buzzer=1;
count=0;
}
else{
if(sec10_data_w>0){
sec10_data_w--;
sec1_data_w=9;
count=0;
}
else{
if(min1_data_w>0){
min1_data_w--;
sec10_data_w=5;
sec1_data_w=9;
count=0;
}
else{
if(min10_data_w>0){
min10_data_w--;
min1_data_w=9;
sec1_data_w=9;
sec10_data_w=5;
count=0;
}
else{
count=0;
entyou=1;
start_stop=0;
sec1_data_w=9;
sec10_data_w=5;
}
}
}
}
}
}
//***********************カウントダウン終了********************
// タイマ0割込みフラグをクリア
T0IF = 0;
}
void InitInterTimer0 (void){
// クロック源を内部クロックに設定
T0CS = 0;
// プリスケーラをタイマ0に割り当て
PSA = 0;
// プリスケーラ値を2に設定
PS2 = 0;
PS1 = 0;
PS0 = 0;
// TMR0レジスタをクリア
TMR0 = 0x00;
// タイマ0割込みフラグをクリア
T0IF = 0;
// タイマ0割込みの許可
T0IE = 1;
}
// 待ち時間関数の呼び出し
void WaitTime (int cnt){
while(cnt > 0){
cnt--;}
}
void datahozon(void){
min1_data=min1_data_w;
min10_data=min10_data_w;
}
void datasaisettei(void){
min1_data_w=min1_data;
min10_data_w=min10_data;
}
---予定変更 16F84A~16F627A ---
HPにのっていた99タイマーをちょっと改良して,半田ごてタイ
マーを作る予定でいましたが,16F84Aは端子が,どうしても2
本たりないで,上位互換である,16F627Aに変更して,作る
ことにしました。もう少し調べれば,16F627Aよりもメモリーが
が多くて,安いPICがあったのですが,失敗しました。これも,
身銭を切ったお勉強です。
テスト基盤,
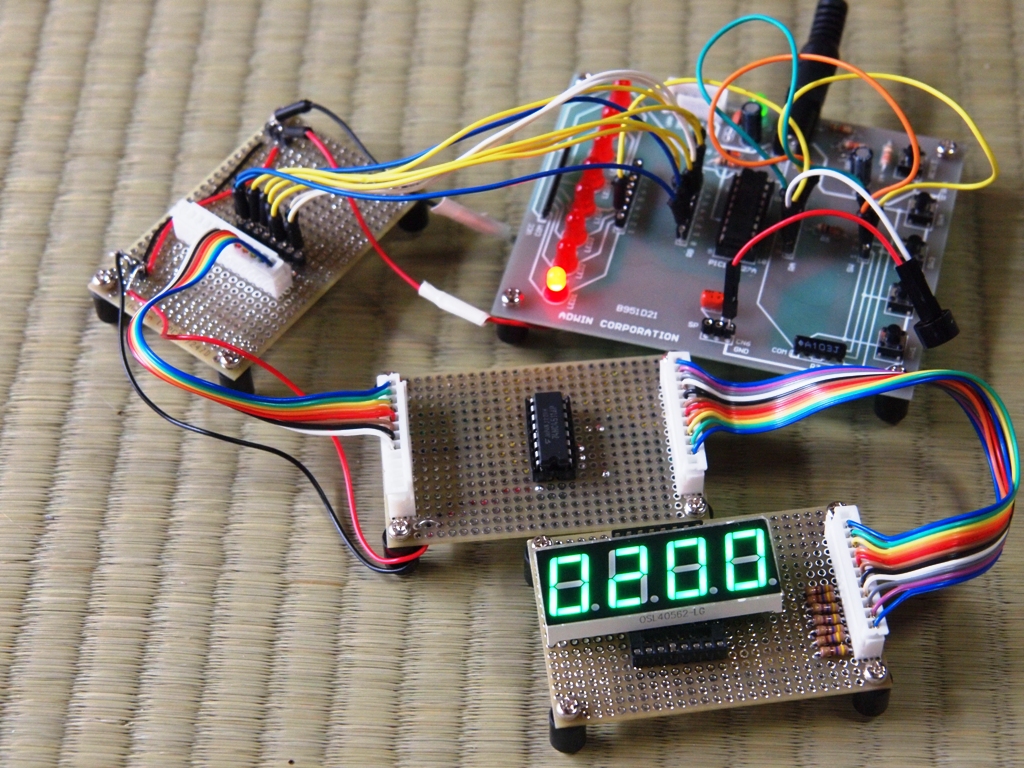
でのプログラムの作成もやっと完成しそうです。今まで使って
いた半田ごてタイマーと違うところは,使える時間を99分まで
の間で設定できることです。
(時間の設定)→(カウントダウン)→
(ブザー)→(一分以内にスタートボタンを押す)
→(最初の設定時間に戻る)→(カウントダウン)
を繰り返します。一分以内にボタンを押さないと,本体
も含めて電源が切れるようになります。
当初 アセンブラー(HPにあったもの)をちょっと改良
するつもりでしたが,プログラムの半分ぐらいは,意味
が分かったのですが,面倒なので,フリーのCコンパイ
ラーで,くみなおしました。プログラムの大きさが心配
でしたが,PICの容量の85%ぐらいでおさまりました。
---タイマーを作っています。---
PICを使ったタイマーを作ってます。やっと7セグメントLEDの
表示部分だけが出来ました。テスト点灯で,一カ所だけ,光ら
せています。
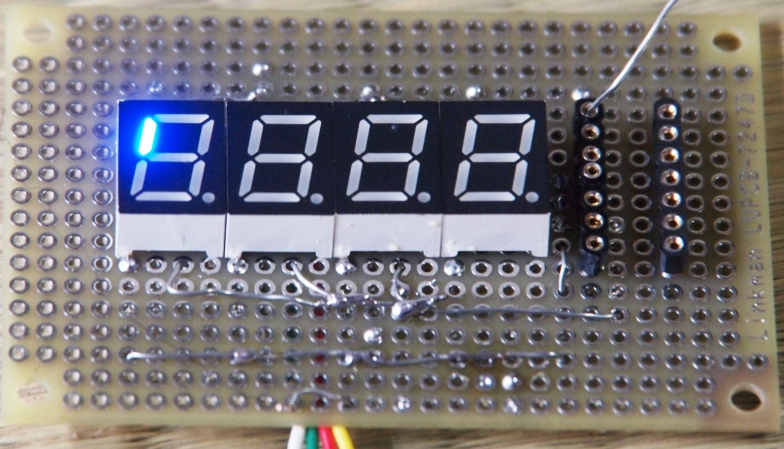
このタイマーのハードにSSRを組み込んで,半田ごてタイマー
にしようと思います。
ハードの追加は,PIC16F84の開いている端子にSSRを接続
するだけなので,それほど難しくはありませんが,プログラム
の変更が大変だろうなあ。
---PICプログラミング---
友人の影響で,PICのプログラムをいじり始めました。
アセンブラーとCコンバイラーがどちらも無料であるので,
DLしてあれこれ始めました。
最初にCであれこれやりましたが,まあ,比較的すんなりいき
ましたが,アセンブラーではまりました。
なんと,
LIST
と
LIST
の違いで,コンパイルエラーとなりました。どかが違うかというと,
LISTの前に空白があるかないかの違いでした。