 Home
Home Item
Item �V�K���e
�V�K���e �A���o��
�A���o�� ���[�h����
���[�h���� �ߋ����O
�ߋ����O Topic
Topic Notice
Notice Admin
Admin
48���Ԉȓ��̋L����  �ŕ\������܂�
�ŕ\������܂�
�ŕ\������܂�
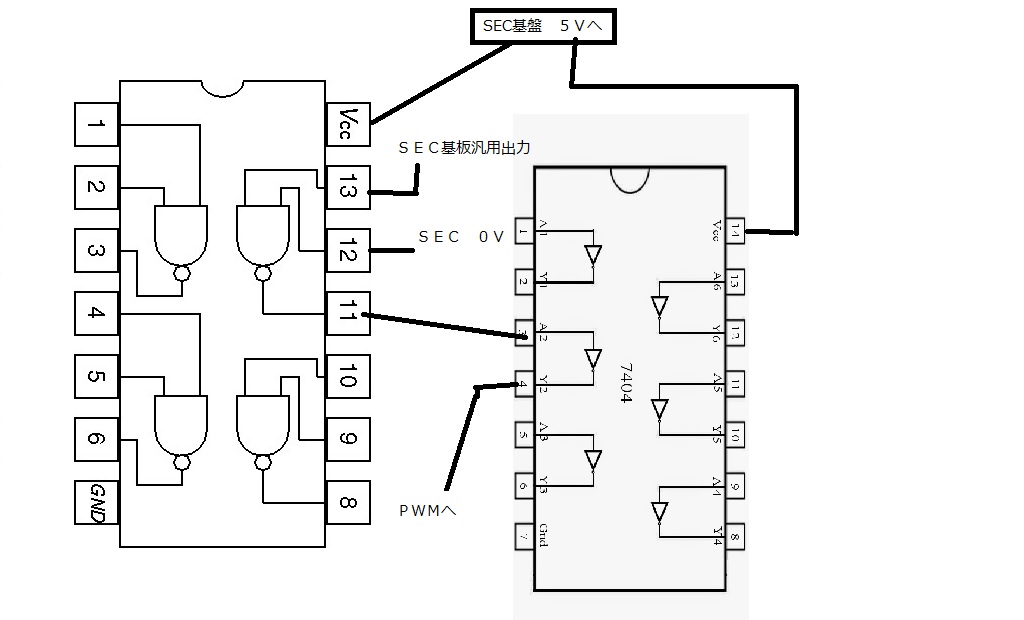
���[PWM�M��
�s�q����C�K�w���[���Ȃ��Ă��܂����̂ŁC�V�X�����Ă܂��B
�����@�r�r�q�@�a�x�@�r�r�@�Ŏg�����̂́C
SN�T�SHC�O�Q�@�Ə����܂������C
���ۂɍ������H�ł́@�V�S�g�b�O�Q�@�ł����B
http://akizukidenshi.com/catalog/g/gI-11489/
�ɂ���܂��B
���ꂩ��C����C�o�v�l�̏o�͂Ŏg���ƂȂ�ƁC
������Ɩ�肪���邩���ł��B
�Ƃ����̂́C�M���]���Ďg���Ă܂��̂ŁC
�o�v�l�̐M�������]���܂��B
����Ƒ����C�R�O���̏o�͂̂͂����C�V�O���ɂȂ�悤�ɂȂ�Ǝv���܂��B
�ł�����C�o�v�l�ł���g���ƂȂ�ƁC����ɘ_����H����āC
����ɔ��]�����Ȃ��Ƃ��߂����ł��ˁB
�@�i�|�j
�@�@�@�@���i�{�j���i�[�j
�@�i�|�j
�@�Ƃ������ƂŁC
�@�@�@�m�n�q��H���m�n�s��H�i�V�S�g�b�O�S���H�j
�Ȃ�Ă��Ƃɂ���悤�ł��傤���B
����ƁC�o�v�l�̊�{���g�����P�O�O�ʂƒႢ�Ƒ��v�̂悤�Ȃ������܂����C
�_���h�b�̉������x�������Ă��Ȃ��Ƃ��߂����ł��ˁB
���̕ӂ͂�����ƁC���̗͗ʂ����Ă邩�ȁB
�Ƃ������Ƃł́C��ŁC���̕ӂ��C�I�V�����Ō��Ă݂�����
�v���܂��B
�����@�r�r�q�@�a�x�@�r�r�@�Ŏg�����̂́C
SN�T�SHC�O�Q�@�Ə����܂������C
���ۂɍ������H�ł́@�V�S�g�b�O�Q�@�ł����B
http://akizukidenshi.com/catalog/g/gI-11489/
�ɂ���܂��B
���ꂩ��C����C�o�v�l�̏o�͂Ŏg���ƂȂ�ƁC
������Ɩ�肪���邩���ł��B
�Ƃ����̂́C�M���]���Ďg���Ă܂��̂ŁC
�o�v�l�̐M�������]���܂��B
����Ƒ����C�R�O���̏o�͂̂͂����C�V�O���ɂȂ�悤�ɂȂ�Ǝv���܂��B
�ł�����C�o�v�l�ł���g���ƂȂ�ƁC����ɘ_����H����āC
����ɔ��]�����Ȃ��Ƃ��߂����ł��ˁB
�@�i�|�j
�@�@�@�@���i�{�j���i�[�j
�@�i�|�j
�@�Ƃ������ƂŁC
�@�@�@�m�n�q��H���m�n�s��H�i�V�S�g�b�O�S���H�j
�Ȃ�Ă��Ƃɂ���悤�ł��傤���B
����ƁC�o�v�l�̊�{���g�����P�O�O�ʂƒႢ�Ƒ��v�̂悤�Ȃ������܂����C
�_���h�b�̉������x�������Ă��Ȃ��Ƃ��߂����ł��ˁB
���̕ӂ͂�����ƁC���̗͗ʂ����Ă邩�ȁB
�Ƃ������Ƃł́C��ŁC���̕ӂ��C�I�V�����Ō��Ă݂�����
�v���܂��B
 mabo
mabo  2019/05/18(Sat) 22:49 No.1469
2019/05/18(Sat) 22:49 No.1469
Re: ���[PWM�M��
 mabo���͂悤�������܂��B
mabo���͂悤�������܂��B�\�̋L�����Ă��܂��B
�����^��̎d�|�������ł��ˁI�I
�Ɛl��������Ƃ����ł��ˁB
�x�@�ɏ؋����o��������Ǝv���܂��B
���Ƃ������Ƃł́C��ŁC���̕ӂ��C�I�V�����Ō��Ă݂�����
�v���܂��B
�I�V���������Ă����ł��ˁB
���ʂ����������狳���Ă��������B
�_����H�̕��A����Ȃ��Ă��܂����ˁB
��͂�A��R�̈�[�������藣���āAGND�ɂȂ��Ȃ��������������ł����ˁ`�B(;^��^)
������ML4�ł����A���[�^�[�����܂����B
���[�^�[�̑傫�����猾���āAAC�T�[�{���[�^�[�̂悤�ł��B
�����Ȃ�ƁA�T�[�{�A���v�ƃT�[�{���[�^�[���悤�ɂȂ�B
���K�I�ɖ������ȁ`�B���t�I�N���ȁi��
�ł��A���łɁA�O�H�̃T�[�{�A���v�Z�p����������܂����B
�����A���̃y�[�W�ł����Ǝv���܂��B
����ɂ���
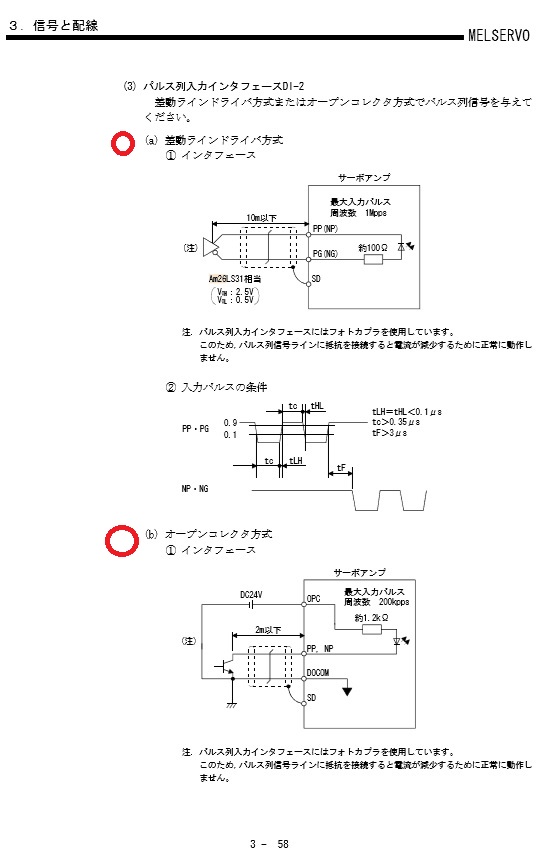
�쓮���C���h���C�o�Ȃ�@��
SEC��`�t�H�g�J�v���`Sm26LS31�`�T�[�{�A���v��PP/PG�@�ɐڑ�
�I�[�v���R���N�^�����Ȃ�
SEC��`�t�H�g�J�v���`�T�[�{�A���v��PP/PG�@�ɐڑ�
��L�ł����̂��ȁ`�H
�ŁA�����ō���̍ő�̋^��Ȃ̂ł����A
MACH�R�̃\�t�g�ŁASEC��̐M����PWM�M�����o���Ƃ������ƂɂȂ�̂ł��傤���H�H
�����������t�I�N�̃I�[�N�V�����A���[�g��ݒ肵�܂����B
 TR 2019/05/19(Sun) 05:53 No.1470
TR 2019/05/19(Sun) 05:53 No.1470 Re: ���[PWM�M��
 �s�q����C���͂悤�������܂��B
�s�q����C���͂悤�������܂��B�����C���̏������̂œ����Ȃ�C��H�͊ȒP�ŁC
�ʐ^�̂悤�ɂȂ�C�_���h�b��g�������ł�����C
�Ȍ����Ǝv���܂��B
�d�������d�b����������̂��݂��ł��ˁB
�l�k�S�̃��[�^���C�ǂ̃��[�^�[�������ł��ˁB
�n�m�E�n�e�e�����̐��䂾�ƁC�b�͊ȒP���Ǝv���܂����C
��]�����o�v�l�łƂȂ�ƁC��{���g���̕ϊ������Ȃ��ƁC
���߂ł��傤����C������ƁC���G�����ł��ˁB
mabo 2019/05/19(Sun) 08:43 No.1471 Re: ���[PWM�M��
mabo����_��IC�̌��L���������܂��B
�������������[�^�[�́A�؍�Ɏg�����[�^�[�ł��B
PWM�́A��͂�A�}�b�n3�̃\�t�g��SEC�����o�͂���̂ł��傤���H?
�������������[�^�[�́A�؍�Ɏg�����[�^�[�ł��B
PWM�́A��͂�A�}�b�n3�̃\�t�g��SEC�����o�͂���̂ł��傤���H?
TR 2019/05/19(Sun) 12:27 No.1472 Re: ���[PWM�M��
 �s�q����A���͂悤�������܂��B
�s�q����A���͂悤�������܂��B�m�F����̂Ɏ�Ԏ���Ă��܂��܂����B
�U�S�r�b�g�̂v�h�m�c�n�v�r�P�O�̃m�[�g�Ŋm�F���Ă܂������A
�v������������Ȃ������̂ŁA
�ȑO�g���Ă��A�R�Q�r�b�g�̂v�h�m�c�n�v�r�V�̃m�[�g�Ŋm�F���܂����B
��PWM�́A��͂�A�}�b�n3�̃\�t�g��SEC�����o�͂���̂ł��傤���H?
���́A�r�d�b����̊�̔ėp�o�͂P�S�Ŋm�F���Ă݂܂����B
�I�V���Ŕg�`���݂�ƁA���Ȃ�䂪��ł܂��B
����ł��A
http://mabo52.sakura.ne.jp/index.php?e=1062
�̋L���Ŏg�����o�v�l�̃R���g���[���[�ɓ���Ă݂�ƁA
���[�^�[���R���g���[�����邱�Ƃ��ł��܂����B
SmoothStepper���璼�ڔg�`�����Ă݂�ƁA
�ȑO�A�p�������|�[�g�Ŋm�F�����Ƃ��̂悤�ɁA
���ꂢ�Ȕg�`���m�F�ł��܂����B
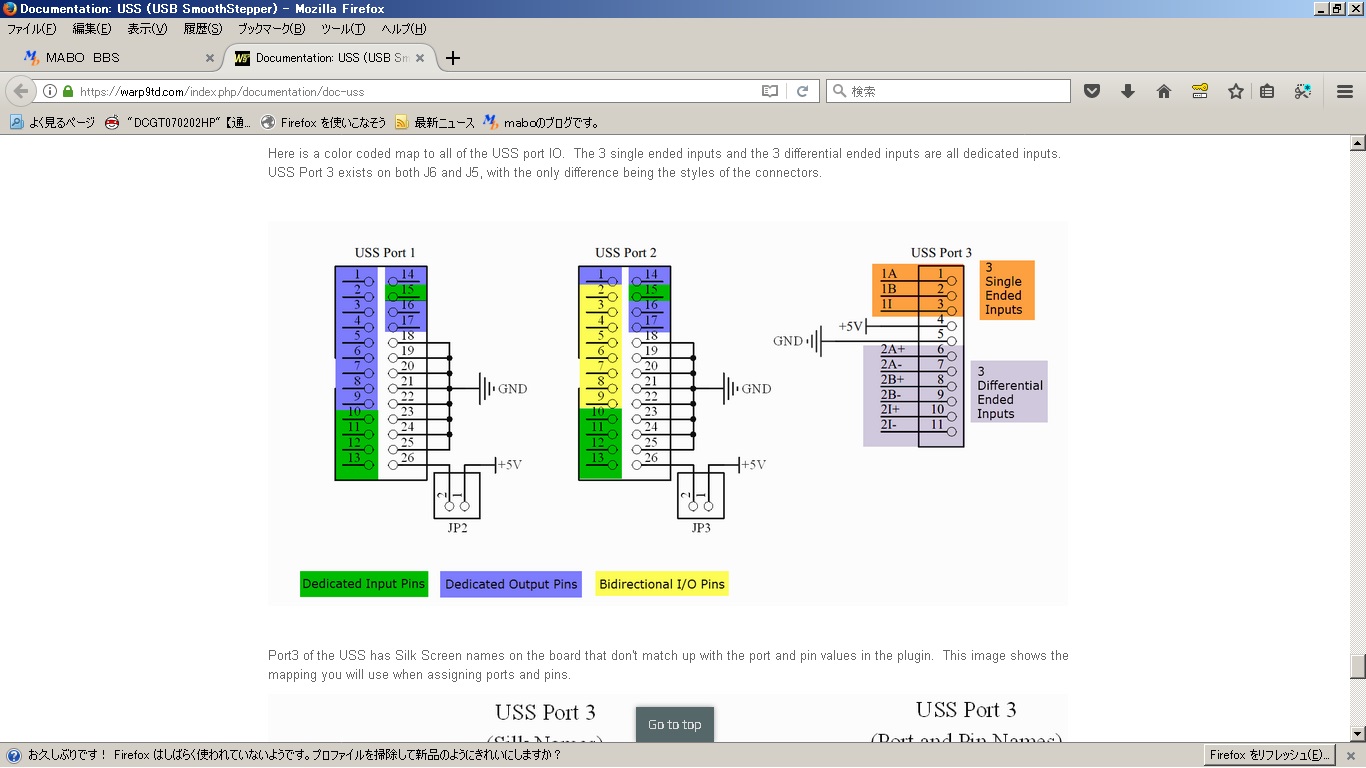
�m�F�����̂́A
�@�@�@�|�[�g�Q�@�s���@�P�@�@����
�@�@�@�|�[�g�Q�@�s���@�P�S�@����
�@�@�@�|�[�g�Q�@�s���@�P�U�@���~
�@�@�@�|�[�g�Q�@�s���@�P�V�@�����i�ȑO�̊m�F�j
�ł��BSmoothStepper�̃|�[�g�Q�̏o�͂�
�@�@�@�@�P�@�P�S�@�P�U�@�P�V
�ł����A�s���P�U�����߂������������s���ł��B
����́A�Ԃɘ_��IC����܂���ł������A
���� SmoothStepper�@�ɂ��A�\�t�g�̏I�����ŁA
�e���͂Ȃ������悤�ł��B
�����ASEC����̊��ʂ��ƁA�\�t�g�̊J�n�A�I���A
���ŁA��u�i1�b���x�j�A���[�^�[����]���邱�Ƃ�����܂������A
���ڂȂ��ł��A���v��������܂���B
���ۂ̉^�p�ł́ASmoothStepper�ɒ��ڂȂ������������Ǝv���܂��B
���������������[�^�[�́A�؍�Ɏg�����[�^�[�ł��B
���݂�ML4�̃��[�^�[���g��Ȃ��ŁA�����ł������B
����Ȃ�A���낢��A�I���̗]�n�͍L����܂��ˁB
�R�����[�^�[�̃C���o�[�^�[����ł��傤���ˁB
�ڍׂ͒��ׂ����Ƃ͂Ȃ��̂ł����A
�C���o�[�^�[���ƁAPWM�ł̐�����A�d���ω��ł̐���A��
�o���镨������悤�ł��ˁB
mabo 2019/05/20(Mon) 10:53 No.1473 Re: ���[PWM�M��
 mabo����A�I�V������J�l�ł��B
mabo����A�I�V������J�l�ł��B�����ڂȂ��ł��A���v��������܂���B
SEC��Ɍq���Ƃ������Ƃł���ˁB
��̂ɂ́A
SmoothSteper�|�[�g�Q�@�`�@SEC��̈ȉ��̒[�q�`�t�H�g�J�v���[��SSR�`�T�[�{�A���v��PP�Ƃ�PG
SEC��̒[�q
�|�[�g2�̂P�ԁE�P�S�ԁE�P�U�ԁi����̎������ʂ́H�����ꉞ�o�͒[�q�j�E�P�V��
�����ۂ̉^�p�ł́ASmoothStepper�ɒ��ڂȂ������������Ǝv���܂��B
���̘b���Ăт����肵�܂����B
�Ȃ����Ƃ����A���܂ňȉ��̒ʂ�q�����R�͕�����܂���ł������A���R���Ǝv���Ă��܂����B
PC��SS���CNC����T�[�{�p�b�N
�@�@�@�@�@��
�@�@�@�@�@��p
����SmoothSteper�ɂȂ���Ƃ������Ƃ́ASEC��͗v��Ȃ��Ƃ������ƂȂ̂ł��傤���H
���ړ�����̂́ASmoothStepper�̃|�[�g�Q�̂P�E�P�S�E�P�U�E�P�V��ł����H�H
����ƁA��������X�ł����A�p�\�R����USB�[�q����A�|�[�g�P�E�Q�E�R���̒[�q���g������āA
SmoothStepper���āA�{���ɐ����ȂƂ��v���悤�ɂȂ�܂����B�ł��A�d�|���̗����͕s���ł��i�j
�C���o�[�^�[�ł����A���̏ꍇ�A���_������Ǝv���܂��B
���[�^�[�̑傫���ł��B�@���ɁA���Ɠ����Q�D�QKw�̂R�����[�^�[���ƍ����d���Ȃ��Ă��܂��A
���ł������ɂȂ�Ǝv���܂��B
���̐�����Ă��܂����A�Q�D�Q�����͕s�v���ȂƂ��v���܂��B
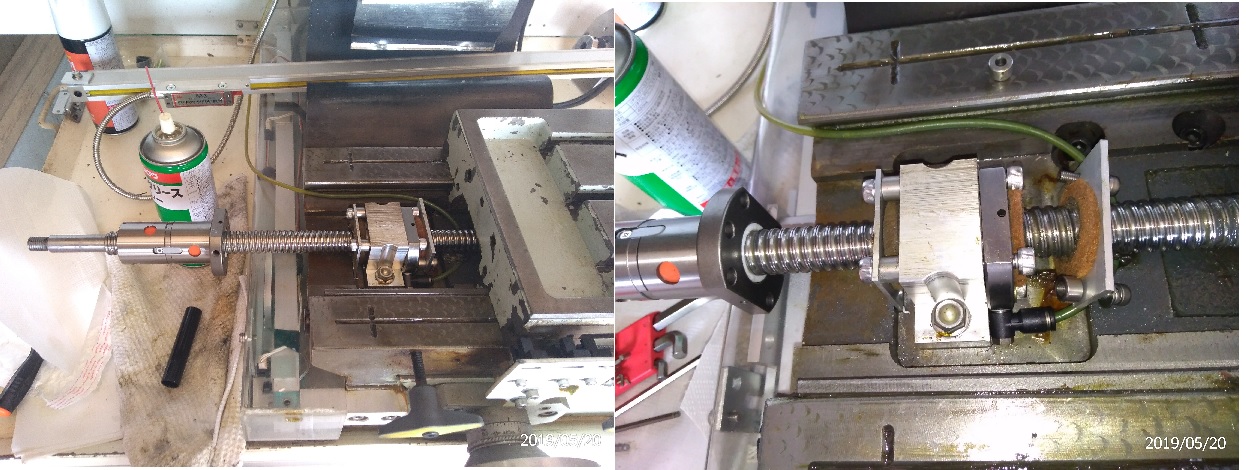
���́A
�����́A�����AML4��X���̃o�b�N���b�V����Y�����傫���̂ŁAX���̃{�[���l�W��^���̃{�[���l�W�i�b�g�Ɍ������悤�Ƃ��܂����A�A�A�B
�Ȃ�ƁA�e�[�u���̈ꕔ���T�o�[�����Ȃ��Ɨ^���{�[���l�W�i�b�g�ƌ����s�Ȃ��Ƃ�
������܂����B�@�i�b�g�������Ȃ�Ɠ������Ă��܂���ł���ˁB
������������ŁA���ɖ߂��܂����B�����т�������ł����B
�ʐ^�́A�A���̌����^���{�[���l�W�i�b�g�ł��B
�ꉞ�A�g�݂Ȃ������̂ŁA�Ђ���Ƃ�����A�o�b�N���b�V�������P����邩������܂���B
TR 2019/05/20(Mon) 14:46 No.1474 Re: ���[PWM�M��
�s�q����A�����́B
�{�[���i�b�g�̊����ł����B
���ɂ͖��m�̕���ł��ˁB
�i�b�g���O���ƁA���̃{�[�����o�Ă��܂��̂ŁA
����̂��ȂƎv���Ă܂����B
���܂��o�b�N�N���b�V�����Ȃ��Ȃ�Ƃ����ł��ˁB
��ɂ܂����ꂱ�����Ă܂����B
�����ڂȂ��ł��A���v��������܂���B
�ł����A�o�v�l�̃R���g���[���[�Ƃr�d�b����̊��A
SmoothStepper�Ƃ̊Ԃɘ_����H������Ȃ��Ă����v�����A
�Ƃ������Ƃł��B
PWM�̃R���g���[���[�ɂ����̂�������܂��A
SEC����̊�̓d�����𗎂Ƃ��Ă��A���[�^�[����葱���邱�Ƃ͂Ȃ������A�Ƃ������Ƃł��B
�����A�ʂȋ@��A�ʂȊ��ł́APC�̓d���𗎂Ƃ����肷��ƁA
���[�^�[����葱���܂����B
MACH����̐M���Œ���FET�����h���C�u����ꍇ���́A
�e�����邩������܂���ˁB
���ǂ́A���ۂ̊��ŁA���ۂɓ������Č��āA��悤����
�Ǝv���܂��B
�ʏ�́A�s�q����̊��̂悤��
PC��SS���CNC����T�[�{�p�b�N
�@�@�@�@�@��
�@�@�@�@�@��p
�݂����ɂȂ邩�Ǝv���܂����ǁA���ڂr�r�ɂȂ��ł��A
���v�����ł��B
���́A�r�r�ւ̓��͂Ɋւ��ẮA����̒��p�{�[�h����āA
�O�̂��߂Ƀv���A�b�v���Ă���܂����A
�o�́i�P�C�P�S�C�P�U�C�P�V�j�Ɋւ��ẮA���ڂȂ��ł܂��B
���ɁA�o�v�l�M���̂悤�Ȃ��g���ꍇ�A�r�d�b����̊�����o�R����ƁA
�M�����o�߂���Ƃ���̂h�b�̉e���ŁA���ꂢ�Ȕg�`�łȂ��Ȃ铙�̉e��������悤�ł��B
�o�v�l���̐M���������ꍇ�́A�]�v�ȕ���ʂ��Ȃ������A
���܂������̂��ȂƎv���܂����B
�r�d�b����̔ėp�o�͂P�S�ԓ����g���ꍇ�ł��A�r�d�b����̊����Ƃ�̂ł͂Ȃ��A
�p�������M��������肷��`�łƂ�����A�����ƁA���ꂢ�ȐM�������o����Ǝv���܂��B
�{���ɁA
��SmoothStepper���āA�{���ɐ����ȂƂ��v���悤�ɂȂ�܂����B
���̒ʂ肾�Ǝv���܂��B
����́A���łɂ��낢�뒲�ׂĂ݂܂������A
���̊��ł́A�l�`�b�g�ɓ��͂��鐔�l�ƃ��[�^�[�̉�]���́A
������ƁA����������܂����B
����A�����ƁA�o�v�l�̊�{���g���ƃJ�[�l���̎��g����
�W���ȂƎv���Ă܂��B
��{���g���̕ϊ����������̂��g���Ƃǂ��Ȃ�̂��A
���̂����m���߂Ă݂悤�Ǝv���Ă܂��B
�{�[���i�b�g�̊����ł����B
���ɂ͖��m�̕���ł��ˁB
�i�b�g���O���ƁA���̃{�[�����o�Ă��܂��̂ŁA
����̂��ȂƎv���Ă܂����B
���܂��o�b�N�N���b�V�����Ȃ��Ȃ�Ƃ����ł��ˁB
��ɂ܂����ꂱ�����Ă܂����B
�����ڂȂ��ł��A���v��������܂���B
�ł����A�o�v�l�̃R���g���[���[�Ƃr�d�b����̊��A
SmoothStepper�Ƃ̊Ԃɘ_����H������Ȃ��Ă����v�����A
�Ƃ������Ƃł��B
PWM�̃R���g���[���[�ɂ����̂�������܂��A
SEC����̊�̓d�����𗎂Ƃ��Ă��A���[�^�[����葱���邱�Ƃ͂Ȃ������A�Ƃ������Ƃł��B
�����A�ʂȋ@��A�ʂȊ��ł́APC�̓d���𗎂Ƃ����肷��ƁA
���[�^�[����葱���܂����B
MACH����̐M���Œ���FET�����h���C�u����ꍇ���́A
�e�����邩������܂���ˁB
���ǂ́A���ۂ̊��ŁA���ۂɓ������Č��āA��悤����
�Ǝv���܂��B
�ʏ�́A�s�q����̊��̂悤��
PC��SS���CNC����T�[�{�p�b�N
�@�@�@�@�@��
�@�@�@�@�@��p
�݂����ɂȂ邩�Ǝv���܂����ǁA���ڂr�r�ɂȂ��ł��A
���v�����ł��B
���́A�r�r�ւ̓��͂Ɋւ��ẮA����̒��p�{�[�h����āA
�O�̂��߂Ƀv���A�b�v���Ă���܂����A
�o�́i�P�C�P�S�C�P�U�C�P�V�j�Ɋւ��ẮA���ڂȂ��ł܂��B
���ɁA�o�v�l�M���̂悤�Ȃ��g���ꍇ�A�r�d�b����̊�����o�R����ƁA
�M�����o�߂���Ƃ���̂h�b�̉e���ŁA���ꂢ�Ȕg�`�łȂ��Ȃ铙�̉e��������悤�ł��B
�o�v�l���̐M���������ꍇ�́A�]�v�ȕ���ʂ��Ȃ������A
���܂������̂��ȂƎv���܂����B
�r�d�b����̔ėp�o�͂P�S�ԓ����g���ꍇ�ł��A�r�d�b����̊����Ƃ�̂ł͂Ȃ��A
�p�������M��������肷��`�łƂ�����A�����ƁA���ꂢ�ȐM�������o����Ǝv���܂��B
�{���ɁA
��SmoothStepper���āA�{���ɐ����ȂƂ��v���悤�ɂȂ�܂����B
���̒ʂ肾�Ǝv���܂��B
����́A���łɂ��낢�뒲�ׂĂ݂܂������A
���̊��ł́A�l�`�b�g�ɓ��͂��鐔�l�ƃ��[�^�[�̉�]���́A
������ƁA����������܂����B
����A�����ƁA�o�v�l�̊�{���g���ƃJ�[�l���̎��g����
�W���ȂƎv���Ă܂��B
��{���g���̕ϊ����������̂��g���Ƃǂ��Ȃ�̂��A
���̂����m���߂Ă݂悤�Ǝv���Ă܂��B
mabo 2019/05/20(Mon) 22:56 No.1475 Re: ���[PWM�M��
 mabo����A��������J�l�ł��B
mabo����A��������J�l�ł��B���o�v�l�̃R���g���[���[�Ƃr�d�b����̊��A
SmoothStepper�Ƃ̊Ԃɘ_����H������Ȃ��Ă����v�����A
�Ƃ������Ƃł��B
����͏����t���ł���ˁH
SEC����v���_�E���ɂ��Ȃ��ꍇ�́A���i�_��IC�j�������ƕK�v�ł��傤�Ƃ������ł��ˁH
�q����
PC�`SmoothStepper�`SEC��`���`FET��t�H�g�J�v���`�ASSR
���݂����ɂȂ邩�Ǝv���܂����ǁA���ڂr�r�ɂȂ��ł��A
���v�����ł�
����͕֗��I
PC�`SmoothStepper�`FET��t�H�g�J�v���`�ASSR
���̂Ȃ����ł���ˁH
���r�d�b����̔ėp�o�͂P�S�ԓ����g���ꍇ�ł��A�r�d�b����̊����Ƃ�̂ł͂Ȃ��A
�p�������M��������肷��`�łƂ�����A�����ƁA���ꂢ�ȐM�������o����Ǝv���܂��B
Simple�@IS�@Best�I
�����ƂȂ�ƁA14�Ԃ����ɂ���̂ŁA�P�S�ԂɃ��[�h�����͂t��������@���ȒP�ł��傤���H
����ƁAPWM�R���g���[���[����A�M�����m�F���Ă���悤�Ɏv���܂����APWM�������ɁA
MACH3��G�R�[�h�ł��APWM�M�����ςł��܂���ˁH
�@��̂ɂ́AG�R�[�h��S�L���i��@S1000�j��PWM��ς���B
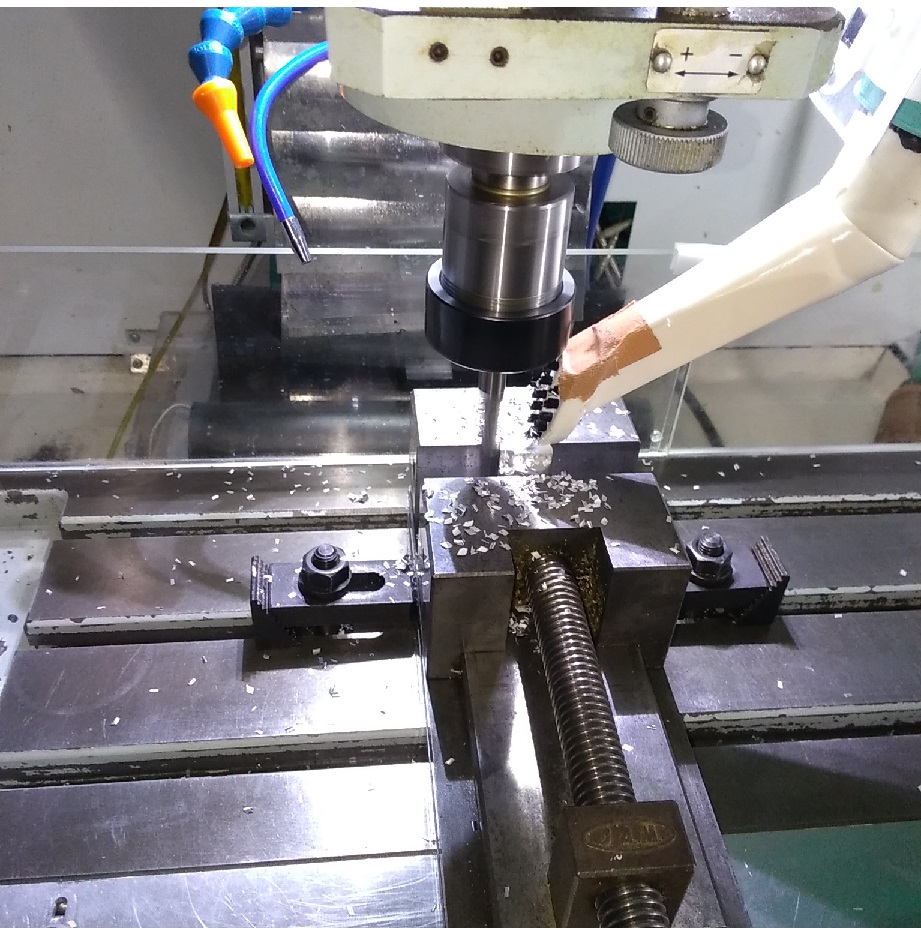
�{�[���˂���g�݂Ȃ�������AXY�����Ƀo�b�N���b�V����0.01�ƂȂ�܂����B
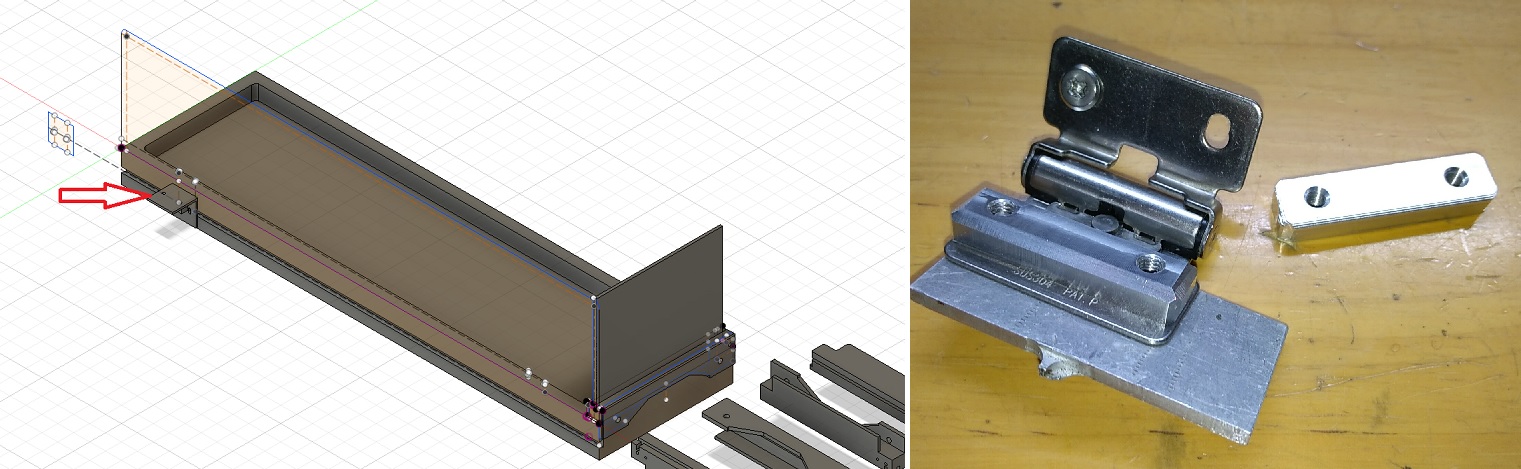
�����́A�{�[���l�W�̎��}�E���g�{���g�̂��݁I�I
����ƁA�{�[���l�W�̐S�o���Ǝv���܂��B
�{�[���l�W����яo���Ă��A�ȒP�Ɏ���܂��B�@����@���@���ɂ�����܂���B
https://www.youtube.com/watch?v=d0HDM8TYLjM
������R���Ƃ��đg�t���Ȃ����܂����i��
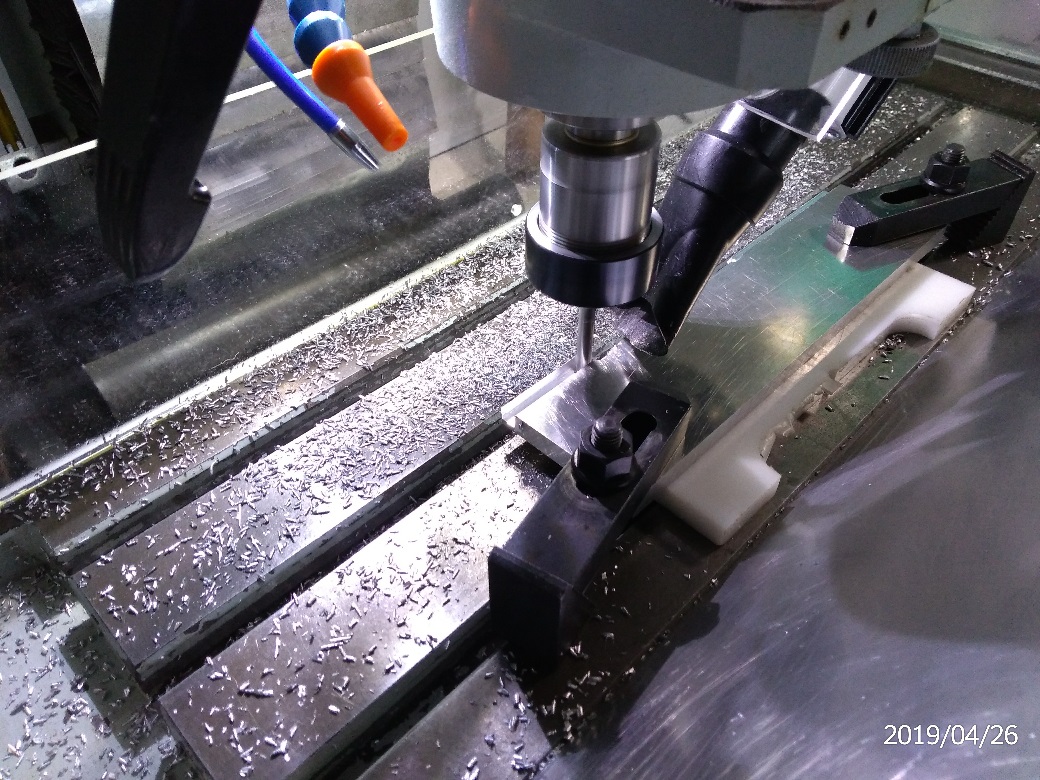
�ʐ^�́A������ƒ��̂������肵����ʂł��B
�NjL
SEC�������ƁA�o�͐M���́A�_��IC�ɂȂ����Ă��邾��
�������A���́A�_��IC�̂ق���AM26LS31CN���Ȃ����Ă���B�������肻���B
TR 2019/05/21(Tue) 07:27 No.1476 Re: ���[PWM�M��
�s�q����C���͂悤�������܂��B
�o�b�N�N���b�V���C���P�悩�����ł��ˁB
����ƁC�{�[���l�W�̃{�[���̋l�ߍ��݁H�̏�肪�Ƃ��������܂��B
��]���m�F�����̂́C�l�`�b�g����̐M�����C�o�v�l�̃R���g���[���[�ɓ���܂����B
�o�v�l�̃R���g���[���Ƃ������C�@�\�I�ɂ́C���[�^�[�̃h���C�o�[�ł��ˁB
�O������̂o�v�l�M���ŁC�d���i�d���H�j�ς��āC���[�^�[�ɑ�����̂ł��B
�e�d�s�̖������͂������̂��ȁB
�f�R�[�h�����̖ʓ|�������̂ŁC�W���O���[�h�ł���܂����B
http://mabo52.sakura.ne.jp/index.php?e=802
�ɏ������菇�ł��B
����ƁC�M���̉����ł����C���̋L���ɂ���悤�Ȃ��̎g���ƁC
��Ֆ{�̂ɂ͎�����Âɂł��܂��B
����C�H���ł��B
http://akizukidenshi.com/catalog/g/gC-00042/
���͂�����g���܂������C���ꂾ�����ƁC���X���X�Ȃ̂ŁC
http://akizukidenshi.com/catalog/g/gC-00046/
�����邩�Ǝv���܂��B
�o�v�l�̃R���g���[���ɂ��ẮC
��������ƁC��������Ă݂����ł��B
�ȑO�ɂ�����o�v�l�̊�{���g����ύX����o�h�b���쐬���悤�Ǝv���܂��B
�V�������ɈڐA����̂ɁC�܂��C���Ԃ����邩�Ȃ��B
���̂��߂ɁC�����ł�����Ă��悩�����̂ł����C
�o�v�l�����@�|�`��܂����B
https://www.amazon.co.jp/gp/product/B077Z3TD8B/ref=ppx_yo_dt_b_asin_image_o01_s00?ie=UTF8&psc=1
�o�b�N�N���b�V���C���P�悩�����ł��ˁB
����ƁC�{�[���l�W�̃{�[���̋l�ߍ��݁H�̏�肪�Ƃ��������܂��B
��]���m�F�����̂́C�l�`�b�g����̐M�����C�o�v�l�̃R���g���[���[�ɓ���܂����B
�o�v�l�̃R���g���[���Ƃ������C�@�\�I�ɂ́C���[�^�[�̃h���C�o�[�ł��ˁB
�O������̂o�v�l�M���ŁC�d���i�d���H�j�ς��āC���[�^�[�ɑ�����̂ł��B
�e�d�s�̖������͂������̂��ȁB
�f�R�[�h�����̖ʓ|�������̂ŁC�W���O���[�h�ł���܂����B
http://mabo52.sakura.ne.jp/index.php?e=802
�ɏ������菇�ł��B
����ƁC�M���̉����ł����C���̋L���ɂ���悤�Ȃ��̎g���ƁC
��Ֆ{�̂ɂ͎�����Âɂł��܂��B
����C�H���ł��B
http://akizukidenshi.com/catalog/g/gC-00042/
���͂�����g���܂������C���ꂾ�����ƁC���X���X�Ȃ̂ŁC
http://akizukidenshi.com/catalog/g/gC-00046/
�����邩�Ǝv���܂��B
�o�v�l�̃R���g���[���ɂ��ẮC
��������ƁC��������Ă݂����ł��B
�ȑO�ɂ�����o�v�l�̊�{���g����ύX����o�h�b���쐬���悤�Ǝv���܂��B
�V�������ɈڐA����̂ɁC�܂��C���Ԃ����邩�Ȃ��B
���̂��߂ɁC�����ł�����Ă��悩�����̂ł����C
�o�v�l�����@�|�`��܂����B
https://www.amazon.co.jp/gp/product/B077Z3TD8B/ref=ppx_yo_dt_b_asin_image_o01_s00?ie=UTF8&psc=1
mabo 2019/05/21(Tue) 10:48 No.1477 Re: ���[PWM�M��
>�O������̂o�v�l�M���ŁC�d���i�d���H�j�ς��āC���[�^�[�ɑ�����̂ł��B
�ς����d���́A�@��ɂ���ނ͗L��܂����H
0v~24v�Ƃ��A�Ȃ��ł����H
�ς����d���́A�@��ɂ���ނ͗L��܂����H
0v~24v�Ƃ��A�Ȃ��ł����H
TR 2019/05/21(Tue) 12:00 No.1478 Re: ���[PWM�M��
�s�q����C����ɂ��́B
���̎g�����̂́C�Q�S�u�d�l�̂c�b���[�^�[�ŁC
���̂o�v�l�R���g���[���[���Q�S�u����Ă܂��B
https://www.amazon.co.jp/12V-24V-110V-DC%E3%83%A2%E3%83%BC%E3%82%BF%E9%80%9F%E5%BA%A6%E3%82%B3%E3%83%B3%E3%83%88%E3%83%AD%E3%83%BC%E3%83%A9%E3%83%9C%E3%83%BC%E3%83%89PWM-MACH3%E3%82%B9%E3%83%94%E3%83%B3%E3%83%89%E3%83%AB/dp/B01MS47O1H/ref=sr_1_12?__mk_ja_JP=%E3%82%AB%E3%82%BF%E3%82%AB%E3%83%8A&keywords=PWM+MACH3&qid=1558412025&s=gateway&sr=8-12
�Ɠ������Ǝv���܂��B
�A���Ŕ��������ȁB
���F�̃W�����p�[�̐�ւ��ŁC
�l�`�b�g����̓��͂ł̃R���g���[���i�O���o�v�l�M���j��
�t���̃{�����[���ł̑��x���߂̗������ł��܂��B
���̎g�����̂́C�Q�S�u�d�l�̂c�b���[�^�[�ŁC
���̂o�v�l�R���g���[���[���Q�S�u����Ă܂��B
https://www.amazon.co.jp/12V-24V-110V-DC%E3%83%A2%E3%83%BC%E3%82%BF%E9%80%9F%E5%BA%A6%E3%82%B3%E3%83%B3%E3%83%88%E3%83%AD%E3%83%BC%E3%83%A9%E3%83%9C%E3%83%BC%E3%83%89PWM-MACH3%E3%82%B9%E3%83%94%E3%83%B3%E3%83%89%E3%83%AB/dp/B01MS47O1H/ref=sr_1_12?__mk_ja_JP=%E3%82%AB%E3%82%BF%E3%82%AB%E3%83%8A&keywords=PWM+MACH3&qid=1558412025&s=gateway&sr=8-12
�Ɠ������Ǝv���܂��B
�A���Ŕ��������ȁB
���F�̃W�����p�[�̐�ւ��ŁC
�l�`�b�g����̓��͂ł̃R���g���[���i�O���o�v�l�M���j��
�t���̃{�����[���ł̑��x���߂̗������ł��܂��B
mabo 2019/05/21(Tue) 13:16 No.1479 Re: ���[PWM�M��
>���F�̃W�����p�[�̐�ւ��ŁC
�l�`�b�g����̓��͂ł̃R���g���[���i�O���o�v�l�M���j��
�t���̃{�����[���ł̑��x���߂̗������ł��܂��B
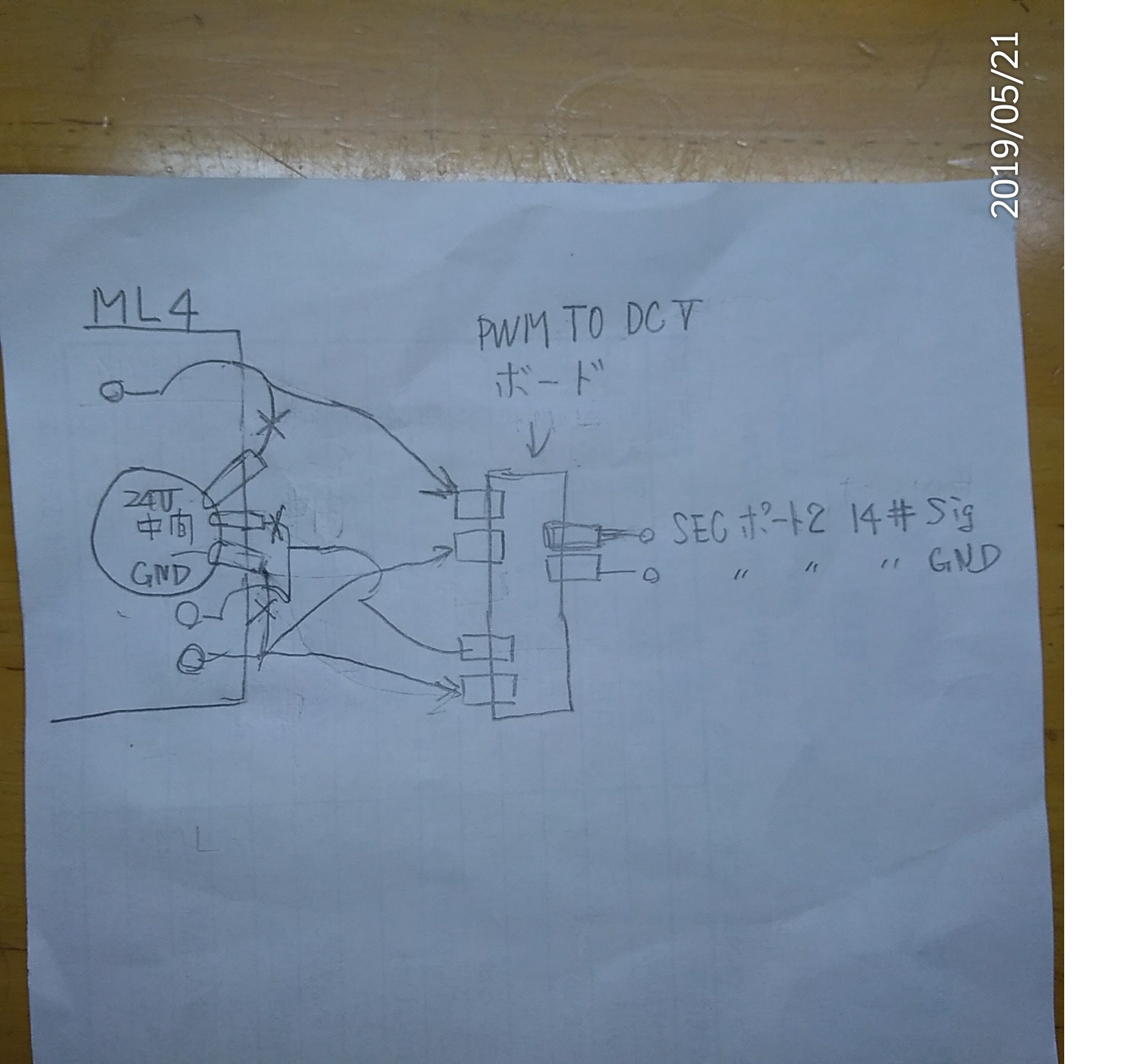
mabo����r���S�����I
ML4��sw�tVR�ŃX�s���h�����[�^�[�̉�]���𐧌䂵�Ă��܂��B
�Ȃ̂ŁAmL��sw�tVR�̕���������[�q�ɏЉ������PWM to DC�ϊ�����q����OK�����I
�l�`�b�g����̓��͂ł̃R���g���[���i�O���o�v�l�M���j��
�t���̃{�����[���ł̑��x���߂̗������ł��܂��B
mabo����r���S�����I
ML4��sw�tVR�ŃX�s���h�����[�^�[�̉�]���𐧌䂵�Ă��܂��B
�Ȃ̂ŁAmL��sw�tVR�̕���������[�q�ɏЉ������PWM to DC�ϊ�����q����OK�����I
TR 2019/05/21(Tue) 13:47 No.1480 Re: ���[PWM�M��
 �C���[�W�������������B
�C���[�W�����Ă��������B���݂̖������ӌ������������B
�ʐ^�������ւ��܂����B���x���B
TR 2019/05/21(Tue) 15:28 No.1481 Re: ���[PWM�M��
 mabo���͂悤�������܂��B
mabo���͂悤�������܂��B����AML4��VR�̓d���ׂ܂����B
���̑O�ɂ�����ƁA
����SW�t��VR���L�ڂ��܂������ASW�͂Ȃ�VR�ł����B
���݂܂���ł����B
�ŁA�d���ł����ADC5V�̓d�����������Ă��܂����B
�����Ȃ�ƁA���̕i�ł����ˁH�H
�ȑO���Љ�����������̂ł��B
���̃{�[�h�́A�{�[�h�̓d����DC24V���K�v�Ȃ̂ł��傤���H
https://www.amazon.co.jp/Mach3-Board-Spindle���x����-Control-CM-112/dp/B00LMY3BIQ/ref=sr_1_cc_1?s=aps&ie=UTF8&qid=1423792029&sr=1-1-catcorr&keywords=PWM%E3%80%80MACH
TR 2019/05/22(Wed) 07:27 No.1482 Re: ���[PWM�M��
�s�q����C���͂悤�����܂��B
�l�k�S�̃��[�^�[�ڃh���C�u����̂ł͂Ȃ��C
�u�|�e���V�����[�^�i�{�����[���j�̑�ւ��v
�Ƃ������Ƃ�������ł��ˁB
��H�̂��ƂɂȂ�ƁC�悭�킩��Ȃ��̂ł����C
���̎g�����o�v�l�R���g���[���[�́C����Ǝv���܂��B
���肷��ƁC������ȋC�����܂��B
�g����Ƃ�����C�f�W�^���|�e���V�����[�^������ł��傤���B
�l�b�g�ł�����܂������ǁC
https://denshikousakusenka.jimdo.com/%E9%9B%BB%E5%AD%90%E9%83%A8%E5%93%81/%E3%83%87%E3%82%B8%E3%82%BF%E3%83%AB%E3%83%9D%E3%83%86%E3%83%B3%E3%82%B7%E3%83%A7%E3%83%A1%E3%83%BC%E3%82%BF-x9cxxx/
�ʂ����q�b�g���܂���ł����B
�l�k�S�̃��[�^�[�ڃh���C�u����̂ł͂Ȃ��C
�u�|�e���V�����[�^�i�{�����[���j�̑�ւ��v
�Ƃ������Ƃ�������ł��ˁB
��H�̂��ƂɂȂ�ƁC�悭�킩��Ȃ��̂ł����C
���̎g�����o�v�l�R���g���[���[�́C����Ǝv���܂��B
���肷��ƁC������ȋC�����܂��B
�g����Ƃ�����C�f�W�^���|�e���V�����[�^������ł��傤���B
�l�b�g�ł�����܂������ǁC
https://denshikousakusenka.jimdo.com/%E9%9B%BB%E5%AD%90%E9%83%A8%E5%93%81/%E3%83%87%E3%82%B8%E3%82%BF%E3%83%AB%E3%83%9D%E3%83%86%E3%83%B3%E3%82%B7%E3%83%A7%E3%83%A1%E3%83%BC%E3%82%BF-x9cxxx/
�ʂ����q�b�g���܂���ł����B
mabo 2019/05/22(Wed) 08:00 No.1483 Re: ���[PWM�M��
mabo����ɂ��́B
�����Ȃ̂ł��B
ml4�̉�]������́AVR�œd�����䂵�Ă��܂��B
�Ȃ̂ŁASEC������PWM��d���ϊ��ł���{�[�h�͎g����Ǝv���܂����B
�ł��A�q������A����댯���L��ł����B
�Љ������������܂������A��R��ς���ɂ́A
U/D, INC, CS�̂R�s�����g����
�ƗL��܂����ASEC��̃s����14�Ԃ�1���g���܂��B
�ǂ�����āA�Љ��������ƂȂ��̂ł����H
������܂���I
�����Ȃ̂ł��B
ml4�̉�]������́AVR�œd�����䂵�Ă��܂��B
�Ȃ̂ŁASEC������PWM��d���ϊ��ł���{�[�h�͎g����Ǝv���܂����B
�ł��A�q������A����댯���L��ł����B
�Љ������������܂������A��R��ς���ɂ́A
U/D, INC, CS�̂R�s�����g����
�ƗL��܂����ASEC��̃s����14�Ԃ�1���g���܂��B
�ǂ�����āA�Љ��������ƂȂ��̂ł����H
������܂���I
TR 2019/05/22(Wed) 11:06 No.1484 �V�N�����߂łƂ�
 ���悢��A�V�V�c���ʂɔ����A�N������������A�ߘa�ɂȂ�܂��܂����B
���悢��A�V�V�c���ʂɔ����A�N������������A�ߘa�ɂȂ�܂��܂����B�V�N���}�����悤�ȁA���₻��ȏ�ɓ��{�S�̂��j���Ă��܂��B
�������A�ߘa�́A���a�ōK���Ȏ���ɂȂ��ė~�����Ƃ������܂��B
�ے��̐V�V�c�Ƌ��ɂ���w���{�����n���ē��{�����S�̂����J�������鎞��ɂȂ��ė~�����Ǝv���܂��B
mabo����A���ꂩ����X�������肢���܂��B
�ʐ^�́A�T���H���ɂȂ����̂ŁA���悢��o�C�N�V�[�Y���J���Ƃ������ƂŁA
�v�X�ɐ�Ԃ��ς܂������Ԃł��B
�j���W���P�O�O�O�Ƃ����܂��B
��U�P�ɂȂ��������ł����A�@�����@����
�܂��܂����ꂻ���ł��B
���N������܂���`�B
TR 2019/05/01(Wed) 06:13 No.1452
���K
�����́A�{���͋x�݂ł����̂ŁA
�ꉞ���������A�W�o���u�Ɨ�p���u�̉��K�����܂����B
���K�̕��@�́A�W�������~���̔��G���h�~���œ˂����Đؒf����Ƃ������̂ł��B
�ؒf�̕��@�́A2�����āA
�؍�����g��Ȃ��h���C�؍�Ɛ؍�����g���ؒf������Ƃ������܂��B
����́A�؍�����g���ؒf�ł��B
����Ă݂ĕ�����܂����B
�h�o���Ɛ؍���������Ă���CNC�t���C�X�̓�������܂������A
���̗��R�́A�؎q�����܂Ȃ��悤�ɐ؍���ŗ����ׂɃh�o���Ɨ����Ă����킯�ł��B
�؍���́A�ۂ��ۂ����x�ő���܂����A�؎q�𗬂��ɂ́A����Ȃ�ɐ؍���𗬂��K�v������܂��B
�������Ȃ��ƁA�؎q�����܂�܂��B
�p�����C���́A�ŏ�����e�[�u���Ɍ����������̂ŁA
���̌�����p���𗬂��܂����B�@�����āA
�e�[�u�����痎����p���́A�����̏ꍇ�A�t���C�X�Ղ̑�����̂��傫�ȎM�ɂȂ��Ă���̂ŁA�e�[�u�����痎�����p���́A�傫�ȎM�̔p���E���痬��o��d�|���ł��B
�⑫����ƁA�t���C�X�Ղ�傫�ȃo�[�x�L���[�S�̏�ɏ悹�Ă���̂ł��B
�ł��A����́A�e�[�u���̉��ɃI�C���p����u���Ă��̃I�C���p���Ŏ܂����B
�؍���̃|���v�͉����ł����B
�؎q�𗬂��ʂ͉\�Ȋ����ł��B
��Ƃ��I���Ďv���܂������A��ƌ�̐��|���ʓ|�ł��B
�ł��܁`�A�W�o���u���劈��ł����B
��͂�A�W�o���u�Ɨ�p���u�͕K�v���ȁ`�Ƃ������܂����B
TR 2019/04/26(Fri) 12:52 No.1450
Re: ���K
 �����Ď��炵�܂��B
�����Ď��炵�܂��B���K��2�Ƃ������ƂŁA
�u���A�[�����Ȃ���؍�����܂����B
��Ԃ��������̐؍�ʂ��o�܂����B
�r�r�肪���Ȃ��؍�ʂ���r�I���ʂ����Ȃ������B
�����A�G�A�[�R���v���b�T�[�����邳���B
PIC�ɂ��Ԍ����Ԃ̐���ƃG�A�[�R���v���b�T�[��
���͂�0.3���ł��ƃG�A�[�̋��������傤�ǂ��������ŁA
�؎q���G�A�[�ɂ���юU�肪���Ȃ������B
PIC�ɂ��Ԍ����Ԑ���������ł�(^^��
�������A�t���C�X�Ղ��Ă���A�����܂ŗ���̂�5�N���قNJ|����܂�����i��
TR 2019/04/26(Fri) 16:44 No.1451 ���ʌv�Z������
 mabo����A�����́B
mabo����A�����́B�؎q�K�[�h�̎��̌��Ď����ł���W�o���u�ɒ��肵�܂����B
���ʌv�Z�Ƃ��Ȃ��Ŏn�܂��Ă��܂��B
�}���̊O�s���܂Ƃ܂����̂ŁA
����̊̂ł���ꋓ�����Ƃ�������悤�Ȏv���t�����������܂����B
�����ꋓ�������Ƃ�����
�W�o�@��1�ł����A�m�Y�����Q�~�����B
��́A�؍풆�ɋz����邽�߁A
������́A
�؎q�K�[�h���̏W�o�p
�Q��H�̃z�[�X��݂���Ƃ�����̂��낤����
�����́A
�L�k�z�[�X��p���邱�Ƃɂ����B
�؍풆�̃m�Y�����A�O���āA�؎q�K�[�h���𐴑|�ł���悤�ɁA�L�k�z�[�X����ݍ��߂�悤�ɁA
����ǂɂ��܂����B
TR 2019/04/03(Wed) 19:57 No.1446
Re: ���ʌv�Z������
 mabo�����́A
mabo�����́A�������A���A���������ƃK���[�W�ɒ��s�B
�A�t�^�[�T�̎��Ԃ͍D���Ȃ��Ƃ�����Ă��܂��B
����́A�W�o���u�����������̂ŁA
�܂�A�z�ǂ����ǂƊǂƂ̌q�ڂɐڒ��܂�V�[�����O���܂����B
�܁`�A�w����T�N�̏W�o�@�{�̂������Ԃ����т�Ă���悤�ł����i��
���ʁA�����ł��܂����B
�����̏ꍇ�A�R�d�Ő؎q������Ă��܂��B
�܂�A
�t���C�X�Ֆ{�̂̈͂�
�؎q�K�[�h
�����č���̏W�o���u
�~�������A�����Q�p�ʐ؎q�K�[�h�̕ǂ̍������グ��Ηǂ��������Ǝv���܂��B
�c���ۑ�́A�r�����C���ł��B
���ꂪ����B
�ʐ^�́A�W�o�@�ŋz�����l�q�ł��B
���̌`�Ԃ̂��߁A�W�o�@�őS�Ă̐؎q�͋z�����߂܂���B
�����A�ꋓ�����ł��āA
�L�k�z�[�X���d���̂ŁA
�z�[�X��L���āA����̂��݂��z������悤�ɂ��܂����B
TR 2019/04/04(Thu) 20:19 No.1447 Re: ���ʌv�Z������
�s�q����C���ӁB
���낢��C�[�����Ă��܂����ˁB
�؍H�ł́C���ꂱ��C�W�o�āC���낢����܂������C
���H�ł́C�W�o�́C������ł��B
�ǂ��邷�̂������̂ł��傤���ˁB
�����̐�q�C�z�����̂́C���\�C�͂��悤�Ȃ�ł��傤�ˁB
�ւ�����ƁC�z�[�X���ŁC�l�܂����肷��̂��Ȃ��B
����ɁC�؍�����������ł���ƁC���G�ł��ˁB
�������p�̏W�o�@�ł��g���K�v�������ł��傤���ˁB
https://www.kyocera-industrialtools.co.jp/powertools/products/item_detail.php?pid=1138
�c�h�x�O���C������Ƃ����܂������Ȃ��B
���́C���̂Ƃ���C�e�ʂ̎R�̌�n���B
���̂�����d�ɂ��邽�߂́C�ʐ�������Ă��܂��B
�������ʼn^���s���́C�����ł����C�����������B
���낢��C�[�����Ă��܂����ˁB
�؍H�ł́C���ꂱ��C�W�o�āC���낢����܂������C
���H�ł́C�W�o�́C������ł��B
�ǂ��邷�̂������̂ł��傤���ˁB
�����̐�q�C�z�����̂́C���\�C�͂��悤�Ȃ�ł��傤�ˁB
�ւ�����ƁC�z�[�X���ŁC�l�܂����肷��̂��Ȃ��B
����ɁC�؍�����������ł���ƁC���G�ł��ˁB
�������p�̏W�o�@�ł��g���K�v�������ł��傤���ˁB
https://www.kyocera-industrialtools.co.jp/powertools/products/item_detail.php?pid=1138
�c�h�x�O���C������Ƃ����܂������Ȃ��B
���́C���̂Ƃ���C�e�ʂ̎R�̌�n���B
���̂�����d�ɂ��邽�߂́C�ʐ�������Ă��܂��B
�������ʼn^���s���́C�����ł����C�����������B
mabo 2019/04/04(Thu) 21:32 No.1448 Re: ���ʌv�Z������
 mabo����A���͂悤�������܂��B
mabo����A���͂悤�������܂��B���؍�����������ł���ƁC���G�ł��ˁB
���̒ʂ�ł��B
���܂ł̌o���ł��ƁA�Ǔ��́A�ׂƂׂƂɂȂ��Ă��܂��̂ŁA�������܂����B
�������t�B���^�[���ꏏ�Ɍ������܂�����B
�������A���W�o�@�������т�Ă����̂ŁA����ۂ����ƍs���܂����B
Ryobi��VC1150�ł��B
�����ւ��̖ڈ��́A�z�����ݎd�����ł��B
�z���d������0.01666�~���ʁi�������[�g��/min�j�~�^��x�iPa�j
���ʂR�D�O���@���[�g��/min
�^��x�@�Q�T��pa
�v�Z�Ă͂߂�ƁAVC1150���A�����ň�ԁu�z�����ݎd�����v���ǂ������Ǝv���܂����B
���������ʼn^���s���́C�����ł����C�����������B
���k�J�ǂ̂悤�Ȋ����ł�������Ȃ��ł����B
�������A�ސE��́A���܂����������Ȃ��悤�ɂ��Ă��܂��B
VC1150���|�C���g���g���Ĕ����܂����B
�������A�|�C���g�́A�Ȃ�ׂ����悤�ɍw�����Ă��܂���B
�V�W�o�@�����āA�����āA����������������A������HP�ɃA�b�v���܂��B
���̂Ƃ���A�P�̏W�o�@�ŁA�J�b�^�[�̋z�����݂ƁA�e�[�u������̋z�����݂��ł���̂ŁA��ϕ֗��ł��B
�ʐ^�̋z�������������A���R�Ɋp�x���ς�����̂ŁA�֗��ł��B
�W�o�@�ł����A�A�}�]���Œ��ؐ��T�C�N�������āA�莝���̑|���@�ƍ��̂ŏW�o������Ă���l������悤�ł��ˁB
���́A�����A�o�C�N�̃����e�ɃT���h�u���X�^�[���g���Ă��܂��āA���̏W�o��ɃT�C�N�������g���Ă��܂��B
�m���ɁA�T�C�N�����ɂ���āA�`���ʂł��܂��B
���������āA�|���@����o��p���ɂ���āA���g�̔x�Ƀ`�����z�����ނȂ�ĂȂ������ł���B
TR 2019/04/05(Fri) 06:59 No.1449 �悤�₭�؎q�K�[�h
 mabo����A�\�̋L���ł����A
mabo����A�\�̋L���ł����A�����ł���B
�������A�t���C�X�Ղɖ𗧂��Ă����悤�Ȃ��̂ł�����A
��������ł��B
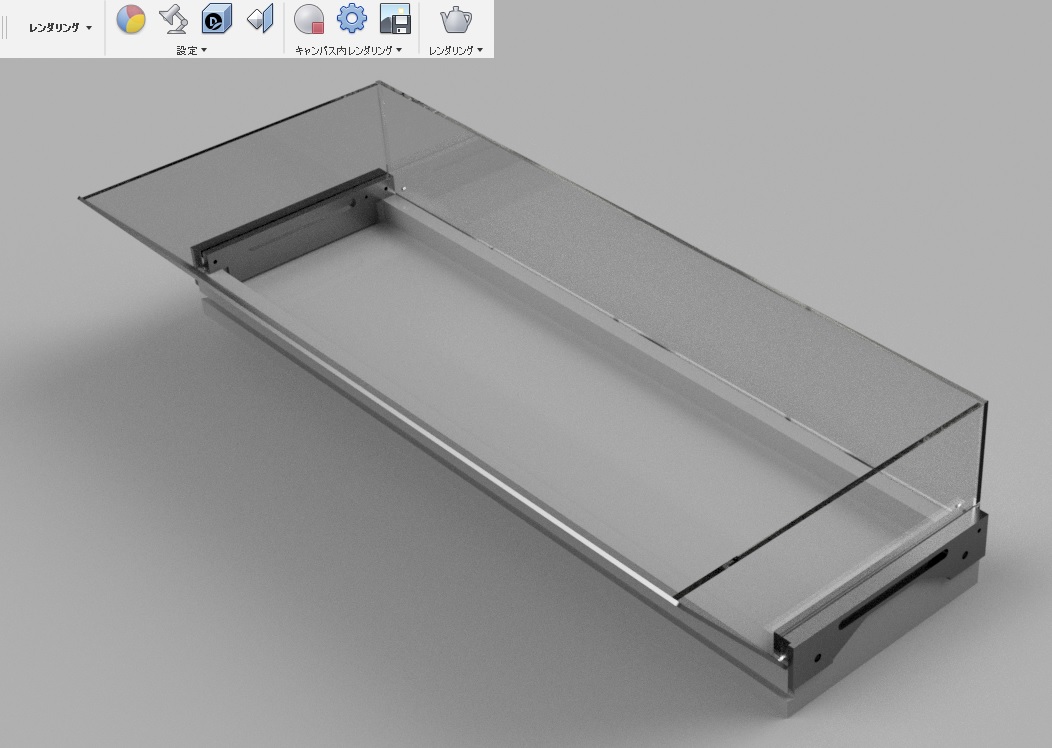
�ʐ^�ł����A
�悤�₭�A�L���R�K�[�h�삵�n�߂܂����B
���x���o�C�X�ŁA�����Ȃ����������A
���݂�0.2�������Ȃ��Ȃ��Ă��܂��܂����B
�ł��A�e�[�u���ɏ�肭���܂�܂����B
�܂��܂����Ԃ������肻���ł����A�y�����ł��B
�L���R�K�[�h������������A
�b�m�b�����A�X�^�[�g������A���Ă邾���I�I
���ۂ͂����Ȃ��Ƃ͂Ȃ��ł��傤���ǁB
�؎q�ɊW�Ȃ��Ȃ�̂ŁA��Ƃ����₷���Ȃ�̂͊m���ł��B
�^�]������A�ǂ��Ȃ邩�����ł��B
�͂Ă��āA�Ƃ������A���͍�邾���ł���B
TR 2019/03/02(Sat) 12:51 Re: �悤�₭�؎q�K�[�h
 mabo�����́B
mabo�����́B�����͐ߋ�ł��ˁB
�撷�̎d���̈�ŁA�ߏ��ɐ_�y������Ă���_�Ђɍs���Ă��܂����B
���������̂ŁA�ʂ��������o���Ă��������ŁA�������ƋA��B
�{���͓����̍s�������������������A��s���B
�Ƃ����̂��A�A�A
�؎q�K�[�h����̑��������܂����B
���́A�e�[�u���E���̎�g�ł��B
�E�ƍ��͍��E�Ώ̂łȂ��A
�܂��A������ƃ��[�^�[�̐؎q�K�[�h������̂Ō`���G�B
�ŁA�P�~�J���E�b�h�ŁA�؍�B
�����܂ł͗ǂ������A�A�A�B
���̌�A���f�ł����B
�{�`���������s�i����
TR 2019/03/03(Sun) 20:27 Re: �悤�₭�؎q�K�[�h
�s�q����C�����́B
�������݂��肪�Ƃ������܂��B
�s�q������C�c�h�x�܂��������ł��ˁB
���́C������ƁC�b�m�b�̕��́C�x�e�H�ł����C
���ꂱ��������C������肵�Ă܂��B
����ƁC�����́C������ƂR�c�v�����^�[�̕��ɂ�
�����Ă��܂��B
����قǐϋɓI�ɂł͂Ȃ��̂ł����C���ꂱ��C
����ׂ͂��܂�܂����B
�P�~�J���E�b�h�ł����C���͎g�������ƂȂ��̂ł����C
���\�Ȓl�i�����ł��傤���ˁB
���s���Ă��܂��ƁC��������ł���ˁB
�C����蒼���āC�Ē���ł��ˁB
����ƁC������H�̖�E�C�����l�ł����B
���́C���̂Ƃ���C��������Ȃ̂ŁC�^���s���ł��B
�������݂��肪�Ƃ������܂��B
�s�q������C�c�h�x�܂��������ł��ˁB
���́C������ƁC�b�m�b�̕��́C�x�e�H�ł����C
���ꂱ��������C������肵�Ă܂��B
����ƁC�����́C������ƂR�c�v�����^�[�̕��ɂ�
�����Ă��܂��B
����قǐϋɓI�ɂł͂Ȃ��̂ł����C���ꂱ��C
����ׂ͂��܂�܂����B
�P�~�J���E�b�h�ł����C���͎g�������ƂȂ��̂ł����C
���\�Ȓl�i�����ł��傤���ˁB
���s���Ă��܂��ƁC��������ł���ˁB
�C����蒼���āC�Ē���ł��ˁB
����ƁC������H�̖�E�C�����l�ł����B
���́C���̂Ƃ���C��������Ȃ̂ŁC�^���s���ł��B
mabo 2019/03/03(Sun) 22:08 No.1438 Re: �悤�₭�؎q�K�[�h
 mabo����A�����́B
mabo����A�����́B�R�c�v�����^�[�ł����B
�s�X�g���������ł��ˁB
��r�I�����ɂȂ��Ă����Ƃ����A�����������ŗǂ��ł���ˁH
�P�~�J���E�b�h�́A�I�[�N�V�����Ŏc�ނ������Ă����̂ŁA���߂܂����B
�����ɍς݂܂����B
�P�~�J���E�b�h�Ő��������̂ɁA
�A���~�ł́A���s���Ă��܂��Ďc�O�ł����B
�d�����Ȃ��̂ŁA�A���~�������܂�����i���
�ŁA���́A�ς�����i�b�g�����삵�܂���!!
�X�p�i�Ȃ��ŁA�Œ�ł���悤�ɂ��܂����B
���ꂱ��l���Ȃ���A�܂�����Ǝ��삵�Ă��܂��B
�����������A�A���~��������A�������o���܂��B
���x�́A�ł�܂���i��
TR 2019/03/08(Fri) 18:49 Re: �悤�₭�؎q�K�[�h
 mabo����A����ɂ��́B
mabo����A����ɂ��́B�߂�ǂ����������؎q�K�[�h�ɒ��肵�āA
�y��܂łقڂł��܂����B
�����܂肪�����������o�Ă��܂��āA
���������K�v�ł��B
����ƁA�����ɁA�t���C�X�Ճe�[�u���̎�O�������ŁA
�؎q�K�[�h�������Ă݂܂����B
���z�Ƃ��ẮA���\�֗��i�ł��B
����ƁA��O���X�ɂȂ�܂����A
�p���҂�����Ǝ��܂�܂����B
�����A�z��O�ł������A�����A�e�[�u����O���́A
���������Ă��܂������A
���ہA�g���Ă݂��
��O���́A�P�R�O�x�J�����`�̕����A�����ƕ֗��ł��B
TR 2019/03/11(Mon) 17:56 Re: �悤�₭�؎q�K�[�h
 mabo����ɂ��́A
mabo����ɂ��́A�����͋x�݂ł����B
�\�̋L�����܂����B
���������N���߂Ċm��\�������܂����B
�d���Ŋm��\���̎�t������Ă����̂ŁA
��Ȃ��\���͂ł��܂����B
����Ă݂Ďv���܂������A
���́A�D�G�ȃ\�t�g�̂��A�ŁA�e�X�̌��Z�z���������Ȃ�A
��́A�����v�Z�Ȃ�ł���ˁI�I
���Ȃ݂ɁA�������ԈႦ�āA�s�����ɍs���ĈÏؔԍ��̃��Z�b�g�����Ă��܂����i��
�؎q�K�[�h�ł����A
�Ȃ�Ƃ��A�قڊ������܂����B
�������߂Ă̐؎q�K�[�h�ł�����A
���쒆�ɕ��j�ύX�Ȃ�āA���x������͓̂�����O�B
����Ȃ��ƂŁA�����Ă����̂��A�K�[�h�̓��A�R�������ł��B
�ŏ�����A�����ȃA�N�������Ă����ʂɂȂ邩������Ȃ���ŁA
�啪�O�ɗ��D�����A�̂Ĕ��������̂ŁA
�̂ĔŁA���T�C�h�ƁA�R�������̃K�[�h�삵�܂����B
�o�������_�Ńe�[�u�������ƁA�A�A
����Ϗo�Ă��܂����A
�厲���A��O���ɐi�ނƁA��O���ɂ��郊�~�b�g�X�C�b�`�ɒB���Ȃ����_�ŁA�R�������̃K�[�h�ɏՓ˂��Ă��܂����Ƃł����I�I�I
�Ƃ肠�����A�R�����ɂ�����Ȃ��悤�ɁA�K�[�h�̈ꕔ���J�b�g����B
�؎q�̔r�o������āA�܂������l���悤�i��
TR 2019/03/12(Tue) 16:15 Re: �悤�₭�؎q�K�[�h
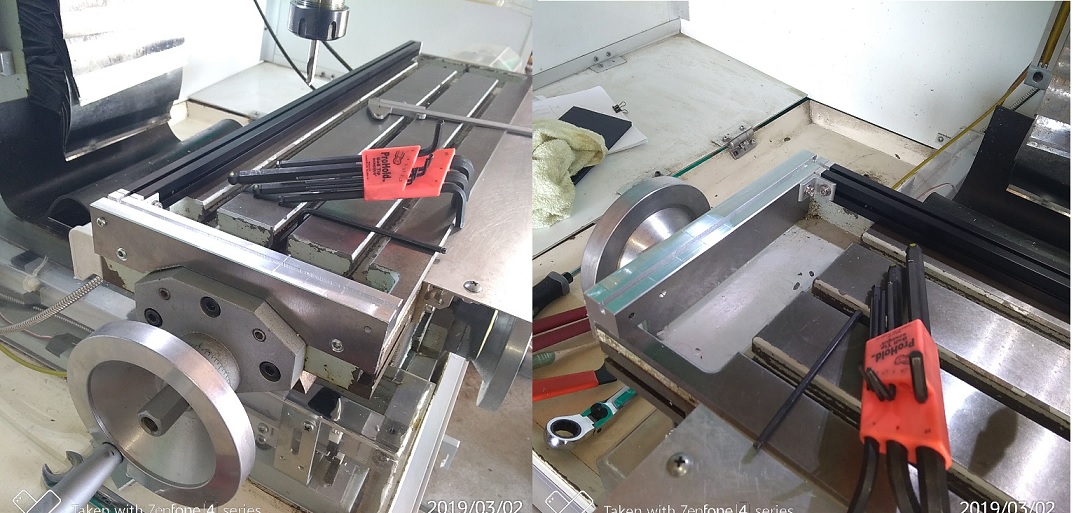
 �R�������̓y��́A���Q�O�̃A���~�t���[���ɂ��܂������A
�R�������̓y��́A���Q�O�̃A���~�t���[���ɂ��܂������A�ǂ����Ă��ז��ł��B
�����ŁA
�e�t�r�h�n�m�R�U�O�ŃC���[�W��͂�ł݂��B
�V�ѐS�ł���Ă݂܂����B
TR 2019/03/17(Sun) 21:06 Re: �悤�₭�؎q�K�[�h
�s�q����C�����́B
�܂��܂��C�T���X�ł��݂܂���B
�؎q�J�[�h�����Ƃ�����ł܂��ˁB
�������Ă݂�ƁC��͂�C�e�t�r�h�n�m�R�U�O�͗D����̂ł��B
�g�����Ȃ��܂łɁC��ςł��傤���ǁE�E�E�E�B
�R�c�v�����^�[�́C�����i�K�ŁC��������Ȓ��x�ł��B
�s���L���ł����ǁC�T���㔼�ŁC�g�������ȕ��C����悤�ł��ˁB
�A�N�����������ł���˂��B
�ȑO�C�ǂ����̂g�o�ŁC�A�N�����ŁC
�e�[�u���\�[�̊g���e�[�u�����쐬���Ă�����܂����ˁB
���\�Ȍ��݂̂��̎g���Ă��݂����ł�����C
�l�i�����\���������̂��ȂƐ��@���Ă܂��B
����ƁC�ȑO�C���[�o�[�̑��̃K���X����ꂽ�̂ŁC
���낢��l���܂������C�A�N�����ŁC��C���܂������C
�����A�N�����͒l�i�I�ɂĂɓ͂��Ȃ������̂ŁC
���ǔ����̌��݂̂��̂�\�荇�킹�āC���܂����B
�N�������ɂȂ��Ă���C�����ł��C�ƁC
���N�m��\���͂��Ă��܂��B
���́C�g�o��œ��͂��āC�d�^�b�N�X�ő��M���Ă܂��B
���N�́C�@�g����R����̊ҕt�ł����B
�܂��܂��C�T���X�ł��݂܂���B
�؎q�J�[�h�����Ƃ�����ł܂��ˁB
�������Ă݂�ƁC��͂�C�e�t�r�h�n�m�R�U�O�͗D����̂ł��B
�g�����Ȃ��܂łɁC��ςł��傤���ǁE�E�E�E�B
�R�c�v�����^�[�́C�����i�K�ŁC��������Ȓ��x�ł��B
�s���L���ł����ǁC�T���㔼�ŁC�g�������ȕ��C����悤�ł��ˁB
�A�N�����������ł���˂��B
�ȑO�C�ǂ����̂g�o�ŁC�A�N�����ŁC
�e�[�u���\�[�̊g���e�[�u�����쐬���Ă�����܂����ˁB
���\�Ȍ��݂̂��̎g���Ă��݂����ł�����C
�l�i�����\���������̂��ȂƐ��@���Ă܂��B
����ƁC�ȑO�C���[�o�[�̑��̃K���X����ꂽ�̂ŁC
���낢��l���܂������C�A�N�����ŁC��C���܂������C
�����A�N�����͒l�i�I�ɂĂɓ͂��Ȃ������̂ŁC
���ǔ����̌��݂̂��̂�\�荇�킹�āC���܂����B
�N�������ɂȂ��Ă���C�����ł��C�ƁC
���N�m��\���͂��Ă��܂��B
���́C�g�o��œ��͂��āC�d�^�b�N�X�ő��M���Ă܂��B
���N�́C�@�g����R����̊ҕt�ł����B
mabo 2019/03/25(Mon) 22:31 No.1444 Re: �悤�₭�؎q�K�[�h
 ���X�L��������܂��B
���X�L��������܂��B�����N�́C�@�g����R����̊ҕt�ł����B
�N���̏ꍇ���A����܂����A�����Ƃ������āA
�ی������́A�T������Ȃ������Ǝv���܂��B
���̑��Ɉ�ÁB
�Ȃ̂ŁA�m��\���͕K�{�ł��B
���́A�d�q�\�����ł���̂ŁA��ϕ֗��ɂȂ�܂����B
����҂����A�p�\�R�����o���������ǂ��ł���ˁB
mabo����́A���̓_�A�f���炵���B
�����́A�P�D�T����ҕt�ł����B
���z�ł����������̂ł���ˁi��
�؎q�K�[�h�ł����A
��O�̕ǂ��|���ɂ����W�ŁA
�ǂ��Œ肷��A�}�O�l�b�g�L���b�`���w�����܂����B
�}�O�l�b�g�L���b�`������A�ꉞ�����ł��B
���̌�́A�z�o�����Ƃ��������Ǝv���Ă��܂��B
�����A���̊W�ŁA�z�[�X�����܂��B
���ҊO�ꂶ��Ȃ��Ƃ����̂ł����A
�\�̋L���ɂ���悤�ɁA
�v���Ă����i�ƈႤ���i��������܂���B
�l�b�g�ʔ̂́A���i�������肸�炢�ꍇ������܂��ˁB
�s�q 2019/03/26(Tue) 06:07 No.1445
- JoyfulNote v6.02 -
++ Edited by Hamel ++