 Home
Home Item
Item �V�K���e
�V�K���e �A���o��
�A���o�� ���[�h����
���[�h���� �ߋ����O
�ߋ����O Topic
Topic Notice
Notice Admin
Admin
48���Ԉȓ��̋L����  �ŕ\������܂�
�ŕ\������܂�
�ŕ\������܂�
Re: ��10 PWM
> pos�ɂ��āA�l�b�g�������܂������A������܂���ł����B��������܂���
�����̕ϐ����ł��Ba,b,c���Ɠ����ł��B
���A�ꉞ�Ax9c_val��val��value(�l)���痈�Ă��܂��Bpos��POSITION�i�ʒu�j�ł��B
����Ȋ����ʼn��ƂȂ����ɕ����̂�t���Ă��邾���ł��B
> __delay_us(500);
> �������_���C�ɂȂ�܂��B
> ��R�l�ύX�ɗv���鎞�Ԃ��L��̂Ɩ����̂ł́A�����ł�Ɛ������܂��B
�ǂ̃v���O�����̎��ł��傤���H���܂ł͂ǂ������Ă���Ǝv���̂ł����ǁB�iX9C�Ɋւ��āj
�����̕ϐ����ł��Ba,b,c���Ɠ����ł��B
���A�ꉞ�Ax9c_val��val��value(�l)���痈�Ă��܂��Bpos��POSITION�i�ʒu�j�ł��B
����Ȋ����ʼn��ƂȂ����ɕ����̂�t���Ă��邾���ł��B
> __delay_us(500);
> �������_���C�ɂȂ�܂��B
> ��R�l�ύX�ɗv���鎞�Ԃ��L��̂Ɩ����̂ł́A�����ł�Ɛ������܂��B
�ǂ̃v���O�����̎��ł��傤���H���܂ł͂ǂ������Ă���Ǝv���̂ł����ǁB�iX9C�Ɋւ��āj
 �ҋ����b�N
�ҋ����b�N  2019/06/13(Thu) 17:25 No.1662
2019/06/13(Thu) 17:25 No.1662
Re: ��10 PWM
�������̕ϐ����ł��Ba,b,c���Ɠ����ł��B
���A�ꉞ�Ax9c_val��val��value(�l)���痈�Ă��܂��Bpos��POSITION�i�ʒu�j�ł��B
����Ȋ����ʼn��ƂȂ����ɕ����̂�t���Ă��邾���ł��B
�Ƃ������Ƃ́A�O���ϐ����P�s�lj����Ĉȉ��̒ʂ�ƂȂ�܂����H
//�O���ϐ�
volatile unsigned char MD5220_val = 64; //�d��ON�����C�p���Ԉʒu
volatile unsigned char pos;
���ɁA�f�o�C�X�̏������́A�ȉ��̒ʂ�ł�낵���킯�ł���ˁB
//�f�o�C�X��������
void MD5220(unsigned char pos) {
int t = pos - MD5220_val;
if (t > 0)ud = 1;
else {
ud = 0;
t = -t;
}
while (t) {
clk = 0;
clk = 1;
t--;
}
MD5220_val=pos;
}
�厖�Ȃ̂ŁA���A500�҂Ƃ������Ƃ͕��������Ă��܂����B
�f���ł̂����͓���B
�b�߂�܂����A
x9c�̉^�]�v���O�����́A���No1515�ł��B
�x�[�X�́A��������n�܂��Ă��܂��B
while�̒���500�҂Ƃ��������e������܂���B
�ȉ�����
x9c_init();
while(1){
static unsigned int adc[4]={0};
static char num=0;
unsigned int target=0;
adc[(++num)&3]=adconv();
for(char i=0;i<4;i++)target+=adc[i];
target/=40.9;
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
_delay_ms(1);
}
}
 TR 2019/06/13(Thu) 18:31 No.1663
TR 2019/06/13(Thu) 18:31 No.1663 Re: ��10 PWM
�s�q����C�ҋ����b�N����C�����́B
������ŁC���X�C�ċC���ł�
�s�q����C�T�O�O���Ȃ��Ƃ������Ƃł����ǁC
���L�̕����C
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
_delay_ms(1);
}
�ŁC�T�u���Cx9c_up()�@�Ɓ@x9c_down()���Ă�ł��܂��B
�T�O�O�́Cx9c_up()�@�Ɓ@x9c_down()�@�̒��ɂ���Ǝv���܂����C
������ƁC�m���߂ł݂Ă��������B
�T�Q�Q�O�Ƃh�q�e�V�S�O�i�b�m�b�@�R�O�S�O�@�̃��[�^�[�h���C�o�[�Ɏg���Ă���e�d�s�j���w�X�b����ɓ͂��܂����B
���Ă���̂ŁC�̂�т�s���܂��B
������ŁC���X�C�ċC���ł�
�s�q����C�T�O�O���Ȃ��Ƃ������Ƃł����ǁC
���L�̕����C
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
_delay_ms(1);
}
�ŁC�T�u���Cx9c_up()�@�Ɓ@x9c_down()���Ă�ł��܂��B
�T�O�O�́Cx9c_up()�@�Ɓ@x9c_down()�@�̒��ɂ���Ǝv���܂����C
������ƁC�m���߂ł݂Ă��������B
�T�Q�Q�O�Ƃh�q�e�V�S�O�i�b�m�b�@�R�O�S�O�@�̃��[�^�[�h���C�o�[�Ɏg���Ă���e�d�s�j���w�X�b����ɓ͂��܂����B
���Ă���̂ŁC�̂�т�s���܂��B
mabo 2019/06/13(Thu) 22:07 No.1664 Re: ��10 PWM
No1515�ł́A���̂悤�ɂȂ��Ă��܂��B
void x9c_dowm(void){
ud=0;
inc=0;
__delay_us(1);
inc=1;
if(x9c_val>0)x9c_val--;
//���̏グ������500us��
}
//�ȍ~�Ȃ̂ŁA500�͑҂��܂���B
5220�̏��������������I�ɂ͂������藈�Ă��܂���B
�������ƍl���Ă��������B
void x9c_dowm(void){
ud=0;
inc=0;
__delay_us(1);
inc=1;
if(x9c_val>0)x9c_val--;
//���̏グ������500us��
}
//�ȍ~�Ȃ̂ŁA500�͑҂��܂���B
5220�̏��������������I�ɂ͂������藈�Ă��܂���B
�������ƍl���Ă��������B
TR 2019/06/13(Thu) 22:23 No.1665 Re: ��10 PWM
> volatile unsigned char pos;
pos�͊O���ϐ��ł͂���܂���B
> //�f�o�C�X��������
> void AD5220(unsigned char pos) {
����AD5220���́u�����v�ł��B
���̈ʒu�ֈړ�����A�Ƃ����ڕW�ʒu�ł��B
AD5220(10);��10��pos�ł��B
�Ȃ̂ŁA���̊����瑀�삷����̂ł͂���܂���B
�i���̊����̂͏�������p���ł�����܂���B�������ɗ��p���Ă��邾���ł��B�j
���ۂ̏�������
AD5220_val=70;
while(AD5220_val)AD5220_down;
�̕����m���ł��B
> while�̒���500�҂Ƃ��������e������܂���B
�����ł͔{��1000us��1ms�ɂȂ��Ă��܂��B
�Ȃ̂ŁA���R���삪��邱�Ƃ͂���܂���B
���NjL���܂���
�ڕW�ʒu�ƌ��݂̃��C�p�[�ʒu�ƍ�������AUP��DOWN������킯�ł����ǁA�ڕW�ʒu�Ɋ��ɂ���ꍇ�͉������Ȃ���ł��B
����ŁA���̊Ԋu�i�����ł�1ms�j�ŃT���v�����O���������̂ŁA�T���v�����O�Ԋu�ʼnāAUP��DOWN���̕��ł�
500us�͎���Ă��܂���B�ܘ_�AUP��DOWN�������ۂɂ�2us���x�����܂����ǁA����͖������Ă��܂��B
��UP��DOWN�����i�̍Ŋ��j��__delay_us(500);������Ă��܂��ƁA
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
__delay_ms(1);
}
�̕��������L�̂悤�ɂ��Ȃ���Ȃ�Ȃ��̂ŁA�]�v����ɂ����Ȃ�܂��B
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
else __delay_us(500);//�������Ȃ��������������x�ށB���ۂɂ�502us�̕������߂��l
__delay_us(500);
}
�X�ɒNjL�B
���̂��AAD5220��MD5220�ƂȂ��Đi�s���Ă��܂����B
�Ȃ̂ŁA���̕������܂����B
pos�͊O���ϐ��ł͂���܂���B
> //�f�o�C�X��������
> void AD5220(unsigned char pos) {
����AD5220���́u�����v�ł��B
���̈ʒu�ֈړ�����A�Ƃ����ڕW�ʒu�ł��B
AD5220(10);��10��pos�ł��B
�Ȃ̂ŁA���̊����瑀�삷����̂ł͂���܂���B
�i���̊����̂͏�������p���ł�����܂���B�������ɗ��p���Ă��邾���ł��B�j
���ۂ̏�������
AD5220_val=70;
while(AD5220_val)AD5220_down;
�̕����m���ł��B
> while�̒���500�҂Ƃ��������e������܂���B
�����ł͔{��1000us��1ms�ɂȂ��Ă��܂��B
�Ȃ̂ŁA���R���삪��邱�Ƃ͂���܂���B
���NjL���܂���
�ڕW�ʒu�ƌ��݂̃��C�p�[�ʒu�ƍ�������AUP��DOWN������킯�ł����ǁA�ڕW�ʒu�Ɋ��ɂ���ꍇ�͉������Ȃ���ł��B
����ŁA���̊Ԋu�i�����ł�1ms�j�ŃT���v�����O���������̂ŁA�T���v�����O�Ԋu�ʼnāAUP��DOWN���̕��ł�
500us�͎���Ă��܂���B�ܘ_�AUP��DOWN�������ۂɂ�2us���x�����܂����ǁA����͖������Ă��܂��B
��UP��DOWN�����i�̍Ŋ��j��__delay_us(500);������Ă��܂��ƁA
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
__delay_ms(1);
}
�̕��������L�̂悤�ɂ��Ȃ���Ȃ�Ȃ��̂ŁA�]�v����ɂ����Ȃ�܂��B
if(target>x9c_val)x9c_up();
else if(target<x9c_val)x9c_down();
else __delay_us(500);//�������Ȃ��������������x�ށB���ۂɂ�502us�̕������߂��l
__delay_us(500);
}
�X�ɒNjL�B
���̂��AAD5220��MD5220�ƂȂ��Đi�s���Ă��܂����B
�Ȃ̂ŁA���̕������܂����B
�ҋ����b�N 2019/06/13(Thu) 22:32 No.1666 Re: ��10 PWM
AD5220�ɂ���
�����ۂ̏�������
AD5220_val=70;
while(AD5220_val)AD5220_down;
�̕����m���ł��B
���̂��������ł́A���������́A���L�̒ʂ�Ɠǂ߂܂����AOK�ł��傤���H
�m�F�������Ǝv���܂��B
�@�@�@�L
//�f�o�C�X��������
AD5220_val=70;
while(AD5220_val)AD5220_down;
�܂����̕ύX�ɔ����āA�����O���ϐ�
//�O���ϐ�
volatile unsigned char MD5220_val = 64; //�d��ON�����C�p���Ԉʒu
����́A���̂܂c���̂ł��傤���H
x9c�ɂ���
>����ŁA���̊Ԋu�i�����ł�1ms�j�ŃT���v�����O���������̂ŁA
�T���v�����O���UP/DOWN����킯�ł����AUP/DOWN�ɕK�v�Ȏ��Ԃ�1ms�Ƃ��Ă��܂��B
1ms�ł͂Ȃ�,100ns�`500ns�ł͂܂����̂ł��傤���H
��R�l�ϊ��ɕK�v�Ȏ��Ԃ��Ă܂ő҂��R�͉�������̂ł��傤���H
�K�v�ȏ�ɑ҂悤�Ɍ����Ă��܂��܂����B
����Ƃ��A���߂��Ⴄ�̂ł��傤���B
�����ۂ̏�������
AD5220_val=70;
while(AD5220_val)AD5220_down;
�̕����m���ł��B
���̂��������ł́A���������́A���L�̒ʂ�Ɠǂ߂܂����AOK�ł��傤���H
�m�F�������Ǝv���܂��B
�@�@�@�L
//�f�o�C�X��������
AD5220_val=70;
while(AD5220_val)AD5220_down;
�܂����̕ύX�ɔ����āA�����O���ϐ�
//�O���ϐ�
volatile unsigned char MD5220_val = 64; //�d��ON�����C�p���Ԉʒu
����́A���̂܂c���̂ł��傤���H
x9c�ɂ���
>����ŁA���̊Ԋu�i�����ł�1ms�j�ŃT���v�����O���������̂ŁA
�T���v�����O���UP/DOWN����킯�ł����AUP/DOWN�ɕK�v�Ȏ��Ԃ�1ms�Ƃ��Ă��܂��B
1ms�ł͂Ȃ�,100ns�`500ns�ł͂܂����̂ł��傤���H
��R�l�ϊ��ɕK�v�Ȏ��Ԃ��Ă܂ő҂��R�͉�������̂ł��傤���H
�K�v�ȏ�ɑ҂悤�Ɍ����Ă��܂��܂����B
����Ƃ��A���߂��Ⴄ�̂ł��傤���B
TR 2019/06/14(Fri) 05:41 No.1668 Re: ��10 PWM
AD5220�̏������Ɋւ��Ăł����ǁA�p���[�I���ŁA���C�p�[�ʒu��64�ł��B
�ł��APIC�������N������Ƃ��āACLK�͂��̒��O�̓t���[�e�B���O��H��L���͔���Ȃ���ł��B
�ŁA�����AH���������PIC�̃s���̏������ŁA.
> PORTA = 0x00; //�S��Lo
> PORTB = 0x00; //�S��Lo
> ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
> ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
> // ���o�͐ݒ�
> TRISA = 0b00000000; // RA�S�ďo��
> TRISB = 0b00001000; //RB3 ADC�p���͒[�q
�Ƃ���ƁALOW�o�͂ɂȂ��ŁA���̎���1�N���b�N�����Ă��܂����ƂɂȂ�܂��B
�ܘ_�A�����ŁA������PORT����ŁACLK�s����HIGH�ɂ��Ă���o�͂ɂ���Α��v�Ȃ̂ł����ǁA
�����̔��q�ɁA�܂��S��LOW�ɂ���Ă��܂��\��������܂��B
���������������l������A���ʂȍ�Ƃ����Ă����������ǂ��A�Ƃ������ł��B
�������u���v�ɂ��Ăق����Ȃ�
void AD5220_init(void){
__delay_ms(1);
AD5220_val=70;
while(AD5220_val)AD5220_down;
}
�ƌ��������ł��傤���B
�O���ϐ��̐錾�͖ܘ_�c���܂��B
�T���v�����O�Ɋւ��Ă͍l�������Ⴂ�܂��B
MACH�����PWM�������l�����āA�T���v�����O���ƃT���v�����O�Ԋu�����߂܂��B
�i�A�i���O�擾�Ȃ�j
�t�Ɍ����A�T���v�����O���ƊԊu����MACH��PWM���������߂Ă��ǂ��ł��B
�ŁA�T���v�����O�Ԋu��500us�ȏ�ɂ��Ă��������������A�Ƃ������Ƃł��B
���ۂɂ�typ100us���x�Ȃ̂ŁA150us�ł����͖����Ǝv���܂��B
�ł��APIC�������N������Ƃ��āACLK�͂��̒��O�̓t���[�e�B���O��H��L���͔���Ȃ���ł��B
�ŁA�����AH���������PIC�̃s���̏������ŁA.
> PORTA = 0x00; //�S��Lo
> PORTB = 0x00; //�S��Lo
> ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
> ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
> // ���o�͐ݒ�
> TRISA = 0b00000000; // RA�S�ďo��
> TRISB = 0b00001000; //RB3 ADC�p���͒[�q
�Ƃ���ƁALOW�o�͂ɂȂ��ŁA���̎���1�N���b�N�����Ă��܂����ƂɂȂ�܂��B
�ܘ_�A�����ŁA������PORT����ŁACLK�s����HIGH�ɂ��Ă���o�͂ɂ���Α��v�Ȃ̂ł����ǁA
�����̔��q�ɁA�܂��S��LOW�ɂ���Ă��܂��\��������܂��B
���������������l������A���ʂȍ�Ƃ����Ă����������ǂ��A�Ƃ������ł��B
�������u���v�ɂ��Ăق����Ȃ�
void AD5220_init(void){
__delay_ms(1);
AD5220_val=70;
while(AD5220_val)AD5220_down;
}
�ƌ��������ł��傤���B
�O���ϐ��̐錾�͖ܘ_�c���܂��B
�T���v�����O�Ɋւ��Ă͍l�������Ⴂ�܂��B
MACH�����PWM�������l�����āA�T���v�����O���ƃT���v�����O�Ԋu�����߂܂��B
�i�A�i���O�擾�Ȃ�j
�t�Ɍ����A�T���v�����O���ƊԊu����MACH��PWM���������߂Ă��ǂ��ł��B
�ŁA�T���v�����O�Ԋu��500us�ȏ�ɂ��Ă��������������A�Ƃ������Ƃł��B
���ۂɂ�typ100us���x�Ȃ̂ŁA150us�ł����͖����Ǝv���܂��B
�ҋ����b�N 2019/06/14(Fri) 06:52 No.1669 Re: ��10 PWM
���������u���v�ɂ��Ăق����Ȃ�
void AD5220_init(void){
__delay_ms(1);
AD5220_val=70;
while(AD5220_val)AD5220_down;
}
�ƌ��������ł��傤���B
���肪�Ƃ��������܂��B
����ł����Ă݂܂��B
>MACH�����PWM�������l�����āA�T���v�����O���ƃT���v�����O�Ԋu�����߂܂��i�A�i���O�擾�Ȃ�j
�����ł������A
����́AMACH��PWM��{���g��100Hz����{�Ƃ��Ă����Ǝv���܂��B
���ۂ�MACH�́A100Hz�ɂ��ăX�^�[�g���܂��B
����������������������������
mabo����ցA
AD5220�����Ƃ������ƂŁA�������ł����ł�����A���ʂ�����I���Ă��������B
TR 2019/06/14(Fri) 07:58 No.1670 Re: ��10 PWM
�݂�Ȃŋ��ʗ�����}�肽���Ǝv���܂��B
AD5220�^�]�p�v���O����
//RB3���ėp�o��14�ԁQSEC��|�[�g2��SL-18��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//UD�s����RA0�q��
//INC�s����RA1�q��
//CS��GND�Ɍq��
//PIC16F1827 Configuration Bit Settings
// CONFIG1
��
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define clk LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //�A�i���O�l�̕ϊ���
//�O���ϐ�
volatile unsigned char AD5220_val = 64; //�p���[�I���ŁA���C�p�[�ʒu��64
//U/D_up��
void AD5220_up(void) {
ud = 1;
clk = 0;
clk = 1;
if (AD5220_val < 127)AD5220_val++;
}
//U/Ddown��
void AD5220_down(void) {
ud = 0;
clk = 0;
clk = 1;
if (AD5220_val > 0)AD5220_val--;
}
//�f�o�C�X��������
void AD5220_init(void) {
__delay_ms(1);
AD5220_val = 70;
while (AD5220_val)AD5220_down;
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
for (char i = 0; i < 32; i++)target += adc[i];
target = target >> 8;
if (target > AD5220_val) {
AD5220_up();
} else if (target < AD5220_val) {
AD5220_down(); //U/Ddown���Ăяo��
}
}
}
// �A�i���O�l�̕ϊ���
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
AD5220�^�]�p�v���O����
//RB3���ėp�o��14�ԁQSEC��|�[�g2��SL-18��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//UD�s����RA0�q��
//INC�s����RA1�q��
//CS��GND�Ɍq��
//PIC16F1827 Configuration Bit Settings
// CONFIG1
��
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define clk LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //�A�i���O�l�̕ϊ���
//�O���ϐ�
volatile unsigned char AD5220_val = 64; //�p���[�I���ŁA���C�p�[�ʒu��64
//U/D_up��
void AD5220_up(void) {
ud = 1;
clk = 0;
clk = 1;
if (AD5220_val < 127)AD5220_val++;
}
//U/Ddown��
void AD5220_down(void) {
ud = 0;
clk = 0;
clk = 1;
if (AD5220_val > 0)AD5220_val--;
}
//�f�o�C�X��������
void AD5220_init(void) {
__delay_ms(1);
AD5220_val = 70;
while (AD5220_val)AD5220_down;
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
for (char i = 0; i < 32; i++)target += adc[i];
target = target >> 8;
if (target > AD5220_val) {
AD5220_up();
} else if (target < AD5220_val) {
AD5220_down(); //U/Ddown���Ăяo��
}
}
}
// �A�i���O�l�̕ϊ���
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
TR 2019/06/14(Fri) 13:39 No.1671 Re: ��10 PWM
x9c�^�]�p�v���O����
//RB3���ėp�o��14�ԁQSEC��|�[�g2��SL-18��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//UD�s����RA0�q��
//INC�s����RA1�q��
//CS��GND�Ɍq��
//PIC16F1827 Configuration Bit Settings
// CONFIG1
��
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define inc LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //ADC�ǂݍ��݊�
//�O���ϐ�
char x9c_val; //���C�p�ʒu
//�f�o�C�X��������
void x9c_init(void) {
ud = 0;
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500); //��R�l�ύX�ɂ����鎞��
}
x9c_val = 0;
}
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
}
//U/Ddown��
void x9c_dowm(void) {
ud = 0;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val > 0)x9c_val--;
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
x9c_init(); //���������Ăяo��
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
for (char i = 0; i < 32; i++)target += adc[i];
target /= 327.4;
if (target > x9c_val) {
x9c_up();//Up���Ăяo��
} else if (target < x9c_val) {
x9c_dowm();//Ddown���Ăяo��
}
__delay_ns(100);//MACH�����PWM�������l�����āA�T���v�����O���ƃT���v�����O�Ԋu�����߂܂����A�b��100ns.
}
}
// �A�i���O�l�̕ϊ���
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
//RB3���ėp�o��14�ԁQSEC��|�[�g2��SL-18��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//UD�s����RA0�q��
//INC�s����RA1�q��
//CS��GND�Ɍq��
//PIC16F1827 Configuration Bit Settings
// CONFIG1
��
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define inc LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //ADC�ǂݍ��݊�
//�O���ϐ�
char x9c_val; //���C�p�ʒu
//�f�o�C�X��������
void x9c_init(void) {
ud = 0;
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500); //��R�l�ύX�ɂ����鎞��
}
x9c_val = 0;
}
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
}
//U/Ddown��
void x9c_dowm(void) {
ud = 0;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val > 0)x9c_val--;
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
x9c_init(); //���������Ăяo��
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
for (char i = 0; i < 32; i++)target += adc[i];
target /= 327.4;
if (target > x9c_val) {
x9c_up();//Up���Ăяo��
} else if (target < x9c_val) {
x9c_dowm();//Ddown���Ăяo��
}
__delay_ns(100);//MACH�����PWM�������l�����āA�T���v�����O���ƃT���v�����O�Ԋu�����߂܂����A�b��100ns.
}
}
// �A�i���O�l�̕ϊ���
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
TR 2019/06/14(Fri) 13:43 No.1672 Re: ��10 PWM
x9c�^�]�p�v���O�����ƈႤ�������ȉ��̂悤�ɒ��L���܂����B
���@�������������������̕�����x9c�^�]�p�v���O�����ƈႤ
x9c�e�X�g�p�@�v���O����
//RB3���ėp�o��14�ԁQSEC��|�[�g2��SL-18��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//UD�s����RA0�q��
//INC�s����RA1�q��
//CS��GND�Ɍq��
//PIC16F1827 Configuration Bit Settings
// CONFIG1
��
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define inc LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //ADC�ǂݍ��݊�
//�O���ϐ�
char x9c_val; //���C�p�ʒu
//�f�o�C�X��������
void x9c_init(void) {
ud = 0;
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500); //��R�l�ύX�ɂ����鎞��
}
x9c_val = 0;
}
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
__delay_us(100);
//���̏グ������500us��
}
//U/Ddown��
void x9c_down(void) {
ud = 0;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val > 0)x9c_val--;
__delay_us(100);���@�������������������̕�����x9c�^�]�p�v���O�����ƈႤ
//���̏グ������500us��
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
x9c_init(); //���������Ăяo��
while(1){
for(char i=0;i<=100;i++){
x9c_up();
__delay_us(500);
}
__delay_ms(5000);
for(char i=0;i<=100;i++){
x9c_down();
__delay_us(500);�@���@�������������������̕�����x9c�^�]�p�v���O�����ƈႤ
}
__delay_ms(5000);
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
���@�������������������̕�����x9c�^�]�p�v���O�����ƈႤ
x9c�e�X�g�p�@�v���O����
//RB3���ėp�o��14�ԁQSEC��|�[�g2��SL-18��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//UD�s����RA0�q��
//INC�s����RA1�q��
//CS��GND�Ɍq��
//PIC16F1827 Configuration Bit Settings
// CONFIG1
��
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define inc LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //ADC�ǂݍ��݊�
//�O���ϐ�
char x9c_val; //���C�p�ʒu
//�f�o�C�X��������
void x9c_init(void) {
ud = 0;
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500); //��R�l�ύX�ɂ����鎞��
}
x9c_val = 0;
}
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
__delay_us(100);
//���̏グ������500us��
}
//U/Ddown��
void x9c_down(void) {
ud = 0;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val > 0)x9c_val--;
__delay_us(100);���@�������������������̕�����x9c�^�]�p�v���O�����ƈႤ
//���̏グ������500us��
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
x9c_init(); //���������Ăяo��
while(1){
for(char i=0;i<=100;i++){
x9c_up();
__delay_us(500);
}
__delay_ms(5000);
for(char i=0;i<=100;i++){
x9c_down();
__delay_us(500);�@���@�������������������̕�����x9c�^�]�p�v���O�����ƈႤ
}
__delay_ms(5000);
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
TR 2019/06/14(Fri) 17:14 No.1673 Re: ��10 PWM
mabo����A���͂悤�������܂��B
���̍ہA�������AAD5220���w�����悤���Ǝv���܂��B
�w����́ARS�ł��傤���H
https://jp.rs-online.com/web/
���̍ہA�������AAD5220���w�����悤���Ǝv���܂��B
�w����́ARS�ł��傤���H
https://jp.rs-online.com/web/
TR 2019/06/15(Sat) 05:55 No.1674 Re: ��10 PWM
mabo����A�����Ď��炵�܂��B
AD5220�ł��B
No1650�ŁA
�����ƁA���̃f�o�C�X��7�r�b�g�Ȃ̂ŁA
�~�@target /=327.4;
���@target=target>>8;
�ł��B
�Ƃ���܂��B
�����Ƃ��ẮA����\�ׂ�ƁA
�����킩�����悤�ȁB
����̗�ŋ�̓I�ɋC�ɂȂ�_�́A
8�r�b�g��PIC���v�Z�����l�ŁA7�r�b�g�̎�M�@�ł���AD5220�Ƃ̂�����
���܂������̂��낤���Ƃ������Ƃł��B
AD5220�ł��B
No1650�ŁA
�����ƁA���̃f�o�C�X��7�r�b�g�Ȃ̂ŁA
�~�@target /=327.4;
���@target=target>>8;
�ł��B
�Ƃ���܂��B
�����Ƃ��ẮA����\�ׂ�ƁA
�����킩�����悤�ȁB
����̗�ŋ�̓I�ɋC�ɂȂ�_�́A
8�r�b�g��PIC���v�Z�����l�ŁA7�r�b�g�̎�M�@�ł���AD5220�Ƃ̂�����
���܂������̂��낤���Ƃ������Ƃł��B
TR 2019/06/15(Sat) 09:35 No.1675 Re: ��10 PWM
> �~�@target /=327.4;
�����100�����ɂȂ�悤�Ɋ����Ă��܂���ˁH
�ł�����̃f�o�C�X��0�`127�͈̔͂ɂȂ�悤�ɂ��܂��B
�������傫�ȈႢ�ł��B
target/=128;
�ł��ǂ��ł��B
> 8�r�b�g��PIC���v�Z�����l�ŁA7�r�b�g�̎�M�@�ł���AD5220
���쎩�̂�1�r�b�g�̃V���A���ł��B���̃J�E���^�̃�������7�r�b�g�Ȃ����ł��B
�iPIC�ł�8�r�b�g�̃^�C�}�[��16�r�b�g�̃^�C�}�[������ł���H
���W�X�^�̒��ɂ�7�r�b�g�̂��̂����邩������܂���B����ǁA����Ƒ���͑S���̕ʕ��ł��j
7�r�b�g�̃������Ƃ����̂͒P��0�`127�܂Ő�������A�Ƃ������ł��B
x9c�����āA�g�p��������7�r�b�g�ł��傤�B
�Ⴆ�A16�r�b�g�̃p���������삾�����Ƃ��Ă��A16�s�������킹�Ă���N���b�N�����邾���ł��B
8�r�b�g�}�C�R���ł͏o���Ȃ��A�Ƃ����킯�ł͂���܂���B
�����100�����ɂȂ�悤�Ɋ����Ă��܂���ˁH
�ł�����̃f�o�C�X��0�`127�͈̔͂ɂȂ�悤�ɂ��܂��B
�������傫�ȈႢ�ł��B
target/=128;
�ł��ǂ��ł��B
> 8�r�b�g��PIC���v�Z�����l�ŁA7�r�b�g�̎�M�@�ł���AD5220
���쎩�̂�1�r�b�g�̃V���A���ł��B���̃J�E���^�̃�������7�r�b�g�Ȃ����ł��B
�iPIC�ł�8�r�b�g�̃^�C�}�[��16�r�b�g�̃^�C�}�[������ł���H
���W�X�^�̒��ɂ�7�r�b�g�̂��̂����邩������܂���B����ǁA����Ƒ���͑S���̕ʕ��ł��j
7�r�b�g�̃������Ƃ����̂͒P��0�`127�܂Ő�������A�Ƃ������ł��B
x9c�����āA�g�p��������7�r�b�g�ł��傤�B
�Ⴆ�A16�r�b�g�̃p���������삾�����Ƃ��Ă��A16�s�������킹�Ă���N���b�N�����邾���ł��B
8�r�b�g�}�C�R���ł͏o���Ȃ��A�Ƃ����킯�ł͂���܂���B
�ҋ����b�N 2019/06/15(Sat) 10:45 No.1676 Re: ��10 PWM
�@target /=327.4;
����327.4�Ƃ��������́A
10�r�b�g1024�����̕���\�Ȃ����ł��ˁB
�ȑO�ł̂����ňȉ��̒ʂ�������Ă���܂����B
���@
�܂�A�ő�l��1023*4��4092�ł��B���ꂪ100�����ɂȂ�悤��40.9�Ŋ����Ă��܂��B
�����C�Â��܂������ǁA�ő�l��99�ɂȂ�悤�ɂ��ׂ��ł��ˁB
�Ȃ̂ŁA40.93�Ŋ����������ǂ��ł��B
�ŁA327.4�́A32��̃T���v�����O�̏ꍇ�ł��B
�����Ȑ������o�Ă��܂����A
������̃f�o�C�X��0�`127�͈̔͂�
����́A��R�l�̒i���ł��傤���H
�T���v�����O���炭�鐔�l�Ɠ����l���������āA���ʂǂ��Ȃ̂ł����H
��target/=128;
�v���O�������ς��܂����ˁB
�����܂��ˁB
�F�X�ƌ����Ă��܂����A�ǂ��킩��Ȃ��̂ł��B
����ƁA����\�Ƃ����P��ׂ��Ƃ���ł�����B
�Ƃ������A
���A���Ȃ�A�v���O�����͕ς��܂��B
�ł�����A�����I�ɏ����o���̂ł͂Ȃ��A
�S�̂������ŁA���A�ύX�ӏ��͂������ƌ����Ă��ꂽ�����ǂ��̂ł��B
�s���Ⴂ�����Ȃ��Ȃ�܂��B
�ł��A������A��Ԃ�������ł��傤����A���C�����܂��B
����327.4�Ƃ��������́A
10�r�b�g1024�����̕���\�Ȃ����ł��ˁB
�ȑO�ł̂����ňȉ��̒ʂ�������Ă���܂����B
���@
�܂�A�ő�l��1023*4��4092�ł��B���ꂪ100�����ɂȂ�悤��40.9�Ŋ����Ă��܂��B
�����C�Â��܂������ǁA�ő�l��99�ɂȂ�悤�ɂ��ׂ��ł��ˁB
�Ȃ̂ŁA40.93�Ŋ����������ǂ��ł��B
�ŁA327.4�́A32��̃T���v�����O�̏ꍇ�ł��B
�����Ȑ������o�Ă��܂����A
������̃f�o�C�X��0�`127�͈̔͂�
����́A��R�l�̒i���ł��傤���H
�T���v�����O���炭�鐔�l�Ɠ����l���������āA���ʂǂ��Ȃ̂ł����H
��target/=128;
�v���O�������ς��܂����ˁB
�����܂��ˁB
�F�X�ƌ����Ă��܂����A�ǂ��킩��Ȃ��̂ł��B
����ƁA����\�Ƃ����P��ׂ��Ƃ���ł�����B
�Ƃ������A
���A���Ȃ�A�v���O�����͕ς��܂��B
�ł�����A�����I�ɏ����o���̂ł͂Ȃ��A
�S�̂������ŁA���A�ύX�ӏ��͂������ƌ����Ă��ꂽ�����ǂ��̂ł��B
�s���Ⴂ�����Ȃ��Ȃ�܂��B
�ł��A������A��Ԃ�������ł��傤����A���C�����܂��B
TR 2019/06/15(Sat) 11:15 No.1677 Re: ��10 PWM
> 10�r�b�g1024�����̕���\�Ȃ����ł��ˁB
> �ȑO�ł̂����ňȉ��̒ʂ�������Ă���܂����B
10�r�b�g1024�����̕���\��PIC(16f1827)��ADC�̕���\�ł��B0�`1023�̒l���Ԃ��Ă��܂��B
> ����́A��R�l�̒i���ł��傤���H
�����ł��B��R�l�̒i�����A���C�p�[�ʒu���A128(100)�|�W�V�������}�������Ӗ��ł��B
X9C�ł͒l��0�`99�͈̔͂ɂȂ�悤�ɁAAD5220�ł͒l��0�`127�͈̔͂ɂȂ�悤�Ɋ����Ă��܂��B
> �T���v�����O���炭�鐔�l�Ɠ����l���������āA���ʂǂ��Ȃ̂ł����H
�����Ă���Ӗ����悭����܂���B
Mach���瑬�x��PWM�Ƃ����`�ő����Ă��܂��B����͐ݒ肵���ō����x�ɑ��Ă�HIGH�̎���/�����Ƃ����`�ŁA�܂�ō����x�ɑ��Ă������ő����Ă��܂��B
�t�B���^�[��t���ăA�i���O��M�����Ƃ��Ă��A�������ƂŁA�����ADC�l/1023���ō����x�ɑ��Ă̊����ɂȂ�܂��B
�ŁA�o�͂̕��͂��̊����ŁA���̃A�i���O�|�e���V���i�̃��C�p�[�ʒu�j�𑀍삷�邱�ƂɂȂ�܂��B
> �v���O�������ς��܂����ˁB
> �����܂��ˁB
��������̂��Ƃ������Ă���̂��悭����܂���B
<�NjL���܂�>
��{�I�ɕ����ꂽ���Ƃ����i���������j�����ŁA�V���ɉ�������������͂���܂���B
����ƁA��̊m�F�p�v���O�����ł����ǁA
adconv()
x9c_init()
�͗v��܂���B�i�v���O�����͏��������Ȃ��Ă����͂���܂���j
�����āAMACH�iSS�{�[�h�ASEC�{�[�h�j�Ƃ͌q���܂���B
�ܘ_�ALED���{�����[�����q���܂���B
�i������̕����d�v�ł��j
X9C�̒P�̂̃e�X�g�ł�����APIC��X9C���q���œd�����v�����Ă��������B
> �ȑO�ł̂����ňȉ��̒ʂ�������Ă���܂����B
10�r�b�g1024�����̕���\��PIC(16f1827)��ADC�̕���\�ł��B0�`1023�̒l���Ԃ��Ă��܂��B
> ����́A��R�l�̒i���ł��傤���H
�����ł��B��R�l�̒i�����A���C�p�[�ʒu���A128(100)�|�W�V�������}�������Ӗ��ł��B
X9C�ł͒l��0�`99�͈̔͂ɂȂ�悤�ɁAAD5220�ł͒l��0�`127�͈̔͂ɂȂ�悤�Ɋ����Ă��܂��B
> �T���v�����O���炭�鐔�l�Ɠ����l���������āA���ʂǂ��Ȃ̂ł����H
�����Ă���Ӗ����悭����܂���B
Mach���瑬�x��PWM�Ƃ����`�ő����Ă��܂��B����͐ݒ肵���ō����x�ɑ��Ă�HIGH�̎���/�����Ƃ����`�ŁA�܂�ō����x�ɑ��Ă������ő����Ă��܂��B
�t�B���^�[��t���ăA�i���O��M�����Ƃ��Ă��A�������ƂŁA�����ADC�l/1023���ō����x�ɑ��Ă̊����ɂȂ�܂��B
�ŁA�o�͂̕��͂��̊����ŁA���̃A�i���O�|�e���V���i�̃��C�p�[�ʒu�j�𑀍삷�邱�ƂɂȂ�܂��B
> �v���O�������ς��܂����ˁB
> �����܂��ˁB
��������̂��Ƃ������Ă���̂��悭����܂���B
<�NjL���܂�>
��{�I�ɕ����ꂽ���Ƃ����i���������j�����ŁA�V���ɉ�������������͂���܂���B
����ƁA��̊m�F�p�v���O�����ł����ǁA
adconv()
x9c_init()
�͗v��܂���B�i�v���O�����͏��������Ȃ��Ă����͂���܂���j
�����āAMACH�iSS�{�[�h�ASEC�{�[�h�j�Ƃ͌q���܂���B
�ܘ_�ALED���{�����[�����q���܂���B
�i������̕����d�v�ł��j
X9C�̒P�̂̃e�X�g�ł�����APIC��X9C���q���œd�����v�����Ă��������B
�ҋ����b�N 2019/06/15(Sat) 11:43 No.1678 Re: ��10 PWM
�s�q����C�ҋ����b�N����C�����́B
���X�x���Ȃ�܂����B
���̂Ƃ���C���Ƃ̑�����ŁC���Ԏ���Ă��܂��B
��Ƃ̓r���ŁC�����̊����@�̃l�W���Ȃ��Ȃ�����C
�ŁC���x�����f�ł��B
�������炢�ŁC�I��邩�Ȃ��B
�`�c�T�Q�Q�O�ł����C�����ł��B
https://jp.rs-online.com/web/c/semiconductors/data-converters/digital-potentiometers/?searchTerm=AD5220&redirect-relevancy-data=636F3D3126696E3D4931384E53656172636847656E65726963266C753D6A61266D6D3D6D61746368616C6C7061727469616C26706D3D5E5B5C707B4C7D5C707B4E647D2D2C2F255C2E5D2B2426706F3D31313326736E3D592673723D2673743D4B4559574F52445F53494E474C455F414C5048415F4E554D455249432677633D4E4F4E45267573743D414435323230267374613D41443532323026&r=f&searchHistory=%7B%22enabled%22:true%7D
�ŋ��߂܂����B
����ƍ����ł��ˁB�ł��C�T�O�Ȃ�Ă���܂�����̂ˁB
�Ɍ��āC���ꂱ�����Ă܂������C
���j�^�[�p�ɍ�����k�b�c��j��������C�莝���̂P�U�e�W�W�S���j��������ƁC
�g���u�������ł����B
����������ƂŁC�m�F�ł��邩�Ǝv���܂��B
���X�x���Ȃ�܂����B
���̂Ƃ���C���Ƃ̑�����ŁC���Ԏ���Ă��܂��B
��Ƃ̓r���ŁC�����̊����@�̃l�W���Ȃ��Ȃ�����C
�ŁC���x�����f�ł��B
�������炢�ŁC�I��邩�Ȃ��B
�`�c�T�Q�Q�O�ł����C�����ł��B
https://jp.rs-online.com/web/c/semiconductors/data-converters/digital-potentiometers/?searchTerm=AD5220&redirect-relevancy-data=636F3D3126696E3D4931384E53656172636847656E65726963266C753D6A61266D6D3D6D61746368616C6C7061727469616C26706D3D5E5B5C707B4C7D5C707B4E647D2D2C2F255C2E5D2B2426706F3D31313326736E3D592673723D2673743D4B4559574F52445F53494E474C455F414C5048415F4E554D455249432677633D4E4F4E45267573743D414435323230267374613D41443532323026&r=f&searchHistory=%7B%22enabled%22:true%7D
�ŋ��߂܂����B
����ƍ����ł��ˁB�ł��C�T�O�Ȃ�Ă���܂�����̂ˁB
�Ɍ��āC���ꂱ�����Ă܂������C
���j�^�[�p�ɍ�����k�b�c��j��������C�莝���̂P�U�e�W�W�S���j��������ƁC
�g���u�������ł����B
����������ƂŁC�m�F�ł��邩�Ǝv���܂��B
mabo 2019/06/15(Sat) 22:11 No.1679 Re: ��10 PWM
 >�@MABO����
>�@MABO����> ���j�^�[�p�ɍ�����k�b�c��j��������C�莝���̂P�U�e�W�W�S���j���������
���ꂠ��A�ǂ������������ł����H
16F88�Ɋւ��Ă͋@��ύX�̂����@�������܂���B
16F�ōŋ���16F17XX�V���[�Y�͂ǂ��ł����H
PIC16F1769��PIC16F1778�ӂ�ł��B
(USB�ȊO��)�S�Ă��l�܂��Ă���̂ŁA����T���K�v�������Ȃ�܂��B
������̌��Ɋւ��Ă�16F1579�����肪�œK���Ǝv���Ă��܂��B
(16bit��PWM������̂�)
PICF88���̂́u�ŋ��v�������̂ł��傤���ǁA���ł́u�K�v�Œ���������Ă���}�C�R���v
�Ƃ��������ł��B
>�@TR����
���܂ł̃v���O���������ۂɉғ���������̂Ƃ��đ����Ă���悤�ł����ǁA
���Ƃ��Ắi�������������̂́j�A�ǂ���e�X�g(�m�F)�p�̃v���O�����ł��B
G�R�[�h�̂݁i���܂���MACH����Ƃ����O�t���܂��j�ł����X�s���h�������Ȃ��A�Ƃ����d�l�͂�����Ƃ��蓾�܂���B
SS�{�[�h��SEC�{�[�h������\��������܂����AMACH�̃T�|�[�g���i�v�ł͖����ł��傤�B
��Ə�ł�������Ǝ蓮�ʼn������͂���Ǝv���܂��B�X�s���h�����߂̏����Y����܂߂āB
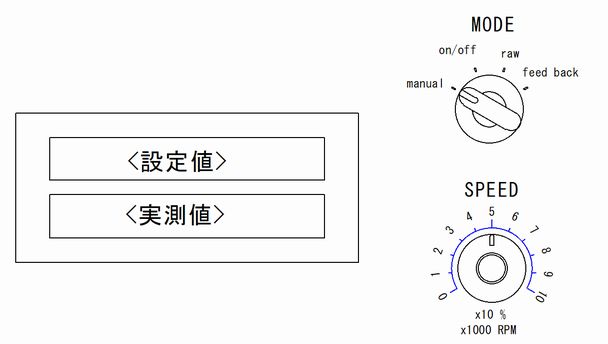
���ۂɂ́A�Y�t�}�̂悤�ȁH�C���^�[�t�F�C�X������āA�����Ǝ蓮���o����悤�ɂ������������ł��B
�Emanual:���S�蓮�B�{�����[���l�ʼn�
�Eon/off:���x�͎蓮�i�{�����[���l�j�����ǂ��AMACH�����PWM�̐M�����ăI��/�I�t�����s��
�Eraw�FMACH�����PWM�̊����ŁA���̂܂܃X�s���h���̊����Ƃ��đ���
�Efeed back:MACH����̑��x�ɂȂ�悤�ɁA�t�H�g���t���N�^����̎����l�ō��킹��B
�݂����Ȋ����̕���z�����Ă��܂��B
�ҋ����b�N 2019/06/16(Sun) 13:27 No.1680 Re: ��10 PWM
�ҋ����b�N����C�s�q����C�����́B
�����ꂠ��A�ǂ������������ł����H
�^�N�g�X�C�b�`�g���āC�A�b�v�_�E���̂ł����Ս쐬���Ă��̂ł����C
�P�W�s���̎莝���̃\�P�b�g���Ȃ�������ŁC
�Q�O�s���̃\�P�b�g�g�����̂��傫�ȊԈႢ�ł����B
�ڌ�������ӂ�Ȃ̂ŁC��̕��������đ}���悤�ɔz��
�����̂ł����C
�����̂����āC��l�߂ŁC�����āC�ꔭ�Ŕj���ł��B
�Ƃ���ŁC���낢�����Ă݂����ʂł��B
�`�c�T�Q�Q�O�̌��H�P�O�O���̂��̂ł����C
�v�����ʁC��X�O�����ł����B
���ꂩ��C�s�q����C�`�c�T�Q�Q�O�̉��L�̃v���O����
���̂悤�Ȓ������K�v�ł��B
void AD5220_up(void) {
ud = 1;
clk = 0;���P
clk = 1;���O
if (AD5220_val < 127)AD5220_val++;
}
//U/Ddown��
void AD5220_down(void) {
ud = 0;
clk = 0;���P
clk = 1;���O
if (AD5220_val > 0)AD5220_val--;
}
�`�c�T�Q�Q�O�̓_�E���̃N���b�N�œ���̂悤�ł��B
���������C���낢�뎎���Ă݂܂��B
�������������NjL�ł��B��������������
�@���C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
�@���ꂩ��C�o�h�b�@�`�c�T�Q�Q�O�̓d���̓�����ŁC
�@�R���g���[���ł��Ȃ��Ȃ�ꍇ������悤�ł��B
�@������ƌ����́H�ł��B
�����ꂠ��A�ǂ������������ł����H
�^�N�g�X�C�b�`�g���āC�A�b�v�_�E���̂ł����Ս쐬���Ă��̂ł����C
�P�W�s���̎莝���̃\�P�b�g���Ȃ�������ŁC
�Q�O�s���̃\�P�b�g�g�����̂��傫�ȊԈႢ�ł����B
�ڌ�������ӂ�Ȃ̂ŁC��̕��������đ}���悤�ɔz��
�����̂ł����C
�����̂����āC��l�߂ŁC�����āC�ꔭ�Ŕj���ł��B
�Ƃ���ŁC���낢�����Ă݂����ʂł��B
�`�c�T�Q�Q�O�̌��H�P�O�O���̂��̂ł����C
�v�����ʁC��X�O�����ł����B
���ꂩ��C�s�q����C�`�c�T�Q�Q�O�̉��L�̃v���O����
���̂悤�Ȓ������K�v�ł��B
void AD5220_up(void) {
ud = 1;
clk = 0;���P
clk = 1;���O
if (AD5220_val < 127)AD5220_val++;
}
//U/Ddown��
void AD5220_down(void) {
ud = 0;
clk = 0;���P
clk = 1;���O
if (AD5220_val > 0)AD5220_val--;
}
�`�c�T�Q�Q�O�̓_�E���̃N���b�N�œ���̂悤�ł��B
���������C���낢�뎎���Ă݂܂��B
�������������NjL�ł��B��������������
�@���C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
�@���ꂩ��C�o�h�b�@�`�c�T�Q�Q�O�̓d���̓�����ŁC
�@�R���g���[���ł��Ȃ��Ȃ�ꍇ������悤�ł��B
�@������ƌ����́H�ł��B
mabo 2019/06/16(Sun) 21:23 No.1681 Re: ��10 PWM
mabo����A���ӂ́B
�撣���Ă��܂��ˁ`�B
>���ꂩ��C�s�q����C�`�c�T�Q�Q�O�̉��L�̃v���O����
���̂悤�Ȓ������K�v�ł��B
void AD5220_up(void) {
ud = 1;
clk = 0;���P
clk = 1;���O
if (AD5220_val < 127)AD5220_val++;
}
//U/Ddown��
void AD5220_down(void) {
ud = 0;
clk = 0;���P
clk = 1;���O
if (AD5220_val > 0)AD5220_val--;
}
���́A���̓���ɌW��^���l�\�́Ax9c���AAD5220�������Ȃ�ł��ˁB
�����Ƃ��ẮAmabo����Ɠ����ӌ��ł������A�A�A�B
No1535��������킩��܂����A
mabo����Ɠ�����Ă����܂������A
No1536�ŋp������܂����B
����������������������܂��B
�����A������x9c������O�́A�ҋ����b�N����̃v���O�����ŁA
��R�l�́A�A�b�v�ƃ_�E�����܂����B
mabo����̈ӌ����������Ƃ���ƁA�ǂ���ł��\��Ȃ����ƂɂȂ��Ă��܂����ǁB
�ǂ��Ȃ낤�A
�ҋ����b�N���ANo1536�ŗ��R���q�ׂĂ��܂��̂Ō��ĉ������B
����ƁA���ʗ����̃v���O�����ł����A�����͏�������Ȃ�ł��I
�������ʂ���A�������ׂ��_������A���̌����܂߂āA������x��������ł��������B
���@���C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
�����ł����A������x9c��10���I�[���Ȃ�ł���ˁA�m���A�Q�P�O������
8.5�����ł����B
��������ƁA�����Ō�����A�قڈꏏ�Ȋ����ł��ˁI�I
��R�l�̌덷�ɂ��āAmabo����ɘb�����ł���BNo1587�ŏ������݂܂����B
�f�[�^�V�[�g�̂��̕\���I�I�@��
Rtotal :end to end resistance variation min20&�`max20%
���Ԃ�A����Ȃ���Ȃ�ł���A���łĂΓ����邩�ȁi���j
���̗L���ȁA�H�쎺���X�̋L���ɂ����l�ȏ������݂�����܂��B�@��
�u��R�l�����������B�T�����̕����w�����Ă��S�`�U�����ɂ���B���̂���͕����̎��ɂ͋C�ɂȂ�Ȃ��Ȃ�܂��B�v
http://iizukakuromaguro.sakura.ne.jp/216_digitalPOT/216_digitalPOT.html
���@���ꂩ��C�o�h�b�@�`�c�T�Q�Q�O�̓d���̓�����ŁC
�@�R���g���[���ł��Ȃ��Ȃ�ꍇ������悤�ł��B
x9c������ȂƂ��낪����܂����B
�����́Ax9c��A5220�́A�\������ʂ���2�ɕ�����Ă���Ǝv���܂��B
���܂������Ȃ����ǁA�v�Z���镔��ƁA�ϒ�R�����A
�d��������R�c�́A�v�Z����ɍŏ��ɓd��������ƁA����͖��Ȃ������Ǝv���܂��B
�����܂ŗ����̂ŁA�������C�ɂȂ����_��������_����܂��B
�d��ON�ŁA��u�A�傫�ȓd��������Ă��܂��܂����B
LED�Ŋm�F���Ă��܂����B����͎d�����Ȃ����ȁ`�B
������������������
�NjL
No1671��5220�^�]�v���O�����ł����A
�����̉��ǂ����v���O����������܂��B
�������Ă��Ȃ��̂ŁA�A�A�A���M�͂Ȃ��̂ł����A
�����̌������A�d���̓���鏇�Ԓʂ�ɂ���Ă��A
����s����Ȃ�A
���LjẴv���O���������b�����܂��B
�撣���Ă��܂��ˁ`�B
>���ꂩ��C�s�q����C�`�c�T�Q�Q�O�̉��L�̃v���O����
���̂悤�Ȓ������K�v�ł��B
void AD5220_up(void) {
ud = 1;
clk = 0;���P
clk = 1;���O
if (AD5220_val < 127)AD5220_val++;
}
//U/Ddown��
void AD5220_down(void) {
ud = 0;
clk = 0;���P
clk = 1;���O
if (AD5220_val > 0)AD5220_val--;
}
���́A���̓���ɌW��^���l�\�́Ax9c���AAD5220�������Ȃ�ł��ˁB
�����Ƃ��ẮAmabo����Ɠ����ӌ��ł������A�A�A�B
No1535��������킩��܂����A
mabo����Ɠ�����Ă����܂������A
No1536�ŋp������܂����B
����������������������܂��B
�����A������x9c������O�́A�ҋ����b�N����̃v���O�����ŁA
��R�l�́A�A�b�v�ƃ_�E�����܂����B
mabo����̈ӌ����������Ƃ���ƁA�ǂ���ł��\��Ȃ����ƂɂȂ��Ă��܂����ǁB
�ǂ��Ȃ낤�A
�ҋ����b�N���ANo1536�ŗ��R���q�ׂĂ��܂��̂Ō��ĉ������B
����ƁA���ʗ����̃v���O�����ł����A�����͏�������Ȃ�ł��I
�������ʂ���A�������ׂ��_������A���̌����܂߂āA������x��������ł��������B
���@���C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
�����ł����A������x9c��10���I�[���Ȃ�ł���ˁA�m���A�Q�P�O������
8.5�����ł����B
��������ƁA�����Ō�����A�قڈꏏ�Ȋ����ł��ˁI�I
��R�l�̌덷�ɂ��āAmabo����ɘb�����ł���BNo1587�ŏ������݂܂����B
�f�[�^�V�[�g�̂��̕\���I�I�@��
Rtotal :end to end resistance variation min20&�`max20%
���Ԃ�A����Ȃ���Ȃ�ł���A���łĂΓ����邩�ȁi���j
���̗L���ȁA�H�쎺���X�̋L���ɂ����l�ȏ������݂�����܂��B�@��
�u��R�l�����������B�T�����̕����w�����Ă��S�`�U�����ɂ���B���̂���͕����̎��ɂ͋C�ɂȂ�Ȃ��Ȃ�܂��B�v
http://iizukakuromaguro.sakura.ne.jp/216_digitalPOT/216_digitalPOT.html
���@���ꂩ��C�o�h�b�@�`�c�T�Q�Q�O�̓d���̓�����ŁC
�@�R���g���[���ł��Ȃ��Ȃ�ꍇ������悤�ł��B
x9c������ȂƂ��낪����܂����B
�����́Ax9c��A5220�́A�\������ʂ���2�ɕ�����Ă���Ǝv���܂��B
���܂������Ȃ����ǁA�v�Z���镔��ƁA�ϒ�R�����A
�d��������R�c�́A�v�Z����ɍŏ��ɓd��������ƁA����͖��Ȃ������Ǝv���܂��B
�����܂ŗ����̂ŁA�������C�ɂȂ����_��������_����܂��B
�d��ON�ŁA��u�A�傫�ȓd��������Ă��܂��܂����B
LED�Ŋm�F���Ă��܂����B����͎d�����Ȃ����ȁ`�B
������������������
�NjL
No1671��5220�^�]�v���O�����ł����A
�����̉��ǂ����v���O����������܂��B
�������Ă��Ȃ��̂ŁA�A�A�A���M�͂Ȃ��̂ł����A
�����̌������A�d���̓���鏇�Ԓʂ�ɂ���Ă��A
����s����Ȃ�A
���LjẴv���O���������b�����܂��B
TR 2019/06/16(Sun) 22:15 No.1682 ��9 PWM
mabo����
�䂪x9c�����āAad5220���܂����B
�`�c5220�̕����o��10ma
�g���Ղ����ȁB
�����A�v���O�����ύX��
�K�v�Ȏ��Ԃ�ǂݎ��܂��B
������܂����H
�䂪x9c�����āAad5220���܂����B
�`�c5220�̕����o��10ma
�g���Ղ����ȁB
�����A�v���O�����ύX��
�K�v�Ȏ��Ԃ�ǂݎ��܂��B
������܂����H
TR 2019/06/11(Tue) 16:34 No.1641
Re: ��9 PWM
 mabo����A���ӂ́A
mabo����A���ӂ́A�����Ď��炵�܂��B
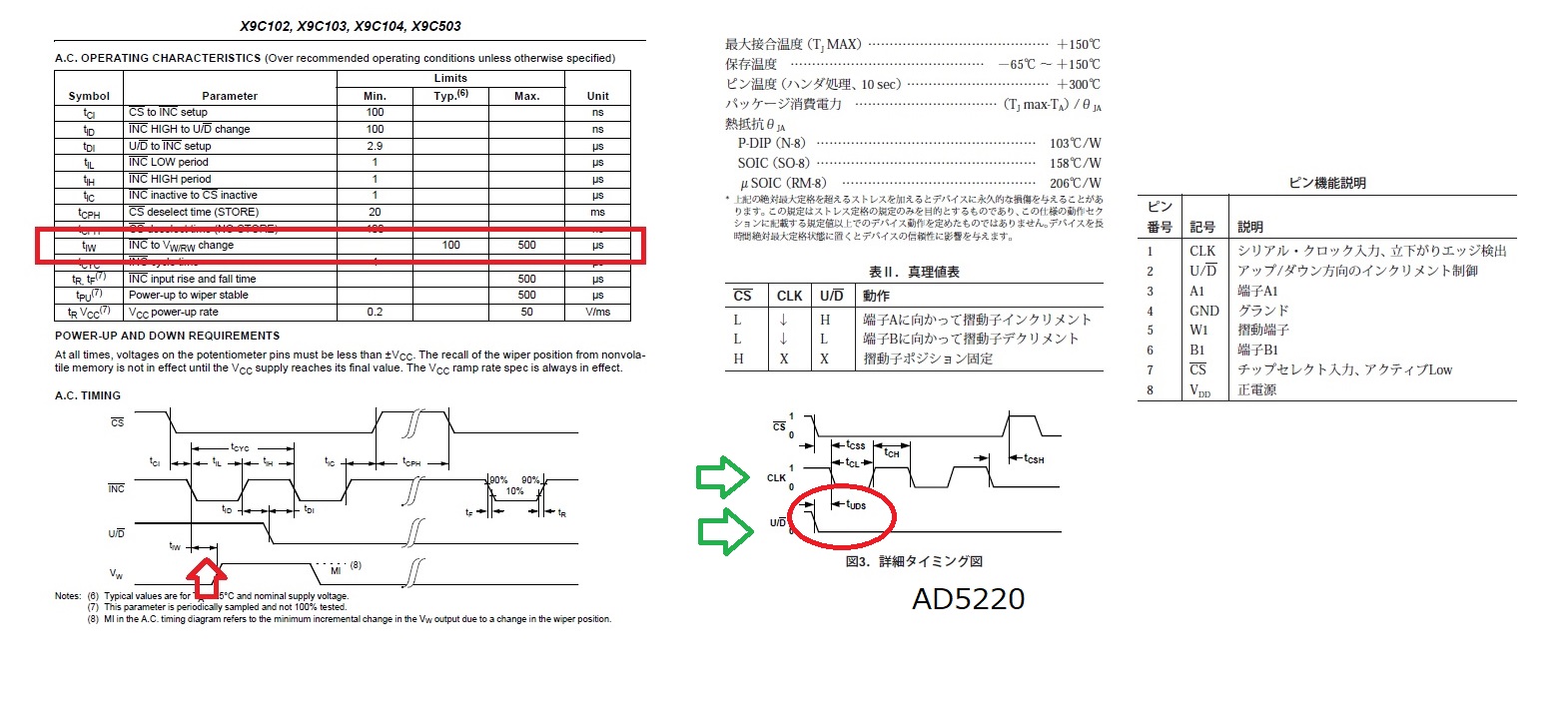
AD5220�p�̏����ݒ���ł����A
�Q�s�ڂ̃J�b�R���́A�f�[�^�V�[�g��TCL��25ns�ƂȂ�
�S�s�ڂ̃J�b�R���́A������Ȃ��A�A�B
�ʐ^�́A���y�[�W��x9c�ŁA�E�y�[�W��AD5220�ł��B
�����ݒ��
�P inc = 0;
�Q __delay_us(1);
�R�@inc = 1;
�S�@__delay_us(500);
TR 2019/06/11(Tue) 19:49 No.1642 Re: ��9 PWM
�s�q����C�ҋ����b�N����C���ӂ́B
�v���O�����̕ύX�ł����ǁC����ȂɎ��Ԃ͂�����Ȃ��悤�ȋC�����܂��B
�T�Q�Q�O�́C�A���C���P�Q�W�Əo�Ă��܂��̂ŁC
�@�@�P�O�O���P�Q�W
����ƁC
�@�@�t�^�c����������̂Q�T�ʂ���ɂb�k�r���P�O�ʂ�
�݂����Ȃ��ł��傤���B
inc = 0;
__delay_us(1);����____delay_us(20)
inc = 1;
__delay_us(500);������Ȃ�����
�ł��傤���B���C�p�[�̈ړ����Ԃɂ��ẮC
�L�ڂ��Ȃ��悤�ȋC�����܂��B
����ƕ�����Ȃ������ł����E�E�E�E�E�E�B
���ꂩ��C�w�X�b�j�����܂������B
�����́C�ߓd���H�Ód�C�H
���́C���ۂɁC�o�v�l�̃R���g���[���[�ɓ���Ă݂�����
�v���܂����C
�����C����ŁC�j������悤�Ȃ�C�l�k�S�Ŏg���������C����ł��傤�ˁB
���߂ɁC���̃f�W�^���|�e���V�����[�^�[���l�����Ƃ��C
�������߂�������̓�����܂������C
���߂Ȃ�C��R�A���C�ƃg�����W�X�^�Ƃo�h�b�ŁC
�w�X�b�Ɠ����悤�Ȕz��������C�P�O�K�̐�ւ����炢��������C
����ȂɎ�Ԃ����炸�ɁC�����邩�ȁC�Ǝv���܂����B
�w�X�b��C�T�Q�Q�O�����߂��āC���߂�������C���́C
�����̋����̂��߂ɁC��R�A���C�ƃg�����W�X�^�A���C�Ƃo�h�b�ŁC�����悤�Ȃ��̍���Ă݂悤�Ǝv���Ă܂��B
�o�h�b�i18�s���j�����G���R�[�_�[�����g�����W�X�^�A���C������R�A���C
�̑g�ݍ��킹�āC�R�Q���x�̃g�����W�X�^�R���g���[���ł��܂��̂ŁC
��R�O�i�K�̃R���g���[�����ł�����̂��\�̂悤�ȋC�����܂��B
�@
�v���O�����̕ύX�ł����ǁC����ȂɎ��Ԃ͂�����Ȃ��悤�ȋC�����܂��B
�T�Q�Q�O�́C�A���C���P�Q�W�Əo�Ă��܂��̂ŁC
�@�@�P�O�O���P�Q�W
����ƁC
�@�@�t�^�c����������̂Q�T�ʂ���ɂb�k�r���P�O�ʂ�
�݂����Ȃ��ł��傤���B
inc = 0;
__delay_us(1);����____delay_us(20)
inc = 1;
__delay_us(500);������Ȃ�����
�ł��傤���B���C�p�[�̈ړ����Ԃɂ��ẮC
�L�ڂ��Ȃ��悤�ȋC�����܂��B
����ƕ�����Ȃ������ł����E�E�E�E�E�E�B
���ꂩ��C�w�X�b�j�����܂������B
�����́C�ߓd���H�Ód�C�H
���́C���ۂɁC�o�v�l�̃R���g���[���[�ɓ���Ă݂�����
�v���܂����C
�����C����ŁC�j������悤�Ȃ�C�l�k�S�Ŏg���������C����ł��傤�ˁB
���߂ɁC���̃f�W�^���|�e���V�����[�^�[���l�����Ƃ��C
�������߂�������̓�����܂������C
���߂Ȃ�C��R�A���C�ƃg�����W�X�^�Ƃo�h�b�ŁC
�w�X�b�Ɠ����悤�Ȕz��������C�P�O�K�̐�ւ����炢��������C
����ȂɎ�Ԃ����炸�ɁC�����邩�ȁC�Ǝv���܂����B
�w�X�b��C�T�Q�Q�O�����߂��āC���߂�������C���́C
�����̋����̂��߂ɁC��R�A���C�ƃg�����W�X�^�A���C�Ƃo�h�b�ŁC�����悤�Ȃ��̍���Ă݂悤�Ǝv���Ă܂��B
�o�h�b�i18�s���j�����G���R�[�_�[�����g�����W�X�^�A���C������R�A���C
�̑g�ݍ��킹�āC�R�Q���x�̃g�����W�X�^�R���g���[���ł��܂��̂ŁC
��R�O�i�K�̃R���g���[�����ł�����̂��\�̂悤�ȋC�����܂��B
�@
mabo 2019/06/11(Tue) 22:46 No.1643 Re: ��9 PWM
AD5220��X9C�Ǝ��Ă���f�o�C�X�ł��B�Ⴂ��
�E100�|�W�V������128�|�W�V����
�E�|�W�V�����L���@�\�̗L��
�Emake before break�ƃ_�C�i�~�b�N����
�ƌ��������ł��ˁB
�������͓��ʂȃ��[�`���͕K�v����܂���B�O���ϐ���
volatile unsigned char AD5220_val=64;
�Ƃ��Ă����Ηǂ��ł��B
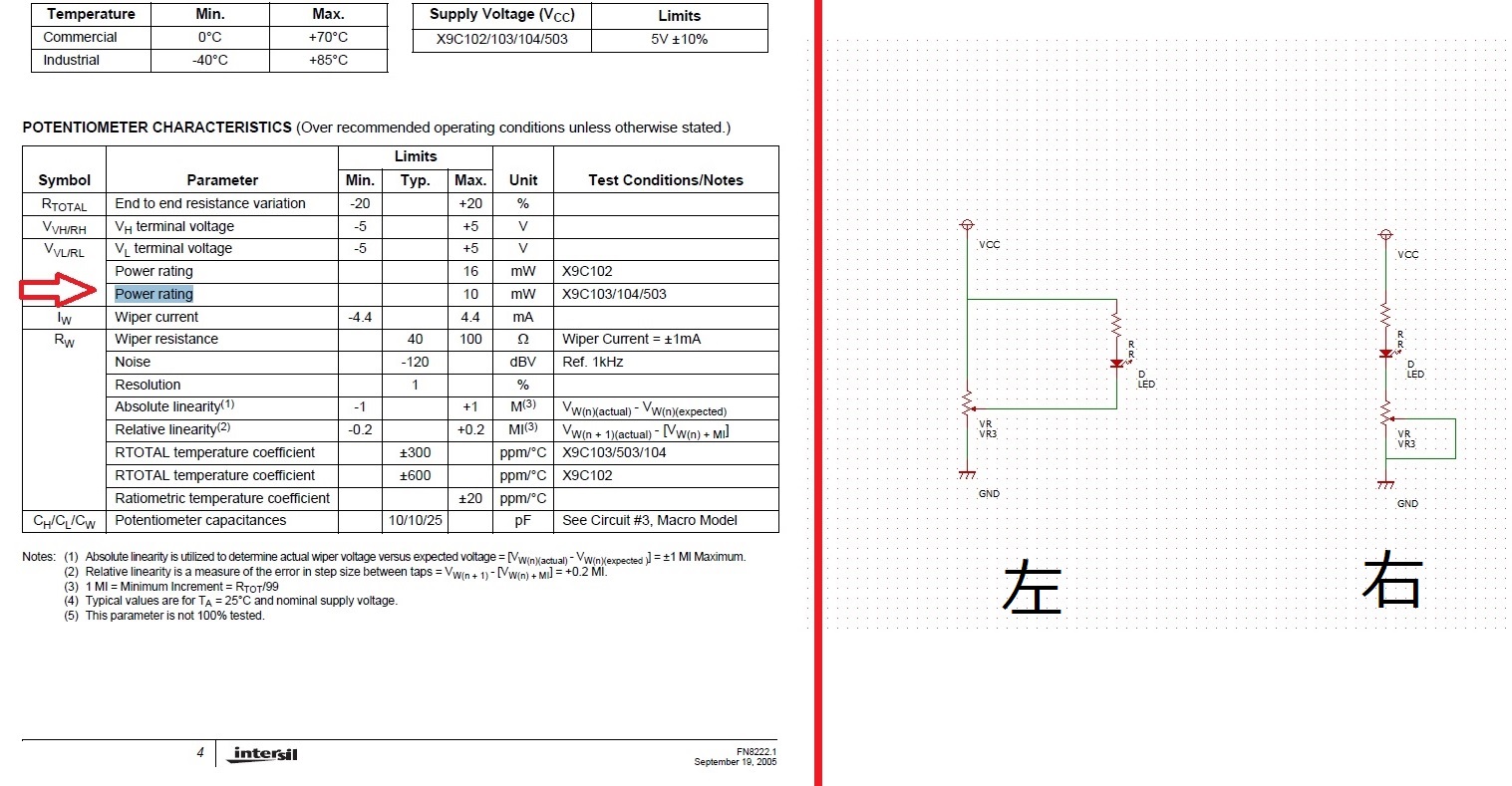
�����̎�̃f�o�C�X�͉ϒ�R�Ɠ����悤�ȓ�������܂����ǁA�ϒ�R�ł͖����̂Œ��ӂ��K�v�ł��B
�Ⴆ�A�ʏ�̈����ϒ�R�ł�1/8W��125mW�ł����ǁAX9C103��10mW�ł��B�d���𗬂���\�͂�1/10�ȉ��ł��B
�i�Ȃ̂ŁA���Ղ�LED�����q���Ȃ��ق��������ł��j
���R�Ȃ���A�u�������́A�����ȊO�ɂ��A�S�Ẵp�����[�^���p�X����K�v������܂��B
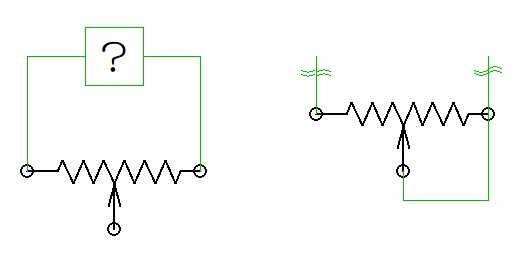
AD5220�̃f�[�^�V�[�g�́A8,9�y�[�W�ɂ���悤�ɁA�ϒ�R�ɂ�2�ʂ�̎g����������܂��B
�����Ō����A�ϒ�R�퓮��Ɠd���o�͓���ł��B
�ϒ�R�퓮��Ƃ́A�����������A�d����������ł��B���ۂɗ����d�������܂��B
�d���o�͓���Ƃ́A�d���Q�Ɠ���ł��B�d���l��ǂݍ��܂��邾���ŁA�قƂ�Ǔd�C�𗬂��܂���B
�X�s���h���̉ϒ�R�킪�d���Q�ƂƂ��Ďg���Ă���̂Ȃ�A�w�ǂ̃f�W�^���|�e���V���ł��̂܂ܒu�������\�ł��B
�d�������Ƃ��Ďg���Ă���̂Ȃ�A��������̑Ώ����K�v�ɂȂ邩������܂���B
�X�s���h���ɕt���Ă���ϒ�R�킪�ǂ̂悤�Ɏg���Ă���̂��́A�ʂɁA�X�s���h���̒��i�h���C�o�j������K�v�͂���܂���B
�����ƒ��ׂ�ǂ̂悤�Ɏg���Ă���̂��͔c���ł��܂��B
<�NjL���܂�>
��L�́APIC��AD5220�������ɓd������������A�Ƃ����̂��O��ł��B
PIC�݈̂�����AD5220�݂̂����Z�b�g�����ꍇ�͈ʒu�������\��������܂��B
����T�C�g��X9C�̃R�[�h�ɂł́A����A��ԉ��܂ʼn����Ă���ڕW�ʒu�܂ŏグ�Ă��܂����B
���̎��́A�n���Ȏ������Ă���l������Ȃ��A�ʂɂ����v���܂���ł������ǁA
�ǂ��炩���P�ƂŃ��Z�b�g��ԂɂȂ�\��������Ȃ�A�����������������K�v�Ȃ̂�������܂���B
�f�o�C�X�I�ɂ�PIC16F�N���X�̃}�C�R���Ȃ�A�����delay�͕K�v����܂���B
�����AUD�����߂āA�N���b�N�����邾���ł��B
�܂��A����̐}�ŕ�����悤�ɁA���C�p�[�̒x�������܂���B�_�C�i�~�b�N�ɐ�ւ��܂��B
�i���Rns�N���X�̒x��͂���ł��傤���ǁj
�E100�|�W�V������128�|�W�V����
�E�|�W�V�����L���@�\�̗L��
�Emake before break�ƃ_�C�i�~�b�N����
�ƌ��������ł��ˁB
�������͓��ʂȃ��[�`���͕K�v����܂���B�O���ϐ���
volatile unsigned char AD5220_val=64;
�Ƃ��Ă����Ηǂ��ł��B
�����̎�̃f�o�C�X�͉ϒ�R�Ɠ����悤�ȓ�������܂����ǁA�ϒ�R�ł͖����̂Œ��ӂ��K�v�ł��B
�Ⴆ�A�ʏ�̈����ϒ�R�ł�1/8W��125mW�ł����ǁAX9C103��10mW�ł��B�d���𗬂���\�͂�1/10�ȉ��ł��B
�i�Ȃ̂ŁA���Ղ�LED�����q���Ȃ��ق��������ł��j
���R�Ȃ���A�u�������́A�����ȊO�ɂ��A�S�Ẵp�����[�^���p�X����K�v������܂��B
AD5220�̃f�[�^�V�[�g�́A8,9�y�[�W�ɂ���悤�ɁA�ϒ�R�ɂ�2�ʂ�̎g����������܂��B
�����Ō����A�ϒ�R�퓮��Ɠd���o�͓���ł��B
�ϒ�R�퓮��Ƃ́A�����������A�d����������ł��B���ۂɗ����d�������܂��B
�d���o�͓���Ƃ́A�d���Q�Ɠ���ł��B�d���l��ǂݍ��܂��邾���ŁA�قƂ�Ǔd�C�𗬂��܂���B
�X�s���h���̉ϒ�R�킪�d���Q�ƂƂ��Ďg���Ă���̂Ȃ�A�w�ǂ̃f�W�^���|�e���V���ł��̂܂ܒu�������\�ł��B
�d�������Ƃ��Ďg���Ă���̂Ȃ�A��������̑Ώ����K�v�ɂȂ邩������܂���B
�X�s���h���ɕt���Ă���ϒ�R�킪�ǂ̂悤�Ɏg���Ă���̂��́A�ʂɁA�X�s���h���̒��i�h���C�o�j������K�v�͂���܂���B
�����ƒ��ׂ�ǂ̂悤�Ɏg���Ă���̂��͔c���ł��܂��B
<�NjL���܂�>
��L�́APIC��AD5220�������ɓd������������A�Ƃ����̂��O��ł��B
PIC�݈̂�����AD5220�݂̂����Z�b�g�����ꍇ�͈ʒu�������\��������܂��B
����T�C�g��X9C�̃R�[�h�ɂł́A����A��ԉ��܂ʼn����Ă���ڕW�ʒu�܂ŏグ�Ă��܂����B
���̎��́A�n���Ȏ������Ă���l������Ȃ��A�ʂɂ����v���܂���ł������ǁA
�ǂ��炩���P�ƂŃ��Z�b�g��ԂɂȂ�\��������Ȃ�A�����������������K�v�Ȃ̂�������܂���B
�f�o�C�X�I�ɂ�PIC16F�N���X�̃}�C�R���Ȃ�A�����delay�͕K�v����܂���B
�����AUD�����߂āA�N���b�N�����邾���ł��B
�܂��A����̐}�ŕ�����悤�ɁA���C�p�[�̒x�������܂���B�_�C�i�~�b�N�ɐ�ւ��܂��B
�i���Rns�N���X�̒x��͂���ł��傤���ǁj
�ҋ����b�N 2019/06/12(Wed) 02:33 No.1644 Re: ��9 PWM
�ҋ����b�N����C�s�q����C���͂悤�������܂��B
�ҋ����b�N����C�ڂ���������肪�Ƃ��������܂��B
�����Ȃ���C���ɂȂ�܂��B
�Ƃ���ŁC������Ă������������̂ł����C
�d���Q�ƂƓd�������̌��������ł����C
�{�����[�����O������ԂŁC�R�{�̐��̂Q�{��I��ŁC
��R���v���āC��R�O�ɂȂ�g�ݍ��킹��������̂́C
�d�������̕������l���Ă����̂ł��傤���B
�܂��C����Ȓ��ו����āC��H���ɁC���e���͂Ȃ��̂ł��傤���B
����ƁC�����C�d���Q�Ƃ̉�H�ł�����C�A�[�X�̐��ƁC
���C�p�[�̐����g���āC�O�����炩����d����ύX���邱�ƂŁC
�R���g���[���ł���̂ł��傤���B
�����́C���ꂩ��C���Ƃ̔��̑�����ł��B
�����C�ł��B
�ҋ����b�N����C�ڂ���������肪�Ƃ��������܂��B
�����Ȃ���C���ɂȂ�܂��B
�Ƃ���ŁC������Ă������������̂ł����C
�d���Q�ƂƓd�������̌��������ł����C
�{�����[�����O������ԂŁC�R�{�̐��̂Q�{��I��ŁC
��R���v���āC��R�O�ɂȂ�g�ݍ��킹��������̂́C
�d�������̕������l���Ă����̂ł��傤���B
�܂��C����Ȓ��ו����āC��H���ɁC���e���͂Ȃ��̂ł��傤���B
����ƁC�����C�d���Q�Ƃ̉�H�ł�����C�A�[�X�̐��ƁC
���C�p�[�̐����g���āC�O�����炩����d����ύX���邱�ƂŁC
�R���g���[���ł���̂ł��傤���B
�����́C���ꂩ��C���Ƃ̔��̑�����ł��B
�����C�ł��B
mabo 2019/06/12(Wed) 07:37 No.1645 Re: ��9 PWM
 mabo�����
mabo��������͂悤�������܂��B
AD5220�p�v���O�����̌��A���݂܂���ł����B
�����ꂩ��C�w�X�b�j�����܂������B
�����́C�ߓd���H�Ód�C�H
x9c�̂Ȃ������悭�m��܂���ł����B
�ŏ��́A�ʐ^�̉E�������̍��Ŏ������Ă�����A���삵�Ă��܂������A�ˑR�s���ƂȂ�܂����B
LED��x9c�����Ɍq���������ł��B
���̎g�����ŁA�̏�O�́ALED�P�T��A����Ă��܂����B
x9c��Power rating�@�̕\�L�́A10��A�Ƃ��Ȃ��Ă��܂����A����́Ax9c�ɗ�������d�����Ǝv����ł���ˁA
����ڑ��ŁA��������Ďg���Ă�����ԂŁAx9c�ɂǂ�قǓd��������Ă������́A
�������悤�ȑ���Ȃ������悤�ȁA�L���������܂��ł��B
�̏��́A�����ʐ^�E�����̉E�Ōq���ł��܂��B
�ϒ�R�Ƃ��Ă̋@�\�͂��߂ł����A���̖��邳�œ_���͂��Ă��܂��B
�܂蒲���������܂���B
�����́A�q���������������̂ł��傤���H
���o�h�b�i18�s���j�����G���R�[�_�[�����g�����W�X�^�A���C������R�A���C
�̑g�ݍ��킹�āC�R�Q���x�̃g�����W�X�^�R���g���[���ł��܂��̂ŁC
�������������@�������ł��ˁI�I
�悭�킩��܂��A�s�������ł���(^^��
TR 2019/06/12(Wed) 07:47 No.1646 Re: ��9 PWM
 �ҋ����b�N�����
�ҋ����b�N��������������͓��ʂȃ��[�`���͕K�v����܂���B�O���ϐ���
volatile unsigned char AD5220_val=64;
�Ƃ��Ă����Ηǂ��ł��B
���̉��߂ɂ��Ă��������܂��B
x9c�̏ꍇ�A���C�p����ʼn��ʂ܂Ń_�E���������ʒu���ux9c_val=0�v�Ƃ��āA�������̈ʒu�Ƃ��܂����B
�ŁAAD5220�̏ꍇ�́A
�P�ɁAvolatile unsigned char AD5220_val=64;
�Ƃ��Ă����Ηǂ��ł��B�@�Ƃ������Ƃ́A
�S�����ŁA����́A�ʒu���߂��Ă���킯�ł����ǁA
�U�S�̈ʒu���A�ĉ��ʂ̃X�^�[�g�ʒu�ł��邱�ƂɂȂ�̂ł��傤���H�H
�Ⴕ�A�����ł���A
UP/DOWN���̍l�������ς���̂ł��傤���H
���C�p�[���ЂƂÂA�グ��������̂ł͂Ȃ��A
�O�`�P�Q�W�|�W�V��������AD5220�ɓ��͂���̂ł��傤���H
�^���l�\�ɂ́A�R��ނ����Ȃ��I�I
����ƁA������_���肢���܂��B
���������ɂ���
__delay_us(500)�̈ʒu���Afor���[�v�̒��ɂ���܂����A
����ł́A����T�O�O�҂悤�ɂȂ�܂����A
�{���́Afor���[�v���I���Ă���A
�T�O�O��҂悤�ɂ���̂ł͂Ȃ��̂ł��傤���H
�T�O�O�҂̂́A������ς���ꍇ�ł͂Ȃ������ł��傤���H
INK�̂O�ƂP�����݂ɌJ��Ԃ����Ƃ́A
������ς��邱�Ƃł͂Ȃ��悤�Ɏv���܂����ǁB
�����A��R�l��ς��邽�߂ɁA�T�O�O�҂K�v������Ƃ����Ȃ�ʂł����B
//�f�o�C�X��������
void x9c_init(void) {
ud = 0;
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500);
}
x9c_val = 0;
}
�ύX��
void x9c_init(void) {
ud = 0;
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
}
x9c_val = 0;__delay_us(500);
}
TR 2019/06/12(Wed) 08:45 No.1647 Re: ��9 PWM
>MABO����
���ۂɓ������Č��Ȃ���Η����d���͔���܂���B
�d�����v���ł��Ȃ��@��Ȃ�A�{�����[���ʒu�ɑ���d���𐔓_�v������Δ���܂��B
> ��R���v���āC��R�O�ɂȂ�g�ݍ��킹��������̂́C
����͓T�^�I�ȓd�������̐ڑ��ł��傤�ˁB�ԈႢ�Ȃ��Ǝv���܂��B
�i�Ƃ͂����A���ʂ͖ڎ��Ł��P�[�u���łȂ����Ă���̂�������̂ŁA��R�l�ׂȂ��̂����ʂł����NJ��ł����ɒZ�����Ă���̂��ȁH�j
���̏ꍇ�͎��d�����ǂ̈ʗ����̂��ׂ�K�v������܂��B
> TR����
���̓��l�T�X�̃f�[�^�V�[�g�����Ă��܂����ǁA�قړ������Ǝv���܂��B
X9C�͍ő��Β�i�ŁA�}4.4mA�ł��B�����āA10�b�ȓ��Ȃ�8.8mA�����܂��B
�ʏ��2,3mA�ŗ}���Ă����ׂ��ł��B�����āA���̎��̌v���l�i�d���j�͂��܂�A����������܂���B
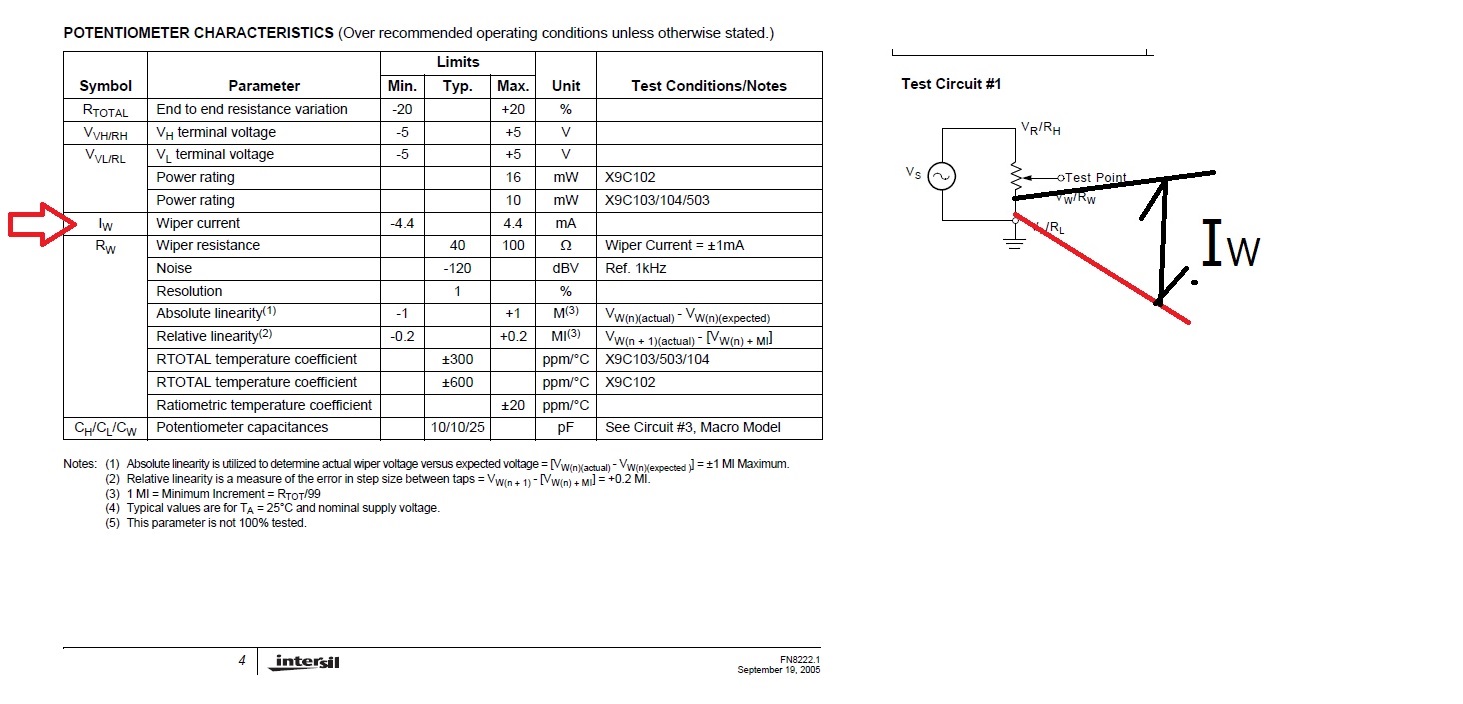
�ő��Β�i�̗���
POWER RATING
X9C103 X0C104, and X9C503 . . .10mW
�ƂȂ��Ă��܂��B����͂悭��R��ŁA1/2W�Ƃ�1/8W�Ƃ��Ă�ł�����̂ł��B�܂�1/100W�܂ŁA�Ƃ������ł��B
�����A�����̕\�ł��ˁB���l�T�X�̂��̂Ɠ����ł��BIw�����C�p�[�d�������[�q�̓d���ł��B
�Ȃ����͉E�̕����D�����Ȃ����ł͂���܂����ǁA�ǂ���ɂ��Ă��A�Œ��R��2k���ɂ���Ή��܂���B
> �S�����ŁA����́A�ʒu���߂��Ă���킯�ł����ǁA
> �U�S�̈ʒu���A�ĉ��ʂ̃X�^�[�g�ʒu�ł��邱�ƂɂȂ�̂ł��傤���H�H
�S�����Ȃ�Ăǂ��ɂ��o�Ă��܂���B�������Ă����v�����̂ł��傤�H
�u�ĉ��ʁv�́u�ĊJ�v��TYPO�ł��ˁH�����ł��B�قڐ^�ʒu�ŃX�^�[�g���܂��B
�g������X9C�ƑS�������ł��B�i�ʒu�L���@�\�͂���܂��ǁAX9C�ł����X�g���Ă��܂���j
> ���������ɂ���
�����X9C�̂��̂ł���B
�ŁA�������͓d���������Ă�1�u�̏o�����ł��B500us�ŁA100����Ƃ��Ă�0.06�b�ɖ����Ȃ����Ԃł��B
���̎��ԂɍS�邱�Ǝ��̃i���Z���X�ł��B
> �{���́Afor���[�v���I���Ă���A
> �T�O�O��҂悤�ɂ���̂ł͂Ȃ��̂ł��傤���H
> �T�O�O�҂̂́A������ς���ꍇ�ł͂Ȃ������ł��傤���H
�������A�d���������Ă���̂Ȃ�A�����̏����ł��B�������ł��Awhile���[�v�ł��A�������͓̂������Ƃł��B
���ƁA���̕ύX��̃v���O�����ł͑ʖڂł��B
�K�Ȏ��Ԃ�����Ă��܂���B
���ۂɓ������Č��Ȃ���Η����d���͔���܂���B
�d�����v���ł��Ȃ��@��Ȃ�A�{�����[���ʒu�ɑ���d���𐔓_�v������Δ���܂��B
> ��R���v���āC��R�O�ɂȂ�g�ݍ��킹��������̂́C
����͓T�^�I�ȓd�������̐ڑ��ł��傤�ˁB�ԈႢ�Ȃ��Ǝv���܂��B
�i�Ƃ͂����A���ʂ͖ڎ��Ł��P�[�u���łȂ����Ă���̂�������̂ŁA��R�l�ׂȂ��̂����ʂł����NJ��ł����ɒZ�����Ă���̂��ȁH�j
���̏ꍇ�͎��d�����ǂ̈ʗ����̂��ׂ�K�v������܂��B
> TR����
���̓��l�T�X�̃f�[�^�V�[�g�����Ă��܂����ǁA�قړ������Ǝv���܂��B
X9C�͍ő��Β�i�ŁA�}4.4mA�ł��B�����āA10�b�ȓ��Ȃ�8.8mA�����܂��B
�ʏ��2,3mA�ŗ}���Ă����ׂ��ł��B�����āA���̎��̌v���l�i�d���j�͂��܂�A����������܂���B
�ő��Β�i�̗���
POWER RATING
X9C103 X0C104, and X9C503 . . .10mW
�ƂȂ��Ă��܂��B����͂悭��R��ŁA1/2W�Ƃ�1/8W�Ƃ��Ă�ł�����̂ł��B�܂�1/100W�܂ŁA�Ƃ������ł��B
�����A�����̕\�ł��ˁB���l�T�X�̂��̂Ɠ����ł��BIw�����C�p�[�d�������[�q�̓d���ł��B
�Ȃ����͉E�̕����D�����Ȃ����ł͂���܂����ǁA�ǂ���ɂ��Ă��A�Œ��R��2k���ɂ���Ή��܂���B
> �S�����ŁA����́A�ʒu���߂��Ă���킯�ł����ǁA
> �U�S�̈ʒu���A�ĉ��ʂ̃X�^�[�g�ʒu�ł��邱�ƂɂȂ�̂ł��傤���H�H
�S�����Ȃ�Ăǂ��ɂ��o�Ă��܂���B�������Ă����v�����̂ł��傤�H
�u�ĉ��ʁv�́u�ĊJ�v��TYPO�ł��ˁH�����ł��B�قڐ^�ʒu�ŃX�^�[�g���܂��B
�g������X9C�ƑS�������ł��B�i�ʒu�L���@�\�͂���܂��ǁAX9C�ł����X�g���Ă��܂���j
> ���������ɂ���
�����X9C�̂��̂ł���B
�ŁA�������͓d���������Ă�1�u�̏o�����ł��B500us�ŁA100����Ƃ��Ă�0.06�b�ɖ����Ȃ����Ԃł��B
���̎��ԂɍS�邱�Ǝ��̃i���Z���X�ł��B
> �{���́Afor���[�v���I���Ă���A
> �T�O�O��҂悤�ɂ���̂ł͂Ȃ��̂ł��傤���H
> �T�O�O�҂̂́A������ς���ꍇ�ł͂Ȃ������ł��傤���H
�������A�d���������Ă���̂Ȃ�A�����̏����ł��B�������ł��Awhile���[�v�ł��A�������͓̂������Ƃł��B
���ƁA���̕ύX��̃v���O�����ł͑ʖڂł��B
�K�Ȏ��Ԃ�����Ă��܂���B
�ҋ����b�N 2019/06/12(Wed) 12:43 No.1648 Re: ��9 PWM
 �ҋ����b�N�����
�ҋ����b�N�������X9C�͍ő��Β�i�ŁA�}4.4mA�ł��B�����āA10�b�ȓ��Ȃ�8.8mA�����܂��B
���̂��Ƃ́A�ʐ^�̐Ԗ��̎��ł����H
�����āA�����ʐ^�E���̋�Ԃɗ����d���l�ł����H
�������ł��B�قڐ^�ʒu�ŃX�^�[�g���܂��B
�g������X9C�ƑS�������ł��B�i�ʒu�L���@�\�͂���܂��ǁAX9C�ł����X�g���Ă��܂���j
MD5220�́A�d��ON�ŁA�O�`�P�Q�W�|�W�V�����̂U�S�ɗ���Ƃ������Ƃł����A
�Ƃ������Ƃ́A�X�^�[�g�ʒu���O�i�O���j�Ƃ������ꍇ�́A
�O���ϐ���
volatile unsigned char AD5220_val=�O;
��L�̗l�Ƀ|�W�V�������O�Ƃ���A0���ƂȂ�̂ł��傤���H
�Ⴕ�A�����ł���AU/P����Awhile (1) �����́A�ȉ��̗l�ɂ���Ηǂ��̂ł��傤���H
//U/D_up��
void MD5220_up(void) {
cs=0; ud = 1;
clk = 0;
__delay_us(1);
clk = 1;
if (MD5520_val < 127)MD5220_val++;
//���̏グ������500us��
}
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv();// �A�i���O�l�̕ϊ��ƓǍ��ݏ������Ăяo���Ɣz��ɂ�镽����
for (char i = 0; i < 32; i++)target += adc[i];
target /=327.4;
if ((target) > xMD5220_val)MD5220_up();
else if ((target) < AD5220_val)MD5220_dowm();//U/Ddown���Ăяo��
__delay_ms(1);
}
TR 2019/06/12(Wed) 14:41 No.1649 Re: ��9 PWM
���C�p�[�͉����̖��ł��B�܂�ATEST POINT�Ə����Ă��镔���𗬂���d���ł��B�d���l�Ȃ�Vw�A��R�l�Ȃ�Rw�A�d���l�Ȃ�Iw�ł��B
> void AD5220_up(void) {
> cs=0; ud = 1;
> clk = 0;
> __delay_us(1);
> clk = 1;
> if (AD5520_val < 127)AD5220_val++;
> //���̏グ������500us��
> }
AD5220�͑����ɔ��f����̂�delay�͗v��܂���B�Ȃ̂ŁA
void AD5220_up(void) {
ud = 1;
clk = 0;
clk = 1;
if (AD5520_val < 127)AD5220_val++;
}
�ł��B
�ŁA0�Ɉړ�������ɂ͏������͐F�X����܂����ǁA
while(AD5220__val>0)AD5220_down();
�ł��B�ܘ_�A��Ɠ����l�ɁAAD5220_down�������K�v������܂��B
���ʊ�������Ă��ǂ��ł��B�Ⴆ��
void AD5220(unsigned char pos){
int t=pos-AD5220_val;
if(t>0)ud=1;
else {
ud=0;
t=-t;
}
while(t){
clk=0;
clk=1;
t--;
}
}
�݂����ɁA���ڈʒu���w�肷����ł��BAD5220(0);�ŁA0�ʒu�ֈړ����܂��B
���ƁA���̃f�o�C�X��7�r�b�g�Ȃ̂ŁA
�~�@target /=327.4;
���@target=target>>8;
�ł��B
> void AD5220_up(void) {
> cs=0; ud = 1;
> clk = 0;
> __delay_us(1);
> clk = 1;
> if (AD5520_val < 127)AD5220_val++;
> //���̏グ������500us��
> }
AD5220�͑����ɔ��f����̂�delay�͗v��܂���B�Ȃ̂ŁA
void AD5220_up(void) {
ud = 1;
clk = 0;
clk = 1;
if (AD5520_val < 127)AD5220_val++;
}
�ł��B
�ŁA0�Ɉړ�������ɂ͏������͐F�X����܂����ǁA
while(AD5220__val>0)AD5220_down();
�ł��B�ܘ_�A��Ɠ����l�ɁAAD5220_down�������K�v������܂��B
���ʊ�������Ă��ǂ��ł��B�Ⴆ��
void AD5220(unsigned char pos){
int t=pos-AD5220_val;
if(t>0)ud=1;
else {
ud=0;
t=-t;
}
while(t){
clk=0;
clk=1;
t--;
}
}
�݂����ɁA���ڈʒu���w�肷����ł��BAD5220(0);�ŁA0�ʒu�ֈړ����܂��B
���ƁA���̃f�o�C�X��7�r�b�g�Ȃ̂ŁA
�~�@target /=327.4;
���@target=target>>8;
�ł��B
�ҋ����b�N 2019/06/12(Wed) 15:40 No.1650 Re: ��9 PWM
 �ҋ����b�N����ցA
�ҋ����b�N����ցA�V����x9c��������e�X�g���������Ǝv���܂��B
�e�X�g���@�ł����A�ҋ����b�N����̌���ꂽ���@�́A�ʐ^�̒ʂ�ł�낵���ł��傤���H
��������������������������������
MD5220
MD5220�p�ł����A�ꉞ�A���L�̒ʂ�������r���g�܂ł�OK�ł����A
�@���ł��傤���H
���Ă���ĉ������B
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ
#define clk LATA1
#define ud LATA0
// �v���g�^�C�v�錾
unsigned int adconv(void); //ADC�ǂݍ��݊�
//�O���ϐ�
volatile unsigned char MD5220_val = 64; //�d��ON�����C�p���Ԉʒu
//�f�o�C�X��������
void MD5220(unsigned char pos) {
int t = pos - MD5220_val;
if (t > 0)ud = 1;
else {
ud = 0;
t = -t;
}
while (t) {
clk = 0;
clk = 1;
t--;
}
}
//U/D_up��
void MD5220_up(void) {
ud = 1;
clk = 0;
clk = 1;
if (MD5220_val < 127)MD5220_val++;
}
//U/Ddown��
void MD5220_dowm(void) {
ud = 0;
clk = 0;
clk = 1;
if (MD5220_val > 0)MD5220_val--;
}
//���C����
void main() {
OPTION_REGbits.nWPUEN = 0; //�����v���A�b�v�L��
OSCCON =
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // SEC���~���[�p�X�o�R�ŃA�i���O���M����RB3��IN
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 ADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(RB3����Ǎ���)
ADCON1 = 0b11010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/16�AVDD�����t�@�����X�Ƃ���
MD5220(0); //������
while (1) {
static unsigned int adc[32] = {0};
static char num = 0;
unsigned int target = 0;
adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ��ƓǍ��ݏ������Ăяo���Ɣz��ɂ��AD�ϊ��l����
for (char i = 0; i < 32; i++)target += adc[i];
target = target >> 8;
if (target > MD5220_val) {
MD5220_up();
} else if (target < MD5220_val) {
MD5220_dowm();//U/Ddown���Ăяo��
}
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
TR 2019/06/12(Wed) 17:02 No.1651 Re: ��9 PWM
 ���ς�炸dowm�ɂȂ��Ă��܂��Bdown�ł��B
���ς�炸dowm�ɂȂ��Ă��܂��Bdown�ł��B�v���O�����I�ɂ͂������ȏ��͌�����܂���ł����B
���̐}�̓f�W�^���|�e���V���Ƃ��āAx9c�̃e�X�g�ł����H
�ł�����A���̏�ԂŁA�u�d���l�v��ǂ�ł��������B
�ܘ_�A����ȊO�̐F�X�ȕ����̒�R�l��d���l���v�����Ă�����ėǂ���ł���B
�����A�d�v�Ȃ̂͂��̏�ԂŁA�ォ�牺�܂œd�����������ǂ����H�ł��B
���f�[�^�V�[�g����A���C�p�[�̒�R�l��210���͂��蓾�܂���
�@���܂ł̌��ʂ̓��C�p�[�ʒu����������Ă��Ȃ����A����~�X�ǂ��炩���Ǝv���Ă��܂��B
�@
�v���O������
while(1){
�̌��ύX���āA
while(1){
for(char i=0;i<=100;i++){
x9c_up();
__delay_us(500);
}
__delay_ms(5000);
for(char i=0;i<=100;i++){
x9c_down();
__delay_us(500);
}
__delay_ms(5000);
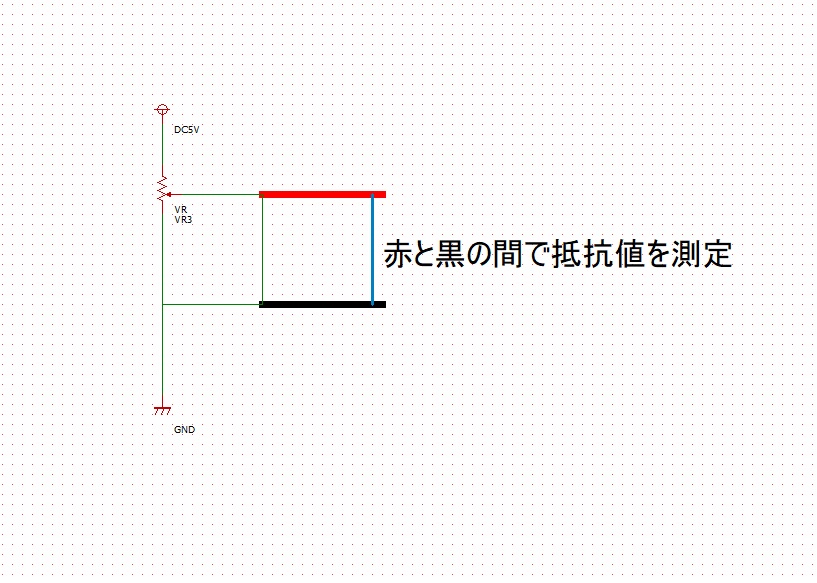
}
�ɕς���GND-Vw�Ԃ��v�����ĉ������B0�`5V�܂ŕω����锤�ł��B
�������5�b�Ԋu�Ń��C�p�[�ʒu���ŏ�ʁ̍ʼn��ʂɐ�ւ��Ă��܂��B���͗p�̃{�����[���͎g���܂���B
�K���AIC�̒�R���̐�͉����ڑ����Ȃ��Ōv�����ĉ������B�A
�ҋ����b�N 2019/06/12(Wed) 17:57 No.1652 Re: ��9 PWM
�ҋ����b�N�����
MD5220�p�v���O�����L��������܂��B
����Ē����܂����A���L�v���O�����́A���X���̃e�X�g�p�ł���ˁH
�v���O�����ύX���@
while(1){�@�̒�����������Ɠ���ւ��āA���̃v���O�����͕ύX�Ȃ��ł�낵���ł����H
�@�@�@�L
�v���O������
while(1){
�̌��ύX���āA
while(1){
for(char i=0;i<=100;i++){
x9c_up();
__delay_us(500);
}
__delay_ms(5000);
for(char i=0;i<=100;i++){
x9c_down();
__delay_us(500);
}
__delay_ms(5000);
}
�NjL
x9c��UP���ɂ���
up���́A���L�̒ʂ�ƂȂ��Ă��܂����
�ŁA
if (x9c_val < 100)x9c_val++;�@���̕����́A1�|�W�V�����ÂA��R�l���グ�Ă����킯�ł���ˁA
�ł���A
��R�l�ύX�ɕK�v�Ȏ��ԁA�P�O�O�`�T�O�O�ʂ��̎��Ԋ�������̂ł́H
�@�@�@�L
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
//���̏グ������500us��
}
�ύX��
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
�@�@__delay_us(100);
//���̏グ������500us��
}
MD5220�p�v���O�����L��������܂��B
����Ē����܂����A���L�v���O�����́A���X���̃e�X�g�p�ł���ˁH
�v���O�����ύX���@
while(1){�@�̒�����������Ɠ���ւ��āA���̃v���O�����͕ύX�Ȃ��ł�낵���ł����H
�@�@�@�L
�v���O������
while(1){
�̌��ύX���āA
while(1){
for(char i=0;i<=100;i++){
x9c_up();
__delay_us(500);
}
__delay_ms(5000);
for(char i=0;i<=100;i++){
x9c_down();
__delay_us(500);
}
__delay_ms(5000);
}
�NjL
x9c��UP���ɂ���
up���́A���L�̒ʂ�ƂȂ��Ă��܂����
�ŁA
if (x9c_val < 100)x9c_val++;�@���̕����́A1�|�W�V�����ÂA��R�l���グ�Ă����킯�ł���ˁA
�ł���A
��R�l�ύX�ɕK�v�Ȏ��ԁA�P�O�O�`�T�O�O�ʂ��̎��Ԋ�������̂ł́H
�@�@�@�L
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
//���̏グ������500us��
}
�ύX��
//U/D_up��
void x9c_up(void) {
ud = 1;
inc = 0;
__delay_us(1);
inc = 1;
if (x9c_val < 100)x9c_val++;
�@�@__delay_us(100);
//���̏グ������500us��
}
TR 2019/06/12(Wed) 18:15 No.1653 Re: ��9 PWM
�����ł��BX9C�p�̃v���O�����ł��B
> ��R�l�ύX�ɕK�v�Ȏ��ԁA�P�O�O�`�T�O�O�ʂ��̎��Ԋ�������̂ł́H
�ق��10�s������Ƃ̃v���O�����ł��B
���̒���
__delay_us(500);
��2��������Ă���̂ɉ��ł��ꂪ�ڂɓ���Ȃ��̂��s�v�c�ł��B
���ɏ����Ă���܂��B
�NjL�ł��B
��ƂȂ�����������悤�ł��B
����x9c_up���̎��ł��ˁB
�t����Ζ��ʂȎ��Ԃł��B
���̊Ԃ�ADC�̎擾��v�Z�Aetc������A���R�Ɍo�߂��邾�낤�A�Ƃ����l���ĕt���Ă��܂���B
ADC�̊Ԋu��D�悳����l���ł��B
�����ŕt���Ă��܂��ƁAADC�̊Ԋu���܂�ɂȂ��Ă��܂��܂��B
> ��R�l�ύX�ɕK�v�Ȏ��ԁA�P�O�O�`�T�O�O�ʂ��̎��Ԋ�������̂ł́H
�ق��10�s������Ƃ̃v���O�����ł��B
���̒���
__delay_us(500);
��2��������Ă���̂ɉ��ł��ꂪ�ڂɓ���Ȃ��̂��s�v�c�ł��B
���ɏ����Ă���܂��B
�NjL�ł��B
��ƂȂ�����������悤�ł��B
����x9c_up���̎��ł��ˁB
�t����Ζ��ʂȎ��Ԃł��B
���̊Ԃ�ADC�̎擾��v�Z�Aetc������A���R�Ɍo�߂��邾�낤�A�Ƃ����l���ĕt���Ă��܂���B
ADC�̊Ԋu��D�悳����l���ł��B
�����ŕt���Ă��܂��ƁAADC�̊Ԋu���܂�ɂȂ��Ă��܂��܂��B
�ҋ����b�N 2019/06/12(Wed) 22:54 No.1654 Re: ��9 PWM
�ҋ����b�N���͂悤�������܂��B
��ADC�̊Ԋu��D�悳����l���ł��B
�����ŕt���Ă��܂��ƁAADC�̊Ԋu���܂�ɂȂ��Ă��܂��܂��B
�F�X�Ƃ��������Ă悩�����ł��B
�L��������܂��B
�V�߂ă��[�p�X�t�B���^�[���l���Ă݂悤���Ǝv���܂����B
ML4�ɂ��Ă���ϒ�R�Ȃ�ł����AML4�ɂ�����ԂŁA��R�l���v��������A�P�����ł����B
MD�T�Q�Q�O�̕������\���ǂ��̂ŁAMD�T�Q�Q�O�ɂ������������A�P�������Ȃ��悤�ł��B
�܂���܂����`�B
��ADC�̊Ԋu��D�悳����l���ł��B
�����ŕt���Ă��܂��ƁAADC�̊Ԋu���܂�ɂȂ��Ă��܂��܂��B
�F�X�Ƃ��������Ă悩�����ł��B
�L��������܂��B
�V�߂ă��[�p�X�t�B���^�[���l���Ă݂悤���Ǝv���܂����B
ML4�ɂ��Ă���ϒ�R�Ȃ�ł����AML4�ɂ�����ԂŁA��R�l���v��������A�P�����ł����B
MD�T�Q�Q�O�̕������\���ǂ��̂ŁAMD�T�Q�Q�O�ɂ������������A�P�������Ȃ��悤�ł��B
�܂���܂����`�B
TR 2019/06/13(Thu) 07:02 No.1655 Re: ��9 PWM
 �ϒ�R�̒�R�l�́A�܂��́A�L�ڂ����������m�F���ĉ������B
�ϒ�R�̒�R�l�́A�܂��́A�L�ڂ����������m�F���ĉ������B�����̂��̂�103B�̂悤�ȕ\��������Ǝv���܂��B
�܂��A�ǂ̃N���X�i��W���m�j�̂��̂��g���Ă���̂��A�Ƃ����Q�l�ɂȂ�܂��B
�����L�ڂ��Ȃ���ΊO���Čv���ł��B
����͓Y�t�}���̂悤�ɁA�ڑ�����Ă��鉽���Ƃ̍�����R�ɂȂ邩��ł��B
���̉����̒�R�l�����|�I�ɍ����ꍇ�̂݁A���m�Ȓ�R�l������܂��B
�܂��A�Y�t�}�E�̂悤�ɔz������Ă���ꍇ�������ł��B(MABO��������̔z���̂悤�ł��j
���̏ꍇ�͍��̌Œ�[�q������[�q�̒�R�l���v�����Ă��鎖�ɂȂ�܂��B
�i�X�ɕ����H�ɂȂ��Ă��܂��j
�ҋ����b�N 2019/06/13(Thu) 09:42 No.1656 Re: ��9 PWM
MD5220�p�v���O�����ł����A�����������������Ǝv���܂����B�ǂ����낤��
TR 2019/06/13(Thu) 11:24 No.1657 Re: ��9 PWM
> MD5220�p�v���O�����ł����A�����������������Ǝv���܂����B
�ǂ̓_���݂āA�����v���̂ł��傤���H�@No.1651�ł���ˁH
�������S�ł͖����A�Ǝv���Ă͂��܂����ǁA�u���������v�Ǝv���̂Ȃ�A���̍l���Ă��镔���ł͖����悤�ȋC�����܂��B
�ǂ̓_���݂āA�����v���̂ł��傤���H�@No.1651�ł���ˁH
�������S�ł͖����A�Ǝv���Ă͂��܂����ǁA�u���������v�Ǝv���̂Ȃ�A���̍l���Ă��镔���ł͖����悤�ȋC�����܂��B
�ҋ����b�N 2019/06/13(Thu) 14:21 No.1658 Re: ��9 PWM
MD5220�̏��������ł����A�Ō��}�̑O�ɁAMD5220_val=0;
�������Ă���Ǝv���܂��B
�@�����A�d��ON�Ƌ��ɁA��R�l�|�W�V������64�ɂȂ�Ƃ������������ł��B
�������Ă���Ǝv���܂��B
�@�����A�d��ON�Ƌ��ɁA��R�l�|�W�V������64�ɂȂ�Ƃ������������ł��B
TR 2019/06/13(Thu) 14:46 No.1659 Re: ��9 PWM
�����A���̒ʂ�ł��ˁB
�ŁAMD5220���̍Ō�̍s��
MD5220_val=pos;
�̈�s�����Ă����ĉ������B
���w�肵���ʒu�Ɉړ�������ɁA���̈ʒu�i�ϐ��j���ύX���Ă���
�ŁAMD5220���̍Ō�̍s��
MD5220_val=pos;
�̈�s�����Ă����ĉ������B
���w�肵���ʒu�Ɉړ�������ɁA���̈ʒu�i�ϐ��j���ύX���Ă���
�ҋ����b�N 2019/06/13(Thu) 15:10 No.1660 Re: ��9 PWM
pos�ɂ��āA�l�b�g�������܂������A������܂���ł����B��������܂����B
�܂��A�����O�ŁA�傫�Ȏ��͌����܂���B���e�͊肢�܂��B
No1652��x9c�e�X�g�p�v���O����(���L�ꕔ�����A�C�ɂȂ�_�̂�)�́A�������Ă��܂��A
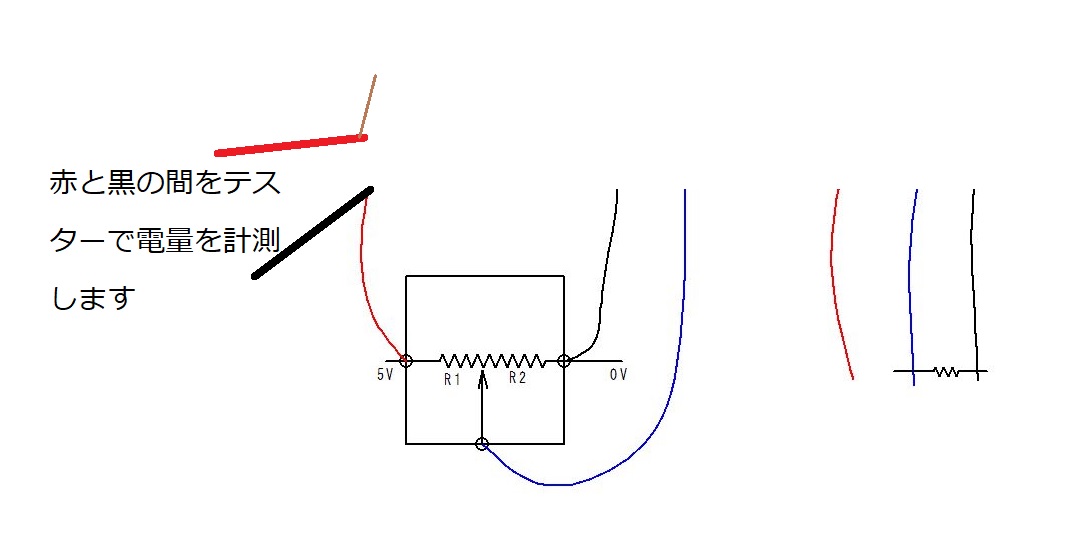
>�ɕς���GND-Vw�Ԃ��v�����ĉ������B0�`5V�܂ŕω����锤�ł��B
�����ł��B
�����A�^�]�p��x9c�p�v���O�����́A
__delay_us(500);
�������_���C�ɂȂ�܂��B
��R�l�ύX�ɗv���鎞�Ԃ��L��̂Ɩ����̂ł́A�����ł�Ɛ������܂��B
�@�@�@�L
x9c_down();
__delay_us(500);
}
�܂��A�����O�ŁA�傫�Ȏ��͌����܂���B���e�͊肢�܂��B
No1652��x9c�e�X�g�p�v���O����(���L�ꕔ�����A�C�ɂȂ�_�̂�)�́A�������Ă��܂��A
>�ɕς���GND-Vw�Ԃ��v�����ĉ������B0�`5V�܂ŕω����锤�ł��B
�����ł��B
�����A�^�]�p��x9c�p�v���O�����́A
__delay_us(500);
�������_���C�ɂȂ�܂��B
��R�l�ύX�ɗv���鎞�Ԃ��L��̂Ɩ����̂ł́A�����ł�Ɛ������܂��B
�@�@�@�L
x9c_down();
__delay_us(500);
}
TR 2019/06/13(Thu) 15:46 No.1661 Re: ���W�[�o�v�l
 mabo����ꂳ�܁A
mabo����ꂳ�܁A�F�����́B
�}�b�n�́A[CLOSED LOOP]�̐ݒ���@�������Ă��������B
�����̃X�s���h�����[�^�[�ɂ́A�G���R�[�_�[�̂悤�Ȃ��̂�����܂���B
����ł��A[CLOSED LOOP]�Ƀ`�F�b�N����ꂽ��AP I D�ɉ�������̐��l������̂ł��傤���H
���Љ���������y�[�W�A������ł��ˁB
https://ja.wikipedia.org/wiki/PID����
�f�t�H���g�ł����l�������Ă��܂������A��͂�M��Ȃ����Ⴂ���Ȃ��̂ł��傤���H�H
�ǂ�ł݂܂����A�킩��Ȃ�������A�ēx���e���܂��̂ŁA���̐߂͋X�������肢���܂��B
������������������������������������������
�ҋ����b�N�����
�v���O�����̌��A�������܂����B
����ƁA
No�P�U�P�V�̂��ʐ^���݂܂���B
�������܂����B
���Ɏʐ^�̉ϒ�R���������ꂽ�����̏�ԂŒ�R�𑪂��Ă���܂��B
�Ȃ�ƁA�ő�łP���ł����B�@�O���āA������x��R�l���m�F���܂��B
�܂��A������ԂŁA�ʐ^�ӏ��̓d�����}��܂��B
�ŁA�Ȃ�ł����A
�ʐ^�E�̃e�X�g�ł����A�����̃V�X�e�������Ńe�X�g�ł����H
���������ł�����A���܂�Ӗ����Ȃ��悤�ł����B
�����Ƃ��l��
�P���@�������́A�P����
�ł����B�ς݂܂���ł����B
��������������������������������������
mabo�����
��
��SEC�i�o�v�l�o�́j�@���@���[�p�X�t�B���^�[�i�����ϊ��j�@��X9C�@���@�R���g���[���[�i�d������j���K����DC���[�^�[
�i�R���g���[���[�̃{�����[����X9C��u�������B�j
���߂ł����A
�K����DC���[�^�[�i�R���g���[���[�̃{�����[����X9C��u�������B�j�Ƃ���܂��B
DC���[�^�[�Ɋ��ʂ����āA�����o���Ă��܂��B�@DC���[�^�[�ɕt�����鉽���������āA
���̉����ʼn�������̂ł��傤���H�H
����ƁASEC�������[�p�X�t�B���^�[�@�����@PIC��AD�ϊ��@�����@X9C�@�����@ML�S
����ł����A
���[�p�X�t�B���^�[�ŁAPWM�������܂���ˁA�ŁA���̗��ꂾ�ƁAPIC��x9c�ɂ���āA������x
�����̓d���������܂��B�@����ł́A�Q�x���������܂���I�I
����ł��ǂ��̂ł��傤���H�@������ƌ��A���ʂȊ��������܂��B
���̂��Ƃ́A�ҋ����b�N����������Ă��邱�Ƃ��Ǝv���Ă��܂������B
TR 2019/06/08(Sat) 20:13 No.1618
Re: ���W�[�o�v�l
�s�q����C�����́B
���݂܂���ԈႢ������܂����B
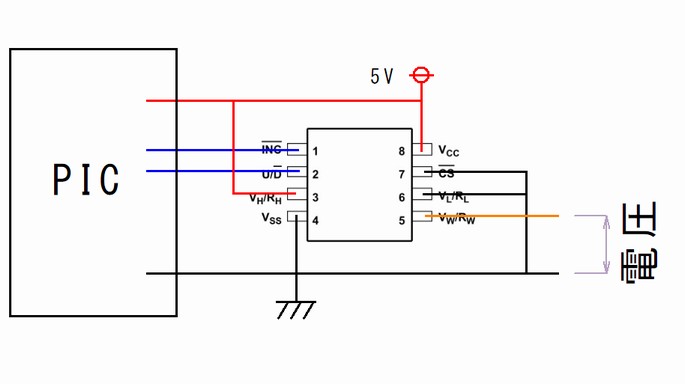
��SEC�i�o�v�l�o�́j�@���@���[�p�X�t�B���^�[�i�����ϊ��j�@��X9C�@���@�R���g���[���[�i�d������j���K����DC���[�^�[
�i�R���g���[���[�̃{�����[����X9C��u�������B�j
����C
���r�d�b�����[�p�X�t�B���^�[���o�h�b�`�c�ϊ����w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
�ŁC�o�h�b�̂`�c�ϊ����ʂ��Ă܂����B
���ʂ̂Ȃ��́C���̗��ꂾ�ƁC�o�v�l�̃R���g���[���[��
�{�����[���Ƃw�X�b��u�������āC�m���߂�C�̈Ӗ��ł����B
���[�^�[�ɂ́C�������Ȃ��đ��v�ł��B
������ƁASEC�������[�p�X�t�B���^�[�@�����@PIC��AD�ϊ��@�����@X9C�@�����@ML�S
������ł����A
�����[�p�X�t�B���^�[�ŁAPWM�������܂���ˁA�ŁA���̗��ꂾ�ƁAPIC��x9c�ɂ���āA������x
�������̓d���������܂��B�@����ł́A�Q�x���������܂���I�I
������ł��ǂ��̂ł��傤���H�@������ƌ��A���ʂȊ��������܂��B
�����̂��Ƃ́A�ҋ����b�N����������Ă��邱�Ƃ��Ǝv���Ă��܂������B
����ł����C�o�h�b�ł���Ă邱�Ƃ́C
���[�p�X�t�B���^�[�œǂݎ�����d�����Ȃ炵�āC
����ɉ������w�X�b�̐ݒ�����邱�Ƃł��B
���[�p�X�t�B���^�[�ł�邱�ƂƁC�o�h�b�łȂ炷���Ƃ́C
�ǂ�����K�v�Ȃ��Ƃ��Ǝv���܂��B
���[�p�X�t�B���^�[��ʂ����M���ɗ��ꂪ����̂ŁC
�ǂݎ�邽�߂ɁC�����ς��Ƃ��Ă܂��B
���̕��ςɊ�Â��āC�w�X�b�̐ݒ�����܂��B
���ꂩ��C�o�@�h�@�c�̐ݒ�ł����ǁC
���݂܂���C�������ł��B
�Ȃ��Ȃ����܂������܂���B
���݂܂���ԈႢ������܂����B
��SEC�i�o�v�l�o�́j�@���@���[�p�X�t�B���^�[�i�����ϊ��j�@��X9C�@���@�R���g���[���[�i�d������j���K����DC���[�^�[
�i�R���g���[���[�̃{�����[����X9C��u�������B�j
����C
���r�d�b�����[�p�X�t�B���^�[���o�h�b�`�c�ϊ����w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
�ŁC�o�h�b�̂`�c�ϊ����ʂ��Ă܂����B
���ʂ̂Ȃ��́C���̗��ꂾ�ƁC�o�v�l�̃R���g���[���[��
�{�����[���Ƃw�X�b��u�������āC�m���߂�C�̈Ӗ��ł����B
���[�^�[�ɂ́C�������Ȃ��đ��v�ł��B
������ƁASEC�������[�p�X�t�B���^�[�@�����@PIC��AD�ϊ��@�����@X9C�@�����@ML�S
������ł����A
�����[�p�X�t�B���^�[�ŁAPWM�������܂���ˁA�ŁA���̗��ꂾ�ƁAPIC��x9c�ɂ���āA������x
�������̓d���������܂��B�@����ł́A�Q�x���������܂���I�I
������ł��ǂ��̂ł��傤���H�@������ƌ��A���ʂȊ��������܂��B
�����̂��Ƃ́A�ҋ����b�N����������Ă��邱�Ƃ��Ǝv���Ă��܂������B
����ł����C�o�h�b�ł���Ă邱�Ƃ́C
���[�p�X�t�B���^�[�œǂݎ�����d�����Ȃ炵�āC
����ɉ������w�X�b�̐ݒ�����邱�Ƃł��B
���[�p�X�t�B���^�[�ł�邱�ƂƁC�o�h�b�łȂ炷���Ƃ́C
�ǂ�����K�v�Ȃ��Ƃ��Ǝv���܂��B
���[�p�X�t�B���^�[��ʂ����M���ɗ��ꂪ����̂ŁC
�ǂݎ�邽�߂ɁC�����ς��Ƃ��Ă܂��B
���̕��ςɊ�Â��āC�w�X�b�̐ݒ�����܂��B
���ꂩ��C�o�@�h�@�c�̐ݒ�ł����ǁC
���݂܂���C�������ł��B
�Ȃ��Ȃ����܂������܂���B
mabo 2019/06/08(Sat) 20:46 No.1619 Re: ���W�[�o�v�l
mabo�����
������ł����C�o�h�b�ł���Ă邱�Ƃ́C
���[�p�X�t�B���^�[�œǂݎ�����d�����Ȃ炵�āC
����ɉ������w�X�b�̐ݒ�����邱�Ƃł��B
���[�p�X�t�B���^�[�ł�邱�ƂƁC�o�h�b�łȂ炷���Ƃ́C
�ǂ�����K�v�Ȃ��Ƃ��Ǝv���܂��B
���[�p�X�t�B���^�[��ʂ����M���ɗ��ꂪ����̂ŁC
�ǂݎ�邽�߂ɁC�����ς��Ƃ��Ă܂��B
���̕��ςɊ�Â��āC�w�X�b�̐ݒ�����܂��B
��ϋ��k�ł����A�{��Ȃ��ʼn������B
x9c�́A�������v���O�������݂�PIC�Ŏg���܂��B
�R���f���T�ƒ�R�́A�����čςނȂ�g��Ȃ������ǂ��Ǝv���܂��B
�Ȃ̂ŁA�悸�́Ax9c�́A�������v���O�������݂�PIC�̔g�`���I�V���Ŕ�ׂĂ݂āA����ł��ǂ����Ȃ��悤�ł�����A
���[�p�X�t�B���^�[�������Ďg���������ǂ��Ǝv���܂���B
�{���ɂ��߂�Ȃ����B�@�����߂������B
������ł����C�o�h�b�ł���Ă邱�Ƃ́C
���[�p�X�t�B���^�[�œǂݎ�����d�����Ȃ炵�āC
����ɉ������w�X�b�̐ݒ�����邱�Ƃł��B
���[�p�X�t�B���^�[�ł�邱�ƂƁC�o�h�b�łȂ炷���Ƃ́C
�ǂ�����K�v�Ȃ��Ƃ��Ǝv���܂��B
���[�p�X�t�B���^�[��ʂ����M���ɗ��ꂪ����̂ŁC
�ǂݎ�邽�߂ɁC�����ς��Ƃ��Ă܂��B
���̕��ςɊ�Â��āC�w�X�b�̐ݒ�����܂��B
��ϋ��k�ł����A�{��Ȃ��ʼn������B
x9c�́A�������v���O�������݂�PIC�Ŏg���܂��B
�R���f���T�ƒ�R�́A�����čςނȂ�g��Ȃ������ǂ��Ǝv���܂��B
�Ȃ̂ŁA�悸�́Ax9c�́A�������v���O�������݂�PIC�̔g�`���I�V���Ŕ�ׂĂ݂āA����ł��ǂ����Ȃ��悤�ł�����A
���[�p�X�t�B���^�[�������Ďg���������ǂ��Ǝv���܂���B
�{���ɂ��߂�Ȃ����B�@�����߂������B
TR 2019/06/08(Sat) 21:11 No.1620 Re: ���W�[�o�v�l
�s�q����A�����́B
����ϋ��k�ł����A�{��Ȃ��ʼn������B
���v�ł���B
���[�p�X�t�B���^�[�g��Ȃ��̂ł���A�f�W�^���Ŏ��
�Ƃ������ƂɂȂ�Ǝv���܂��B
��������ƁA�ҋ����b�N���A�����Ă��ꂽ��̕��̃v���O�������g�����Ȃ�̂��ȁB
�`�c�ϊ����Ȃ��ŁA�f�W�^���Ŏ�������̂��������������A
�m�C�Y���̐S�z�����Ȃ��Ȃ�܂����ˁB
�ҋ����b�N������A�f�W�^���Ŏ������D�݂��Ƃ���������Ă܂����B
�����́A�h���C�o�[����āA�s�j100�`0�W�m1�Ƃ����e�d�s�ŁA
��]�����ׂĂ��܂����B
��]�n�߂���A�ō���]�܂ł́A�͈͂��A�����悤�ł����B
�o�v�l�̃R���g���[���[�́A�c�t�s�x�䂪4���`69���͈̔͂�
�����Ă��܂������A
�������߂��̂́A12���`48���Ƌ����Ȃ�܂����B
�e�d�s�����ւ�����悤�ɂ��܂����̂ŁA
�������ς��āA�����Ă݂悤���ȂƎv���܂��B
����ϋ��k�ł����A�{��Ȃ��ʼn������B
���v�ł���B
���[�p�X�t�B���^�[�g��Ȃ��̂ł���A�f�W�^���Ŏ��
�Ƃ������ƂɂȂ�Ǝv���܂��B
��������ƁA�ҋ����b�N���A�����Ă��ꂽ��̕��̃v���O�������g�����Ȃ�̂��ȁB
�`�c�ϊ����Ȃ��ŁA�f�W�^���Ŏ�������̂��������������A
�m�C�Y���̐S�z�����Ȃ��Ȃ�܂����ˁB
�ҋ����b�N������A�f�W�^���Ŏ������D�݂��Ƃ���������Ă܂����B
�����́A�h���C�o�[����āA�s�j100�`0�W�m1�Ƃ����e�d�s�ŁA
��]�����ׂĂ��܂����B
��]�n�߂���A�ō���]�܂ł́A�͈͂��A�����悤�ł����B
�o�v�l�̃R���g���[���[�́A�c�t�s�x�䂪4���`69���͈̔͂�
�����Ă��܂������A
�������߂��̂́A12���`48���Ƌ����Ȃ�܂����B
�e�d�s�����ւ�����悤�ɂ��܂����̂ŁA
�������ς��āA�����Ă݂悤���ȂƎv���܂��B
mabo 2019/06/08(Sat) 23:25 No.1621 Re: ���W�[�o�v�l
>�@TR����
����Ă��鎖�̈Ӗ����킩��܂��ǁA�������v���������Ȃ�ϒ�R���O���������ǂ��ł��B
�q��������Ԃ��ƃ{�����[���ʒu�Œ�R�l���ς��܂��B
�X�s���h���̊�������R�ׂĂ����ł����H
> �ʐ^�E�̃e�X�g�ł����A�����̃V�X�e�������Ńe�X�g�ł����H
�����ł��B���̉ϒ�R��1�{�̒�R�Œu�������āA���̉ϒ�R�̈Ӗ��ׂ܂��B
�܂�A�ǂ���������H�������Ɍq���ΐ���o����̂��A�Ƃ����A��ԍŏ��ɂ��ׂ����Ƃł��B
�����iPC�����PWM�j�Əo���i�X�s���h���ւ̏o�́j�̎d�l������Ȃ���A�������ǂ���������Ă����f���t���܂���B
����ƁA8�̕��ς��o�����̂̓A�i���O��M�̃v���O�����ł��B�f�W�^���Ȃ�100�ȏ�ɂ��������ǂ��ł��B
�NjL���܂�
�X�s���h���̊�����H�i�g���Ă���IC�j������Ȃ�A����ł��\���܂���B
����Ă��鎖�̈Ӗ����킩��܂��ǁA�������v���������Ȃ�ϒ�R���O���������ǂ��ł��B
�q��������Ԃ��ƃ{�����[���ʒu�Œ�R�l���ς��܂��B
�X�s���h���̊�������R�ׂĂ����ł����H
> �ʐ^�E�̃e�X�g�ł����A�����̃V�X�e�������Ńe�X�g�ł����H
�����ł��B���̉ϒ�R��1�{�̒�R�Œu�������āA���̉ϒ�R�̈Ӗ��ׂ܂��B
�܂�A�ǂ���������H�������Ɍq���ΐ���o����̂��A�Ƃ����A��ԍŏ��ɂ��ׂ����Ƃł��B
�����iPC�����PWM�j�Əo���i�X�s���h���ւ̏o�́j�̎d�l������Ȃ���A�������ǂ���������Ă����f���t���܂���B
����ƁA8�̕��ς��o�����̂̓A�i���O��M�̃v���O�����ł��B�f�W�^���Ȃ�100�ȏ�ɂ��������ǂ��ł��B
�NjL���܂�
�X�s���h���̊�����H�i�g���Ă���IC�j������Ȃ�A����ł��\���܂���B
�ҋ����b�N 2019/06/08(Sat) 23:41 No.1622 Re: ���W�[�o�v�l
mabo����A���͂悤�������܂��B
����������ƁA�ҋ����b�N���A�����Ă��ꂽ��̕��̃v���O�������g�����Ȃ�̂��ȁB
No1553�ł����A�P�T�T�R�͓���āA�A�A�����ł��܂���ł����B
��������������������������������
�ҋ����b�N���͂悤�������܂��B
�����̎����͉����Ȃ��̂ŁA������܂���B
�Ȃ̂ŁA�����ł������ȃX�s�[�h�R���g���[���Ɏg���Ă���ϒ�R��x9c�ɕς��悤�Ƃ��Ă��܂��B
�ŁA
�����āA�ϒ�R���O���āA��R�����āA�����V�X�e���ŃX�s���h�����Ƃ������Ƃ́A
���̗��R��������܂���B
������Ȃ��Ƃ������R
�ϒ�R�ʼn��̂ł��傤����A�Œ��R�ɒu�������Ă��A�X�s�[�h�͕�����܂��A���Ǝv���܂��B
�������Ȃ���e�X�g�����邱�ƂƂ́A�A�A���l����ƁB
����ł��e�X�g����Ƃ������Ƃ́A
�ϒ�R���m���ɁA�X�s���h�����[�^�[�̃X�s�[�h�R���g���[���Ɋ�^���Ă��邩�ǂ�����
�m�F����Ƃ������ƂȂ�ł��傤�ˁB
������܂����B�@����Ă݂܂��B
�e�X�g���@
�ēx�A�ϒ�R�̍ő��R�l���v�����A���̒�R�l�̔����ȏ���g���āA�����V�X�e���ŁA�܂킵�Ă݂�B
������ƁA8�̕��ς��o�����̂̓A�i���O��M�̃v���O�����ł��B�f�W�^���Ȃ�100�ȏ�ɂ��������ǂ���
�T���v�����O��ς���ꍇ�A�v���O�������ꕔ��ς��邪�A
�f�o�C�X�̏��������́A�f�o�C�X�̊W��500������ƌ����Ă��܂����B
�Z�o���@
PWM��{���g��/�T���v����
��
100Hz�Ȃ�A�P������0.01��
�W�T���v����0.01/8��0.00125�����P�Q�T�O�ʂ�
�W�T���v���łP�Q�T�O�A�Ȃ̂ɁA�P�O�O�T���v���A�A
�f�o�C�X�̏�����Ă���̂ŁA�A�A�A
��������������������������
mabo����A�A�A�A
���[�p�X�ƕ��p�ł���I�I�@�����B
����������ƁA�ҋ����b�N���A�����Ă��ꂽ��̕��̃v���O�������g�����Ȃ�̂��ȁB
No1553�ł����A�P�T�T�R�͓���āA�A�A�����ł��܂���ł����B
��������������������������������
�ҋ����b�N���͂悤�������܂��B
�����̎����͉����Ȃ��̂ŁA������܂���B
�Ȃ̂ŁA�����ł������ȃX�s�[�h�R���g���[���Ɏg���Ă���ϒ�R��x9c�ɕς��悤�Ƃ��Ă��܂��B
�ŁA
�����āA�ϒ�R���O���āA��R�����āA�����V�X�e���ŃX�s���h�����Ƃ������Ƃ́A
���̗��R��������܂���B
������Ȃ��Ƃ������R
�ϒ�R�ʼn��̂ł��傤����A�Œ��R�ɒu�������Ă��A�X�s�[�h�͕�����܂��A���Ǝv���܂��B
�������Ȃ���e�X�g�����邱�ƂƂ́A�A�A���l����ƁB
����ł��e�X�g����Ƃ������Ƃ́A
�ϒ�R���m���ɁA�X�s���h�����[�^�[�̃X�s�[�h�R���g���[���Ɋ�^���Ă��邩�ǂ�����
�m�F����Ƃ������ƂȂ�ł��傤�ˁB
������܂����B�@����Ă݂܂��B
�e�X�g���@
�ēx�A�ϒ�R�̍ő��R�l���v�����A���̒�R�l�̔����ȏ���g���āA�����V�X�e���ŁA�܂킵�Ă݂�B
������ƁA8�̕��ς��o�����̂̓A�i���O��M�̃v���O�����ł��B�f�W�^���Ȃ�100�ȏ�ɂ��������ǂ���
�T���v�����O��ς���ꍇ�A�v���O�������ꕔ��ς��邪�A
�f�o�C�X�̏��������́A�f�o�C�X�̊W��500������ƌ����Ă��܂����B
�Z�o���@
PWM��{���g��/�T���v����
��
100Hz�Ȃ�A�P������0.01��
�W�T���v����0.01/8��0.00125�����P�Q�T�O�ʂ�
�W�T���v���łP�Q�T�O�A�Ȃ̂ɁA�P�O�O�T���v���A�A
�f�o�C�X�̏�����Ă���̂ŁA�A�A�A
��������������������������
mabo����A�A�A�A
���[�p�X�ƕ��p�ł���I�I�@�����B
TR 2019/06/09(Sun) 07:18 No.1623 Re: ���W�[�o�v�l
> �ēx�A�ϒ�R�̍ő��R�l���v�����A���̒�R�l�̔����ȏ���g���āA�����V�X�e���ŁA�܂킵�Ă݂�B
�ϒ�R�̍ő�l��1�{�i�`10�{���x�j�܂łȂ�ǂ�ł��ǂ��ł��B�������A�l�͊o���Ă����Ă��������B
�ϒ�R�̍ő�l�i�Œ肳�ꂽ�[�q�ԁj�͊O������Ԃő����Ă��������B
�܂��A����3�{���O������ԂŁA�d�������āA��-���Ԃ̓d�����v�����Ă��������B
�����������獂���d�������m��܂���B
�i������5V�Ȃ炢�����ʂ����ҏo���܂��B�����d�����ƌ������Ȃ�܂��j
���̉ϒ�R�̌Œ蕔���g���Đ�ւ��Ă��ǂ��ł��B
��}�ŁA
�u�ԂƐ��g���čō����A���Ɛ��g���ē����Ȃ��v�Ƃ����̂��u�ǂ����ʁv�ł��B
�Ȃ̂ŁA����Ńe�X�g�I���ł��B
����ȊO�̌��ʂ̏ꍇ�́c
�܂����̎��l���܂��傤�B
�ϒ�R�̍ő�l��1�{�i�`10�{���x�j�܂łȂ�ǂ�ł��ǂ��ł��B�������A�l�͊o���Ă����Ă��������B
�ϒ�R�̍ő�l�i�Œ肳�ꂽ�[�q�ԁj�͊O������Ԃő����Ă��������B
�܂��A����3�{���O������ԂŁA�d�������āA��-���Ԃ̓d�����v�����Ă��������B
�����������獂���d�������m��܂���B
�i������5V�Ȃ炢�����ʂ����ҏo���܂��B�����d�����ƌ������Ȃ�܂��j
���̉ϒ�R�̌Œ蕔���g���Đ�ւ��Ă��ǂ��ł��B
��}�ŁA
�u�ԂƐ��g���čō����A���Ɛ��g���ē����Ȃ��v�Ƃ����̂��u�ǂ����ʁv�ł��B
�Ȃ̂ŁA����Ńe�X�g�I���ł��B
����ȊO�̌��ʂ̏ꍇ�́c
�܂����̎��l���܂��傤�B
�ҋ����b�N 2019/06/09(Sun) 08:54 No.1624 Re: ���W�[�o�v�l
�s�q����C�ҋ����b�N����C���͂悤�������܂��B
�s�q����C���w�E���肪�Ƃ��������܂��B
��mabo����A�A�A�A
�����[�p�X�ƕ��p�ł���I�I�@�����B
����C�u���O�̕��́C��{���g���̕ϊ��̃v���O�����ł����H�B
���N���O�ɁC�ŏ��Ɏ��g���ɁC����ł͂܂�܂����B
�v���O�����͊O���̏��Z�C��H�͓��{�̏��Z�C
�Ƃ����g�ݍ��킹�ŁC���[�p�X�t�B���^�[����āC�������܂����B
���ʁC���[�p���t�B���^�����ƃf�W�^���̃T���v�����O
�ł��Ȃ��Ȃ�܂����B
���́C�Ȃ�ƂȂ������ł���̂ł����E�E�E�E�E�E�E�B
���ꂩ��C�T���v�����O�ł����C�s�q����̂���������Ă邱�Ƃ�����Ƃ킩��Ȃ��̂ł����C
���L�̂悤�ɗ������Ă܂��B
�T���v�����O�̍ŏ��́C�o�h�b�̃N���b�N���Ɉˑ�����̂ŁC
�����g���Ă�o�h�b�́C�W�l�����œ��삵�Ă܂��̂ŁC
�N���b�N8MHz��1�N���b�N0.125��s��1���߃T�C�N��0.5��s
�O�D�T�ʂ����Z�����Ԃł̃T���v�����O�͂ł��܂��C
�����蒷����ΉƗ������Ă܂��B
������������������������������������
�Ⴄ��ނ̂e�d�s�𒍕����Ă��܂��B
��́C���Z�̂g�o�������C�R�O�Q�O�̂e�d�s
������́C�u���O�̕��ɏ������C�l�i�̍��̂���
�o�v�l�̃R���g���[���[�ł��B
������ƁC�y���݂ł����C�w�X�b�́C�܂��Ƃǂ��܂���B
�A���ł̍w���̕����悩�������Ȃ��B
�s�q����C���w�E���肪�Ƃ��������܂��B
��mabo����A�A�A�A
�����[�p�X�ƕ��p�ł���I�I�@�����B
����C�u���O�̕��́C��{���g���̕ϊ��̃v���O�����ł����H�B
���N���O�ɁC�ŏ��Ɏ��g���ɁC����ł͂܂�܂����B
�v���O�����͊O���̏��Z�C��H�͓��{�̏��Z�C
�Ƃ����g�ݍ��킹�ŁC���[�p�X�t�B���^�[����āC�������܂����B
���ʁC���[�p���t�B���^�����ƃf�W�^���̃T���v�����O
�ł��Ȃ��Ȃ�܂����B
���́C�Ȃ�ƂȂ������ł���̂ł����E�E�E�E�E�E�E�B
���ꂩ��C�T���v�����O�ł����C�s�q����̂���������Ă邱�Ƃ�����Ƃ킩��Ȃ��̂ł����C
���L�̂悤�ɗ������Ă܂��B
�T���v�����O�̍ŏ��́C�o�h�b�̃N���b�N���Ɉˑ�����̂ŁC
�����g���Ă�o�h�b�́C�W�l�����œ��삵�Ă܂��̂ŁC
�N���b�N8MHz��1�N���b�N0.125��s��1���߃T�C�N��0.5��s
�O�D�T�ʂ����Z�����Ԃł̃T���v�����O�͂ł��܂��C
�����蒷����ΉƗ������Ă܂��B
������������������������������������
�Ⴄ��ނ̂e�d�s�𒍕����Ă��܂��B
��́C���Z�̂g�o�������C�R�O�Q�O�̂e�d�s
������́C�u���O�̕��ɏ������C�l�i�̍��̂���
�o�v�l�̃R���g���[���[�ł��B
������ƁC�y���݂ł����C�w�X�b�́C�܂��Ƃǂ��܂���B
�A���ł̍w���̕����悩�������Ȃ��B
mabo 2019/06/09(Sun) 09:23 No.1625 Re: ���W�[�o�v�l
�ҋ����b�N����
���k�ł����A�ʐ^�t�ŁA�����肢�܂��B
���k�ł����A�ʐ^�t�ŁA�����肢�܂��B
TR 2019/06/09(Sun) 09:44 No.1626 Re: ���W�[�o�v�l
mabo����
500�}�C�N���́A1553�ɂ���Ղ낮��ނŁA���������ɂ���܂��B
�ҋ����b�N����Ƃ̂����ŁAx9c�̔\�͂ƒ����Ă��܂����B
�����ԈႦ��������܂��Ax9c�́A500�}�C�N�����A�Z���Ԃł́A���삵�Ȃ��Ǝv���܂����B
�ҋ����b�N����ɁA�˂�����ŁA�����Ηǂ������_�ł��B
INC��500�}�C�N���K�v��������܂���B
******
�ҋ����b�N����
�ڂ���������ĉ������Bx9c�̃f�[�^�V�[�g�̉������ǂ̂悤�ɗ����������낵�����B
500�}�C�N���́A1553�ɂ���Ղ낮��ނŁA���������ɂ���܂��B
�ҋ����b�N����Ƃ̂����ŁAx9c�̔\�͂ƒ����Ă��܂����B
�����ԈႦ��������܂��Ax9c�́A500�}�C�N�����A�Z���Ԃł́A���삵�Ȃ��Ǝv���܂����B
�ҋ����b�N����ɁA�˂�����ŁA�����Ηǂ������_�ł��B
INC��500�}�C�N���K�v��������܂���B
******
�ҋ����b�N����
�ڂ���������ĉ������Bx9c�̃f�[�^�V�[�g�̉������ǂ̂悤�ɗ����������낵�����B
TR 2019/06/09(Sun) 10:40 No.1627 Re: ���W�[�o�v�l
�s�q����C�͂��C�s�q������������Ă��̂́C
�w�X�b�̂T�O�O�ʂ��ł������B
����́C�T���v�����O�ł͂Ȃ��C
�w�X�b������C�p�[�����̂ɂ����鎞�ԂƁC
���͗������܂����B
�ł�����C���̓���܂ŁC�T�O�O�ʂ��@�҂̂��Ǝv���Ă܂����B
����̓r���ŁC���̖��߂��Ă��C�t���Ȃ��C
�Ǝv���Ă܂����B
�w�X�b�̂T�O�O�ʂ��ł������B
����́C�T���v�����O�ł͂Ȃ��C
�w�X�b������C�p�[�����̂ɂ����鎞�ԂƁC
���͗������܂����B
�ł�����C���̓���܂ŁC�T�O�O�ʂ��@�҂̂��Ǝv���Ă܂����B
����̓r���ŁC���̖��߂��Ă��C�t���Ȃ��C
�Ǝv���Ă܂����B
mabo 2019/06/09(Sun) 12:27 No.1628 Re: ���W�[�o�v�l
mabo����A�E�ɓ����ł��B
TR 2019/06/09(Sun) 12:36 No.1629 Re: ���W�[�o�v�l
���̕ӂ��2�̒l���L�ڂ���Ă��܂��B
���ߎ��̂�1us�ŗǂ����ł��B
���̌�Ƀ��C�p�[�������Ċ�������܂ł��ő�500us�ł��B�i�W����100us�j
���C�p�[���̂́gmake-before-break�h����ł��B
�܂�A���̃��C�p�[���q���ł���O�̃��C�p�[���܂��B
���K�������҂��Ȃ���Ȃ�Ȃ���ł͖����Ǝv���܂��B
�܂�A�u�҂āv�Ə����Ă���킯�ł͂���܂���B
����ǂ��A�Ⴆ��30���C�p�[�Ƃ���A���i2us�j�Ԋu�Ŗ��߂�����A����Ő����C�p�[�q����A�u�ԓI�ɒ�R��������܂��B
���̕ӂ���ǂ����f���邩�ł��B���ۂɂ͎d�l��A1�̃��C�p�[����ł�1�����Ԃɂ͂Ȃ�܂��B
���́A�m�����Ǝv�����@�������������ł��B
�Ⴆ��10us��while���[�v���Ă�����͂���Ǝv���܂��B
���ߎ��̂�1us�ŗǂ����ł��B
���̌�Ƀ��C�p�[�������Ċ�������܂ł��ő�500us�ł��B�i�W����100us�j
���C�p�[���̂́gmake-before-break�h����ł��B
�܂�A���̃��C�p�[���q���ł���O�̃��C�p�[���܂��B
���K�������҂��Ȃ���Ȃ�Ȃ���ł͖����Ǝv���܂��B
�܂�A�u�҂āv�Ə����Ă���킯�ł͂���܂���B
����ǂ��A�Ⴆ��30���C�p�[�Ƃ���A���i2us�j�Ԋu�Ŗ��߂�����A����Ő����C�p�[�q����A�u�ԓI�ɒ�R��������܂��B
���̕ӂ���ǂ����f���邩�ł��B���ۂɂ͎d�l��A1�̃��C�p�[����ł�1�����Ԃɂ͂Ȃ�܂��B
���́A�m�����Ǝv�����@�������������ł��B
�Ⴆ��10us��while���[�v���Ă�����͂���Ǝv���܂��B
�ҋ����b�N 2019/06/09(Sun) 17:36 No.1630 Re: ���W�[�o�v�l
 �s�q����C�ҋ����b�N����C���͂悤�������܂��B
�s�q����C�ҋ����b�N����C���͂悤�������܂��B�s�q����C���������ύX���āC��R�ǂ��Ȃ�܂������H
���C�p�[��Ԓ[�ɍs���āC�S�O���ɂȂ����ł��傤���B
���́CX9C�܂��͂��Ȃ��̂ŁC
�^��X9C�쐬���āC������ł܂����B
����PWM�R���g���[���[�̃{�����[���Ɗ������āC�������Ă݂���C
��]���́C
�@�@�X�O�����@�P�Q�O�O������
�@�@�W�O�����@�S�R�O�O������
�@�@�V�O�����@�U�O�O�O������
�@�@�U�O�����@�V�O�O�O������
�@�@�T�O�����@�V�V�O�O������
�@�@�S�O�����@�W�P�O�O������
�@�@�R�O�����@�W�T�O�O������
�@�@�Q�O�����@�W�V�O�O������
�@�@�P�O�����@�X�P�O�O������
�@���ŏ����Ă܂����ǁC�P�O�����̒�R�P�O�ŁC
�@�P�O�O�����i���悻�X�O�����j�ɂ͂Ȃ�܂���ł����̂ŁC
�@�@�@�X�O���������P�O�����P���������P�O�����X�̕���
�@�̌��ʂ��炢�̈Ӗ������Ȃ��Ǝv���܂����C
�@����Ȍ��ʂł����B
�@
�@�O���t�ɂ��Ă݂�ƁCC�J�[�u�̃{�����[���̃O���t
�@�ɋ߂��X���ł����B
����������������������������������������������������
�ҋ����b�N����C�s�q����C���L�̗l�ȋL���������܂����B
https://www.cnczone.com/forums/mach-software-artsoft-software-/241922-pid-control-spindle-speed.html
���̏������݂ł́C PID control �́C�r�r���ł͂ł��Ȃ�
�̏������݂ł����B
�p�������Ŏ����́C�ʓ|�ł��˂��B
mabo 2019/06/10(Mon) 11:00 No.1633 Re: ���W�[�o�v�l
�F����ς݂܂���ł����B
��͂�A���[�p�X�t�B���^�[�͕K�v�ł����B
PIC�̃v���O�����́AAD�R���o�[�^�[�ł����B
�Ȃ̂ŁAPIC�ɓ����M���̓��[�p�X�t�B���^�[�ŃA�i���O�����Ȃ���Ȃ�܂���B
��������A���Ⴂ���Ă��܂����B
SEC��`���[�p�X�t�B���^�[�i�P�O�ʁE�Q�Q���j�`PIC�`x9c�`ML4
�ł����B
������������������������
mabo����ցA
�����C�p�[��Ԓ[�ɍs���āC�S�O���ɂȂ����ł��傤���B
x9c�̂P������lj����܂����̂ŁA
���ꂪ������A��������ł��B
�Ⴕ�A�D�]���Ȃ��Ă��A�v��͐i�߂Ă݂܂��B
ML4�̃��[�^�[�����A�ǂ��Ƃ��܂��B
�~�������A���ۂɎg�����炢���̂ł����B
����̌v��́A���G�ł��i�j
���ꂩ��A
1633�̎������ʂ�����ƁA�S�̂̂P�����x�̒�R�l�́A�C�ɂ��Ȃ��Ă��悳�����ł��ˁB
�Ƃ����̂��A�\�����ăX�s���h�����[�^�[�����Ȃ�A����͂���ł����Ǝv���܂��B
�~�܂�Ȃ�������A������ǁA�������������͂Ȃ��ł��傤����B
���R
�v���O�����ŁA�X�s���h����~�̎w�߂�����Ǝv������ł��B
��͂�A���[�p�X�t�B���^�[�͕K�v�ł����B
PIC�̃v���O�����́AAD�R���o�[�^�[�ł����B
�Ȃ̂ŁAPIC�ɓ����M���̓��[�p�X�t�B���^�[�ŃA�i���O�����Ȃ���Ȃ�܂���B
��������A���Ⴂ���Ă��܂����B
SEC��`���[�p�X�t�B���^�[�i�P�O�ʁE�Q�Q���j�`PIC�`x9c�`ML4
�ł����B
������������������������
mabo����ցA
�����C�p�[��Ԓ[�ɍs���āC�S�O���ɂȂ����ł��傤���B
x9c�̂P������lj����܂����̂ŁA
���ꂪ������A��������ł��B
�Ⴕ�A�D�]���Ȃ��Ă��A�v��͐i�߂Ă݂܂��B
ML4�̃��[�^�[�����A�ǂ��Ƃ��܂��B
�~�������A���ۂɎg�����炢���̂ł����B
����̌v��́A���G�ł��i�j
���ꂩ��A
1633�̎������ʂ�����ƁA�S�̂̂P�����x�̒�R�l�́A�C�ɂ��Ȃ��Ă��悳�����ł��ˁB
�Ƃ����̂��A�\�����ăX�s���h�����[�^�[�����Ȃ�A����͂���ł����Ǝv���܂��B
�~�܂�Ȃ�������A������ǁA�������������͂Ȃ��ł��傤����B
���R
�v���O�����ŁA�X�s���h����~�̎w�߂�����Ǝv������ł��B
TR 2019/06/10(Mon) 11:29 No.1634 Re: ���W�[�o�v�l
mabo�����
�����̏������݂ł́C PID control �́C�r�r���ł͂ł��Ȃ�
�O�[�O���|��ʼn𖾂��悤�Ƃ��܂������A����Ղ�Ղ�B
�ł��Amabo����̉���̂Ƃ���ł��傤����A
�}�b�n��PID�́A������SS�ł͖������Ƃ킩��܂����B
�L��������܂��B
�����̏������݂ł́C PID control �́C�r�r���ł͂ł��Ȃ�
�O�[�O���|��ʼn𖾂��悤�Ƃ��܂������A����Ղ�Ղ�B
�ł��Amabo����̉���̂Ƃ���ł��傤����A
�}�b�n��PID�́A������SS�ł͖������Ƃ킩��܂����B
�L��������܂��B
TR 2019/06/10(Mon) 13:52 No.1635 Re: ���W�[�o�v�l
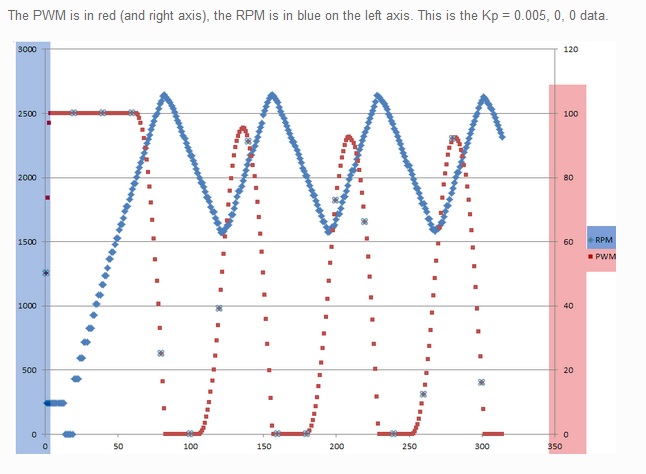 �s�q����C�ҋ����b�N�����́B
�s�q����C�ҋ����b�N�����́B�O�L���ŁC�o�h�c�͂r�r�ł͓����Ȃ��̋L�����������C
�Ə����܂����B
���̋L���́C
Jeff Birt at Warp9 says that one cannot use the PID
control with an external motion control device (eg ESS)
�Ȃ�ł����ǁC����C�������Ȃ�ł��傤���ˁB
�{�Ɓ@�varp9�@�̃t�H�[�����̂����Ă݂��̂ł����C
PID�̘b�肪���\�łĂ܂��B
���������Ȃ��Ȃ�C�b��ɂȂ�Ȃ��悤�ȋC�����Ă��܂����B
MACH4�ł̃R���g���[���̗l�q�ł����C�Y�t�̃O���t������܂����B
��������Ƃ������Ă݂܂��B
PID�̂��Ƃɂ��ẮC������Ղ�HP������܂����B
http://www.picfun.com/motor05.html
��mazon��X9C�͂��̂̂ł����C�܂����܂���B
���낢�날�����Ă���C�ʂȕ��������̂ŁC
����C�lj��Œ������܂����B
https://jp.rs-online.com/web/p/digital-potentiometers/5236816/
�}�j���A�������{��̂���܂����B
https://www.analog.com/media/jp/technical-documentation/data-sheets/AD5220_JP.pdf
������C�����痊�̂ɂƁC�v���܂����B
mabo 2019/06/10(Mon) 23:47 No.1636 Re: ���W�[�o�v�l
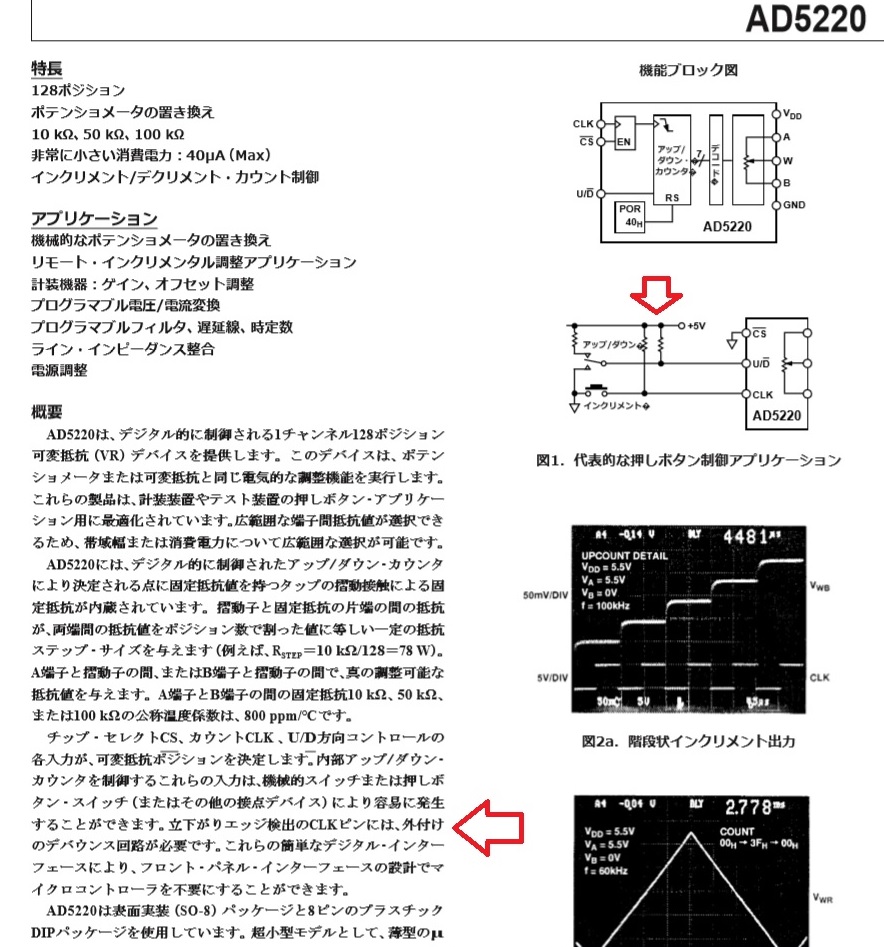 mabo����A���͂悤�������܂��B
mabo����A���͂悤�������܂��B������x9c�ł����A���Ă��܂����悤�ŁA
��ӂ���Ax9c�ɂȂ������j�^�[�pLED���_�����Ȃ��Ȃ�܂����B
����A���肪�Ƃ��������܂��B
INC�EUD�́A�v���A�b�v���Ȃ��Ƃ����Ȃ��悤�ł��ˁB
�����AINK/UD���Ȃ����Ă���PIC�̊e�s�����v���A�b�v�ɕύX���܂��B
����ƁAUP/DOWN�̂��������́A������G�b�W���o��CLK��INK�ƂȂ��Ă��܂��ˁB
����ŁA���������ɂ��遫�̈Ӗ���������܂����B
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500);
}
��������C�����痊�̂ɂƁC�v���܂����B
����́A��r�I�ɒ���ȏ��i�ł悩�����ł��ˁB
�o�C�N�̕��́A�����͂����܂���A�悭���܂�����i�j
TR 2019/06/11(Tue) 06:24 No.1637 Re: ���W�[�o�v�l
mabo����ցA�@�����ꌏ���炵�܂��B
�r�d�b�����[�p�X�t�B���^�[���o�h�b�`�c�ϊ����w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
���̗���ŁA���[�p�X�t�B���^�[�͐������܂������H
�������Ă���悤�ł���AC��R�̐��l�������Ă��������B
�܂��A�J�b�g�I�t���g������������肢���܂��B
�Ƃ����̂��A���̋L�����ڂɎ~�܂�܂����B
No1625
�v���O�����͊O���̏��Z�C��H�͓��{�̏��Z�C
�Ƃ����g�ݍ��킹�ŁC���[�p�X�t�B���^�[����āC�������܂����B
���ʁC���[�p���t�B���^�����ƃf�W�^���̃T���v�����O
�ł��Ȃ��Ȃ�܂����B
�r�d�b�����[�p�X�t�B���^�[���o�h�b�`�c�ϊ����w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
���̗���ŁA���[�p�X�t�B���^�[�͐������܂������H
�������Ă���悤�ł���AC��R�̐��l�������Ă��������B
�܂��A�J�b�g�I�t���g������������肢���܂��B
�Ƃ����̂��A���̋L�����ڂɎ~�܂�܂����B
No1625
�v���O�����͊O���̏��Z�C��H�͓��{�̏��Z�C
�Ƃ����g�ݍ��킹�ŁC���[�p�X�t�B���^�[����āC�������܂����B
���ʁC���[�p���t�B���^�����ƃf�W�^���̃T���v�����O
�ł��Ȃ��Ȃ�܂����B
TR 2019/06/11(Tue) 07:30 No.1638 Re: ���W�[�o�v�l
�s�q����C���͂悤�������܂��B
�s�q����C����́C�w�X�b�̂��̂ł͂Ȃ��̂ŁC
���ԈႢ�̂Ȃ��悤�ɁB
�`�c�T�Q�Q�O�Ƃ����^�Ԃ̂��̂ł��B
���r�d�b�����[�p�X�t�B���^�[���o�h�b�`�c�ϊ����w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
���@���͂��ĂȂ��̂ŁC�k�d�c�ł̂o�h�b�̓���m�F�ł����C
�r�r�������[�p�X�t�B���^�[�����o�h�b�`�c�ϊ����k�d�c
�ŁC����̊m�F�͂��Ă܂��B
�w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
�̕��������m�F�ł��B
���[�p�X�t�B���^�[�́C�Q�O���ƂP�O�ʂe�@�������Ǝv���܂��B
���[�p�X�t�B���^�[����āC���߂������̂́C
���l����Ɠ�����܂��Ȃ̂ł����C�f�W�^���Ŏ�����ł��B
���[�p�X�t�B���^�i���{�̏��Z�̔z���}�j�����f�W�^���i�O���̏��Z�̃v���O�����j
�ł̎��s�ł��B���[�p�X�t�B���^�[�Ɏg������R�ƃR���f���T�[�̑I���̎��s�ł͂Ȃ��ŁC
�A�i���O���f�W�^��
�̂Ȃ���ł̂�����܂��̎��s�ł����B���T�ɂ́C
�w�X�b���`�c�T�Q�Q�O���͂��Ǝv���܂��̂ŁC�m�F���悤�Ǝv���Ă܂��B
���ꂩ��C�p�������ł̂o�h�c�̌����������Ǝv���Ă܂��B
�s�q����C����́C�w�X�b�̂��̂ł͂Ȃ��̂ŁC
���ԈႢ�̂Ȃ��悤�ɁB
�`�c�T�Q�Q�O�Ƃ����^�Ԃ̂��̂ł��B
���r�d�b�����[�p�X�t�B���^�[���o�h�b�`�c�ϊ����w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
���@���͂��ĂȂ��̂ŁC�k�d�c�ł̂o�h�b�̓���m�F�ł����C
�r�r�������[�p�X�t�B���^�[�����o�h�b�`�c�ϊ����k�d�c
�ŁC����̊m�F�͂��Ă܂��B
�w�X�b���R���g���[���[���K���Ȃc�b���[�^�[
�̕��������m�F�ł��B
���[�p�X�t�B���^�[�́C�Q�O���ƂP�O�ʂe�@�������Ǝv���܂��B
���[�p�X�t�B���^�[����āC���߂������̂́C
���l����Ɠ�����܂��Ȃ̂ł����C�f�W�^���Ŏ�����ł��B
���[�p�X�t�B���^�i���{�̏��Z�̔z���}�j�����f�W�^���i�O���̏��Z�̃v���O�����j
�ł̎��s�ł��B���[�p�X�t�B���^�[�Ɏg������R�ƃR���f���T�[�̑I���̎��s�ł͂Ȃ��ŁC
�A�i���O���f�W�^��
�̂Ȃ���ł̂�����܂��̎��s�ł����B���T�ɂ́C
�w�X�b���`�c�T�Q�Q�O���͂��Ǝv���܂��̂ŁC�m�F���悤�Ǝv���Ă܂��B
���ꂩ��C�p�������ł̂o�h�c�̌����������Ǝv���Ă܂��B
mabo 2019/06/11(Tue) 09:40 No.1639 Re: ���W�[�o�v�l
mabo����
�������낻�낭��Ƃ������ƂŁA������ƁB
���������ɋC�ɂȂ�_������܂��B
x9c�ɓd�������Ē����ɁA���j�^�[�pled���_�����܂��B�����A���ۂ̉e���́A�肩�ł���܂���B
���[�p�X�t�B���^�[�̏��L���������܂��B
���ہA�X�s���h������邩�H
�������낻�낭��Ƃ������ƂŁA������ƁB
���������ɋC�ɂȂ�_������܂��B
x9c�ɓd�������Ē����ɁA���j�^�[�pled���_�����܂��B�����A���ۂ̉e���́A�肩�ł���܂���B
���[�p�X�t�B���^�[�̏��L���������܂��B
���ہA�X�s���h������邩�H
TR 2019/06/11(Tue) 10:06 No.1640 Re: ��7�[�o�v�l
mabo����ցA
VGS�̓d���ł����A�QV����ł��ˁA�����ƒႢ�d������̕��������Ǝv���܂��B
VGS�̓d���ł����A�QV����ł��ˁA�����ƒႢ�d������̕��������Ǝv���܂��B
TR 2019/06/07(Fri) 12:51 No.1597
Re: ��7�[�o�v�l
����[�A�܂��܂������������Ă��܂����\
�c�Ǝv������TR�����ĂĂ���Ă�(^^)/
>�@TR����
�E�߂���@�͓��ɂ���܂���B�g�p�҂��������߂Ă��邩�H�ł��傤�B
���̂Ƃ��ẮA������G�R�[�h�ʼn�]���܂ł������Ɛ��䂷��̂��}�V���Ƃ��Ă̓x�X�g�Ȃ̂ł��傤�B
����ǂ����́A�؍�r���ŗl�q�����Ȃ���蓮�ŕς������^�`�Ȃ̂ŁA�S�����̂悤�Ȑ���͖]�݂܂���B
�����Č����AG�R�[�h���I��������ɓ����Ɏ~�܂��Ă�����OK�Ƃ��������ł��B
�Ȃ������猾���A���̂Ȃ����ł��ǂ���������Ȃ����A��肭�͂����Ȃ������m��Ȃ����A�Ƃ��������ł��B
�d�v�ȕ����͍ŏI�I�ȕ����A�܂�x9c�`ML4����肭�s�����ǂ����ł��B
�������e�X�g���Ȃ���Ε��j����܂�܂���B
>�f�W�^���ł���������ǂ��ł��B
����́u�f�W�^���M������M����Ȃ�v�f�W�^���Ŏ������ǂ��A�ƌ����������ł��B�A�i���O�M���Ȃ�ADC�Ŏ܂��B
>Max�ł�1k�����x�ł��ˁB
����́`4.5V�̕����ł��B5V�Ɂu0.5V����Ȃ��v�A�Ƃ���������1k�������Ƃ����Ӗ��ł��B
X9C�Ɋւ��āA�Ȍ��Ɍ����A�o�̓s����VW�s������LED���q������i�d�C���g������j�_���Ƃ������ł��B
LED���������ԂŌv�����Ȃ���ΈӖ�������܂���B
>�@MABO����
�d�C�𗬂����ԂƉ�]������Ⴗ��Ƃ͎v���܂���B�Ⴆ���킹���Ƃ��Ă��A�g���N��������Ƃ܂��������ς��ł��傤�B
�����܂ŁAMACH����̐M���͖ڕW��]���Ƃ��Ă���̂ł����āA���ۂ̉�]���͕ʕ��Ƃ��Đ��䂷��K�v������Ǝv���܂��B
������̓V���N���Ƀ`�F�b�N�����Ȃ���PWM�ŖڕW��]����`����ݒ�̏ꍇ�ł��B
�ŁAMACH�ɂ��̋@�\�i�ڕW��]���ɍ��킹��PWM�M�����ω�����j������̂Ȃ�A���������ǂ������̂��Ɋ��҂��Ă��܂��B
�c�Ǝv������TR�����ĂĂ���Ă�(^^)/
>�@TR����
�E�߂���@�͓��ɂ���܂���B�g�p�҂��������߂Ă��邩�H�ł��傤�B
���̂Ƃ��ẮA������G�R�[�h�ʼn�]���܂ł������Ɛ��䂷��̂��}�V���Ƃ��Ă̓x�X�g�Ȃ̂ł��傤�B
����ǂ����́A�؍�r���ŗl�q�����Ȃ���蓮�ŕς������^�`�Ȃ̂ŁA�S�����̂悤�Ȑ���͖]�݂܂���B
�����Č����AG�R�[�h���I��������ɓ����Ɏ~�܂��Ă�����OK�Ƃ��������ł��B
�Ȃ������猾���A���̂Ȃ����ł��ǂ���������Ȃ����A��肭�͂����Ȃ������m��Ȃ����A�Ƃ��������ł��B
�d�v�ȕ����͍ŏI�I�ȕ����A�܂�x9c�`ML4����肭�s�����ǂ����ł��B
�������e�X�g���Ȃ���Ε��j����܂�܂���B
>�f�W�^���ł���������ǂ��ł��B
����́u�f�W�^���M������M����Ȃ�v�f�W�^���Ŏ������ǂ��A�ƌ����������ł��B�A�i���O�M���Ȃ�ADC�Ŏ܂��B
>Max�ł�1k�����x�ł��ˁB
����́`4.5V�̕����ł��B5V�Ɂu0.5V����Ȃ��v�A�Ƃ���������1k�������Ƃ����Ӗ��ł��B
X9C�Ɋւ��āA�Ȍ��Ɍ����A�o�̓s����VW�s������LED���q������i�d�C���g������j�_���Ƃ������ł��B
LED���������ԂŌv�����Ȃ���ΈӖ�������܂���B
>�@MABO����
�d�C�𗬂����ԂƉ�]������Ⴗ��Ƃ͎v���܂���B�Ⴆ���킹���Ƃ��Ă��A�g���N��������Ƃ܂��������ς��ł��傤�B
�����܂ŁAMACH����̐M���͖ڕW��]���Ƃ��Ă���̂ł����āA���ۂ̉�]���͕ʕ��Ƃ��Đ��䂷��K�v������Ǝv���܂��B
������̓V���N���Ƀ`�F�b�N�����Ȃ���PWM�ŖڕW��]����`����ݒ�̏ꍇ�ł��B
�ŁAMACH�ɂ��̋@�\�i�ڕW��]���ɍ��킹��PWM�M�����ω�����j������̂Ȃ�A���������ǂ������̂��Ɋ��҂��Ă��܂��B
�ҋ����b�N 2019/06/07(Fri) 12:57 No.1598 Re: ��7�[�o�v�l
��X9C�Ɋւ��āA�Ȍ��Ɍ����A�o�̓s����VW�s������LED���q������i�d�C���g������j�_���Ƃ������ł��B
LED���������ԂŌv�����Ȃ���ΈӖ�������܂���B
��R�l�v���̍ۂ������Ă���̂ł��傤���H
���_�ALED��LED�t���̒�R���O���Ă��܂��B
����ł��A300�`8500���ł��B
LED���������ԂŌv�����Ȃ���ΈӖ�������܂���B
��R�l�v���̍ۂ������Ă���̂ł��傤���H
���_�ALED��LED�t���̒�R���O���Ă��܂��B
����ł��A300�`8500���ł��B
TR 2019/06/07(Fri) 13:58 No.1599 Re: ��7�[�o�v�l
�������A�d���𑪂�ۂ̎��ł��B
�ƂȂ�ƁARH-RL�Ԃ�8200���Ȃ̂ł��傤���H
�ŁA��R�l��8500���͈ꉞ�A�z����̐��l�ł��B
�ł�300���͑������܂��ˁB
�܂��A���C�p�[�̒�R�͂��܂�W�Ȃ��ł��傤����A��ԑ厖�Ȃ̂͏o�͂����d���l�ł��B
�ł��Ahttps://www.instructables.com/id/X9C103P-Basic-Operation/
������̌��ʂ������Ȃ����ɁA���̂���ȓ����Ȃ̂��^��ł��B
�܂��A�̔����Ȃ̂ŁA�M�p�ł���f�[�^���͔���܂��ǁB
�ƂȂ�ƁARH-RL�Ԃ�8200���Ȃ̂ł��傤���H
�ŁA��R�l��8500���͈ꉞ�A�z����̐��l�ł��B
�ł�300���͑������܂��ˁB
�܂��A���C�p�[�̒�R�͂��܂�W�Ȃ��ł��傤����A��ԑ厖�Ȃ̂͏o�͂����d���l�ł��B
�ł��Ahttps://www.instructables.com/id/X9C103P-Basic-Operation/
������̌��ʂ������Ȃ����ɁA���̂���ȓ����Ȃ̂��^��ł��B
�܂��A�̔����Ȃ̂ŁA�M�p�ł���f�[�^���͔���܂��ǁB
�ҋ����b�N 2019/06/07(Fri) 14:45 No.1600 Re: ��7�[�o�v�l
�ҋ����b�N�����
�p�ꂪ�ł��đA�܂����ł��B
���������̂X�X��_�E���̐��l��100�ɕύX
���łɁA�A�b�v���X�X����A�P�O�O�ɕύX
��R�l�́A�����Q�P�O���ɂȂ�܂����B
�f�[�^�V�[�g�ɂ͂P�O�O���C�p�[�Ƃ������Ă��������ǁA
�O���܂�Ő����Ă���A�܂�ł��Ȃ��ɖ����ƁA
�ǂ����Ȃ낤�ƁA�Y�݂܂��B�@
�N�Z�l���O�ɂ��ĂƂ��A�\�������ė~�����B
����̖�8.5�����́A�f�[�^�V�[�g��
End-to-End Resistance, �}20%
�ƕ\�L����Ă����̂ŁA���̊W�ł��傤���B
��ԐS�z�Ȃ̂́A��肾���Ă��܂����Ƃł��B
�p�ꂪ�ł��đA�܂����ł��B
���������̂X�X��_�E���̐��l��100�ɕύX
���łɁA�A�b�v���X�X����A�P�O�O�ɕύX
��R�l�́A�����Q�P�O���ɂȂ�܂����B
�f�[�^�V�[�g�ɂ͂P�O�O���C�p�[�Ƃ������Ă��������ǁA
�O���܂�Ő����Ă���A�܂�ł��Ȃ��ɖ����ƁA
�ǂ����Ȃ낤�ƁA�Y�݂܂��B�@
�N�Z�l���O�ɂ��ĂƂ��A�\�������ė~�����B
����̖�8.5�����́A�f�[�^�V�[�g��
End-to-End Resistance, �}20%
�ƕ\�L����Ă����̂ŁA���̊W�ł��傤���B
��ԐS�z�Ȃ̂́A��肾���Ă��܂����Ƃł��B
TR 2019/06/07(Fri) 15:17 No.1601 Re: ��7�[�o�v�l
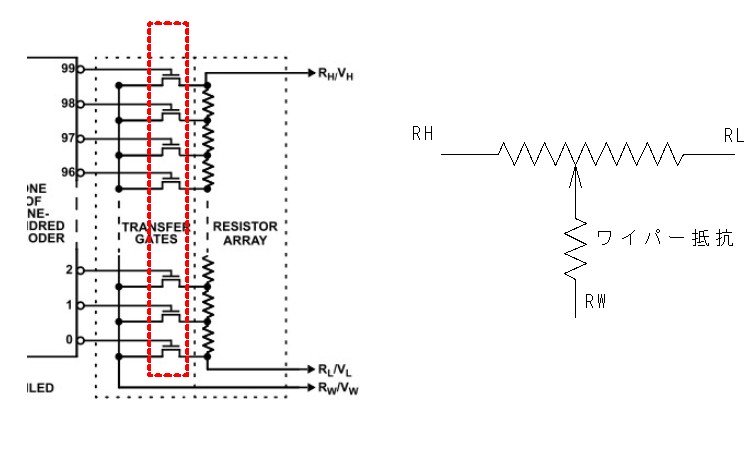 > �P�O�O���C�p�[�Ƃ������Ă��������ǁA
> �P�O�O���C�p�[�Ƃ������Ă��������ǁA���̕ӂ�͈ꏏ�ł���B
�ŁA���C�p�[��R��300��210�Ɩ�90���̃_�E���ł��ˁB
�����������炻�̉���2�i�K����̂�������܂���B
������2����������40���ɂȂ�̂����H�H
���̃v���O�����������̂�������܂���ˁB���ꍇ�ɂ���Ă͂��̉�H���܂�
�Ⴆ�APIC��1.8V�H���瓮�삵�܂��B����AX9C�͐������������5�u�}10���Ƃ��Ȃ苷���͈͂ł��B
�ŁA100uf�̃R���f���T��t������������d���͏㏸���܂�����A�ŏ���PIC�����N�����āAX9C���������o����O��
���������������Ă���\��������܂��B
�Ȃ̂ŁA�E�E�E
���������̑O��
__delay_ms(100);
�Ɠ���Ď����Ă݂Ă��������B
�ŁA�d���̕��ł����ǁAVw�̐�ɉ����q���Ȃ����0�`5V�ɂȂ�Ǝv���Ă��܂��B
�i���C�p�[��R�͊W�Ȃ��A�Ƃ������ł��j
����������ł��Ȃ�ŁA�����ς�킩��܂���B
> ��ԐS�z�Ȃ̂́A��肾���Ă��܂����Ƃł��B
�S�����̒ʂ�ł��ˁB
<�NjL���܂�>
���̓ǂݎ��������ł́A���C�p�[��R�Ƃ͂�����AFET�̃I����R�Ƃ��������Ȃ����Ǝv���Ă��܂��B
�i�m�M�͂���܂��ǁj
�܂�A�Y�t�}�̐ԓ_���̕����̒�R���Ǝv���Ă��܂��B
�������Ƃ�����A�ό`������ΉE�}�̂悤�ɂȂ�̂ŁA������RL�Ɍq�����d������RH�Ɍq�����d���܂Ŏ擾�o���邾�낤�A
�ƍl���Ă��܂��B
���ہA�����Ȃ��Ă���Ȃ��ƍ����ł����ǂˁB
�ҋ����b�N 2019/06/07(Fri) 15:45 No.1602 Re: ��7�[�o�v�l
�ҋ����b�N�����
���A�Ԍ˂�I���܂����`�B�ȒP�B
����������Ă���̂́A���L�̒ʂ�ł��傤���H
�����ɂ���Ă݂܂������A���ς�炸�Q�P�O���`�W�D�T�����ł��B
�@�@�@�L
__delay_ms(100);
//��������
x9c_init();
while (1) {
�d���ł����B
�e�X�^�[�_�̍���GND��
VW�ɂ͉��������ɁA�ԃe�X�^�[�_��VH�i�e�X�^�[�_�ȊO�́A�����t���Ȃ��j���v��
���ʁA0V
�Ԍ˂ƈ���ē���ł��B
���ʐ^���݂܂���B
��R�́A�O�`�X�X�ŁA�P�O�O�ł��ˁB
���A�Ԍ˂�I���܂����`�B�ȒP�B
����������Ă���̂́A���L�̒ʂ�ł��傤���H
�����ɂ���Ă݂܂������A���ς�炸�Q�P�O���`�W�D�T�����ł��B
�@�@�@�L
__delay_ms(100);
//��������
x9c_init();
while (1) {
�d���ł����B
�e�X�^�[�_�̍���GND��
VW�ɂ͉��������ɁA�ԃe�X�^�[�_��VH�i�e�X�^�[�_�ȊO�́A�����t���Ȃ��j���v��
���ʁA0V
�Ԍ˂ƈ���ē���ł��B
���ʐ^���݂܂���B
��R�́A�O�`�X�X�ŁA�P�O�O�ł��ˁB
TR 2019/06/07(Fri) 16:54 No.1603 Re: ��7�[�o�v�l
�v���O�����͂��̒ʂ�ł��B
���ς�炸�ł����B���Ⴀ�A���C�p�[�͈�ԉ��܂ŗ��Ă���̂��Ȃ�?
�܂��A��L�̂悤�ɁA���C�p�[��R�͂��܂�W�Ȃ��Ǝv���Ă��܂��B
�ʒu���������Ă��鎖���d�v�ł��B
�d�v�Ȃ̂͏o�͂̓d����0�`5V�܂œ����Ă���鎖�ł��B
VL�ɂ�GND�AVH�ɂ�5V���q���ł��������B
�E�`�͏�q���{���{���ɂȂ��Ă��Ȃ�(*_*;
���ς�炸�ł����B���Ⴀ�A���C�p�[�͈�ԉ��܂ŗ��Ă���̂��Ȃ�?
�܂��A��L�̂悤�ɁA���C�p�[��R�͂��܂�W�Ȃ��Ǝv���Ă��܂��B
�ʒu���������Ă��鎖���d�v�ł��B
�d�v�Ȃ̂͏o�͂̓d����0�`5V�܂œ����Ă���鎖�ł��B
VL�ɂ�GND�AVH�ɂ�5V���q���ł��������B
�E�`�͏�q���{���{���ɂȂ��Ă��Ȃ�(*_*;
�ҋ����b�N 2019/06/07(Fri) 17:02 No.1604 Re: ��7�[�o�v�l
mabo�����
PWM�pFET��������v���o���܂����B
�����̃N�[�����g�|���v��PWM�ł���Ă��܂��B
�p���[MOS FET�@�@�h�q�k�h�T�Q�O�m�o�a�e
���Ƃ��Ƃ́A�H���d�q��PWM�L�b�g�Ɏg���Ă��܂����B�m�������ł��B
PWM�pFET��������v���o���܂����B
�����̃N�[�����g�|���v��PWM�ł���Ă��܂��B
�p���[MOS FET�@�@�h�q�k�h�T�Q�O�m�o�a�e
���Ƃ��Ƃ́A�H���d�q��PWM�L�b�g�Ɏg���Ă��܂����B�m�������ł��B
TR 2019/06/07(Fri) 21:07 No.1605 Re: ��7�[�o�v�l
�s�q����C�ҋ����b�N����C�����́B
�����́C�c�b���[�^�[���o�v�l�R���g���[���[�̃{�����[����
���ɐ�ւ��āC���ꂱ�����Ă݂܂����B
�l�`�b�g����̂o�v�l�̂c�t�s�x���I�V���Ŋm�F���Ȃ���C
�{�����[���ŁC�l�`�b�g�ւ̓��͂q�o�l��ω��������Ƃ��C
�c�t�s�x��̕ω�������̂��Ȃ��̂��C�m�F���܂����B
�����ɁC�o�@�h�@�c�̂��ꂼ��̐��l���傫���ς��Ă݂܂����B
���ʁC�ڎ��ł��̂ŁC�c�t�s�x�ɑ����̕ω��͌�����悤�ȋC��������̂́C�傫�ȕω��͏��Ȃ������ł����B
�����C�o�̒l��傫������ƁC�c�b���[�^�[�̉�]���P�b���炢��]���āC�����~�܂��Ă��܂��܂��̂ŁC
�e���͂���悤�ł��B
�����̕�������Ƃ���C����Ȃɑ傫���Ȃ������ł��B
�s�q����C�e�d�s�̏Љ�肪�Ƃ��������܂��B
���̂ւ�́C�{���ɋ��ŁC����܂��B
�������Ɏg���Ă�c�b���[�^�[���@�Q�S�u�@�P�T�O�v�@�U�`
�̂��̂ŁC�˓��d�������l����ƁC������ƁC���肬�肩�ȁC
�Ȃ�āC�v���Ă܂��B
����ƁC���g���Ă�o�v�l�R���g���[���[�̃{�����[�����ׂ܂������C
��͂�C�T�u�̃R���g���[���ŁC�P�O�O�j�ł��̂ŁC
�s�q����̒��������w�X�b�Ŏg���邩���ł��B
�l�k�S�Ŏ�������O�ɁC�o�v�l�̃R���g���[���[���ŁC
�ł���̂Ȃ�C���������������������ł��ˁB
�R���g���[���[�́C�Q�W�O�O�~���炢�Ȃ̂ŁB
https://www.amazon.co.jp/ZhongKiYi-12V-110V-DC%E3%83%A2%E3%83%BC%E3%82%BF%E3%83%BC%E3%82%B9%E3%83%94%E3%83%BC%E3%83%89%E3%83%89%E3%83%A9%E3%82%A4%E3%83%90%E3%83%BC%E3%82%B3%E3%83%B3%E3%83%88%E3%83%AD%E3%83%BC%E3%83%A9%E3%83%BCPWM-MACH3%E3%82%B9%E3%83%94%E3%83%B3%E3%83%89%E3%83%AB%E3%82%AC%E3%83%90%E3%83%8E/dp/B07P6VPK5X/ref=sr_1_2?__mk_ja_JP=%E3%82%AB%E3%82%BF%E3%82%AB%E3%83%8A&keywords=%EF%BC%B0%EF%BC%B7%EF%BC%AD+%EF%BC%AD%EF%BC%A1%EF%BC%A3%EF%BC%A8%EF%BC%93&qid=1559915654&s=gateway&sr=8-2
�ҋ����b�N����C���肪�Ƃ��������܂��B
���d�C�𗬂����ԂƉ�]������Ⴗ��Ƃ͎v���܂���B�Ⴆ���킹���Ƃ��Ă��A�g���N��������Ƃ܂��������ς��ł��傤�B
���Ǝv���܂��B���̕��͂킩��܂��C���g���Ă�o�v�l�R���g���[���[��
�e�d�s�̓��������Ă�悤�Ȃ������Ă�̂ł��B
���ɁC�l�`�b�g�ɒ����̋@�\���������Ƃ��Ă��C
���́C�����͈͂��Ă�悤�ȋC������̂ł��B
���ۂ͂킩��܂��B
�ҋ����b�N����́C�ے�I�Ȃ��ӌ��ł���
���Z�̂g�o�ɂ���C��]��������Ƃl�`�b�g�ւ̓��͂�
�T���͈̔͂Ɏ��܂��Ă�Ƃ̋L��������̂ŁC
�e�d�s�̈Ⴂ�Ȃ̂��ȂƎv��������ł��B
�����́C�c�b���[�^�[���o�v�l�R���g���[���[�̃{�����[����
���ɐ�ւ��āC���ꂱ�����Ă݂܂����B
�l�`�b�g����̂o�v�l�̂c�t�s�x���I�V���Ŋm�F���Ȃ���C
�{�����[���ŁC�l�`�b�g�ւ̓��͂q�o�l��ω��������Ƃ��C
�c�t�s�x��̕ω�������̂��Ȃ��̂��C�m�F���܂����B
�����ɁC�o�@�h�@�c�̂��ꂼ��̐��l���傫���ς��Ă݂܂����B
���ʁC�ڎ��ł��̂ŁC�c�t�s�x�ɑ����̕ω��͌�����悤�ȋC��������̂́C�傫�ȕω��͏��Ȃ������ł����B
�����C�o�̒l��傫������ƁC�c�b���[�^�[�̉�]���P�b���炢��]���āC�����~�܂��Ă��܂��܂��̂ŁC
�e���͂���悤�ł��B
�����̕�������Ƃ���C����Ȃɑ傫���Ȃ������ł��B
�s�q����C�e�d�s�̏Љ�肪�Ƃ��������܂��B
���̂ւ�́C�{���ɋ��ŁC����܂��B
�������Ɏg���Ă�c�b���[�^�[���@�Q�S�u�@�P�T�O�v�@�U�`
�̂��̂ŁC�˓��d�������l����ƁC������ƁC���肬�肩�ȁC
�Ȃ�āC�v���Ă܂��B
����ƁC���g���Ă�o�v�l�R���g���[���[�̃{�����[�����ׂ܂������C
��͂�C�T�u�̃R���g���[���ŁC�P�O�O�j�ł��̂ŁC
�s�q����̒��������w�X�b�Ŏg���邩���ł��B
�l�k�S�Ŏ�������O�ɁC�o�v�l�̃R���g���[���[���ŁC
�ł���̂Ȃ�C���������������������ł��ˁB
�R���g���[���[�́C�Q�W�O�O�~���炢�Ȃ̂ŁB
https://www.amazon.co.jp/ZhongKiYi-12V-110V-DC%E3%83%A2%E3%83%BC%E3%82%BF%E3%83%BC%E3%82%B9%E3%83%94%E3%83%BC%E3%83%89%E3%83%89%E3%83%A9%E3%82%A4%E3%83%90%E3%83%BC%E3%82%B3%E3%83%B3%E3%83%88%E3%83%AD%E3%83%BC%E3%83%A9%E3%83%BCPWM-MACH3%E3%82%B9%E3%83%94%E3%83%B3%E3%83%89%E3%83%AB%E3%82%AC%E3%83%90%E3%83%8E/dp/B07P6VPK5X/ref=sr_1_2?__mk_ja_JP=%E3%82%AB%E3%82%BF%E3%82%AB%E3%83%8A&keywords=%EF%BC%B0%EF%BC%B7%EF%BC%AD+%EF%BC%AD%EF%BC%A1%EF%BC%A3%EF%BC%A8%EF%BC%93&qid=1559915654&s=gateway&sr=8-2
�ҋ����b�N����C���肪�Ƃ��������܂��B
���d�C�𗬂����ԂƉ�]������Ⴗ��Ƃ͎v���܂���B�Ⴆ���킹���Ƃ��Ă��A�g���N��������Ƃ܂��������ς��ł��傤�B
���Ǝv���܂��B���̕��͂킩��܂��C���g���Ă�o�v�l�R���g���[���[��
�e�d�s�̓��������Ă�悤�Ȃ������Ă�̂ł��B
���ɁC�l�`�b�g�ɒ����̋@�\���������Ƃ��Ă��C
���́C�����͈͂��Ă�悤�ȋC������̂ł��B
���ۂ͂킩��܂��B
�ҋ����b�N����́C�ے�I�Ȃ��ӌ��ł���
���Z�̂g�o�ɂ���C��]��������Ƃl�`�b�g�ւ̓��͂�
�T���͈̔͂Ɏ��܂��Ă�Ƃ̋L��������̂ŁC
�e�d�s�̈Ⴂ�Ȃ̂��ȂƎv��������ł��B
mabo 2019/06/07(Fri) 22:56 No.1606 Re: ��7�[�o�v�l
mabo�����
����
���Љ���������APWM�R���g���[���[�ł����A�H���d�q�Ɠ����@�\�������Ă��܂����H�H�H
http://akizukidenshi.com/catalog/g/gK-06244/
�ȑO�ADC���[�^�[�̃X�s�[�h�R���g���[���Ɏg���Ă��܂����B
�A�}�]���̏��i�����͕����肸�炢�̂ł��������܂����B
�����@�\���Ǝv���܂����������ł��傤���H
>�����ɁC�o�@�h�@�c�̂��ꂼ��̐��l���傫���ς��Ă݂܂����B
PID�́A�H����̔g�`������@��ł����H
����
���Љ���������APWM�R���g���[���[�ł����A�H���d�q�Ɠ����@�\�������Ă��܂����H�H�H
http://akizukidenshi.com/catalog/g/gK-06244/
�ȑO�ADC���[�^�[�̃X�s�[�h�R���g���[���Ɏg���Ă��܂����B
�A�}�]���̏��i�����͕����肸�炢�̂ł��������܂����B
�����@�\���Ǝv���܂����������ł��傤���H
>�����ɁC�o�@�h�@�c�̂��ꂼ��̐��l���傫���ς��Ă݂܂����B
PID�́A�H����̔g�`������@��ł����H
TR 2019/06/08(Sat) 05:42 No.1607 Re: ��7�[�o�v�l
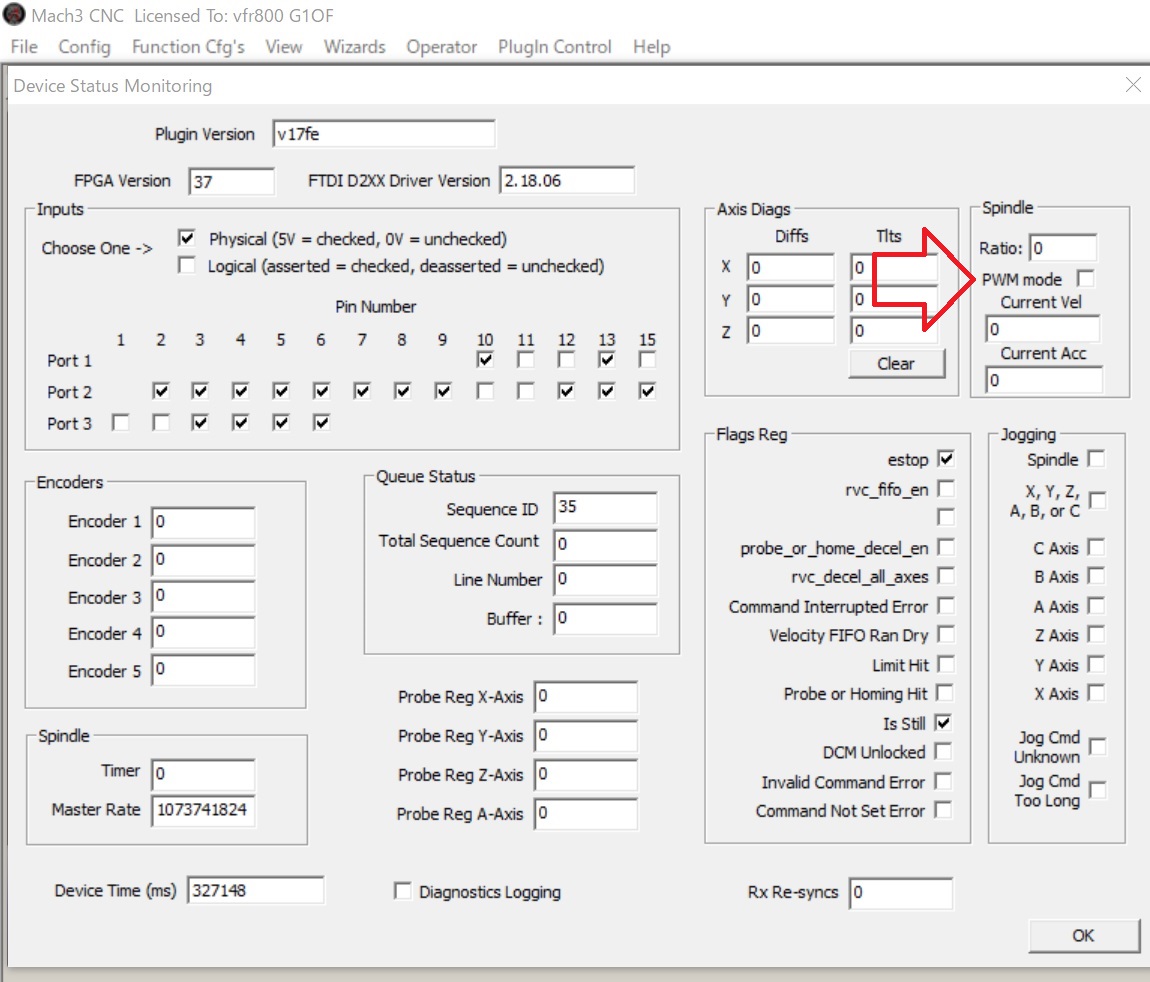 mabo�����
mabo��������Amach�̉�ʂŋC�Â�������܂����B
smoothstepper�̃v���O�C���R���g���[���@�N���b�N���āA
����ɁA
�X���X�X�e�b�p�[�̃f�[�^���j�^�����O���N���b�N����ƌ�����ʂł��B
�ʐ^�̉E����A�Ԗ���PWM�Ɖ������I�I
�N���b�N����̂ł́A����������ASS�ŁA�X�s���h���ׂ̈ɂȂ����s������PWM���ł���̂ł́H�H
�ł��A����̌v�悪���܂���������A
FUSION360��CAM�ō�����v���O������
�X�s���h�����A����ł���̂�
��ϕ֗��ɂȂ�B
TR 2019/06/08(Sat) 09:01 No.1608 Re: ��7�[�o�v�l
> MABO����
DC���[�^�̓������猾���A�m���ɓd���Ƒ��x�͔��W�ɂ���܂��ˁB
�����A�}�u�`���[�^�Ƃ��͂�����������܂��ǁA�H�Ɨp�̉ϑ����[�^��
�X�s���h���p�̃��[�^�͂�����Ɠ������Ⴄ�Ǝv���܂��B
�g���N�������Ă��}�u�`���[�^�̂悤�ɑ��x�͗����܂��A�i���j�ᑬ�ł����܂���B
���n�߂��u�Ԃɂ͂�����x�̑��x�ɂȂ�܂��B
�܂��AFET���܂߂��h���C�o�̓����Ƃ������ɂȂ��ł��傤���B
�����g�̓��[�^�ƃh���C�o�ƕ����ăe�X�g����o���������̂ŕς�����A���ɋ߂��Ȃ邩������܂���B
����ƁANo.1595�̓����ł����ǁA���Ȃ�ǂ��Ǝv���܂��B�ł����̓����}����A���]�X�͂킩��܂���B
���̐}�Ō���ׂ��Ƃ���͂ǂ̈ʂŃX�C�b�`���O����邩�A�����āA���A���y�A�܂ŗ����邩�A�ƌ��������ł��B
�u5V��PWM�Ȃ甼����2.5V�ŃX�C�b�`���O����Ă���̂��ǂ��v�A�Ƃ������ɂȂ�܂��B
���x�����ɂ��u���������ł����A�d���l�A�܂������FET�̎�ނő傫���ς��܂����ǁA�����̗\������[���傫�����
�ǂ��̂ł͂Ȃ��ł��傤���B
�����A���́u���W�v�̕����ł͊W�̂Ȃ������}�ł��B
�v�̓X�C�b�`���O���x�������A�^�[���I�����Ԃƃ^�[���I�t���Ԃ������i�ł��Z���j�Ƃ����������Ǝv���܂��B
FET�̃Q�[�g�̓R���f���T�Ɠ����ł�����e�ʂ����Ȃ������ǂ��Ǝv���܂��B
�ŁA���Ƃ�͂�C�ɂ���̂̓I����R�ł��B��͂�ᔭ�M�̕����ǂ��ł���ˁB
�Ƃ����Ă��A�A�i���O��H�͕�����������x�ł�����B
���ƁAMACH�̕��ł����ǁA[CLOSED LOOP]�Ƀ`�F�b�N�͓���܂�����ˁH�i�m�F�܂Łj
> TR����
�H���̂�́u�{�����[����PWM�ݒ聨���[�^����v�Ƃ����蓮�X�s�[�h�R���g���[���ł��B
�A�}�]���̂�́A���\�^�C�v�ł��B
�d����AC100V�������܂����A�R���g���[�����蓮�AMACH����̃p���X���͂̐�ւ����ł��܂��B
�쓮�\�͂����{�`1�����x�Ⴄ�Ǝv���܂��B
�iFET�͊�̐^�������M��̏��ɂ���̂ł��傤�B�m�F�ł��܂���j
DC���[�^�̓������猾���A�m���ɓd���Ƒ��x�͔��W�ɂ���܂��ˁB
�����A�}�u�`���[�^�Ƃ��͂�����������܂��ǁA�H�Ɨp�̉ϑ����[�^��
�X�s���h���p�̃��[�^�͂�����Ɠ������Ⴄ�Ǝv���܂��B
�g���N�������Ă��}�u�`���[�^�̂悤�ɑ��x�͗����܂��A�i���j�ᑬ�ł����܂���B
���n�߂��u�Ԃɂ͂�����x�̑��x�ɂȂ�܂��B
�܂��AFET���܂߂��h���C�o�̓����Ƃ������ɂȂ��ł��傤���B
�����g�̓��[�^�ƃh���C�o�ƕ����ăe�X�g����o���������̂ŕς�����A���ɋ߂��Ȃ邩������܂���B
����ƁANo.1595�̓����ł����ǁA���Ȃ�ǂ��Ǝv���܂��B�ł����̓����}����A���]�X�͂킩��܂���B
���̐}�Ō���ׂ��Ƃ���͂ǂ̈ʂŃX�C�b�`���O����邩�A�����āA���A���y�A�܂ŗ����邩�A�ƌ��������ł��B
�u5V��PWM�Ȃ甼����2.5V�ŃX�C�b�`���O����Ă���̂��ǂ��v�A�Ƃ������ɂȂ�܂��B
���x�����ɂ��u���������ł����A�d���l�A�܂������FET�̎�ނő傫���ς��܂����ǁA�����̗\������[���傫�����
�ǂ��̂ł͂Ȃ��ł��傤���B
�����A���́u���W�v�̕����ł͊W�̂Ȃ������}�ł��B
�v�̓X�C�b�`���O���x�������A�^�[���I�����Ԃƃ^�[���I�t���Ԃ������i�ł��Z���j�Ƃ����������Ǝv���܂��B
FET�̃Q�[�g�̓R���f���T�Ɠ����ł�����e�ʂ����Ȃ������ǂ��Ǝv���܂��B
�ŁA���Ƃ�͂�C�ɂ���̂̓I����R�ł��B��͂�ᔭ�M�̕����ǂ��ł���ˁB
�Ƃ����Ă��A�A�i���O��H�͕�����������x�ł�����B
���ƁAMACH�̕��ł����ǁA[CLOSED LOOP]�Ƀ`�F�b�N�͓���܂�����ˁH�i�m�F�܂Łj
> TR����
�H���̂�́u�{�����[����PWM�ݒ聨���[�^����v�Ƃ����蓮�X�s�[�h�R���g���[���ł��B
�A�}�]���̂�́A���\�^�C�v�ł��B
�d����AC100V�������܂����A�R���g���[�����蓮�AMACH����̃p���X���͂̐�ւ����ł��܂��B
�쓮�\�͂����{�`1�����x�Ⴄ�Ǝv���܂��B
�iFET�͊�̐^�������M��̏��ɂ���̂ł��傤�B�m�F�ł��܂���j
�ҋ����b�N 2019/06/08(Sat) 11:54 No.1609 Re: ��7�[�o�v�l
mabo����A�ҋ����b�N�����
>MACH����̃p���X���͂̐�ւ����ł��܂��B
������ɂ��Ă��ADC�d����PWM���ł���킯�ł���ˁB
���̃R���g���[���[�̖ړI�́ADC�d����PWM�����邱�Ƃł���ˁB
�����Ȃ�ƁA
SS�`SEC��iPWM���j�`���[�p�X�t�B���^�[�i�A�i���O���j�`�A�}�]��PWM�R���g���[���[�iPWM���j�ƂȂ�킯�ł��ˁB
��������A�����̏ꍇ
�`x9c(�f�W�^����������������d�C�G�l���M�[)�`ML4
��L�̗����mabo����́A�e�X�g�̏エ���߂Ȃ낤���H
�悭�킩��Ȃ��̂ł����A�A
�����̖ړI�́AML4�ɂ��Ă���ϒ�R��x9c�Ɋ������āA���܂���������X�s���h�����[�^�[�𐧌�ł���f�X�B
���̏ꍇ�A
�`���[�p�X�t�B���^�[�i�A�i���O���j�`�A�}�]��PWM�R���g���[���[�iPWM���j
���̕����͕s�v�Ɏv���܂����A�@���ł��傤���H
��������̂����ł́A���������Ă��銴�������܂����ǁB
���_�A�����Ȃ�ł͂Ȃ��A
�����̐���V�X�e�����g�āALED�̓_�����m�F���Ă���AML4��x9c���q���܂��B
�e�X�g���@
SS�`SEC��iPWM���j�`x9c(�f�W�^����������������d�C�G�l���M�[)�`LED
�������A
�ҋ����b�N����̃v���O�������w�K���Ă��܂����A�Ȃ��Ax9c���A��8.5�����܂ł����オ��Ȃ��낤���H
������܂���B
>MACH����̃p���X���͂̐�ւ����ł��܂��B
������ɂ��Ă��ADC�d����PWM���ł���킯�ł���ˁB
���̃R���g���[���[�̖ړI�́ADC�d����PWM�����邱�Ƃł���ˁB
�����Ȃ�ƁA
SS�`SEC��iPWM���j�`���[�p�X�t�B���^�[�i�A�i���O���j�`�A�}�]��PWM�R���g���[���[�iPWM���j�ƂȂ�킯�ł��ˁB
��������A�����̏ꍇ
�`x9c(�f�W�^����������������d�C�G�l���M�[)�`ML4
��L�̗����mabo����́A�e�X�g�̏エ���߂Ȃ낤���H
�悭�킩��Ȃ��̂ł����A�A
�����̖ړI�́AML4�ɂ��Ă���ϒ�R��x9c�Ɋ������āA���܂���������X�s���h�����[�^�[�𐧌�ł���f�X�B
���̏ꍇ�A
�`���[�p�X�t�B���^�[�i�A�i���O���j�`�A�}�]��PWM�R���g���[���[�iPWM���j
���̕����͕s�v�Ɏv���܂����A�@���ł��傤���H
��������̂����ł́A���������Ă��銴�������܂����ǁB
���_�A�����Ȃ�ł͂Ȃ��A
�����̐���V�X�e�����g�āALED�̓_�����m�F���Ă���AML4��x9c���q���܂��B
�e�X�g���@
SS�`SEC��iPWM���j�`x9c(�f�W�^����������������d�C�G�l���M�[)�`LED
�������A
�ҋ����b�N����̃v���O�������w�K���Ă��܂����A�Ȃ��Ax9c���A��8.5�����܂ł����オ��Ȃ��낤���H
������܂���B
TR 2019/06/08(Sat) 12:49 No.1610 Re: ��7�[�o�v�l
�ҋ����b�N�����
�v���O�����ɂ��ċ����Ă��������B
�P�s�ڂŁA�����������Ăяo���Ă���̂ŁA
�P�s�ڂŁA���X���̒l���O�Ƃ��Ă��܂���ˁH
�V�s��
for����target�ɁAadc�z��̒l���O�C�P�C�Q�C�R�̌v�S��̍��v�l���������Ă��܂���ˁA
�W�s��
�V�s�ڂɂ��A�S�Ⴞ��܂ɂ���target���A�����ŁA�S�O�D�X�R�Ŋ����Ă���̂ł���ˁB
�X�s�ڂ́A�܂��܂��A����A
�X�s�ڂ́Ax9c_up�����Ăяo���A
���A
�����l�O�Ŏn�܂�,//�O���ϐ��@char x9c_val�̒l��
�P�Â�target�̒��߉��ʂ̒l�܂ň����グ�Ă���̂ł��傤���H
//��������
01 x9c_init();
02 while (1) {
03 static unsigned int adc[4] = {0};
04 static char num = 0;
05 unsigned int target = 0;
06 adc[(++num)&3] = adconv();
07 for (char i = 0; i < 4; i++)target += adc[i];
08 target /=40.93;
09 if (target > x9c_val)x9c_up();
10 else if (target < x9c_val)x9c_dowm();
11 __delay_ms(1);
12 }
�����Ȃ��Ă��݂܂���B
�X�������肢���܂��B
�v���O�����ɂ��ċ����Ă��������B
�P�s�ڂŁA�����������Ăяo���Ă���̂ŁA
�P�s�ڂŁA���X���̒l���O�Ƃ��Ă��܂���ˁH
�V�s��
for����target�ɁAadc�z��̒l���O�C�P�C�Q�C�R�̌v�S��̍��v�l���������Ă��܂���ˁA
�W�s��
�V�s�ڂɂ��A�S�Ⴞ��܂ɂ���target���A�����ŁA�S�O�D�X�R�Ŋ����Ă���̂ł���ˁB
�X�s�ڂ́A�܂��܂��A����A
�X�s�ڂ́Ax9c_up�����Ăяo���A
���A
�����l�O�Ŏn�܂�,//�O���ϐ��@char x9c_val�̒l��
�P�Â�target�̒��߉��ʂ̒l�܂ň����グ�Ă���̂ł��傤���H
//��������
01 x9c_init();
02 while (1) {
03 static unsigned int adc[4] = {0};
04 static char num = 0;
05 unsigned int target = 0;
06 adc[(++num)&3] = adconv();
07 for (char i = 0; i < 4; i++)target += adc[i];
08 target /=40.93;
09 if (target > x9c_val)x9c_up();
10 else if (target < x9c_val)x9c_dowm();
11 __delay_ms(1);
12 }
�����Ȃ��Ă��݂܂���B
�X�������肢���܂��B
TR 2019/06/08(Sat) 13:07 No.1611 Re: ��7�[�o�v�l
TR����̏ꍇ���ϒ�R�����Ȃ�A�W�Ȃ��Ǝv���܂��B
> �����̐���V�X�e�����g�āALED�̓_�����m�F
���₢��A����Ȃ��Ƃ�����K�v����܂���B
�Ⴆ���̉ϒ�R�̌��ɂȂ��Ă���3�{�̐��i����L5�ALg�ALout�Ƃ���Ɓj�A
�@10k�����x�̒�R���ALg��Lout���q������Ԃœ������H
�A10k���̒�R���AL5��Lout�Ɍq������Ԃœ������H
�ƌ��������ł��B�@�œ����Ȃ��ŁA�A��MAX�ʼn��Α��v�ł��B
�A�ŁA�ᑬ��]�⓮���Ȃ��̂Ȃ�ʖځA�Ƃ������ɂȂ邩���B
LED��PIC�v���O�����̊m�F�ɂ����Ȃ�܂���B
> x9c���A��8.5�����܂ł����オ��Ȃ��낤���H
RH-RL�Ԃ̒�R�͂ǂ̂��炢�ł��傤��?
���ۂɂ͂��̒�R�l�͖��ł͂���܂���B���̓��C�p�[�ʒu��0����X�X�܂œ����Ă��邩�A�ł��B
ML4�͒�R�l���v�����Ă����ł͖����̂ŁA�Ƃɂ����A�d���̕����v�����Ă��������B
if (target > x9c_val)x9c_up();
�u�ڕW�l�v���u���݂̃��C�p�[�ʒu�v�����傫����A���C�p�[�ʒu��1������B
�Ƃ����Ӗ��ł��B���i�K����Ă�����Awhile�̃��[�v�𐔉����āA�ڕW�l�����C�p�[�ʒu���ɂ��܂��B
> 10 else if (target < x9c_val)x9c_dowm();
�Ŋ��́Ax9c_down();�ł��B
> �����̐���V�X�e�����g�āALED�̓_�����m�F
���₢��A����Ȃ��Ƃ�����K�v����܂���B
�Ⴆ���̉ϒ�R�̌��ɂȂ��Ă���3�{�̐��i����L5�ALg�ALout�Ƃ���Ɓj�A
�@10k�����x�̒�R���ALg��Lout���q������Ԃœ������H
�A10k���̒�R���AL5��Lout�Ɍq������Ԃœ������H
�ƌ��������ł��B�@�œ����Ȃ��ŁA�A��MAX�ʼn��Α��v�ł��B
�A�ŁA�ᑬ��]�⓮���Ȃ��̂Ȃ�ʖځA�Ƃ������ɂȂ邩���B
LED��PIC�v���O�����̊m�F�ɂ����Ȃ�܂���B
> x9c���A��8.5�����܂ł����オ��Ȃ��낤���H
RH-RL�Ԃ̒�R�͂ǂ̂��炢�ł��傤��?
���ۂɂ͂��̒�R�l�͖��ł͂���܂���B���̓��C�p�[�ʒu��0����X�X�܂œ����Ă��邩�A�ł��B
ML4�͒�R�l���v�����Ă����ł͖����̂ŁA�Ƃɂ����A�d���̕����v�����Ă��������B
if (target > x9c_val)x9c_up();
�u�ڕW�l�v���u���݂̃��C�p�[�ʒu�v�����傫����A���C�p�[�ʒu��1������B
�Ƃ����Ӗ��ł��B���i�K����Ă�����Awhile�̃��[�v�𐔉����āA�ڕW�l�����C�p�[�ʒu���ɂ��܂��B
> 10 else if (target < x9c_val)x9c_dowm();
�Ŋ��́Ax9c_down();�ł��B
�ҋ����b�N 2019/06/08(Sat) 14:20 No.1612 Re: ��7�[�o�v�l
�v���́A�V����x9c102�����Ă���ɂ��܂��傤��A
���́A�u���b�g�{�[�h���炘�X��103�O���Ă��܂��܂����B
�ǂ����悤���Ȃ��Ȃ�����A�ēx�u���b�g�{�[�h��g�ݗ��Ă܂���B
�X�s�ڂ́A
C����s����Ȏ����ɂƂ��ẮA������Ȃ��g�����ł����B
�ǂ����Ă��Ƃ����ƁA
�����Ăяo���āA���Aif���������ɂ��邩��ł��B
���܂ł́Aif���́o�p���́A���������A�ϐ��ł�������B
x9c_up���́Awiper up������R�����iCS�i�O�����h�ցj,INK,UD�j�����{��������ł���ˁH
//��������
01 x9c_init();
02 while (1) {
03 static unsigned int adc[4] = {0};
04 static char num = 0;
05 unsigned int target = 0;
06 adc[(++num)&3] = adconv();
07 for (char i = 0; i < 4; i++)target += adc[i];
08 target /=40.93;
09 if (target > x9c_val)x9c_up();
10 else if (target < x9c_val)x9c_dowm();
11 __delay_ms(1);
12 }
���Ⴆ���̉ϒ�R�̌��ɂȂ��Ă���3�{�̐��i����L5�ALg�ALout�Ƃ���Ɓj�A
�@10k�����x�̒�R���ALg��Lout���q������Ԃœ������H
�ҋ����b�N����̂̌����Ă���Ӗ����z�����܂���B
LED�̑���ɁA�P�O���I�[�����Ȃ����ꍇ�A��������V�X�e���Ń}�b�n�����삷�邩�Ƃ������Ƃł��傤���H
�����ł���Ax9c�̂R�[�q��L�T�ALg,Lout�Ɍq���̂��ȁH
���́A�u���b�g�{�[�h���炘�X��103�O���Ă��܂��܂����B
�ǂ����悤���Ȃ��Ȃ�����A�ēx�u���b�g�{�[�h��g�ݗ��Ă܂���B
�X�s�ڂ́A
C����s����Ȏ����ɂƂ��ẮA������Ȃ��g�����ł����B
�ǂ����Ă��Ƃ����ƁA
�����Ăяo���āA���Aif���������ɂ��邩��ł��B
���܂ł́Aif���́o�p���́A���������A�ϐ��ł�������B
x9c_up���́Awiper up������R�����iCS�i�O�����h�ցj,INK,UD�j�����{��������ł���ˁH
//��������
01 x9c_init();
02 while (1) {
03 static unsigned int adc[4] = {0};
04 static char num = 0;
05 unsigned int target = 0;
06 adc[(++num)&3] = adconv();
07 for (char i = 0; i < 4; i++)target += adc[i];
08 target /=40.93;
09 if (target > x9c_val)x9c_up();
10 else if (target < x9c_val)x9c_dowm();
11 __delay_ms(1);
12 }
���Ⴆ���̉ϒ�R�̌��ɂȂ��Ă���3�{�̐��i����L5�ALg�ALout�Ƃ���Ɓj�A
�@10k�����x�̒�R���ALg��Lout���q������Ԃœ������H
�ҋ����b�N����̂̌����Ă���Ӗ����z�����܂���B
LED�̑���ɁA�P�O���I�[�����Ȃ����ꍇ�A��������V�X�e���Ń}�b�n�����삷�邩�Ƃ������Ƃł��傤���H
�����ł���Ax9c�̂R�[�q��L�T�ALg,Lout�Ɍq���̂��ȁH
TR 2019/06/08(Sat) 15:08 No.1613 Re: ��7�[�o�v�l
�ҋ����b�N�����
�v���O�����ł����A���ł��B
����t���������ǂ��̂ł́H
�O�@if (target > x9c_val)x9c_up();
�ύX��@if (target >= x9c_val)x9c_up();
�v���O�����ł����A���ł��B
����t���������ǂ��̂ł́H
�O�@if (target > x9c_val)x9c_up();
�ύX��@if (target >= x9c_val)x9c_up();
TR 2019/06/08(Sat) 18:01 No.1614 Re: ��7�[�o�v�l
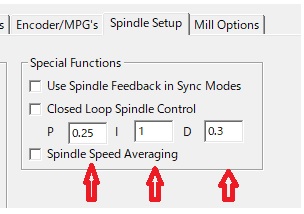 �s�q����C�ҋ����b�N����C����ɂ��́H
�s�q����C�ҋ����b�N����C����ɂ��́H�����́C������ƁC�R�d���Ŕ��Ă܂��B
���āC�s�q����C
>�����ɁC�o�@�h�@�c�̂��ꂼ��̐��l���傫���ς��Ă݂܂����B
����ł����ǁC
�o�@�h�@�c�́C�l�`�b�g�ɂ���ݒ�ł��B
Config��Ports and Pins��Spindle�@Setup
�T�v�́C���L�ɂ��łĂ܂��B
https://ja.wikipedia.org/wiki/PID%E5%88%B6%E5%BE%A1
�Љ����mazon��PWM�R���g���[���[�ł����C
�A���ɂ��������l�i�ł���܂��ˁBMACH�R�@PWM�@�ł�����Ƃ�����܂��B
���̃R���g���[���[�Љ���̂́C
X9C��ML4�������Ȃ�Ȃ��̂́C���X�N���邩�ȂƎv��������ł��B
ML�S�̉�H���ǂ��Ȃ��Ă邩�킩��܂��C�����Ȃ���C
���X�N���邩�ȂȂ�Ďv��������ŁC���ӂ͂���܂���B
�����C����̊m�F�́C�ł���Ǝv���܂��B
���̃R���g���[���[���g���C��ʂ�̊m�F���ł��܂��B
��SEC�i�o�v�l�o�́j�@���@���[�p�X�t�B���^�[�i�����ϊ��j�@��X9C�@���@�R���g���[���[�i�d������j���K����DC���[�^�[
�i�R���g���[���[�̃{�����[����X9C��u�������B�j
���́C����C���@�������玎���Ă݂悤�Ǝv���܂��B
�d���Ő��䂷������CDUTY��ŃR���g���[�������ɁC
��ᓮ��ɋ߂������ɂȂ邩���C�Ȃ�ċC�����Ă��܂����B
��SEC7�iPWM�o�́j���@���@�R���g���[���[�@���@�K����DC���[�^�[
�i�R���g���[���[��PWM�M���ړ����B�j
�̂ӂ��ʂ�̊m�F���ł��܂�Ǝv���܂��B
�����C�s�q����ɂ́C2�Ԗڂ̊m�F�́C�K�v�Ȃ������ł��ˁB
���`���[�p�X�t�B���^�[�i�A�i���O���j�`�A�}�]��PWM�R���g���[���[�iPWM���j
�����̕����͕s�v�Ɏv���܂����A�@���ł��傤���H
�͂��CAmazon�C�A���C�̃R���g���[���́C�����܂ł��C�e�X�g�̂��߂ŁCX9C�ƒu�����������܂������C�R���g���[���[�͕K�v����܂���B
SEC�������[�p�X�t�B���^�[�@�����@PIC��AD�ϊ��@�����@X9C�@�����@ML�S
�ł����邩������܂���B
���ꂩ��CLED�ł̊m�F�́C�ҋ����b�N����̂��������悤�ɁC
�����܂ł��CPIC�̓���̊m�F���Ǝv���܂��B
����PIC�̃v���O�������g���Ď��@�����삷�邩�ǂ����́C
���́C���̒i�K�̂悤�Ɏv���܂��B
�ҋ����b�N����C���낢�날�肪�Ƃ��������܂��B
�������CClosed loop�@�ɂ̓`�F�b�N�͓���܂����B
���낢�����Ă܂����C�ӂƁCSS����Ȃ��ŁC�p�������|�[�g�������ƁC�ǂ��Ȃ̂��C
�C�ɂȂ�o���܂����B
�p�������ł̊m�F�ƂȂ�ƁC�g���ĂȂ��f�X�N�g�b�v�C
�o���Ȃ���Ȃ�Ȃ��̂ŁC������Ɩʓ|�Ȃ̂ł����i�j�B
�����C�ʂȂe�d�s�C�����i���͂��܂����̂ŁC
�h���C�o�[�쐬���āC�������Ă݂����Ǝv���܂��B
mabo 2019/06/08(Sat) 18:31 No.1615 Re: ��7�[�o�v�l
�s�q����C�NjL�ł��B
�ҋ����b�N������������Ă�̂́C
�l�k�S�̃{�����[���̕����ɂ��Ă���R�{�̐��̂Ƃ���ɁC
��R�����ꂼ��Ȃ��Ō���Ƃ������Ƃ��Ǝv���܂��B
���Œ��R���Œ��R�ɒu�������Ă݂āC
���L�̂悤�ɂ���C�Ƃ������Ƃ��Ǝv���܂��B
�����₢��A����Ȃ��Ƃ�����K�v����܂���B
���Ⴆ���̉ϒ�R�̌��ɂȂ��Ă���3�{�̐��i����L5�ALg�ALout�Ƃ���Ɓj�A
���@10k�����x�̒�R���ALg��Lout���q������Ԃœ������H
���A10k���̒�R���AL5��Lout�Ɍq������Ԃœ������H
�ƌ��������ł��B�@�œ����Ȃ��ŁA�A��MAX�ʼn��Α��v�ł��B
���A�ŁA�ᑬ��]�⓮���Ȃ��̂Ȃ�ʖځA�Ƃ������ɂȂ邩���B
���@��������C������C���́C������o�v�l�̃R���g���[���[�ŁC����Ă݂܂��B
�ҋ����b�N������������Ă�̂́C
�l�k�S�̃{�����[���̕����ɂ��Ă���R�{�̐��̂Ƃ���ɁC
��R�����ꂼ��Ȃ��Ō���Ƃ������Ƃ��Ǝv���܂��B
���Œ��R���Œ��R�ɒu�������Ă݂āC
���L�̂悤�ɂ���C�Ƃ������Ƃ��Ǝv���܂��B
�����₢��A����Ȃ��Ƃ�����K�v����܂���B
���Ⴆ���̉ϒ�R�̌��ɂȂ��Ă���3�{�̐��i����L5�ALg�ALout�Ƃ���Ɓj�A
���@10k�����x�̒�R���ALg��Lout���q������Ԃœ������H
���A10k���̒�R���AL5��Lout�Ɍq������Ԃœ������H
�ƌ��������ł��B�@�œ����Ȃ��ŁA�A��MAX�ʼn��Α��v�ł��B
���A�ŁA�ᑬ��]�⓮���Ȃ��̂Ȃ�ʖځA�Ƃ������ɂȂ邩���B
���@��������C������C���́C������o�v�l�̃R���g���[���[�ŁC����Ă݂܂��B
mabo 2019/06/08(Sat) 18:39 No.1616 Re: ��7�[�o�v�l
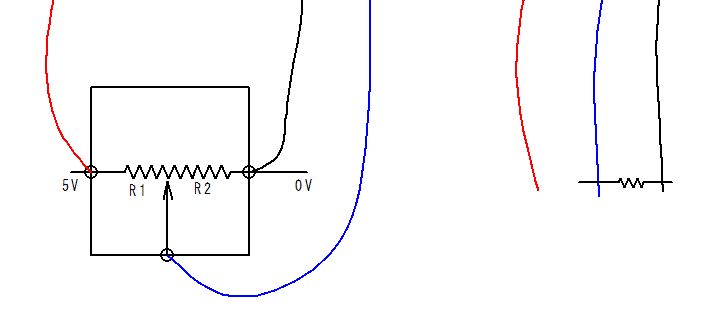 �Y�t�}�̂悤�ɁA���X���Ă���{�����[������3�{�O���āA
�Y�t�}�̂悤�ɁA���X���Ă���{�����[������3�{�O���āA�@�̃e�X�g�Ȃ�E�̐}�̂悤�ɐڑ����āA�i�c���1�{�͐}�̂悤�ɊJ���j
�X�s���h�����I���ɂ��ĉ������B
�A�͐�-�ԊԂɒ�R�ł��B
���ɂ͉������܂���B���̊O�����{�����[�����ǂ��������g�����Ȃ̂��̊m�F��Ƃł��B
> if (target >= x9c_val)x9c_up();
�ʖڂł��B
> if (target > x9c_val)x9c_up();
> �u�ڕW�l�v���u���݂̃��C�p�[�ʒu�v�����傫����A���C�p�[�ʒu��1������B
> �Ƃ����Ӗ��ł��B
�����l�Ȃ̂Ƀ��C�p�[�̈ʒu���グ����A�ڕW�ʒu���s���߂��܂���ˁH
�ڕW�ʒu�ɒB���Ă�����A�������܂���B
�ҋ����b�N 2019/06/08(Sat) 18:47 No.1617 Re: ��6�[�o�v�l
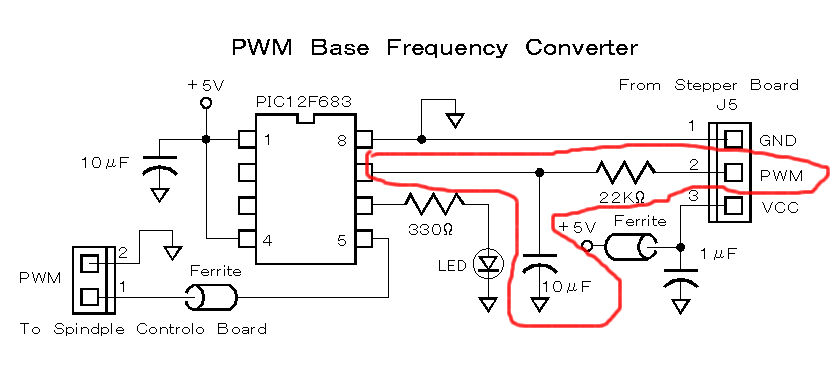 ����[�A�܂������������Ă��܂����\
����[�A�܂������������Ă��܂����\�����ł��B��̃A�i���O�Ɠ����ł��B
����ǂ��o�͍͂�������܂���B
�Ȃ̂ŁATR����̐}�̂悤�ɒ���X9C����X�s���h���ւƌq�����A
�����͎��̐}�̂悤�Ƀ{���e�[�W�t�H������H��ʂ��Ă�������̂��A
�Ǝv���Ă��܂����B
���X�s���h�����̉ϒ�R�̓d����5V�Ȃ̂ŁA�����A�����ł�ADC�ŎĂ���悤�ȋC������̂ŁA
���ڂł�������悤�ȋC�����܂��B
����ƁA���[�p�X�t�B���^�[��ʂ����g�`��No1543�ł��B
�t�B���^��ʂ��Ȃ���Γ��R�APWM��HIGH��LOW���J��Ԃ��g�`�ł��B�p�͑��������ł��傤���ǁB
���萔��������i22k���~10UF ��15�����~0.1UF�j���R�[�d���Ԃ������Ȃ镪�A���̔g�`���c��܂��B
�܂�A���{�A�g�������Ȃ�܂��B
���A�d�v�Ȃ̂́u�J�b�g�I�t�v���g���ł͖����A�܂�u�n�C�J�b�g�v�̕��ł͖����u���[�p�X�v�̔g�`�ł��B
����̗v���́A�u�n�C�̕����i�m�C�Y�j���J�b�g���āA�ǂ�����ă��[�M�������̂܂�荞�ނ��H�v�Ƃ����v���ł͂���܂���B
�g�͎��萔��傫���������قǏ[�d���ԂɎ��Ԃ������镪�A���ɋ߂Â��܂��B
���ł�10uF�̓d���R����0.1uF�̃Z���R���𗼕�����ƃX�p�C�N�������Ȃ邩���H
���ƁATR����̐}�ł́A�����������[�p�X�t�B���^�[���t���Ă܂��ǁH
�ҋ����b�N 2019/06/06(Thu) 09:37 No.1575
Re: ��6�[�o�v�l
�ҋ����b�N����A
x9c�̎g�����ł���
ud ��inc�ɂ�ad�ϊ���̒l���q���̂ł����H
�ł���I�y�A���v�͕s�p
�ł����H
x9c�̃f�[�^�V�[�g��a��ƃJ�E���^�[���Ƃ��o�ė��܂��B
�N���b�N�Ƃ��f�[�^�M���Ƃ��C�ɂȂ��ė��܂����B
pic�iad�l�o�͒l)�����x9c�֓n�����̂�8�r�b�g�̃f�[�^�M���ł����H
���ꂩ��A������mabo����́@�A���ɃX�s���h�����[�^�[�����Ƃ��Ă��܂����A�������Ⴂ�܂��B
�����AML4�̃X�s���h�����[�^�[�̃X�s�[�h�R���g���[���p�A�i���O�ϒ�R���f�W�^���|�e���V�������[�^�[�Ɋ������A���ʓI�ɃX�s���h�����[�^�[�𐧌䂷��B������A���܂���������Ə��ɓI�\�������Ă��܂��B
�ł��Amabo����́@�ASEC�����̐M�����X�s���h�����[�^�[�p�C���^�[�t�F�[�X�Ɍq���ƃJ�[�l���X�s�[�h��PWM��{���g���̐ݒ肪��肭�s���Ȃ��B�ǂ����Amach�̉�]���Ǝ��ۂ̃X�s���h�����[�^�[�̉�]�����ꗂ�����Ƃ��B
�ŁA���[�p�X�t�B���^�[��PWM���ς��āA�ēx�APWM�M�����o�����Ƃ��Ă���Ǝv���܂��B
�Ȃ̂ŁA�����̏ꍇ�A���[�p�X�t�B���^�[�͕s�p�ł��B
>���ڂł�������悤�ȋC�����܂��B
���̈Ӗ��́@�A�I�y�A���v������OK�Ƃ������Ƃł����H
x9c�̎g�����ł���
ud ��inc�ɂ�ad�ϊ���̒l���q���̂ł����H
�ł���I�y�A���v�͕s�p
�ł����H
x9c�̃f�[�^�V�[�g��a��ƃJ�E���^�[���Ƃ��o�ė��܂��B
�N���b�N�Ƃ��f�[�^�M���Ƃ��C�ɂȂ��ė��܂����B
pic�iad�l�o�͒l)�����x9c�֓n�����̂�8�r�b�g�̃f�[�^�M���ł����H
���ꂩ��A������mabo����́@�A���ɃX�s���h�����[�^�[�����Ƃ��Ă��܂����A�������Ⴂ�܂��B
�����AML4�̃X�s���h�����[�^�[�̃X�s�[�h�R���g���[���p�A�i���O�ϒ�R���f�W�^���|�e���V�������[�^�[�Ɋ������A���ʓI�ɃX�s���h�����[�^�[�𐧌䂷��B������A���܂���������Ə��ɓI�\�������Ă��܂��B
�ł��Amabo����́@�ASEC�����̐M�����X�s���h�����[�^�[�p�C���^�[�t�F�[�X�Ɍq���ƃJ�[�l���X�s�[�h��PWM��{���g���̐ݒ肪��肭�s���Ȃ��B�ǂ����Amach�̉�]���Ǝ��ۂ̃X�s���h�����[�^�[�̉�]�����ꗂ�����Ƃ��B
�ŁA���[�p�X�t�B���^�[��PWM���ς��āA�ēx�APWM�M�����o�����Ƃ��Ă���Ǝv���܂��B
�Ȃ̂ŁA�����̏ꍇ�A���[�p�X�t�B���^�[�͕s�p�ł��B
>���ڂł�������悤�ȋC�����܂��B
���̈Ӗ��́@�A�I�y�A���v������OK�Ƃ������Ƃł����H
TR 2019/06/06(Thu) 14:39 No.1576 Re: ��6�[�o�v�l
ud��inc�Ɍq���̂�PIC�̏o�́�����p�̃s���ł��B
> pic�iad�l�o�͒l)�����x9c�֓n�����̂�8�r�b�g�̃f�[�^�M���ł����H
�������A���̊Ԃ�x9c_up����x9c_down���ł��Bud�s�������킹�āA1�N���b�N����������邾���ł��B
> mach�̉�]���Ǝ��ۂ̃X�s���h�����[�^�[�̉�]��
PWM�͂����܂ł��d���������p�[�Z���g�q���A�Ƃ��������ł�����A�K���������[�^�[�̉�]���Ɣ��W�ɂ���Ƃ͌���܂���B
�������+�����ɂ����Ă������[�^�̑��x�͏オ��ł��傤���ǁB
��������]������ɂ́A���ۂ̉�]���x��ǂݎ���ăt�B�[�h�o�b�N������K�v������ł��傤�B
�܂�AMach�����PWM�͂����܂ŖڕW�l�ŁA����ɉ����āA���̑��x�ɉ�]����ǂݎ��Ȃ���㉺������A�Ƃ����������ƁB
��MABO����̎����́A�u���ۂ̉�]����Mach�Ɏ�荞�߂A������Mach�����PWM�o�͂��ω����Ă��̑��x�ɂ��Ă����v�Ƃ����@�\���Ǝv���̂ł����ǁA
������̕��Ɋ��҂��Ă��܂��B
���[�p�X�����邩����Ȃ����A�܂�A�f�W�^���œǂݎ�邩�A�A�i���O�ɂ��邩�͍D�݂̖��ł��B
���̍D�݂̓f�W�^���ł��B
���A�i���O�t�B���^�[������̂Ȃ�PIC�Ɍq�����ɂ��̂܂܃X�s���h���̉ϒ�R�ł�������Ǝv���܂��B
�Ƃ����̂́A�Q�l�T�C�g��PC����̏o�͂ŁATR�����MABO�����SS�{�[�h������ł��B
PC�̃J�[�l����25kHz�Ƃ��ł����ǁA����SS�{�[�h��4MHz�Ƃ��ł���ˁH���߂̎��g���A�Ⴆ��10kHz�Ƃ���LPF�������
����Ȃ�ɂȂ�Ǝv���܂��B
�ǂ��������Ȃ����ɂ��邩��TR����̖��ł�����A������͉��Ƃ������܂���B
> ���̈Ӗ��́@�A�I�y�A���v������OK�Ƃ������Ƃł����H
�����ł��B�����Ă����v�ȋC�͂��܂��B�ł����ۂɂ͎����Ă݂Ȃ��Ɣ���܂���B
> pic�iad�l�o�͒l)�����x9c�֓n�����̂�8�r�b�g�̃f�[�^�M���ł����H
�������A���̊Ԃ�x9c_up����x9c_down���ł��Bud�s�������킹�āA1�N���b�N����������邾���ł��B
> mach�̉�]���Ǝ��ۂ̃X�s���h�����[�^�[�̉�]��
PWM�͂����܂ł��d���������p�[�Z���g�q���A�Ƃ��������ł�����A�K���������[�^�[�̉�]���Ɣ��W�ɂ���Ƃ͌���܂���B
�������+�����ɂ����Ă������[�^�̑��x�͏オ��ł��傤���ǁB
��������]������ɂ́A���ۂ̉�]���x��ǂݎ���ăt�B�[�h�o�b�N������K�v������ł��傤�B
�܂�AMach�����PWM�͂����܂ŖڕW�l�ŁA����ɉ����āA���̑��x�ɉ�]����ǂݎ��Ȃ���㉺������A�Ƃ����������ƁB
��MABO����̎����́A�u���ۂ̉�]����Mach�Ɏ�荞�߂A������Mach�����PWM�o�͂��ω����Ă��̑��x�ɂ��Ă����v�Ƃ����@�\���Ǝv���̂ł����ǁA
������̕��Ɋ��҂��Ă��܂��B
���[�p�X�����邩����Ȃ����A�܂�A�f�W�^���œǂݎ�邩�A�A�i���O�ɂ��邩�͍D�݂̖��ł��B
���̍D�݂̓f�W�^���ł��B
���A�i���O�t�B���^�[������̂Ȃ�PIC�Ɍq�����ɂ��̂܂܃X�s���h���̉ϒ�R�ł�������Ǝv���܂��B
�Ƃ����̂́A�Q�l�T�C�g��PC����̏o�͂ŁATR�����MABO�����SS�{�[�h������ł��B
PC�̃J�[�l����25kHz�Ƃ��ł����ǁA����SS�{�[�h��4MHz�Ƃ��ł���ˁH���߂̎��g���A�Ⴆ��10kHz�Ƃ���LPF�������
����Ȃ�ɂȂ�Ǝv���܂��B
�ǂ��������Ȃ����ɂ��邩��TR����̖��ł�����A������͉��Ƃ������܂���B
> ���̈Ӗ��́@�A�I�y�A���v������OK�Ƃ������Ƃł����H
�����ł��B�����Ă����v�ȋC�͂��܂��B�ł����ۂɂ͎����Ă݂Ȃ��Ɣ���܂���B
�ҋ����b�N 2019/06/06(Thu) 15:21 No.1577 Re: ��6�[�o�v�l
�ҋ����b�N����A
���������A���̊Ԃ�x9c_up����x9c_down���ł��Bud�s�������킹�āA1�N���b�N����������邾���ł�
1�N���b�N�Ƃ�adcon���ɂ��l�i10�r�b�g�j�𑗂�N���b�N�M���ł����H
��PIC�Ɍq�����ɂ��̂܂܃X�s���h���̉ϒ�R�ł�������Ǝv���܂��B
�Ȃ�����
SEC�����x9c�`ML4�ł����H
���������A���̊Ԃ�x9c_up����x9c_down���ł��Bud�s�������킹�āA1�N���b�N����������邾���ł�
1�N���b�N�Ƃ�adcon���ɂ��l�i10�r�b�g�j�𑗂�N���b�N�M���ł����H
��PIC�Ɍq�����ɂ��̂܂܃X�s���h���̉ϒ�R�ł�������Ǝv���܂��B
�Ȃ�����
SEC�����x9c�`ML4�ł����H
TR 2019/06/06(Thu) 15:56 No.1578 Re: ��6�[�o�v�l
> 1�N���b�N�Ƃ�adcon���ɂ��l�i10�r�b�g�j�𑗂�N���b�N�M���ł����H
adcon��PIC�����̃��W�X�^�̎��ł���ˁH���X���������Ă�̂ł��傤?
adcon=����;
�Ƃ��ŁA����o���܂��B�킴�킴�s���̏グ����������K�v�͂���܂���B
1�N���b�N�̓s���́u�グ�����v�������́u�����グ�v�ł��B
X9C�̏ꍇ�͉��������ɃX�g���[�u����܂��B
> �Ȃ�����
> SEC�����x9c�`ML4�ł����H
�������A���[�p�X�ŃA�i���O�����āAXL4�ł��B
��̎Q�l�T�C�g�́A���̂܂܂�PWM�M�����X�s���h���̃h���C�o�ɓ���悤�Ƃ����A�̂ł����ǁA���g���̊W�ŁAPIC�̎��g���ϊ��{�[�h�����܂����B
���[�p�X�ŃA�i���O������͂�A���g���̊W��PC�i�p�������|�[�g�o�́j�ł͂����ł����ǁASS�{�[�h�Ȃ炢����̂ł́H
���X�A���[�p�X�ŃA�i���O�����āAPIC�ɓ����X9C�ł����ǁAPIC�̑O��X9C�̌�͓����d�ʂȂ�ł���ˁH
����Ȃ�A���̂܂܂ł�������Ǝv���܂��B10kHz�̔��ׂȔg���e�����y�ڂ��悤�ȋC�����܂���B
�܂��A���������Ă݂Ȃ��Ɣ���Ȃ����ł����ǁB
adcon��PIC�����̃��W�X�^�̎��ł���ˁH���X���������Ă�̂ł��傤?
adcon=����;
�Ƃ��ŁA����o���܂��B�킴�킴�s���̏グ����������K�v�͂���܂���B
1�N���b�N�̓s���́u�グ�����v�������́u�����グ�v�ł��B
X9C�̏ꍇ�͉��������ɃX�g���[�u����܂��B
> �Ȃ�����
> SEC�����x9c�`ML4�ł����H
�������A���[�p�X�ŃA�i���O�����āAXL4�ł��B
��̎Q�l�T�C�g�́A���̂܂܂�PWM�M�����X�s���h���̃h���C�o�ɓ���悤�Ƃ����A�̂ł����ǁA���g���̊W�ŁAPIC�̎��g���ϊ��{�[�h�����܂����B
���[�p�X�ŃA�i���O������͂�A���g���̊W��PC�i�p�������|�[�g�o�́j�ł͂����ł����ǁASS�{�[�h�Ȃ炢����̂ł́H
���X�A���[�p�X�ŃA�i���O�����āAPIC�ɓ����X9C�ł����ǁAPIC�̑O��X9C�̌�͓����d�ʂȂ�ł���ˁH
����Ȃ�A���̂܂܂ł�������Ǝv���܂��B10kHz�̔��ׂȔg���e�����y�ڂ��悤�ȋC�����܂���B
�܂��A���������Ă݂Ȃ��Ɣ���Ȃ����ł����ǁB
�ҋ����b�N 2019/06/06(Thu) 16:25 No.1579 Re: ��6�[�o�v�l
�ҋ����b�N����
���������A���[�p�X�ŃA�i���O�����āAXL4�ł��B
�悭������܂���
�Ȃ�����
SEC����烍�[�p�X�`ML4�ł����H
����ƁAss����SEC��̏ꍇ�A�}�b�n�̃J�[�l���X�s�[�h��PWM��{���g���̐ݒ�͕s�p�ł����H
�グ�����̌��͉��H
pic�[�q����o��M���̌��ł��B
���������܂��B
���������A���[�p�X�ŃA�i���O�����āAXL4�ł��B
�悭������܂���
�Ȃ�����
SEC����烍�[�p�X�`ML4�ł����H
����ƁAss����SEC��̏ꍇ�A�}�b�n�̃J�[�l���X�s�[�h��PWM��{���g���̐ݒ�͕s�p�ł����H
�グ�����̌��͉��H
pic�[�q����o��M���̌��ł��B
���������܂��B
TR 2019/06/06(Thu) 16:41 No.1581 Re: ��6�[�o�v�l
SEC��̎���Y��Ă��܂����B������Ɖ�H������Ȃ��̂ō����݁A���f�t���܂���B
SS�{�[�h����͐M���͎��Ȃ��̂ł��傤���H
> SEC����烍�[�p�X�`ML4�ł����H
���̒��ł�SS�{�[�h�����[�p�X��ML4�ł��B��R�ƃR���f���T���g�������ł��B
> �}�b�n�̃J�[�l���X�s�[�h��PWM��{���g���̐ݒ�͕s�p�ł����H
�ݒ�͓��R�K�v�ł��傤�B�̂ł�����B
���������A���X�̓X�s���h���p��PWM�o�͂��Ă��Ȃ���ł���ˁH
> �グ�����̌��͉��H
> pic�[�q����o��M���̌��ł��B
���Ƃ͉����Ă���̂ł����Hinc�s���Ɍq���[�q�H�M���́u��v�ł����H
����X9C�𐧌䂷��ׂɌq����PIC�̏o�͒[�q�ŁA�悪X9C��inc�s���ł��B
<�NjL���܂�>
���₢��ASS�{�[�h�̕��������Ă���킯�ł͂���܂���B
���ۂ̏��AMach�o�͂����M����SS�{�[�h��SEC����Ƃǂ̂悤�ɏo�͂����̂ł��傤���H
���������̂�5V�Ȃ̂��A���]�����̂��A�Ƃ����������ł��B
���ʂɁA���]���ꂸ��5V�ŏo�͂����̂Ȃ�ASS�{�[�h�ł�SEC��ł��ǂ���ł��ǂ��ł��B
SS�{�[�h����͐M���͎��Ȃ��̂ł��傤���H
> SEC����烍�[�p�X�`ML4�ł����H
���̒��ł�SS�{�[�h�����[�p�X��ML4�ł��B��R�ƃR���f���T���g�������ł��B
> �}�b�n�̃J�[�l���X�s�[�h��PWM��{���g���̐ݒ�͕s�p�ł����H
�ݒ�͓��R�K�v�ł��傤�B�̂ł�����B
���������A���X�̓X�s���h���p��PWM�o�͂��Ă��Ȃ���ł���ˁH
> �グ�����̌��͉��H
> pic�[�q����o��M���̌��ł��B
���Ƃ͉����Ă���̂ł����Hinc�s���Ɍq���[�q�H�M���́u��v�ł����H
����X9C�𐧌䂷��ׂɌq����PIC�̏o�͒[�q�ŁA�悪X9C��inc�s���ł��B
<�NjL���܂�>
���₢��ASS�{�[�h�̕��������Ă���킯�ł͂���܂���B
���ۂ̏��AMach�o�͂����M����SS�{�[�h��SEC����Ƃǂ̂悤�ɏo�͂����̂ł��傤���H
���������̂�5V�Ȃ̂��A���]�����̂��A�Ƃ����������ł��B
���ʂɁA���]���ꂸ��5V�ŏo�͂����̂Ȃ�ASS�{�[�h�ł�SEC��ł��ǂ���ł��ǂ��ł��B
�ҋ����b�N 2019/06/06(Thu) 17:09 No.1582 Re: ��6�[�o�v�l
�Ƃ肠�����A������x�}�ʂ��N�����܂��B
�ҋ����b�N����̎ʐ^�����āA���₷�����������܂��B
�ҋ����b�N����̎ʐ^�����āA���₷�����������܂��B
TR 2019/06/06(Thu) 19:18 No.1583 Re: ��6�[�o�v�l
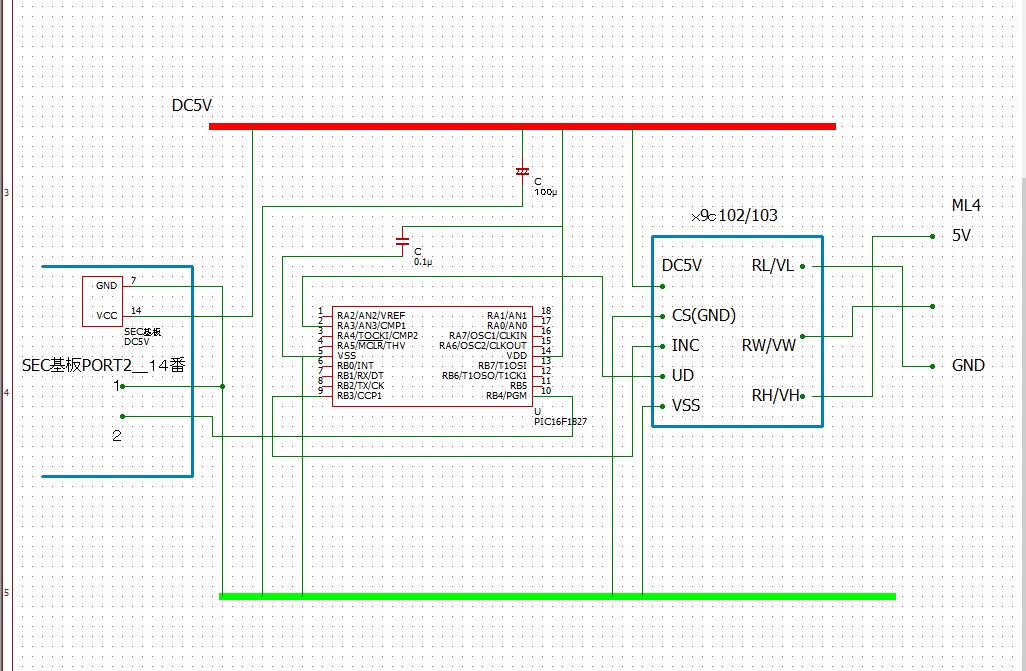 �ҋ����b�N����Amabo����A�����́B
�ҋ����b�N����Amabo����A�����́B�����A���X��103�i�P�O�����j���͂��܂����B
�����A�e�X�g�A���@�͎ʐ^�����ĉ������B
�\�z�ƈႤ��������܂����B
�ő�łTV�ƂȂ�Ƃ���A�S�D�TV�ł����B
157mv(min)�`4.5V�imax)
�v���O�����ł��傤���H
TR 2019/06/06(Thu) 20:43 No.1584 Re: ��6�[�o�v�l
�s�q����C�ҋ����b�N����C�����́B
�ҏP���b�N����C������Ղ�̃v���O�����C
���낢�날�肪�Ƃ��������܂��B
�̂�т�C�m���߂Ă݂悤�Ǝv���܂��B
�s�q����C���݂܂���C�v���Ⴂ������悤�Ȃ̂ŁC
�ēx�L�q���܂��B
���낢�����Ă܂����C���[�p�X�t�B���^�[�ƁC
�u���O�̋L���́C�����Ă��l�����������B
�o�v�l�����[�p�X�t�B���^�[�o�R���`�c�b�ϊ����o�́i�w�b�Q�X�j
�o�v�l���T���v�����O�i��{���g���̕ϊ��j���o�́i�o�v�l�j
�̗��������Ă��܂��B
���ő�łTV�ƂȂ�Ƃ���A�S�D�TV�ł����B
���������āC�ő哮�����Ă��c��@�S�O���H
�ɂ��ẮC�傫���ł����ˁB
���̕ӁC������ƁC�s���ł��B
�l�`�b�g�ւ̓��͂Əo�͂ɘ���������̂́C
�o�v�l�R���g���[���[�̂e�d�s�H�ɂɌ���������̂��ȁC
�Ȃ�ŁC�א����Ă܂��B
�����ŁC�e�d�s�ŁC�h���C�o�[���n�߂܂����B
�K���C�茳�ɁC2SC1815�@���@2SA1015�@���̃g�����W�X�^
����̂ŁC
http://srd.s43.xrea.com/Circuit_library.htm
�Q�l�ɁC�v�b�V���v����H���C�����Ȃ���n�߂܂����B
�ҏP���b�N����C������Ղ�̃v���O�����C
���낢�날�肪�Ƃ��������܂��B
�̂�т�C�m���߂Ă݂悤�Ǝv���܂��B
�s�q����C���݂܂���C�v���Ⴂ������悤�Ȃ̂ŁC
�ēx�L�q���܂��B
���낢�����Ă܂����C���[�p�X�t�B���^�[�ƁC
�u���O�̋L���́C�����Ă��l�����������B
�o�v�l�����[�p�X�t�B���^�[�o�R���`�c�b�ϊ����o�́i�w�b�Q�X�j
�o�v�l���T���v�����O�i��{���g���̕ϊ��j���o�́i�o�v�l�j
�̗��������Ă��܂��B
���ő�łTV�ƂȂ�Ƃ���A�S�D�TV�ł����B
���������āC�ő哮�����Ă��c��@�S�O���H
�ɂ��ẮC�傫���ł����ˁB
���̕ӁC������ƁC�s���ł��B
�l�`�b�g�ւ̓��͂Əo�͂ɘ���������̂́C
�o�v�l�R���g���[���[�̂e�d�s�H�ɂɌ���������̂��ȁC
�Ȃ�ŁC�א����Ă܂��B
�����ŁC�e�d�s�ŁC�h���C�o�[���n�߂܂����B
�K���C�茳�ɁC2SC1815�@���@2SA1015�@���̃g�����W�X�^
����̂ŁC
http://srd.s43.xrea.com/Circuit_library.htm
�Q�l�ɁC�v�b�V���v����H���C�����Ȃ���n�߂܂����B
mabo 2019/06/06(Thu) 22:05 No.1585 Re: ��6�[�o�v�l
mabo�����
���o�v�l�����[�p�X�t�B���^�[�o�R���`�c�b�ϊ����o�́i�w�b�Q�X�j
XC_�X���āA�Ȃ�ł����H
�����āAPWM�̑O�͂Ȃ��̂ł��傤���H�@�Z�̕������Ă��܂��B
�Z���o�v�l�����[�p�X�t�B���^�[�o�R���`�c�b�ϊ����o�́i�w�b�Q�X�j
XC_�X���āA�Ȃ�ł����H
���o�v�l�����[�p�X�t�B���^�[�o�R���`�c�b�ϊ����o�́i�w�b�Q�X�j
XC_�X���āA�Ȃ�ł����H
�����āAPWM�̑O�͂Ȃ��̂ł��傤���H�@�Z�̕������Ă��܂��B
�Z���o�v�l�����[�p�X�t�B���^�[�o�R���`�c�b�ϊ����o�́i�w�b�Q�X�j
XC_�X���āA�Ȃ�ł����H
TR 2019/06/06(Thu) 22:17 No.1586 Re: ��6�[�o�v�l
�f�[�^�V�[�g��
End-to-End Resistance, �}20%
���̂Q�O���������ł��傤���H
��发�̉p��͕ϊ�������A�Ӗ��s���Șa�o�Ă��܂��B�B
�㔭�ŁA�{���A�~����1������x9c102������̂�
�����Ă݂܂��B
End-to-End Resistance, �}20%
���̂Q�O���������ł��傤���H
��发�̉p��͕ϊ�������A�Ӗ��s���Șa�o�Ă��܂��B�B
�㔭�ŁA�{���A�~����1������x9c102������̂�
�����Ă݂܂��B
TR 2019/06/06(Thu) 22:43 No.1587 Re: ��6�[�o�v�l
�s�q����C�����́B
���݂܂���C�w�b�Q�X�́@�w�X�b�̊ԈႢ�ł��B
���̕����ł����C
���̊��ł́C
�@�r�r�i�|�[�g�Q�@�P�S�s���j���o�v�l
�@�r�d�b�i�ėp�o�́@�P�S�s���j���o�v�l
�@�o�b�i�V���A���P�[�u�������@�P�S�s���j���o�v�l
�ǂ�ł��C�o�v�l�̐M���m�F�ł��Ă܂��B�r�r�C�r�d�b�C�o�b�����ꂼ��C���ɓ�����Ǝv���܂��B
�v�́C�o�v�l�M�������o����Α��v�Ȃ̂ŁB
�����̂Ƃ���C�r�r�����邱�Ƃ������ł��B
�l�`�b�g�ɂ��r�r�ɂ��J�[�l���Ɗ�{���g���̐ݒ肠��܂��B
�����C�ǂ̂悤�ɁC�֘A���Ă�̂��́C�s���ł��B
�|�|�NjL�|�|
�@�w�X�b�ŁC���C�p�[�Œ[�܂œ������Ă��C��R���c��悤�Ȃ̂ŁC
�@�K�v�Ȃ�C�O���ɉ�H�i�Z���́j�t�������āC�o�h�b��
�R���g���[������悤���Ȃ��C�Ȃ�āC�����l���Ă܂����B
�@���̒�R���C�ō���]���ɁC�ǂ̂��炢�e�����邩�ł��傤�ˁB
���݂܂���C�w�b�Q�X�́@�w�X�b�̊ԈႢ�ł��B
���̕����ł����C
���̊��ł́C
�@�r�r�i�|�[�g�Q�@�P�S�s���j���o�v�l
�@�r�d�b�i�ėp�o�́@�P�S�s���j���o�v�l
�@�o�b�i�V���A���P�[�u�������@�P�S�s���j���o�v�l
�ǂ�ł��C�o�v�l�̐M���m�F�ł��Ă܂��B�r�r�C�r�d�b�C�o�b�����ꂼ��C���ɓ�����Ǝv���܂��B
�v�́C�o�v�l�M�������o����Α��v�Ȃ̂ŁB
�����̂Ƃ���C�r�r�����邱�Ƃ������ł��B
�l�`�b�g�ɂ��r�r�ɂ��J�[�l���Ɗ�{���g���̐ݒ肠��܂��B
�����C�ǂ̂悤�ɁC�֘A���Ă�̂��́C�s���ł��B
�|�|�NjL�|�|
�@�w�X�b�ŁC���C�p�[�Œ[�܂œ������Ă��C��R���c��悤�Ȃ̂ŁC
�@�K�v�Ȃ�C�O���ɉ�H�i�Z���́j�t�������āC�o�h�b��
�R���g���[������悤���Ȃ��C�Ȃ�āC�����l���Ă܂����B
�@���̒�R���C�ō���]���ɁC�ǂ̂��炢�e�����邩�ł��傤�ˁB
mabo 2019/06/06(Thu) 22:50 No.1588 Re: ��6�[�o�v�l
mabo�����
�ȁ`�A���łɁAx9c��������������ł��ˁI�I
�v���O�����͂ǂ����Ă����̂ł����H
�A���f�B�[�m�ł������H
�A���f�B�[�m�Ȃ�A��B�҂��v���O����������悤�ł��ˁB
���Q�l�ɂȂ��ꂽ�̂ł��傤���H
�����̒�R���C�ō���]���ɁC�ǂ̂��炢�e�����邩�ł��傤�ˁB
����ꂽ��A���̒ʂ�ł��ˁB
����ŁA�Ƃ肠�����AML4�̃X�s���h�����[�^�[�͉����ł��B
�ȁ`�A���łɁAx9c��������������ł��ˁI�I
�v���O�����͂ǂ����Ă����̂ł����H
�A���f�B�[�m�ł������H
�A���f�B�[�m�Ȃ�A��B�҂��v���O����������悤�ł��ˁB
���Q�l�ɂȂ��ꂽ�̂ł��傤���H
�����̒�R���C�ō���]���ɁC�ǂ̂��炢�e�����邩�ł��傤�ˁB
����ꂽ��A���̒ʂ�ł��ˁB
����ŁA�Ƃ肠�����AML4�̃X�s���h�����[�^�[�͉����ł��B
TR 2019/06/06(Thu) 23:09 No.1589 Re: ��6�[�o�v�l
�ҋ����b�N�����
�ق������ƌf���ł̂����͓���ł��ˁB
�\����Ȃ��ł��B
����̃v���O�����ŁA�S��A�Ⴕ���͂W��Ŋ����Ă��܂����A
SEC��ƌq���ꍇ�ASEC�����̐M���ɂ́A
����͂Ȃ��ł��傤����A���[�p�X�t�B���^�[�͕s�v�A
�����Ȃ�ƁA
�S��Ƃ��Ŋ���K�v�́A�{���Ȃ��̂ł��傤���H
�v���O������T�O�O�ʂƂȂ��Ă���̂ŁA�S��T���v�����O�ɖ߂��܂����B
���ς��Ƃ邱�Ǝ��́A�������Ƃ��Ǝv���܂��B
�ق������ƌf���ł̂����͓���ł��ˁB
�\����Ȃ��ł��B
����̃v���O�����ŁA�S��A�Ⴕ���͂W��Ŋ����Ă��܂����A
SEC��ƌq���ꍇ�ASEC�����̐M���ɂ́A
����͂Ȃ��ł��傤����A���[�p�X�t�B���^�[�͕s�v�A
�����Ȃ�ƁA
�S��Ƃ��Ŋ���K�v�́A�{���Ȃ��̂ł��傤���H
�v���O������T�O�O�ʂƂȂ��Ă���̂ŁA�S��T���v�����O�ɖ߂��܂����B
���ς��Ƃ邱�Ǝ��́A�������Ƃ��Ǝv���܂��B
TR 2019/06/07(Fri) 06:35 No.1590 Re: ��6�[�o�v�l
�s�q����C���͂悤�������܂��B
�����B�w�X�b�̎��@�͎茳�ɂ܂�����܂���̂ŁC
�k�d�c�̃V���~���[�V�������Ă܂����B
�����̘A���͂���܂������C�܂��C�͂��Ă��܂���B
���ꂩ��C��B�́@arduino�@�̃v���O�������݂܂������C
�������������C���C�u�����[�ɂȂ��Ă��āC������ƕ�����܂���ł����B
���ꂩ��C�s�q����C���[�p�X�t�B���^�[�́C
�M���ɗ��ꂪ���邩������̂ł͂Ȃ��C
����́C�`�c�ϊ��Ŏ�邽�߂ł��B
���[�p�X�t�B���^�[���g��Ȃ��̂ł���C
�ҋ����b�N���C��ŏ����Ă��ꂽ�悤�ȁC
�T���v�����O�̃v���O�����ŁC�o�v�l�̂c�t�s�x��ׂ�K�v����Ǝv���܂��B
�@�o�v�l�o�́������[�p�X�t�B���^�[�i�o�v�l�̂c�t�s�x�̕ω����d���̑召�ɕϊ��j�����w�X�b�̒�R�ɕϊ�
�@�o�v�l�o�́����T���v�����O�i�o�v�l�̂c�t�s�x�̕ω����T���v�����O�Ŏ��c�t�s�x����v�Z�j�����w�X�b�̒�R�ɕϊ�
�݂����ɂȂ�Ǝv���܂��B���[�p�X�t�B���^�[�Ȃ��̂o�v�l�M�����C�`�c�ϊ��Ŏ����ƂȂ��̂ŁC
�ǂ��Ȃ邩�́C�킩��܂��C���������āC�c�t�s�x�̕ω�����邱�Ƃł��Ȃ���������Ȃ��Ǝv���܂��B
�����B�w�X�b�̎��@�͎茳�ɂ܂�����܂���̂ŁC
�k�d�c�̃V���~���[�V�������Ă܂����B
�����̘A���͂���܂������C�܂��C�͂��Ă��܂���B
���ꂩ��C��B�́@arduino�@�̃v���O�������݂܂������C
�������������C���C�u�����[�ɂȂ��Ă��āC������ƕ�����܂���ł����B
���ꂩ��C�s�q����C���[�p�X�t�B���^�[�́C
�M���ɗ��ꂪ���邩������̂ł͂Ȃ��C
����́C�`�c�ϊ��Ŏ�邽�߂ł��B
���[�p�X�t�B���^�[���g��Ȃ��̂ł���C
�ҋ����b�N���C��ŏ����Ă��ꂽ�悤�ȁC
�T���v�����O�̃v���O�����ŁC�o�v�l�̂c�t�s�x��ׂ�K�v����Ǝv���܂��B
�@�o�v�l�o�́������[�p�X�t�B���^�[�i�o�v�l�̂c�t�s�x�̕ω����d���̑召�ɕϊ��j�����w�X�b�̒�R�ɕϊ�
�@�o�v�l�o�́����T���v�����O�i�o�v�l�̂c�t�s�x�̕ω����T���v�����O�Ŏ��c�t�s�x����v�Z�j�����w�X�b�̒�R�ɕϊ�
�݂����ɂȂ�Ǝv���܂��B���[�p�X�t�B���^�[�Ȃ��̂o�v�l�M�����C�`�c�ϊ��Ŏ����ƂȂ��̂ŁC
�ǂ��Ȃ邩�́C�킩��܂��C���������āC�c�t�s�x�̕ω�����邱�Ƃł��Ȃ���������Ȃ��Ǝv���܂��B
mabo 2019/06/07(Fri) 09:00 No.1591 Re: ��6�[�o�v�l
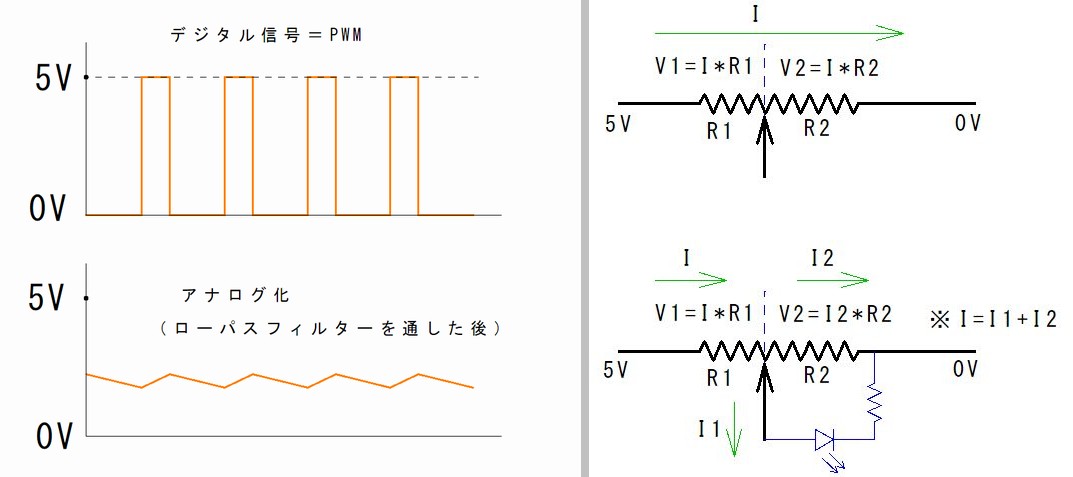 > SEC�����̐M���ɂ́A����͂Ȃ��ł��傤����
> SEC�����̐M���ɂ́A����͂Ȃ��ł��傤�������ꂪ�����̈Ӗ����Ⴂ�܂��B
�Y�t�}�̂悤�ȃf�W�^���g�`�ŁA�p���Y��A�Ƃ������������Ӗ��ł��B
�A�i���O�������火�̂悤�Ȕg�`�ɂȂ�܂��B
Mach����́��̔g�`�ŁAHIGH��LOW�̊����ʼn�]���x��m�点�܂��B
MAX��10000��]�Őݒ肵�āAS8000��G�R�[�h�ɂ�����HIGH��4�ɑ���LOW��1�̊����ŏo�͂���܂��B�܂�A���x��MAX�ݒ�ɂ���������m�点�܂��B
������ǂ��������邩�͗��p�҂̖��ł��B
PC(MACH)�����PWM�̓f�W�^���ł�����A�A�i���O�ϊ����Ȃ��̂Ȃ�f�W�^���Ŏ܂��B
�A�i���O�ϊ������̂Ȃ�ADC�Ŏ܂��B
�ܘ_�A�f�W�^���M�����A�A�i���O�ŎăT���v�����𑝂₵�āA���ς��o���Ώo���܂����ǁA
�f�W�^���ł���������ǂ��ł��B
�i����M����1023�t�߂�0�t�߂Ȃ̂�1��0�ɂȂ邩�̈Ⴂ�ŁA�����c��オ�邩�ǂ����̈Ⴂ�ł��j
> 157mv(min)�`4.5V�imax)
0.157V�Ȃ̂ŁA3.14����300�����x�ł��ˁB
�f�[�^�V�[�g�ł͗��[��40����max100���ł�����2���C�p�[���ʂ͂��������ł��ˁB
Max�ł�1k�����x�ł��ˁB
max�̕��ł����ǁA��̉摜��LED��t���Ă��܂���ˁH
�����2�d�̈Ӗ��őʖڂł��B
1��X9C�̓����ł��B
X9C�̏o�͎͂ア�̂�LED�ڌ��点��\�͂͂���܂���B
�܂�A���ꂾ���̓d���𗬂������_�ŏo�͒[�q�̓d���͋����܂��B
���点�����Ȃ�A�{���e�[�W�t�H���A�ł�����Ă��̐�Ō��点�Ă��������B�B
�����āA������͓d�C�̓����i�I�[���̖@���j�ł��B(�Y�t�}���Q�Ɓj
���ϒ�R���͗����̒�R�l�̊����œd���l���o���܂��B�ł�����͓����d���𗼑��������ł��B
�@V=I*R�̃I�[���̖@���ŁAI����肾����R1�FR2��V1:V2�ɂȂ�̂ł��B
�@�Ȃ̂ŁA�Y�t�}�Ł������ɓd���𗬂����炢���܂���B�Ƃ������A�����Ε����̊W������܂�����
�@�i�}�Ō�����I*R1:I2*R2�̊W�ɂȂ�j�A���R�{�����[���ʒu�̒l�ɂ͂Ȃ�܂���B
�v���O�����I�ɋC�ɂȂ��Ă���͍̂ŏ��̏����������ł��B������1���C�p�[�����������Ȃ�\��������܂��B
> //�f�o�C�X��������
> void x9c_init(void) {
> ud = 0;
> for (char i = 0; i < 99; i++) {
> inc = 0;
> __delay_us(1);
> inc = 1;
> __delay_us(500);
> }
> x9c_val = 0;
> }
for (char i = 0; i < 100; i++) {
��99��100�ɕύX���Ă����Ă��������B
�����̑O�Ƀs���̏�������inc�s����HIGH�ɂ��Ă���Ζ�薳���̂ł����ǁALOW�ŏ����������ꍇ��
�ŏ���1��͓����܂���B
�ܘ_���̍ŏ���
inc = 1;
__delay_us(2);
��t���Ă��ǂ��ł��B
�ҋ����b�N 2019/06/07(Fri) 09:53 No.1592 Re: ��6�[�o�v�l
mabo����A�L���������܂��B
�������A�o��14�Ԃ����PWM���A�S�`���S�`���ɂȂ��Ă܂����B
���[�p�X�t�B���^�[�̃R���f���T�[�͓d���R���f���T�[�ŁA10�}�C�N���ł����H
�������A�o��14�Ԃ����PWM���A�S�`���S�`���ɂȂ��Ă܂����B
���[�p�X�t�B���^�[�̃R���f���T�[�͓d���R���f���T�[�ŁA10�}�C�N���ł����H
TR 2019/06/07(Fri) 10:06 No.1593 Re: ��6�[�o�v�l
�ҋ����b�N����
�����ɂ͘b���������܂��B
>�f�W�^���ł���������ǂ��ł��B
�i����M����1023�t�߂�0�t�߂Ȃ̂�1��0�ɂȂ邩�̈Ⴂ�ŁA�����c��オ�邩�ǂ����̈Ⴂ�ł��j
SEC���~pic~x9c~ML4
�A�i���O�ϒ�R��x9c�Ɋ����������ł��B�@���̌q�����������߁H
>Max�ł�1k�����x�ł��ˁB
�ǂ���Max�ł�1k�����x�ł����H
�����ɂ͘b���������܂��B
>�f�W�^���ł���������ǂ��ł��B
�i����M����1023�t�߂�0�t�߂Ȃ̂�1��0�ɂȂ邩�̈Ⴂ�ŁA�����c��オ�邩�ǂ����̈Ⴂ�ł��j
SEC���~pic~x9c~ML4
�A�i���O�ϒ�R��x9c�Ɋ����������ł��B�@���̌q�����������߁H
>Max�ł�1k�����x�ł��ˁB
�ǂ���Max�ł�1k�����x�ł����H
TR 2019/06/07(Fri) 11:22 No.1594 Re: ��6�[�o�v�l
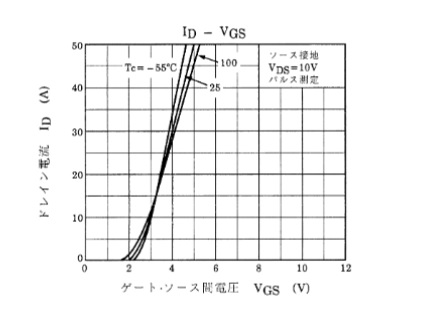 �s�q����C�����ł��B
�s�q����C�����ł��B���́C���Z�̂g�o�Ɠ����C
�@�@�Q�Q����
�@�@�P�O�ʂe
���g���Ă��܂����B
�ҋ����b�N����C�ʌ��Ȃ̂ł����C�e�d�s�́C�ȂV�r�A�Ȃ�ł��ˁB
�����悭������Ȃ��̂ł����CID-VGS�����@�Ȃ�\���݂�ƁC
������O�ł��傤���ǁC�����Ȃ��̂������ł��ˁB
�Y�t�̂悤�ȓ�����FET�̕����CPWM���ŃR���g���[������ɂ́C
�����Ă����ł��傤�ˁB
mabo 2019/06/07(Fri) 11:24 No.1595 Re: ��6�[�o�v�l
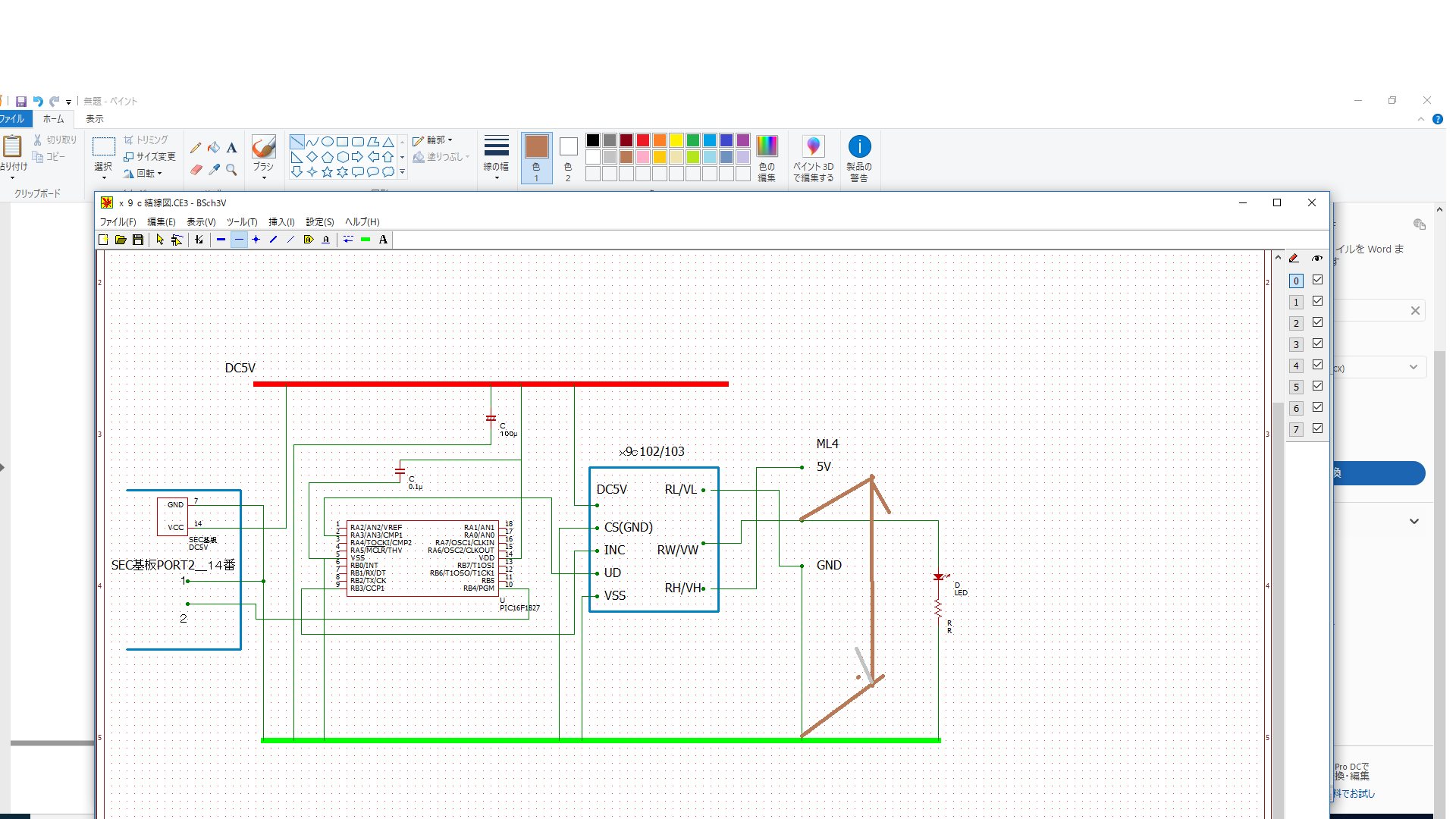 �ҋ����b�N�����
�ҋ����b�N������v�����@��`���܂��B
�d���͊m���ɊԈႢ�ł����B
�ł��A��R�l���v�����Ă��܂����B
300���`8.51�����ł����B
���F���̊Ԃł��B
TR 2019/06/07(Fri) 12:46 No.1596
- JoyfulNote v6.02 -
++ Edited by Hamel ++