 Home
Home Item
Item �V�K���e
�V�K���e �A���o��
�A���o�� ���[�h����
���[�h���� �ߋ����O
�ߋ����O Topic
Topic Notice
Notice Admin
Admin
48���Ԉȓ��̋L����  �ŕ\������܂�
�ŕ\������܂�
�ŕ\������܂�
No1238����
 �m��1238����̑����ł��B
�m��1238����̑����ł��B�ҋ����b�N����A�����́B
�����x�̍l�����́APC�Ɠ����ł��B
�ʏ�A4MHz�쓮�Ȃ�1MHz�쓮��4�{���������Ă��܂�����A1MHz��4MHz�Ƃ����
���쎞�Ԃ�1/4�ɂȂ�܂��B
��͂肻���ł������B
���iPIC�N���b�N�̎����j�ƁiTosc�j�͓���ł��B
Fosc�u���g���v=1/Tosc�@�ł��B
�ŁA
TAD���u1.6us�`6.4us�̊ԂɂȂ�悤�Ɂv�{����I������A�ƌ������ł��B
1MHz�쓮�Ȃ�Tosc��1us�ł��B�����Đݒ�ł���{���́A1,2,4,8�A�c�Ȃ̂ŁA
2��4��I�����鎖�ɂȂ�܂��B
�Ȃ�قǁI
�L��������܂����B
16�e1827�ł����A
16�e1823�̃f�[�^�V�[�g�Ǝ��Ă��銴���ł��B
�����l�͌������Ȃ������ł����ǁA�Ⴆ�A0.8us�`6.4us�̂悤�ɑ������x�̂ق����L�������̂��Ǝv���܂��B
���{��ł��݂�ƁA�Ԋ|���������������A�����l�ŁA1.0�`4.0��second�@�ƂȂ��Ă��܂����ˁH
�����AFRC���ĉ����낤�H
RC�͂����炭�A��R�ƃR���f���T���g���ăN���b�N�M�����O������鎖���Ǝv���Ă����̂ł����B
 TR
TR  2018/11/22(Thu) 19:09
2018/11/22(Thu) 19:09 Re: No1238����
16F1823��16F1827�͓����V���[�Y�i�t�@�~���j�ł��B�Ȃ̂ŁA���Ƃ��Ă͖w�Nj��ʂ��Ă��܂��B
�Ȃ̂ŁA���Ȃ�̕����������������Ǝv���܂��B
�ł��A�f�[�^�V�[�g���܂Ƃ߂��Ȃ������Ƃ������́A����Ȃ�̈Ⴂ�����݂���Ƃ������Ƃł��傤�B
> �Ԋ|���������������A�����l�ŁA1.0�`4.0��second�@�ƂȂ��Ă��܂����ˁH
�����ł��B�������琄�����܂����B16F88�Ō�����2�`4us�������ƂȂ�܂��B
�ł��A�ݒ�ł��Ȃ��A�Ƃ��ł͖����A����l�͕ۏ��Ȃ���A�ƌ������Ȃ̂ŁA
�쓮�N���b�N��ύX�����Ƃ��ɂ́A�G���[�������A�͈͊O�ɏo�Ă��܂��\��������܂��B
FRC�͒P���ɁA������RC�\���̔��M��H���g��������FREQUENCY�Ƃ����Ӗ��ł��傤�ˁB
�Ȃ̂ŁA���Ȃ�̕����������������Ǝv���܂��B
�ł��A�f�[�^�V�[�g���܂Ƃ߂��Ȃ������Ƃ������́A����Ȃ�̈Ⴂ�����݂���Ƃ������Ƃł��傤�B
> �Ԋ|���������������A�����l�ŁA1.0�`4.0��second�@�ƂȂ��Ă��܂����ˁH
�����ł��B�������琄�����܂����B16F88�Ō�����2�`4us�������ƂȂ�܂��B
�ł��A�ݒ�ł��Ȃ��A�Ƃ��ł͖����A����l�͕ۏ��Ȃ���A�ƌ������Ȃ̂ŁA
�쓮�N���b�N��ύX�����Ƃ��ɂ́A�G���[�������A�͈͊O�ɏo�Ă��܂��\��������܂��B
FRC�͒P���ɁA������RC�\���̔��M��H���g��������FREQUENCY�Ƃ����Ӗ��ł��傤�ˁB
 �ҋ����b�N 2018/11/22(Thu) 22:47 No.1240
�ҋ����b�N 2018/11/22(Thu) 22:47 No.1240 Re: No1238����
 �ҋ����b�N����A�F�X�Ƃ��������܂��ėL��������܂��B
�ҋ����b�N����A�F�X�Ƃ��������܂��ėL��������܂��B�o�h�b�͏��S�҂ɂƂ��Ĉ������炢�ƌ����Ă��܂������A
�o�h�b�̃f�[�^�V�[�g��������Ȃ��Ɩ{���ɓ���Ǝv���܂��B
�����ŁA�e1827�����Ƃɂ��܂����B�e1823�̓f�[�^�V�[�g�̓��{��ł�����̂�
�{���́A�e1823���Ȃ̂�������܂��A�o�h�m�������Ȃ���ł���ˁB
�����ɂe1827���Ă݂āA���܂ŋ�����������f�[�^�V�[�g�����Ȃ���A
������x�A����Ă݂܂��B
�o�h�b�ɂ͂s�����������O�C�P�C�Q��3����ƁA���ȏ��ɗL��܂��B
�ł��A�o�v�l���W���[�����g���ꍇ�A���́A�s���������Q���g���̂��m��܂���ł������A
�f�[�^�V�[�g�ɂ���܂����B
��͂�A���{��̃f�[�^�V�[�g����ɂ��Ȃ���A�����Ē������v���O������������x�A����Ă݂�̂��ǂ��Ǝv��������ł��B
TR 2018/11/23(Fri) 08:21 Re: No1238����
PIC�Ȃ�A���̃V���[�Y��I������̂���Ԃ����悤�ȋC�����܂��B
�Ƃ����̂́A�L���ł����Ă��A���܂�ɌÂ����ƁA
�E�R���p�C�����قȂ�
�E�Â����ƂȂ�̂ō폜�����
�Ƃ�������ɂȂ��āAXC�̗��������̂�����ɂȂ�܂��B
�܂��A�ŐV(�ƌ����Ă��A�H���Ŕ�������Ă���2,3�N�ȓ��j�̐��Ə�̂����Ȃ�������A
�܂�5���̂��̂�A�A�i���O�@�\���L�x�Ȃ��̂͂����ƕ��G�ɂȂ��Ă���̂ŁA��肠�����~�߂������ǂ��ł��B
���}�C�R���Ƃ��đE�߂Ȃ��̂ł͂Ȃ��A�����������@�\���g���������Ɏg���n�߂�Ηǂ��A�Ƃ������ł��B
�ŁA���̃V���[�Y�i�t�@�~���j�́A�x�[�V�b�N�ȃ��C���ɂ���}�C�R���ŁA���ʂȕ�������������
���݂̕W���I�ȋ@�\�͂����Ƒ����Ă��܂��B
�܂��AF88��F627A���x�[�V�b�N�ȃ��C���ł����ǂȂ̂ł����ǁA�����I�ɂ͈��ނ��T���Ă���}�C�R���A�Ƃ����}�C�R���ł��B
F1827�Ȃ�A�J���̌��ɋ����錻���̃}�C�R���ł��傤�B���i���������i�ł��B
��F1827�Ȃ珊�L���Ă��܂��BF88��F627A�͂�����Ɣ����C�ɂ͂Ȃ�܂���ł����B
�����A���{��f�[�^�V�[�g������Ƃ͂����AF627A��F88�Ɣ�ׂ�ƁA�}�C�R��(���W�X�^)�Ƃ��Ă͑������G�ɂȂ��Ă��܂��B
�Ƃ����̂́A�L���ł����Ă��A���܂�ɌÂ����ƁA
�E�R���p�C�����قȂ�
�E�Â����ƂȂ�̂ō폜�����
�Ƃ�������ɂȂ��āAXC�̗��������̂�����ɂȂ�܂��B
�܂��A�ŐV(�ƌ����Ă��A�H���Ŕ�������Ă���2,3�N�ȓ��j�̐��Ə�̂����Ȃ�������A
�܂�5���̂��̂�A�A�i���O�@�\���L�x�Ȃ��̂͂����ƕ��G�ɂȂ��Ă���̂ŁA��肠�����~�߂������ǂ��ł��B
���}�C�R���Ƃ��đE�߂Ȃ��̂ł͂Ȃ��A�����������@�\���g���������Ɏg���n�߂�Ηǂ��A�Ƃ������ł��B
�ŁA���̃V���[�Y�i�t�@�~���j�́A�x�[�V�b�N�ȃ��C���ɂ���}�C�R���ŁA���ʂȕ�������������
���݂̕W���I�ȋ@�\�͂����Ƒ����Ă��܂��B
�܂��AF88��F627A���x�[�V�b�N�ȃ��C���ł����ǂȂ̂ł����ǁA�����I�ɂ͈��ނ��T���Ă���}�C�R���A�Ƃ����}�C�R���ł��B
F1827�Ȃ�A�J���̌��ɋ����錻���̃}�C�R���ł��傤�B���i���������i�ł��B
��F1827�Ȃ珊�L���Ă��܂��BF88��F627A�͂�����Ɣ����C�ɂ͂Ȃ�܂���ł����B
�����A���{��f�[�^�V�[�g������Ƃ͂����AF627A��F88�Ɣ�ׂ�ƁA�}�C�R��(���W�X�^)�Ƃ��Ă͑������G�ɂȂ��Ă��܂��B
�ҋ����b�N 2018/11/23(Fri) 13:54 No.1242 �`�c�q�d�r
��������̂ŐV�������e���܂����B
>RB3��2*tmp[ms]��HIGH�A��RB3��2*tmp[ms]��LOW�ɂ���
�ς݂܂���B
��������������Ղ������ĉ������B���肢���܂��B
return���@�L��������܂��B
�`�c�q�d�r�́A�ϐ��錾�őΏ����܂������B
//�ϐ��錾
unsigned int Value;
Value=(ADRESH<<8)+ ADRESL;
__delay_us(20); //�A�N�B�W�������ԁ@20us
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (Value);
>RB3��2*tmp[ms]��HIGH�A��RB3��2*tmp[ms]��LOW�ɂ���
�ς݂܂���B
��������������Ղ������ĉ������B���肢���܂��B
return���@�L��������܂��B
�`�c�q�d�r�́A�ϐ��錾�őΏ����܂������B
//�ϐ��錾
unsigned int Value;
Value=(ADRESH<<8)+ ADRESL;
__delay_us(20); //�A�N�B�W�������ԁ@20us
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (Value);
TR 2018/11/18(Sun) 07:08 Re: �`�c�q�d�r
�u�s�����Ƃ��Ă��鎖�̓{�����[���ɑΉ������_�Łv�Ȃ̂ł�����A�ʏ��
�{�����[���iADC�j�l�~��{����_��/�������ԁA�ɂ��悤�Ƃ��܂���ˁH
�{�����[���l��1000�Ȃ�2�b�A100�Ȃ�0.2�b�A�ƂȂ�悤�ɂ���Ȃ��{����2�ɂ��܂��B
�Ȃ̂ŁA�ʏ��2ms�̃f�B���C��1000��A������100��s���Ď��Ԃ����킹�܂��B
RB3=1;
for(i=0;i<tmp;i++)__delay_ms(2);
���ƁA__delay_ms(2);��tmp��s���܂��B
> for(i = 0; i<tmp; i++){RB3=1;}
���ƁAtmp��ARB3=1;���s���܂��B�i���̏������Ԃ�T�Ƃ��܂��B�j
�������s��
__delay_ms(2);
�ł��B
�܂�ARB3��1�̎��Ԃ́uT+2ms�v�Ƃ������ƂɂȂ�܂��B
T�̓{�����[���l�ɔ�Ⴕ�܂����ǁA�Ӗ��̂Ȃ�2ms���t���܂��B
for(i = 0; i<tmp*50; i++)RB3=1;
for(i = 0; i<tmp*50; i++)RB3=0;
�̂悤�ɁA�K���Ȕ{���s�������{�����[���̐ݒ�l�Ɠ_�ŊԊu�̓�������v���܂��B
����ǂ��A1���[�v�ʼn��N���b�N�����邩�́A���S�҂ɂ͔��f�t���ɂ����Ǝv���܂��B
�����ہA���̃v���O�����ł͓_�Ŏ��Ԃ��������܂���ł������H
> Value=(ADRESH<<8)+ ADRESL;
> __delay_us(20); //�A�N�B�W�������ԁ@20us
> ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
> while(ADCON0bits.GO_DONE); //�ϊ������҂�
> return (Value);
����͊Q��������������܂��Lj����v���O�����ł��B
�擪�ŁA�܂�ADC���n�߂Ă������Ȃ��̂�
Value=(ADRESH<<8)+ ADRESL;
��ADC���ʃ��W�X�^�̒l���擾���Ă���ADC�ϊ����J�n���Ă��܂��B
���ۂ̏��A����͑O��s����ADC�̒l�����W�X�^�Ɏc���Ă���ł��傤���炻�ꂪ�o�͂���܂��B
�����ƍ���̒l��Ԃ������Ȃ�ϊ��������l���擾�Ƃ�����������Ă��������B
����̏ꍇ�͋C�t���Ȃ����x�ɒx��邾���ł����ǁA���ꂪ�v�Z�Ȃ�A�v�Z�������Ɍ��ʂ�Ԃ��悤�Ȏ��ł��B
�{�����[���iADC�j�l�~��{����_��/�������ԁA�ɂ��悤�Ƃ��܂���ˁH
�{�����[���l��1000�Ȃ�2�b�A100�Ȃ�0.2�b�A�ƂȂ�悤�ɂ���Ȃ��{����2�ɂ��܂��B
�Ȃ̂ŁA�ʏ��2ms�̃f�B���C��1000��A������100��s���Ď��Ԃ����킹�܂��B
RB3=1;
for(i=0;i<tmp;i++)__delay_ms(2);
���ƁA__delay_ms(2);��tmp��s���܂��B
> for(i = 0; i<tmp; i++){RB3=1;}
���ƁAtmp��ARB3=1;���s���܂��B�i���̏������Ԃ�T�Ƃ��܂��B�j
�������s��
__delay_ms(2);
�ł��B
�܂�ARB3��1�̎��Ԃ́uT+2ms�v�Ƃ������ƂɂȂ�܂��B
T�̓{�����[���l�ɔ�Ⴕ�܂����ǁA�Ӗ��̂Ȃ�2ms���t���܂��B
for(i = 0; i<tmp*50; i++)RB3=1;
for(i = 0; i<tmp*50; i++)RB3=0;
�̂悤�ɁA�K���Ȕ{���s�������{�����[���̐ݒ�l�Ɠ_�ŊԊu�̓�������v���܂��B
����ǂ��A1���[�v�ʼn��N���b�N�����邩�́A���S�҂ɂ͔��f�t���ɂ����Ǝv���܂��B
�����ہA���̃v���O�����ł͓_�Ŏ��Ԃ��������܂���ł������H
> Value=(ADRESH<<8)+ ADRESL;
> __delay_us(20); //�A�N�B�W�������ԁ@20us
> ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
> while(ADCON0bits.GO_DONE); //�ϊ������҂�
> return (Value);
����͊Q��������������܂��Lj����v���O�����ł��B
�擪�ŁA�܂�ADC���n�߂Ă������Ȃ��̂�
Value=(ADRESH<<8)+ ADRESL;
��ADC���ʃ��W�X�^�̒l���擾���Ă���ADC�ϊ����J�n���Ă��܂��B
���ۂ̏��A����͑O��s����ADC�̒l�����W�X�^�Ɏc���Ă���ł��傤���炻�ꂪ�o�͂���܂��B
�����ƍ���̒l��Ԃ������Ȃ�ϊ��������l���擾�Ƃ�����������Ă��������B
����̏ꍇ�͋C�t���Ȃ����x�ɒx��邾���ł����ǁA���ꂪ�v�Z�Ȃ�A�v�Z�������Ɍ��ʂ�Ԃ��悤�Ȏ��ł��B
�ҋ����b�N 2018/11/18(Sun) 12:54 No.1219 Re: �`�c�q�d�r
> MABO�����
> PIC�ɔ�ׂ�Ɛe�؉߂��銴���ł��ˁB
�����ł��ˁB
��{�I�Ȏv�z�Ƃ��ẮA�u�Ȃ�ׂ��ዉ�ȍ�Ɓi���W�X�^�̒��ڑ���j�͂��Ȃ��v�Ƃ����̂�����̂��Ǝv���܂��B
analogRead��analogWrite���A�g������̂������f���i����������j���̗p����Ă��܂��B
�ŁA���̃��f�����O�����g����������Ƃ��́A�{���́A���W�X�^�ڑ��삷����@�����Ȃ���Ȃ�Ȃ��킯�Ȃ̂ł����A
�����������A�����������g�����͋H�ŁA���́A�O���̃��C�u�������g���A�Ƃ������������ł��B
�܂�A���l��������A���삵�Ղ��Ȃ��Ă�����́����C�u�����𑽂��̐l���g���Ă��܂��B
���ꂪ������Ȃ��čŌ�̎�i�Ƃ��āA�f�[�^�V�[�g���݂āA���W�X�^��M��A�Ƃ��������ł��傤���B
�ܘ_�AArduino�g�����F�X�Ȑl������ł��傤���ǁB
����x���ŁA��������Ɛςݏグ�Ă����A���̃f�o�C�X�̔\�͂��ő���Ɋ��������A���ǂ����̂��o����̂͊ԈႢ����܂���B
����ǂ��A�ዉ�ȍ�Ƃ��w��ł��f�o�C�X��ς�������ɗ����܂���B
�t�Ɍ����A�����ł����ȃf�o�C�X�ŋ��ʂ̎d�l�ɂȂ��Ă�����̂��g��������
�o����̂��D�������A�F��ȃf�o�C�X�ł��g���A�܂��A�ԈႢ�����Ȃ��Ȃ�A�Ƃ������܂��B
���̃f�o�C�X���n�m���Ă���l�ł��A��͂葽���̍s�������Ă����ΊԈႢ���N����܂��B
�����������l�ł����AADC�ϊ��Ń��W�X�^���������Ȃ�A�f�[�^�V�[�g�Ŋm�F���鎖�͕K�{�ł��傤�B
�ł��AanalogRead(pin);���g����5�b�ň��S���Ďg�����Ƃ��o���܂��B
�t�Ɍ����A�d���Łu���x�Ȏ��v������l�̕����f�[�^�V�[�g���Q�Ƃ��Ȃ���Ȃ�Ȃ����W�X�^���삩��͗����
�Z���Ԃň��S�ɑ���ł������D�悳���܂��B
���ۂ̏��A�����ŏ��́A�f�[�^�V�[�g�����Ď������g�ŏ����Ă��܂����B
�ł��A���x�������悤�Ȏ�������ƁA�O��̕����g���܂킷�悤�ɂȂ�܂��B
�����Ȃ��Ă���ƁA���W�X�^�̓��e�͂�����ƖY��Ă��A���̍�������������d�v�ɂȂ�܂��B
���x���g���Ă���̂ŁA�M�����͑��������Ȃ����A�����̊��ł��B
�ł��AArduino�Ȃ�A�قƂ�Ǔ������̂��ŏ��������Ă��܂��B
������̕����A�M�����������A���̐l�ɂƂ��Ă�����₷���A�ƌ������͖����ł��B
�v���O�����̊J����Ђ��A���̂悤�Ȓ��ԓI�Ȃ��̂��g���͕̂K�R���Ǝv���܂��B
(�t�ɁA���W�X�^����Ȃ�āi�ɗ́j����ȁA�Ƃ����̂��嗬�ł��傤)
�ŁA���Ƃ��ẮA���W�X�^����(�f�[�^�V�[�g)�ƈ���ꓬ���āA���ʂȎ��Ԃ��g���Ă��܂�PIC����͗��ꂽ�����ǂ���
�v������ł��B�i�ܘ_�A�x�[�V�b�N�ȕ�������������̂͏d�v�ł��B�j
�����A���̃f�o�C�X�̐��ƂɂȂ�ړI�ł͂Ȃ��̂ŁA���̃��W�X�^���o���邱�Ƃ͎��̒i�K�ł͖��ɗ����Ȃ��Ȃ�܂��B
�Ȃ̂ŁA���̃f�o�C�X�ŗL�̎��́A���̎Q�l�T�C�g����R�s�[����Ηǂ��Ǝv���Ă��܂��B
�������A����ȏ�Ɉ��S�ŁA�M�����̍����̂��A���ԓI�ȏ��������Ă��郉�C�u�������g�����ł��B
���l�T�C�g�́A�ԈႢ���炯�ł��B�u����v�T�C�g�͎d�����Ȃ��Ǝv���̂ł����ǁA�u�����v�T�C�g�Ȃ��������
�����Ɓi�ߋ��ɏ������v���O�������j�Ǘ����Ă��炢�����Ǝv���Ă��܂��B
�܂��A���ǂ̏��A���ꂾ���}�C�R���v���O������d�q��H�́u�ԈႢ���N����₷���������h���v�Ƃ������ƂȂ̂ł��傤���ǁB
> PIC�ɔ�ׂ�Ɛe�؉߂��銴���ł��ˁB
�����ł��ˁB
��{�I�Ȏv�z�Ƃ��ẮA�u�Ȃ�ׂ��ዉ�ȍ�Ɓi���W�X�^�̒��ڑ���j�͂��Ȃ��v�Ƃ����̂�����̂��Ǝv���܂��B
analogRead��analogWrite���A�g������̂������f���i����������j���̗p����Ă��܂��B
�ŁA���̃��f�����O�����g����������Ƃ��́A�{���́A���W�X�^�ڑ��삷����@�����Ȃ���Ȃ�Ȃ��킯�Ȃ̂ł����A
�����������A�����������g�����͋H�ŁA���́A�O���̃��C�u�������g���A�Ƃ������������ł��B
�܂�A���l��������A���삵�Ղ��Ȃ��Ă�����́����C�u�����𑽂��̐l���g���Ă��܂��B
���ꂪ������Ȃ��čŌ�̎�i�Ƃ��āA�f�[�^�V�[�g���݂āA���W�X�^��M��A�Ƃ��������ł��傤���B
�ܘ_�AArduino�g�����F�X�Ȑl������ł��傤���ǁB
����x���ŁA��������Ɛςݏグ�Ă����A���̃f�o�C�X�̔\�͂��ő���Ɋ��������A���ǂ����̂��o����̂͊ԈႢ����܂���B
����ǂ��A�ዉ�ȍ�Ƃ��w��ł��f�o�C�X��ς�������ɗ����܂���B
�t�Ɍ����A�����ł����ȃf�o�C�X�ŋ��ʂ̎d�l�ɂȂ��Ă�����̂��g��������
�o����̂��D�������A�F��ȃf�o�C�X�ł��g���A�܂��A�ԈႢ�����Ȃ��Ȃ�A�Ƃ������܂��B
���̃f�o�C�X���n�m���Ă���l�ł��A��͂葽���̍s�������Ă����ΊԈႢ���N����܂��B
�����������l�ł����AADC�ϊ��Ń��W�X�^���������Ȃ�A�f�[�^�V�[�g�Ŋm�F���鎖�͕K�{�ł��傤�B
�ł��AanalogRead(pin);���g����5�b�ň��S���Ďg�����Ƃ��o���܂��B
�t�Ɍ����A�d���Łu���x�Ȏ��v������l�̕����f�[�^�V�[�g���Q�Ƃ��Ȃ���Ȃ�Ȃ����W�X�^���삩��͗����
�Z���Ԃň��S�ɑ���ł������D�悳���܂��B
���ۂ̏��A�����ŏ��́A�f�[�^�V�[�g�����Ď������g�ŏ����Ă��܂����B
�ł��A���x�������悤�Ȏ�������ƁA�O��̕����g���܂킷�悤�ɂȂ�܂��B
�����Ȃ��Ă���ƁA���W�X�^�̓��e�͂�����ƖY��Ă��A���̍�������������d�v�ɂȂ�܂��B
���x���g���Ă���̂ŁA�M�����͑��������Ȃ����A�����̊��ł��B
�ł��AArduino�Ȃ�A�قƂ�Ǔ������̂��ŏ��������Ă��܂��B
������̕����A�M�����������A���̐l�ɂƂ��Ă�����₷���A�ƌ������͖����ł��B
�v���O�����̊J����Ђ��A���̂悤�Ȓ��ԓI�Ȃ��̂��g���͕̂K�R���Ǝv���܂��B
(�t�ɁA���W�X�^����Ȃ�āi�ɗ́j����ȁA�Ƃ����̂��嗬�ł��傤)
�ŁA���Ƃ��ẮA���W�X�^����(�f�[�^�V�[�g)�ƈ���ꓬ���āA���ʂȎ��Ԃ��g���Ă��܂�PIC����͗��ꂽ�����ǂ���
�v������ł��B�i�ܘ_�A�x�[�V�b�N�ȕ�������������̂͏d�v�ł��B�j
�����A���̃f�o�C�X�̐��ƂɂȂ�ړI�ł͂Ȃ��̂ŁA���̃��W�X�^���o���邱�Ƃ͎��̒i�K�ł͖��ɗ����Ȃ��Ȃ�܂��B
�Ȃ̂ŁA���̃f�o�C�X�ŗL�̎��́A���̎Q�l�T�C�g����R�s�[����Ηǂ��Ǝv���Ă��܂��B
�������A����ȏ�Ɉ��S�ŁA�M�����̍����̂��A���ԓI�ȏ��������Ă��郉�C�u�������g�����ł��B
���l�T�C�g�́A�ԈႢ���炯�ł��B�u����v�T�C�g�͎d�����Ȃ��Ǝv���̂ł����ǁA�u�����v�T�C�g�Ȃ��������
�����Ɓi�ߋ��ɏ������v���O�������j�Ǘ����Ă��炢�����Ǝv���Ă��܂��B
�܂��A���ǂ̏��A���ꂾ���}�C�R���v���O������d�q��H�́u�ԈႢ���N����₷���������h���v�Ƃ������ƂȂ̂ł��傤���ǁB
�ҋ����b�N 2018/11/18(Sun) 14:20 No.1220 Re: �`�c�q�d�r
1��
while (1)
{
tmp = adconv();
RB3=1;
for(i = 0; i<tmp; i++){__delay_ms(2);}
RB3=0;
for(i = 0; i<tmp; i++){__delay_ms(2);}
}
��1�́A�x�����ł��B
mabo�����Љ�������t�q�k�̓�������ĉ������B
���擪�ŁA�܂�ADC���n�߂Ă������Ȃ��̂�
Value=(ADRESH<<8)+ ADRESL;
�m��1216�Ńv���g�^�C�v�錾�������̂ɁA�������Y��Ă��܂����B
���̂Ƃ���A���L�̂Ƃ���ł��B
�@�@�@�L
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 4000000
//�v���g�^�C�v�錾
unsigned int adconv();
//�ϐ��錾
unsigned int tmp;
unsigned int i;
unsigned int Value;
void main()
{
OSCCON = 0b0110000; // ����OSC 4MHz
// AD�R���o�[�^�ݒ�
ADCON0 = 0b01000001; // RA0��AD�R���o�[�^�s���ɂ��AAD�R���o�[�^�@�\��Ebable��
ADCON1 = 0b10000000; // ���ʐ��l�͉E�A��d����VDD
ANSEL = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s��
TRISA = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s���i���́j
TRISB = 0x00; // ���ׂďo��
PORTA = 0x00;
PORTB = 0x00;
unsigned int adconv();
while (1)
{
tmp = adconv();
for(i = 0; i<tmp; i++){RB3=1;}
__delay_ms(2);
for(i = 0; i<tmp; i++){RB3=0;}
__delay_ms(2);
}
}
unsigned int adconv()
{
Value=(ADRESH<<8)+ ADRESL;
__delay_us(20); //�A�N�B�W�������ԁ@20us
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (Value);
}
while (1)
{
tmp = adconv();
RB3=1;
for(i = 0; i<tmp; i++){__delay_ms(2);}
RB3=0;
for(i = 0; i<tmp; i++){__delay_ms(2);}
}
��1�́A�x�����ł��B
mabo�����Љ�������t�q�k�̓�������ĉ������B
���擪�ŁA�܂�ADC���n�߂Ă������Ȃ��̂�
Value=(ADRESH<<8)+ ADRESL;
�m��1216�Ńv���g�^�C�v�錾�������̂ɁA�������Y��Ă��܂����B
���̂Ƃ���A���L�̂Ƃ���ł��B
�@�@�@�L
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 4000000
//�v���g�^�C�v�錾
unsigned int adconv();
//�ϐ��錾
unsigned int tmp;
unsigned int i;
unsigned int Value;
void main()
{
OSCCON = 0b0110000; // ����OSC 4MHz
// AD�R���o�[�^�ݒ�
ADCON0 = 0b01000001; // RA0��AD�R���o�[�^�s���ɂ��AAD�R���o�[�^�@�\��Ebable��
ADCON1 = 0b10000000; // ���ʐ��l�͉E�A��d����VDD
ANSEL = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s��
TRISA = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s���i���́j
TRISB = 0x00; // ���ׂďo��
PORTA = 0x00;
PORTB = 0x00;
unsigned int adconv();
while (1)
{
tmp = adconv();
for(i = 0; i<tmp; i++){RB3=1;}
__delay_ms(2);
for(i = 0; i<tmp; i++){RB3=0;}
__delay_ms(2);
}
}
unsigned int adconv()
{
Value=(ADRESH<<8)+ ADRESL;
__delay_us(20); //�A�N�B�W�������ԁ@20us
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (Value);
}
TR 2018/11/18(Sun) 18:56 Re: �`�c�q�d�r
�܂��A�s���Ă��鎖�̖ړI������܂��B
�ŏ��ɂ��������悤�ɁA�v���O�����I�ɂ́u�ԈႢ�v�ł͂���܂���B
�Q�l�T�C�g�͊ȒP�Ɍ����A�uA/D�ϊ��̌��ʂ�ڎ��Ŋm�F����v�Ƃ������̂ł��B
����Ȃ̂ɁA�v���O���������������̂ŁA���̓���̂悤�ɖ�̕�����Ȃ����̂ɂȂ��Ă��܂����A
�ƌ������ł��B�܂�A�v���O������������ړI���ʂ����Ă��Ȃ���ł��B
TR����͍ŏ����犨�Ⴂ���Ă���悤�ł����AADRES��PWM�Ƃ͊W����܂���B
ADC�ϊ��̌��ʂ��i�[���郌�W�X�^�ł��B
PWM�ƘA��������Ȃ�S���ʂ̃v���O�����ɂȂ�܂��B�܂�_�ł̑����ł͂Ȃ��A
���邳��ς���v���O�����ł��B
�����āA���e�������ƍl���Ă��������B
�_�ł̃X�s�[�h�͒P��ADC�l�����{�ix���b�j��ς��邾���ł��B
�Ӗ��������Ă����
RB3=1;
for(i = 0; i<tmp; i++){__delay_ms(2);}
RB3=0;
for(i = 0; i<tmp; i++){__delay_ms(2);}
��
RB3=1;
for(i = 0; i<tmp; i++){__delay_us(20);}
RB3=0;
for(i = 0; i<tmp; i++){__delay_us(20);}
������(�Ӗ�)�̃X�P�b�`���Ɣ��锤�ł��B
�܂��A
���擪�ŁA�܂�ADC���n�߂Ă������Ȃ��̂�
�̕�����
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (Value);
�̊ԂŒl���擾���Ȃ��ƈӖ����Ȃ��A�ƌ������ł��B
�NjL���Ă����܂��B
ADC�̌��ʂ��m�F����v���O�����Ȃ�A�܂��A�����Ƃ��̌��ʂ���܂��ɂł��m�F�ł���A
�Ƃ����̂��d�v�ł��B
�܂�AADC��10�r�b�g�A�܂�A0�`1023�܂ł̌��ʂɂȂ�܂��B
RB3=1;
for(i = 0; i<tmp; i++){__delay_ms(2);}
�Ə����Ă���͍̂ő�l���擾�������ɖ�2�b���x�i�_�Ŏ����ł�4�b�j��z�肵�Ă��܂��B
�ŁA�{�����[�����ɂ�������1�b�A�܂�A���̒��x�Ȃ玞�v�ȂǂŁA���f�t���₷���A���A����قǎ��Ԃ�������Ȃ��A
�Ƃ����̂�z�肵�����̂ł��B�X�ɂ̓}�C�R�����z�肵�Ă���N���b�N�œ��삵�Ă��邩�m�F�ł��܂��B
����Ƃ�
> ��1�́A�x�����ł��B
�͓_�ŊԊu��20�b��30�b���������Ƃ������Ƃł��傤���H
���������Ȃ瑼�Ɍ���������̂����m��܂���B����N���b�N��������Ƃ��B
������݂Ăǂ̈ʂ̑����A�܂�ADC�̒l����ʂŁA�{�����[���ʒu���ǂ̈ʒu�ɂ���̂��A�_�ł����Ĕ��f�t���܂����H
���̈ʒu�Ȃ�A���̈ʁA�Ƃ������̂������Ă��铮��ɂ͌����܂���B
�ŏ��ɂ��������悤�ɁA�v���O�����I�ɂ́u�ԈႢ�v�ł͂���܂���B
�Q�l�T�C�g�͊ȒP�Ɍ����A�uA/D�ϊ��̌��ʂ�ڎ��Ŋm�F����v�Ƃ������̂ł��B
����Ȃ̂ɁA�v���O���������������̂ŁA���̓���̂悤�ɖ�̕�����Ȃ����̂ɂȂ��Ă��܂����A
�ƌ������ł��B�܂�A�v���O������������ړI���ʂ����Ă��Ȃ���ł��B
TR����͍ŏ����犨�Ⴂ���Ă���悤�ł����AADRES��PWM�Ƃ͊W����܂���B
ADC�ϊ��̌��ʂ��i�[���郌�W�X�^�ł��B
PWM�ƘA��������Ȃ�S���ʂ̃v���O�����ɂȂ�܂��B�܂�_�ł̑����ł͂Ȃ��A
���邳��ς���v���O�����ł��B
�����āA���e�������ƍl���Ă��������B
�_�ł̃X�s�[�h�͒P��ADC�l�����{�ix���b�j��ς��邾���ł��B
�Ӗ��������Ă����
RB3=1;
for(i = 0; i<tmp; i++){__delay_ms(2);}
RB3=0;
for(i = 0; i<tmp; i++){__delay_ms(2);}
��
RB3=1;
for(i = 0; i<tmp; i++){__delay_us(20);}
RB3=0;
for(i = 0; i<tmp; i++){__delay_us(20);}
������(�Ӗ�)�̃X�P�b�`���Ɣ��锤�ł��B
�܂��A
���擪�ŁA�܂�ADC���n�߂Ă������Ȃ��̂�
�̕�����
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (Value);
�̊ԂŒl���擾���Ȃ��ƈӖ����Ȃ��A�ƌ������ł��B
�NjL���Ă����܂��B
ADC�̌��ʂ��m�F����v���O�����Ȃ�A�܂��A�����Ƃ��̌��ʂ���܂��ɂł��m�F�ł���A
�Ƃ����̂��d�v�ł��B
�܂�AADC��10�r�b�g�A�܂�A0�`1023�܂ł̌��ʂɂȂ�܂��B
RB3=1;
for(i = 0; i<tmp; i++){__delay_ms(2);}
�Ə����Ă���͍̂ő�l���擾�������ɖ�2�b���x�i�_�Ŏ����ł�4�b�j��z�肵�Ă��܂��B
�ŁA�{�����[�����ɂ�������1�b�A�܂�A���̒��x�Ȃ玞�v�ȂǂŁA���f�t���₷���A���A����قǎ��Ԃ�������Ȃ��A
�Ƃ����̂�z�肵�����̂ł��B�X�ɂ̓}�C�R�����z�肵�Ă���N���b�N�œ��삵�Ă��邩�m�F�ł��܂��B
����Ƃ�
> ��1�́A�x�����ł��B
�͓_�ŊԊu��20�b��30�b���������Ƃ������Ƃł��傤���H
���������Ȃ瑼�Ɍ���������̂����m��܂���B����N���b�N��������Ƃ��B
������݂Ăǂ̈ʂ̑����A�܂�ADC�̒l����ʂŁA�{�����[���ʒu���ǂ̈ʒu�ɂ���̂��A�_�ł����Ĕ��f�t���܂����H
���̈ʒu�Ȃ�A���̈ʁA�Ƃ������̂������Ă��铮��ɂ͌����܂���B
�ҋ����b�N 2018/11/18(Sun) 19:23 No.1222 Re: �`�c�q�d�r
 �������A�Ӗ��s����__delay_us(20); //�A�N�B�W�������ԁ@20us�����A
�������A�Ӗ��s����__delay_us(20); //�A�N�B�W�������ԁ@20us�����A����ƁA�ǂݎ��l�̕ϐ��錾���u������������`�c�q�d�r�ɂ��܂����B
�ȒP�ɂ��܂����B
�{���́A�`�c�q�d�r���ς������Ƃ�����if�����t����̂ł��傤���ǁB
�ĂP
for(i = 0; i<ADRES; i++){RB3=1;}
__delay_ms(2);
for(i = 0; i<ADRES; i++){RB3=0;}
__delay_ms(2);
�ĂQ
for(i = 0; i<ADRES; i++){__delay_ms(2);}
RB3=1;
for(i = 0; i<ADRES; i++){__delay_ms(2);}
RB3=0;
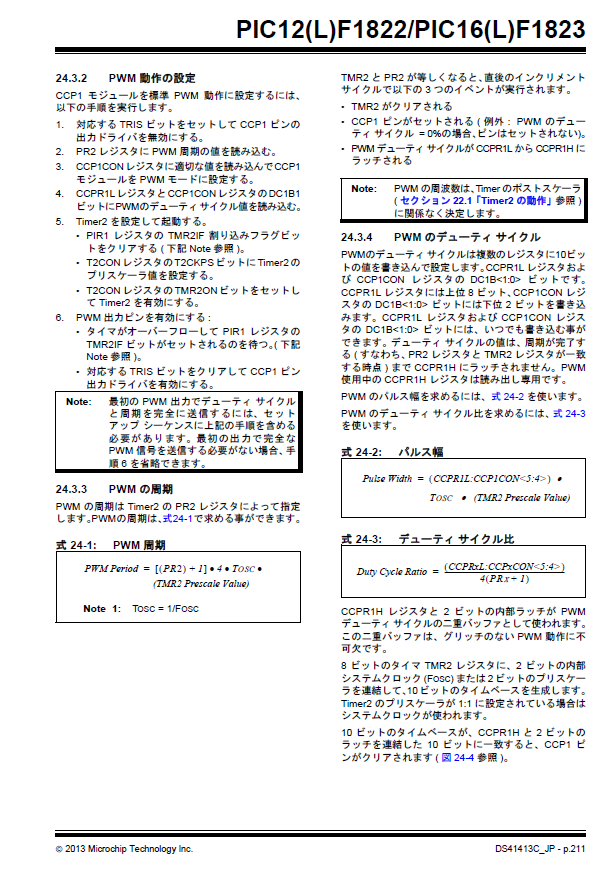
��1�ƈ�2�̈Ⴂ
��1�́Ai���O����`�c�q�d�r�̒l�ɂȂ�����A�q�a��_�����A�Q���������āA�܂�i���O����`�c�q�d�r�܂łq�a���_��
��2�́Ai���O����`�c�q�d�r�̒l�ɂȂ�����A�Q���������āA�q�a��_���i�܂�i���O����`�c�q�d�r�ɂȂ�A�Q�����o�߂���܂ł̊ԁj���A���ɁA�q�a������
�ǂ���������Ɏv���邪�A�����͈ĂP�̕��������B
���ǁA���́A��1�������Ȃ�̂�������܂���ł����B
while (1)
{
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
ADRES=(ADRESH<<8)+ ADRESL;
//�����������1�ƈ�2�����ւ��܂��B
for(i = 0; i<ADRES; i++){RB3=1;}
__delay_ms(2);
for(i = 0; i<ADRES; i++){RB3=0;}
__delay_ms(2);
}
�NjL
�o�v�l�@�\�Ƃ`�c�b�@�\�@�悭���������ɁA����A�����ēǂ�ł��Ă��܂����B
�ǂ����10�r�b�g����Ƃ����_�Ŏ��Ă����B
���ꂪ�A�A�A�A�ԈႦ�Ă��܂��������B
�ǂ�����A�k�`�J�Ȃ̂ŁA����w���f���Ă��܂����B
�o�v�l�́A�b�b�o�q�P�̏��8�r�b�g�Ƃb�b�o1�b�n�m�̂c�b�P�a��2�r�b�g
�`�c�b�́A���8�o�C�g��ADRESH (ADRES High byte)�A����2�o�C�g��ADRESL
�k�`�J�������ꍇ�A�`�c�b�ϊ����Ԃ𗘗p����̂ł͂Ȃ��A�o�v�l�@�\�ł���B
while(ADCON0bits.GO_DONE); //�`�c�b�̕ϊ������҂��@�A������g���̂ł͂Ȃ��A
ADRESH + ADRESL�̃r�b�g�̒l�@���b�b�o1�k�Ƃb�b�o1�b�n�m�̂c�b�P�a
�ɂ���A�n�j�Ǝv����B
�ǂ��ł��傤���H�H
TR 2018/11/19(Mon) 11:23 Re: �`�c�q�d�r
�܂��A���������̂�TR����́A���������������悤�Ƃ��Ă���̂ł��傤���H
��1����2���v���O�����I�ɂ͊ԈႢ�ł͂���܂���B
�Ȃ̂ŁA�����Ƃ��ɂ����ꂽ�悤�ɓ����܂��B
�d�v�Ȏ��́A�ړI�ƍ��v���Ă��邩�ǂ����ł��B
> �ǂݎ��l�̕ϐ��錾���u������������`�c�q�d�r�ɂ��܂����B
����͂��܂肢���ύX�ł͂���܂���B
�Ƃ����̂̓��W�X�^���ƃ_�u���\�������邩��ł��B
(�܂�A�����ō��ϐ��ɍ������W�X�^�ł�PORTD�Ƃ���t����̂͂ǂ��ł��傤���H)
�������ɂ��Ă����Ƃ���ʂ��������ǂ��ł��B
> ���́A��1�������Ȃ�̂�������܂���ł���
orz�@���Ԃ̌v���̎d���������Ɗo���������ǂ��ł��B
�d�v�Ȃ̂́u�����Ȃ�/�x���Ȃ�v�ł͂Ȃ��āA���ꂪ���b�ɂȂ�A�Ɣc�����鎖�ł��B
Arduino�Ȃ�A���Ԃ����̂܂�PC�ɑ����ĕ\���o���܂����ǁA
PIC�g���Ȃ�LED�̓_�ł̑����Ŏ��ʂ���悤�Ȏg�������o����K�v������܂��B
���łȂ���ALCD��7�Z�O���q���Ő��l��\�������܂��B
ADC��5V�A�܂�A1023�̎��̎��Ԃ�t���Ă����܂��B
�Ȃ��A���̎��ԂɂȂ�̂����l���Ă��������B
�i�����͕����Ă��܂��j
for(i = 0; i<ADRES; i++){RB3=1;}//18.7ms
__delay_ms(2);//2ms
for(i = 0; i<ADRES; i++){RB3=0;}//18.7ms
__delay_ms(2);//2ms
���ꂾ�ƁA��21ms�̓_��/�����ł��B
���ۂ̏��A__delay_ms(2);�͕t���Ȃ��ŁAADRES*30�Ƃ��̕����A�܂��A���W�ɂȂ�܂��B
for(i = 0; i<ADRES; i++) {__delay_ms(2);}//2.06s
RB3 = 1;//3us
for(i = 0; i<ADRES; i++) {__delay_ms(2);}//2.06s
RB3 = 0;//3us
���������Ɩ�2.06s�̓_��/�����ł��B
��1����2���v���O�����I�ɂ͊ԈႢ�ł͂���܂���B
�Ȃ̂ŁA�����Ƃ��ɂ����ꂽ�悤�ɓ����܂��B
�d�v�Ȏ��́A�ړI�ƍ��v���Ă��邩�ǂ����ł��B
> �ǂݎ��l�̕ϐ��錾���u������������`�c�q�d�r�ɂ��܂����B
����͂��܂肢���ύX�ł͂���܂���B
�Ƃ����̂̓��W�X�^���ƃ_�u���\�������邩��ł��B
(�܂�A�����ō��ϐ��ɍ������W�X�^�ł�PORTD�Ƃ���t����̂͂ǂ��ł��傤���H)
�������ɂ��Ă����Ƃ���ʂ��������ǂ��ł��B
> ���́A��1�������Ȃ�̂�������܂���ł���
orz�@���Ԃ̌v���̎d���������Ɗo���������ǂ��ł��B
�d�v�Ȃ̂́u�����Ȃ�/�x���Ȃ�v�ł͂Ȃ��āA���ꂪ���b�ɂȂ�A�Ɣc�����鎖�ł��B
Arduino�Ȃ�A���Ԃ����̂܂�PC�ɑ����ĕ\���o���܂����ǁA
PIC�g���Ȃ�LED�̓_�ł̑����Ŏ��ʂ���悤�Ȏg�������o����K�v������܂��B
���łȂ���ALCD��7�Z�O���q���Ő��l��\�������܂��B
ADC��5V�A�܂�A1023�̎��̎��Ԃ�t���Ă����܂��B
�Ȃ��A���̎��ԂɂȂ�̂����l���Ă��������B
�i�����͕����Ă��܂��j
for(i = 0; i<ADRES; i++){RB3=1;}//18.7ms
__delay_ms(2);//2ms
for(i = 0; i<ADRES; i++){RB3=0;}//18.7ms
__delay_ms(2);//2ms
���ꂾ�ƁA��21ms�̓_��/�����ł��B
���ۂ̏��A__delay_ms(2);�͕t���Ȃ��ŁAADRES*30�Ƃ��̕����A�܂��A���W�ɂȂ�܂��B
for(i = 0; i<ADRES; i++) {__delay_ms(2);}//2.06s
RB3 = 1;//3us
for(i = 0; i<ADRES; i++) {__delay_ms(2);}//2.06s
RB3 = 0;//3us
���������Ɩ�2.06s�̓_��/�����ł��B
�ҋ����b�N 2018/11/19(Mon) 15:37 No.1224 Re: �`�c�q�d�r
���W�X�^�͂Ƃ������APWM�͏o�͂ł��B�ڂŌ������ԂƂ��Ă͓_�łł͖����_���ł��B
LED�Ɩ��Ȃǂł̖��邳�����ł��g���Ă����@�ł��B
�܂��A���[�^�̑��x�����ɂ��悭�g���Ă��܂��B
����AADC���A�i���O/�f�W�^���R���o�[�^�͓��͂����A�i���O�d���𐔒l��������̂ł��B
L�`�J�Ƃ͒��ڂ͊W����܂���B
����̂悤�ɁA�{�����[����t�������u���ƁA�{�����[���̈ʒu�������ɂ���̂��ׂ邽�߂Ɏg���܂��B
�����āA���̃{�����[���ʒu���Ӗ�����o�́H�ɂ��܂��B
LED�Ɩ��Ȃǂł̖��邳�����ł��g���Ă����@�ł��B
�܂��A���[�^�̑��x�����ɂ��悭�g���Ă��܂��B
����AADC���A�i���O/�f�W�^���R���o�[�^�͓��͂����A�i���O�d���𐔒l��������̂ł��B
L�`�J�Ƃ͒��ڂ͊W����܂���B
����̂悤�ɁA�{�����[����t�������u���ƁA�{�����[���̈ʒu�������ɂ���̂��ׂ邽�߂Ɏg���܂��B
�����āA���̃{�����[���ʒu���Ӗ�����o�́H�ɂ��܂��B
�ҋ����b�N 2018/11/19(Mon) 17:55 No.1225 Re: �`�c�q�d�r
>�܂��A���������̂�TR����́A���������������悤�Ƃ��Ă���̂ł��傤���H
�L��������܂��B
���ȏ��ł̂o�v�l�ɂ��ẮA���Œ��R����g���Ă̖��邳����������܂���̂ŁA
�w�K�������Ǝv���Ă��܂��B
���Ƃ����̂̓��W�X�^���ƃ_�u���\�������邩��ł��B
�~�߂܂��B
���d�v�Ȃ̂́u�����Ȃ�/�x���Ȃ�v�ł͂Ȃ��āA���ꂪ���b�ɂȂ�A�Ɣc�����鎖�ł��B
���ꂩ��́A�w�K�e�[�}��1�ɂ������Ǝv���܂��B
�����ŁA�o�v�l�@�\�ɂ��ϒ�R����g���k�d�c�����炩�ɖ��邭������Â���������l���܂������A
�R���p�C���s��
�o���܂�����A���w�E�肢�����Ǝv���܂��B
/*�o�v�l�@�\�ɂ��RB3�̂k�d�c�Ŋ��炩�ɒ����B�ϒ�R�Ő���*/
// PIC16F88 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM (void);
void InitTimer2 (void);
unsigned int adconv(void);
// ���C����
void main (void)
{
OSCCON = 0x40; //�N���b�N���g����1MHz�ɐݒ�
// 1,2,17,18�[�q����o�͒[�q�ɐݒ�
CMCON = 0x07;
// �d�����x���̏����ݒ�
PORTA = 0xFF;
PORTB = 0xFF;
// ���o�͐ݒ�
TRISA =0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s���i���́j
TRISB =0x00;
ANSELA=0b00000001;//�q�`0���A�i���O�s���ɐݒ�
ANSELB=0x00; //
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00000001; // RA0��AD�R���o�[�^�s���ɂ��AAD�R���o�[�^�@�\��Ebable��
ADCON1 =0b10000000; // ���ʐ��l�͉E�AAD�R���o�[�^�N���b�N��FOSC/2�A��d����VDD
//�ϐ��錾
unsigned int num ;
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
while(1) {
// �A�i���O�l�̕ϊ��ƓǍ��ݏ���
adconv();
num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ���
unsigned int adconv()
{
unsigned int temp;
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
temp = ADRESH ;//
temp = ( temp << 8 ) + ADRESL ;//RA0�œǂݍ��l��temp�ɑ��
return temp ;//�ǂݍ���temp��num�ɕԂ�
}
// PWM���[�h�ݒ��
void InitPWM (void)
{
// RB3�[�q���o�͒[�q�ɐݒ�
TRISBbits.TRISB3 = 0;
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3=1;
CCP1CONbits.CCP1M2=1;
CCP1CONbits.CCP1M1=0;
CCP1CONbits.CCP1M0=0;
// ������1�ʕb�ɐݒ�i99 + 1�ʕb�j
PR2 =100;
// �f���[�e�B�[�T�C�N����0ms�ŏ�����
CCPR1L = 0;
CCP1CONbits.CCP1X=0;
CCP1CONbits.CCP1Y=0;
}
// �^�C�}2�ݒ��
void InitTimer2 (void)
{
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1=0;
T2CONbits.T2CKPS0=0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON= 1;
}
�L��������܂��B
���ȏ��ł̂o�v�l�ɂ��ẮA���Œ��R����g���Ă̖��邳����������܂���̂ŁA
�w�K�������Ǝv���Ă��܂��B
���Ƃ����̂̓��W�X�^���ƃ_�u���\�������邩��ł��B
�~�߂܂��B
���d�v�Ȃ̂́u�����Ȃ�/�x���Ȃ�v�ł͂Ȃ��āA���ꂪ���b�ɂȂ�A�Ɣc�����鎖�ł��B
���ꂩ��́A�w�K�e�[�}��1�ɂ������Ǝv���܂��B
�����ŁA�o�v�l�@�\�ɂ��ϒ�R����g���k�d�c�����炩�ɖ��邭������Â���������l���܂������A
�R���p�C���s��
�o���܂�����A���w�E�肢�����Ǝv���܂��B
/*�o�v�l�@�\�ɂ��RB3�̂k�d�c�Ŋ��炩�ɒ����B�ϒ�R�Ő���*/
// PIC16F88 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM (void);
void InitTimer2 (void);
unsigned int adconv(void);
// ���C����
void main (void)
{
OSCCON = 0x40; //�N���b�N���g����1MHz�ɐݒ�
// 1,2,17,18�[�q����o�͒[�q�ɐݒ�
CMCON = 0x07;
// �d�����x���̏����ݒ�
PORTA = 0xFF;
PORTB = 0xFF;
// ���o�͐ݒ�
TRISA =0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s���i���́j
TRISB =0x00;
ANSELA=0b00000001;//�q�`0���A�i���O�s���ɐݒ�
ANSELB=0x00; //
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00000001; // RA0��AD�R���o�[�^�s���ɂ��AAD�R���o�[�^�@�\��Ebable��
ADCON1 =0b10000000; // ���ʐ��l�͉E�AAD�R���o�[�^�N���b�N��FOSC/2�A��d����VDD
//�ϐ��錾
unsigned int num ;
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
while(1) {
// �A�i���O�l�̕ϊ��ƓǍ��ݏ���
adconv();
num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ���
unsigned int adconv()
{
unsigned int temp;
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
temp = ADRESH ;//
temp = ( temp << 8 ) + ADRESL ;//RA0�œǂݍ��l��temp�ɑ��
return temp ;//�ǂݍ���temp��num�ɕԂ�
}
// PWM���[�h�ݒ��
void InitPWM (void)
{
// RB3�[�q���o�͒[�q�ɐݒ�
TRISBbits.TRISB3 = 0;
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3=1;
CCP1CONbits.CCP1M2=1;
CCP1CONbits.CCP1M1=0;
CCP1CONbits.CCP1M0=0;
// ������1�ʕb�ɐݒ�i99 + 1�ʕb�j
PR2 =100;
// �f���[�e�B�[�T�C�N����0ms�ŏ�����
CCPR1L = 0;
CCP1CONbits.CCP1X=0;
CCP1CONbits.CCP1Y=0;
}
// �^�C�}2�ݒ��
void InitTimer2 (void)
{
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1=0;
T2CONbits.T2CKPS0=0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON= 1;
}
TR 2018/11/19(Mon) 18:43 Re: �`�c�q�d�r
���삵�܂����I
�ϒ�R��Ŗ��邭�Ȃ�����Â��Ȃ����肵�܂����B
�ԈႢ��
�l�o�k�`�a�������Ă���܂����B
�ύX�_
�`�m�r�d�k�`�@���`�m�r�d�k
�`�m�r�d�k�a�@���@���̍s���폜
�ł��A�`�m�r�d�k�ɂ͂`���a��t����K�v�Ǝv���̂ł����B
�ǂ����Ă��낤�H
�Ǝv���āA�A�f�[�^�V�[�g������ƁA
88�ɂ͂`�m�r�d�k�͂`�����0�`7�܂ł�������܂���ł����I�I
�ϒ�R��Ŗ��邭�Ȃ�����Â��Ȃ����肵�܂����B
�ԈႢ��
�l�o�k�`�a�������Ă���܂����B
�ύX�_
�`�m�r�d�k�`�@���`�m�r�d�k
�`�m�r�d�k�a�@���@���̍s���폜
�ł��A�`�m�r�d�k�ɂ͂`���a��t����K�v�Ǝv���̂ł����B
�ǂ����Ă��낤�H
�Ǝv���āA�A�f�[�^�V�[�g������ƁA
88�ɂ͂`�m�r�d�k�͂`�����0�`7�܂ł�������܂���ł����I�I
TR 2018/11/19(Mon) 19:14 Re: �`�c�q�d�r
> while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
> adconv();
> num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
> CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> }
�̕����ł����ǁAadconv();��2�Ă��܂��B
���ꎩ�́A�ԈႢ�Ŏc�����̂��Ǝv���̂ł����ǁA���ۂɕ����̃A�i���O���̓s�����ւ��Ďg������
���̎�@��������肵�܂��B(1���ǂݎ̂Ă�)
�܂�A��ւ��Ă����Ɏ擾����ƊԈ�����l�ɂȂ�₷������ł��B
�ŁA�O�ɁA
> �Ӗ��s����__delay_us(20); //�A�N�B�W�������ԁ@20us����
�ƌ����Ă��܂����ǁA������`�����l�����ւ�����ɁA���̓d�������肷��܂ŏ����҂��Ă���A�Ƃ����Ӗ����Ǝv���܂��B
����̓`�����l�����ւ����ł͖����̂ŁA�����Ă����v���ȁH�Ǝv���Ă��܂��B
> // ������1�ʕb�ɐݒ�i99 + 1�ʕb�j
> PR2 =100;
�ȑO���������ȋL�q�i�R�����g�j���������̂ł����ǁA��肠���������Ă����܂����B
�����
> // ������1�ʕb�ɐݒ�i249 + 1�ʕb�j
> PR2 =249;
�Ƃ������̂ł��B
���̎��̎����́i249+1�j*4[us]=1000[us]=1ms�ł��B
�ŁA����̏ꍇ��
�i100+1�j*4��404us�ł��B
���ƁAPWM��ADC�̃��J�j�Y���H�������Ɖ������Ă����������ǂ��ł��B
PWM���ƁA
PR2�������A�܂肱�̒l������ɓ�����܂��B
duty�l��HIGH��LOW�ɐ�ւ��l�ł��B(�ꍇ�ɂ���Ă͋t���ɐ�ς���ݒ肪������������܂�)
�^�C�}�[��0�ŏo�͂�HIGH�ɂȂ�A�^�C�}�[��duty�l��LOW�ɐ�ւ��܂��B
�u249�v�ƁA250��1�����������ɂ���̂�249���J�E���g���āA����0�ɂȂ�������HIGH�ɂȂ�̂�1�������܂��B
���������d�g�݂Ȃ̂ŁAPR2��101�i101/255�j�ɂ��āAADC�̒l�����̂܂ܓ���Ă��{�����[���̔����ȉ��̕�������
�������Ȃ��i�܂�A101/255�ȏ�ɂȂ�Ə��HIGH�j�ɂȂ��Ă���Ƒz�����܂��B
���o�I�ɂ͂ǂ��������ł��傤���H
�{�����[���̃t�������W���g���āA���邳�߂������̂Ȃ�APR2��255���K���ł��傤�B
�ܘ_�AADC�̒l��101/255�����������̂�duty�l�ɐݒ肵�Ă��ǂ��ł����ǁB
�ŁA
while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
�̕�������1��ŁA280us���x�̎��Ԃ���������܂���B�܂�APWM��1��̓_�ł��������擾���āA
��ւ��l�𑀍삵�Ă��܂��B
�������������͓K�x�ȃf�B���C����ꂽ�����ǂ��Ǝv���܂��B�i���̂܂܂őʖڂƂ�����ł͖����ł����ǁj
�܂�A
while(1) {
num = adconv();
CCPR1L = num/4 ;
__delay_ms(10);
}
���x�ɂ���̂��K�����ȁA�Ǝv������ł��B
�ŁA���������������Ɓi�܂��A���������Ȃ��Ă��ǂ��̂ł����ǁj
while(1) {
CCPR1L = adconv()/4 ;
__delay_ms(10);
}
�ŁA�����Ӗ��ł��B
���ꂪ�ANo.1213�ŏ�����Arduino��
void loop() {
analogWrite(3,analogRead(A0)/4);
delay(10);
}
�ł��B��������delay(10);�������Ӗ��ŕt���Ă��܂��B
> adconv();
> num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
> CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> }
�̕����ł����ǁAadconv();��2�Ă��܂��B
���ꎩ�́A�ԈႢ�Ŏc�����̂��Ǝv���̂ł����ǁA���ۂɕ����̃A�i���O���̓s�����ւ��Ďg������
���̎�@��������肵�܂��B(1���ǂݎ̂Ă�)
�܂�A��ւ��Ă����Ɏ擾����ƊԈ�����l�ɂȂ�₷������ł��B
�ŁA�O�ɁA
> �Ӗ��s����__delay_us(20); //�A�N�B�W�������ԁ@20us����
�ƌ����Ă��܂����ǁA������`�����l�����ւ�����ɁA���̓d�������肷��܂ŏ����҂��Ă���A�Ƃ����Ӗ����Ǝv���܂��B
����̓`�����l�����ւ����ł͖����̂ŁA�����Ă����v���ȁH�Ǝv���Ă��܂��B
> // ������1�ʕb�ɐݒ�i99 + 1�ʕb�j
> PR2 =100;
�ȑO���������ȋL�q�i�R�����g�j���������̂ł����ǁA��肠���������Ă����܂����B
�����
> // ������1�ʕb�ɐݒ�i249 + 1�ʕb�j
> PR2 =249;
�Ƃ������̂ł��B
���̎��̎����́i249+1�j*4[us]=1000[us]=1ms�ł��B
�ŁA����̏ꍇ��
�i100+1�j*4��404us�ł��B
���ƁAPWM��ADC�̃��J�j�Y���H�������Ɖ������Ă����������ǂ��ł��B
PWM���ƁA
PR2�������A�܂肱�̒l������ɓ�����܂��B
duty�l��HIGH��LOW�ɐ�ւ��l�ł��B(�ꍇ�ɂ���Ă͋t���ɐ�ς���ݒ肪������������܂�)
�^�C�}�[��0�ŏo�͂�HIGH�ɂȂ�A�^�C�}�[��duty�l��LOW�ɐ�ւ��܂��B
�u249�v�ƁA250��1�����������ɂ���̂�249���J�E���g���āA����0�ɂȂ�������HIGH�ɂȂ�̂�1�������܂��B
���������d�g�݂Ȃ̂ŁAPR2��101�i101/255�j�ɂ��āAADC�̒l�����̂܂ܓ���Ă��{�����[���̔����ȉ��̕�������
�������Ȃ��i�܂�A101/255�ȏ�ɂȂ�Ə��HIGH�j�ɂȂ��Ă���Ƒz�����܂��B
���o�I�ɂ͂ǂ��������ł��傤���H
�{�����[���̃t�������W���g���āA���邳�߂������̂Ȃ�APR2��255���K���ł��傤�B
�ܘ_�AADC�̒l��101/255�����������̂�duty�l�ɐݒ肵�Ă��ǂ��ł����ǁB
�ŁA
while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
�̕�������1��ŁA280us���x�̎��Ԃ���������܂���B�܂�APWM��1��̓_�ł��������擾���āA
��ւ��l�𑀍삵�Ă��܂��B
�������������͓K�x�ȃf�B���C����ꂽ�����ǂ��Ǝv���܂��B�i���̂܂܂őʖڂƂ�����ł͖����ł����ǁj
�܂�A
while(1) {
num = adconv();
CCPR1L = num/4 ;
__delay_ms(10);
}
���x�ɂ���̂��K�����ȁA�Ǝv������ł��B
�ŁA���������������Ɓi�܂��A���������Ȃ��Ă��ǂ��̂ł����ǁj
while(1) {
CCPR1L = adconv()/4 ;
__delay_ms(10);
}
�ŁA�����Ӗ��ł��B
���ꂪ�ANo.1213�ŏ�����Arduino��
void loop() {
analogWrite(3,analogRead(A0)/4);
delay(10);
}
�ł��B��������delay(10);�������Ӗ��ŕt���Ă��܂��B
�ҋ����b�N 2018/11/20(Tue) 02:50 No.1228 Re: �`�c�q�d�r
 > while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
> while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���> adconv();
> num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
> CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> }
�̕����ł����ǁAadconv();��2�Ă��܂��B
���ꎩ�́A�ԈႢ�Ŏc�����̂��Ǝv���̂ł����ǁA���ۂɕ����̃A�i���O���̓s�����ւ��Ďg������
���̎�@��������肵�܂��B(1���ǂݎ̂Ă�)
���̂Ƃ���ł��B1���ǂݎ̂Ă�Ƃ������e�ł��B
���̈Ӗ������Ŏg���܂����B
�ł���A�n�j�ł���ˁB
�ȑO�A�Ԍ��v���O�����ł������悤�Ȉȉ���A�����������Ă��āA���̃A�C�f�A���v�����܂����B
���v���O�������甲���@��
// �i�v���[�v
while(1){
MODE=PORTA&0b11;
__delay_ms(50);
while(MODE!=(PORTA&0b11)){ //�ω�������E�F�C�g�A������Ίm��
MODE=PORTA&0b11;
> �Ӗ��s����__delay_us(20); //�A�N�B�W�������ԁ@20us����
�ƌ����Ă��܂����ǁA������`�����l�����ւ�����ɁA���̓d�������肷��܂ŏ����҂��Ă���A�Ƃ����Ӗ����Ǝv���܂��B
����̓`�����l�����ւ����ł͖����̂ŁA�����Ă����v���ȁH�Ǝv���Ă��܂��B
�����ł������B�`���^�����O�h�~�ł��ˁB
> // ������1�ʕb�ɐݒ�i99 + 1�ʕb�j
> PR2 =100;
�ȑO���������ȋL�q�i�R�����g�j���������̂ł����ǁA��肠���������Ă����܂����B
���̕��@�́A�L�b�g�ŗV�ڂ��̋��ȏ��ɂ���܂����B
�ʐ^�Q�Ɗ肢�܂��B
���ȏ��ł́A��������100�ʂ��Ƃ��āA�o�q�Q���t�Z���Ă��܂��B
�����A�v���O�����̕��́u�������P�ʁE�E�E�v�ƂȂ��Ă��܂��Ă��܂����̂ŁA�ԈႦ�ł��B���ȏ��ł�100�ʂ��ł��B
����̂悤�ɉϒ�R��Œ�������ꍇ�A������o�q2�͂ǂ̂悤�ɍl���Č��߂�̂ł��傤���H
�����Ȃ�Ɏv���ƁA
�ʐ^�̌����ɂ��A
�������i�o�q�Q�{�P�j�P/�i���쏈�����x���S�j
�ƂȂ��Ă���̂ŁA
���쏈�����x�@�P�l�g���i�Ƃ肠�����ɂ����l�ł��j
100�ʂ����i�o�q�Q�{�P�j�P/�i�P�l�g�����S�j
100�~4/1-�P���o�q�Q
�]���ā@�o�q�Q��309�ʂ�
�Ȃ̂ŁA������Ɋm�F�����������̂ŁA�o�q�Q���P�O�O�@�Ƃ��܂������A
�{���́A309�ʂ��ł����B
�ŁA�������܂����B
���̂Ƃ���A�k�d�c�̏�����ƁA�s���́A
�u�q���i���ƈÂ��Ȃ邯�ǁA
��������Ȃ����ɁA���ł��ɂȂ��Ė��邳�������Ă��Ȃ������ł��B
�������@�͗L��܂����H
�ȉ��ɐ�������Ă��܂����A���������ł́A�����ɂ͗ǂ�������܂���B
���������A���������A�Ȃ�Ƃ��������Ǝv���Ă͂��܂��B�L�b�g�ŗV�ڂ��̋��ȏ����A����̂��w�E�܂��čēx�ǂݍ���ł݂܂��B
1�T�ԑO�܂ł̓`���v���J���v���ł�������A�����ł��悭�����܂ŗ������Ǝv���Ă���Ƃ���ł��B
�\����܂���B
�Ƃ���ŁA�Q�T�O�Ƃ����������o�Ă��܂��ˁB
�Q�T�T���K���ł��傤�Ƃ̎��ł��ˁB
�������Q�T�T�ɂ���o�q�Q���t�Z���ăv���O�ɔ��f���Ă݂܂��B
> // ������1�ʕb�ɐݒ�i249 + 1�ʕb�j
> PR2 =249;
�Ƃ������̂ł��B
���̎��̎����́i249+1�j*4[us]=1000[us]=1ms�ł��B
�ŁA����̏ꍇ��
�i100+1�j*4��404us�ł��B
�����ƁAPWM��ADC�̃��J�j�Y���H�������Ɖ������Ă����������ǂ��ł��B
PWM���ƁA
PR2�������A�܂肱�̒l������ɓ�����܂��B
duty�l��HIGH��LOW�ɐ�ւ��l�ł��B(�ꍇ�ɂ���Ă͋t���ɐ�ς���ݒ肪������������܂�)
�^�C�}�[��0�ŏo�͂�HIGH�ɂȂ�A�^�C�}�[��duty�l��LOW�ɐ�ւ��܂��B
�u249�v�ƁA250��1�����������ɂ���̂�249���J�E���g���āA����0�ɂȂ�������HIGH�ɂȂ�̂�1�������܂��B
���������d�g�݂Ȃ̂ŁAPR2��101�i101/255�j�ɂ��āAADC�̒l�����̂܂ܓ���Ă��{�����[���̔����ȉ��̕�������
�������Ȃ��i�܂�A101/255�ȏ�ɂȂ�Ə��HIGH�j�ɂȂ��Ă���Ƒz�����܂��B
���o�I�ɂ͂ǂ��������ł��傤���H
�{�����[���̃t�������W���g���āA���邳�߂������̂Ȃ�APR2��255���K���ł��傤�B
�ܘ_�AADC�̒l��101/255�����������̂�duty�l�ɐݒ肵�Ă��ǂ��ł����ǁB
���ŁA
while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
�̕�������1��ŁA280us���x�̎��Ԃ���������܂���B�܂�APWM��1��̓_�ł��������擾���āA
��ւ��l�𑀍삵�Ă��܂��B
�������������͓K�x�ȃf�B���C����ꂽ�����ǂ��Ǝv���܂��B�i���̂܂܂őʖڂƂ�����ł͖����ł����ǁj
�܂�A
while(1) {
num = adconv();
CCPR1L = num/4 ;
__delay_ms(10);
}
���x�ɂ���̂��K�����ȁA�Ǝv������ł��B
�ŁA���������������Ɓi�܂��A���������Ȃ��Ă��ǂ��̂ł����ǁj
������܂����B
��while(1) {
CCPR1L = adconv()/4 ;
__delay_ms(10);
}
�ŁA�����Ӗ��ł��B
���ꂪ�ANo.1213�ŏ�����Arduino��
void loop() {
analogWrite(3,analogRead(A0)/4);
delay(10);
}
�ł��B��������delay(10);�������Ӗ��ŕt���Ă��܂��B
������܂����B
�NjL
����255�ɂ��Ăo�q�Q��1019�ɂ�����A
�����̋�͗ǂ��ł��B
TR 2018/11/20(Tue) 07:44 Re: �`�c�q�d�r
> �����ł������B�`���^�����O�h�~�ł��ˁB
�������A�����ł͂���܂���B
���̃}�C�R���́AADC�̑��u��1�ŁA������̃s����ADC���u�̊O���ŁA�}���`�v���N�T�Ő�ւ��Ďg���܂��B
����ŕ����̃s����ADC���g����悤�ɂ��Ă��܂��B
�ŁA�ڑ��s�����ւ���Ƃ������͈قȂ�d���Ɍq����A�Ƃ������ł��B���̍ۂ̌�v���̖h�~�ׂ̈ɁB1��ǂݔ������A������ƊԂ����肵�܂��B
���̃e�L�X�g�ł�4MHz�쓮��1MHz�T�C�N����1us/�J�E���g��PR2��99�Ȃ̂�
(99+1)*1us=100us�ł��B
�ŏ��̗�ł�1Mhz�쓮��250kHz�T�C�N��=4us/�J�E���g�ŁAPR2��249�ł��B�Ȃ̂ŁA
�i249+1�j*4��1000us=1ms�ł��B
����̂��̂�1Mhz�쓮��250kHz�T�C�N��=4us/�J�E���g�ŁAPR2��100�ł��B�Ȃ̂�
�i100+1�j*4=404us
�ƂȂ�܂��B�}�C�R���̑��x�͌��ɂȂ�쓮�N���b�N���狁�܂�܂��B
���J�E���g����1�T�C�N���i�J�E���g�j���Ԃ�����������������₷���Ǝv���܂��B
> �ϒ�R��Œ�������ꍇ�A������o�q2
�܂��A�{�����[���ɂ��ADC���͂ƁAPWM�o�͂̊ԂɊ֘A���͂���܂���B
�u�X�C�b�`����������LED��_��������v�Ƃ������̂��A���X�X�C�b�`��LED�Ƃ������W�̕���
�A�������Ă���̂Ɠ����ł��B
LED�̓K�������Ɋւ��Ă̓}�C�R���Ƃ͂��܂�W����܂���B
�l�ԂɂƂ���100Hz=10ms���������������Ƃ������������ƌ����Ă��܂��B
�Ȃ̂ŁA7�Z�O���͂�������Z�����̂ɂ��܂��B
�Ɩ��ŗ��p����Ȃ�X�Ɏ�����Z������K�v������ł��傤�B
�����g�����������Ė�肪�N���邱�Ƃ͖w�ǂ���܂���B�������A���g���������قǃm�C�Y��U�����Ղ��Ȃ鎖�A
�g�`������₷���Ȃ邱�Ƃ�����܂��B
�ŁA�{�����[���̎w���Ă���l�A�܂�A��R�l�̊�����PWM��duty�����v������A�Ƃ����l��������܂��B
��������ƃ{�����[����LED�̓d�͂����W�ɂȂ�܂��B
��Ő��������ʂ�A�܂��A�J�E���^�̓�����l���Ă��������B
�J�E���^��PR2�̒l�ɂȂ��0�ɖ߂�܂��B�܂�A0��PR2���J��Ԃ��J�E���^�ł��B
�����āAduty�l�ƃJ�E���g�l���r���āA�ǂ��炪�傫�����ŁAHIGH/LOW�o�͂����܂�܂��B�B
duty�l���傫������PR2�ȏ�Ȃ牽���ω������ɁAHIGH�o�͂ł��B
���Ԃ�\�����ŗD��ɂ������Ȃ�A�����iPR2+1�j��10�i���ł��肪�ǂ��l�ł��傤�ˁB
100��250���K�����Ǝv���܂��B�Ⴆ���\�����������ꍇ�Ȃǂ͂��̂܂�100�ł����ł��傤�B
ADC���ő�1023�Ȃ̂ŁA
<ADC>*100/1023�̌v�Z������duty�l�̃��W�X�^CCPR1L�ɓ���āA�\�������邱�ƂɂȂ�܂��B
�������A�]�肪�ł�̂ł�����ƌ��Ȋ��������܂��B
��ADC��0�`10��0�A11�`20��1�A�c�Ɩw�ǂ͈̔͂�10�ɂȂ�̂ł����ǁAMAX100�͈̔͂�1023�݂̂ɂȂ�܂��B
�����Ȃ�̂�����邽�߂ɁA<ADC+50>*100/1023�Ƃ����@������܂��B
�{�����[����PWM��������Ȃ�0xFF���ǂ��ł��B
ADC�l��4�Ŋ�����̂܂g���܂��B�܂�A�����܂��B
> ����255�ɂ��Ăo�q�Q��1019�ɂ�����A
�Ӗ�������܂���BPR2���W�X�^��8�r�b�g�Ȃ̂ŁA���̂܂�
PR2=0xFF;//����PR2=255;
�ł��B
PR2=1019;
�ƁA���肫��Ȃ��l�������Ə�ʌ����������
PR2=251;//1019%256=251
�Ɠ����Ӗ��ɂȂ�܂��B
�����Ȃ݂ɁAPWM��10�r�b�g�ł����ǁA����2�r�b�g�̓v���X�P�[�����g���܂��B
�Ȃ̂ŁA�v���X�P�[����1�F1�̍���̏ꍇ�͎����I�ɐ�̂Ă���悤�ȋC�����܂��B
�ڂ����̓f�[�^�V�[�g�Ŋm�F���ĉ������B
��L�̓v���X�P�[����1�F1�̂Ƃ��̓v���X�P�[���ł͂Ȃ��A�쓮�N���b�N������ɂȂ�悤�ł��B
�Ȃ̂ŁA10�r�b�g��PWM�ɂȂ�͕̂ς��Ȃ��A�Ƃ������ł����B
�������A�����ł͂���܂���B
���̃}�C�R���́AADC�̑��u��1�ŁA������̃s����ADC���u�̊O���ŁA�}���`�v���N�T�Ő�ւ��Ďg���܂��B
����ŕ����̃s����ADC���g����悤�ɂ��Ă��܂��B
�ŁA�ڑ��s�����ւ���Ƃ������͈قȂ�d���Ɍq����A�Ƃ������ł��B���̍ۂ̌�v���̖h�~�ׂ̈ɁB1��ǂݔ������A������ƊԂ����肵�܂��B
���̃e�L�X�g�ł�4MHz�쓮��1MHz�T�C�N����1us/�J�E���g��PR2��99�Ȃ̂�
(99+1)*1us=100us�ł��B
�ŏ��̗�ł�1Mhz�쓮��250kHz�T�C�N��=4us/�J�E���g�ŁAPR2��249�ł��B�Ȃ̂ŁA
�i249+1�j*4��1000us=1ms�ł��B
����̂��̂�1Mhz�쓮��250kHz�T�C�N��=4us/�J�E���g�ŁAPR2��100�ł��B�Ȃ̂�
�i100+1�j*4=404us
�ƂȂ�܂��B�}�C�R���̑��x�͌��ɂȂ�쓮�N���b�N���狁�܂�܂��B
���J�E���g����1�T�C�N���i�J�E���g�j���Ԃ�����������������₷���Ǝv���܂��B
> �ϒ�R��Œ�������ꍇ�A������o�q2
�܂��A�{�����[���ɂ��ADC���͂ƁAPWM�o�͂̊ԂɊ֘A���͂���܂���B
�u�X�C�b�`����������LED��_��������v�Ƃ������̂��A���X�X�C�b�`��LED�Ƃ������W�̕���
�A�������Ă���̂Ɠ����ł��B
LED�̓K�������Ɋւ��Ă̓}�C�R���Ƃ͂��܂�W����܂���B
�l�ԂɂƂ���100Hz=10ms���������������Ƃ������������ƌ����Ă��܂��B
�Ȃ̂ŁA7�Z�O���͂�������Z�����̂ɂ��܂��B
�Ɩ��ŗ��p����Ȃ�X�Ɏ�����Z������K�v������ł��傤�B
�����g�����������Ė�肪�N���邱�Ƃ͖w�ǂ���܂���B�������A���g���������قǃm�C�Y��U�����Ղ��Ȃ鎖�A
�g�`������₷���Ȃ邱�Ƃ�����܂��B
�ŁA�{�����[���̎w���Ă���l�A�܂�A��R�l�̊�����PWM��duty�����v������A�Ƃ����l��������܂��B
��������ƃ{�����[����LED�̓d�͂����W�ɂȂ�܂��B
��Ő��������ʂ�A�܂��A�J�E���^�̓�����l���Ă��������B
�J�E���^��PR2�̒l�ɂȂ��0�ɖ߂�܂��B�܂�A0��PR2���J��Ԃ��J�E���^�ł��B
�����āAduty�l�ƃJ�E���g�l���r���āA�ǂ��炪�傫�����ŁAHIGH/LOW�o�͂����܂�܂��B�B
duty�l���傫������PR2�ȏ�Ȃ牽���ω������ɁAHIGH�o�͂ł��B
���Ԃ�\�����ŗD��ɂ������Ȃ�A�����iPR2+1�j��10�i���ł��肪�ǂ��l�ł��傤�ˁB
100��250���K�����Ǝv���܂��B�Ⴆ���\�����������ꍇ�Ȃǂ͂��̂܂�100�ł����ł��傤�B
ADC���ő�1023�Ȃ̂ŁA
<ADC>*100/1023�̌v�Z������duty�l�̃��W�X�^CCPR1L�ɓ���āA�\�������邱�ƂɂȂ�܂��B
�������A�]�肪�ł�̂ł�����ƌ��Ȋ��������܂��B
��ADC��0�`10��0�A11�`20��1�A�c�Ɩw�ǂ͈̔͂�10�ɂȂ�̂ł����ǁAMAX100�͈̔͂�1023�݂̂ɂȂ�܂��B
�����Ȃ�̂�����邽�߂ɁA<ADC+50>*100/1023�Ƃ����@������܂��B
�{�����[����PWM��������Ȃ�0xFF���ǂ��ł��B
ADC�l��4�Ŋ�����̂܂g���܂��B�܂�A�����܂��B
> ����255�ɂ��Ăo�q�Q��1019�ɂ�����A
�Ӗ�������܂���BPR2���W�X�^��8�r�b�g�Ȃ̂ŁA���̂܂�
PR2=0xFF;//����PR2=255;
�ł��B
PR2=1019;
�ƁA���肫��Ȃ��l�������Ə�ʌ����������
PR2=251;//1019%256=251
�Ɠ����Ӗ��ɂȂ�܂��B
�����Ȃ݂ɁAPWM��10�r�b�g�ł����ǁA����2�r�b�g�̓v���X�P�[�����g���܂��B
�Ȃ̂ŁA�v���X�P�[����1�F1�̍���̏ꍇ�͎����I�ɐ�̂Ă���悤�ȋC�����܂��B
�ڂ����̓f�[�^�V�[�g�Ŋm�F���ĉ������B
��L�̓v���X�P�[����1�F1�̂Ƃ��̓v���X�P�[���ł͂Ȃ��A�쓮�N���b�N������ɂȂ�悤�ł��B
�Ȃ̂ŁA10�r�b�g��PWM�ɂȂ�͕̂ς��Ȃ��A�Ƃ������ł����B
�ҋ����b�N 2018/11/20(Tue) 12:15 No.1230 Re: �`�c�q�d�r
�����́B
�������A�l�o�k�`�a����̂o�v�l�Ƃ`�c�R���o�[�^�[�̋L����ǂ�ł��܂����B
�����͕��������悤�Ȋ��������܂��B
�m��1229
���ŁA
�@�@while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
�A�@num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
�B�@CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
�̕�������1��ŁA280us���x�̎��Ԃ���������܂���B
�Q�W�O�ʂ��Ƃ́A�@+�A+�B�̃v���O�������e��PIC�����Ȃ����Ԃł����H
�l�o�k�`�a�h�c�w�̃V���~���[�^�[�@�\���g���A�v���O�����̍�Ǝ��Ԃ�������̂��ȁH
����Ă݂����ǁA����B
���A__delay_ms(10);�͒lj����܂����B
�m��1230
����ADC��0�`10��0�A11�`20��1�A�c�Ɩw�ǂ͈̔͂�10�ɂȂ�̂ł����ǁAMAX100�͈̔͂�1023�݂̂ɂȂ�܂��B
�����Ȃ�̂�����邽�߂ɁA<ADC+50>*100/1023�Ƃ����@������܂��B
�ǂ�������Ȃ��̂ŁA�o�q�Q�͂Q�S�X�ʂ��ɂ��܂����B
�o�v�l�̑���Ƃ́A�����N���b�N�Ȃǂ���{�ɁA�[�q����ǂݎ�����A�i���O�d���Ƃ��ׂĂ̑���ɂȂ��ł��傤�B
���́A���ꂭ�炢�ɂ��܂��B
�m��1230
�������Ȃ݂ɁAPWM��10�r�b�g�ł����ǁA����2�r�b�g�̓v���X�P�[�����g���܂��B
�Ȃ̂ŁA�v���X�P�[����1�F1�̍���̏ꍇ�͎����I�ɐ�̂Ă���悤�ȋC�����܂��B
�ڂ����̓f�[�^�V�[�g�Ŋm�F���ĉ������B
�c�������b�������������߂�10�r�b�g�̓��A����2�r�b�g�iCCP1CON���W�X�^��DC1B�r�b�g�j
���̎��ł����H
�Ƃ������A�����܂Ńv���O������g�߂�悤�ɂȂ����̂Ŋ������ł��B
�������A�l�o�k�`�a����̂o�v�l�Ƃ`�c�R���o�[�^�[�̋L����ǂ�ł��܂����B
�����͕��������悤�Ȋ��������܂��B
�m��1229
���ŁA
�@�@while(1) { // �A�i���O�l�̕ϊ��ƓǍ��ݏ���
�A�@num = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
�B�@CCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
}
�̕�������1��ŁA280us���x�̎��Ԃ���������܂���B
�Q�W�O�ʂ��Ƃ́A�@+�A+�B�̃v���O�������e��PIC�����Ȃ����Ԃł����H
�l�o�k�`�a�h�c�w�̃V���~���[�^�[�@�\���g���A�v���O�����̍�Ǝ��Ԃ�������̂��ȁH
����Ă݂����ǁA����B
���A__delay_ms(10);�͒lj����܂����B
�m��1230
����ADC��0�`10��0�A11�`20��1�A�c�Ɩw�ǂ͈̔͂�10�ɂȂ�̂ł����ǁAMAX100�͈̔͂�1023�݂̂ɂȂ�܂��B
�����Ȃ�̂�����邽�߂ɁA<ADC+50>*100/1023�Ƃ����@������܂��B
�ǂ�������Ȃ��̂ŁA�o�q�Q�͂Q�S�X�ʂ��ɂ��܂����B
�o�v�l�̑���Ƃ́A�����N���b�N�Ȃǂ���{�ɁA�[�q����ǂݎ�����A�i���O�d���Ƃ��ׂĂ̑���ɂȂ��ł��傤�B
���́A���ꂭ�炢�ɂ��܂��B
�m��1230
�������Ȃ݂ɁAPWM��10�r�b�g�ł����ǁA����2�r�b�g�̓v���X�P�[�����g���܂��B
�Ȃ̂ŁA�v���X�P�[����1�F1�̍���̏ꍇ�͎����I�ɐ�̂Ă���悤�ȋC�����܂��B
�ڂ����̓f�[�^�V�[�g�Ŋm�F���ĉ������B
�c�������b�������������߂�10�r�b�g�̓��A����2�r�b�g�iCCP1CON���W�X�^��DC1B�r�b�g�j
���̎��ł����H
�Ƃ������A�����܂Ńv���O������g�߂�悤�ɂȂ����̂Ŋ������ł��B
TR 2018/11/20(Tue) 20:58 Re: �`�c�q�d�r
�u1��Łv�A�Ƃ����͇̂A�ƇB�Ƃ����Ӗ��ł��B
�ܘ_����͋쓮�N���b�N�ɂ���đ傫���ϓ����܂��B
�V�~�����[�^�ňȑO���ׂ��̂𗘗p���Ċ��Z���܂����B
����A���ڒ��ׂ���ł͖����ł��B
�ȑO���ׂ�����4MHz����̎���ADC�ϊ���68us�������Ǝv���܂��B
����4�{�ʂł��B�B��2�T�C�N����8us���x�ł��傤�B
> �o�v�l�̑���Ƃ́A�����N���b�N�Ȃǂ���{�ɁA�[�q����ǂݎ�����A�i���O�d���Ƃ��ׂĂ̑���ɂȂ��ł��傤�B
������APWM��ADC�́A�S���̕ʕ��ł��BADC�͓d���v�ł��BPWM�͍����̓_�łł��B
����͂����g�ݍ��킹�������ł��B�܂��A�����������g�������悭����Ƃ͎v���܂����ǁB
�����A���܂Ō����܂���ł������ǁAADC�⎞�ԂƔ��W�œ��삳����̂ł͂Ȃ��A�ݏ�H�̂悤�ɂ��邱�Ƃ�����܂��B
�܂�A8�i�K�̖��邳�Ƃ��āA�ϓ���32�A64�A96�A128�c256�ł͂Ȃ��A2,4,8,16�c256�̂悤�ɐi�s�������肵�܂��B
�ϓ����肾�Ƌ}�ɖ��邭�Ȃ�A���邢�����ł͂��܂�ω��������܂���B�t�ɈÂ������͋}�ɕω����Ă���悤�Ɋ����܂��B
100�����i���j�̌v�Z�u<ADC>*100/1023�v���ƁA�����̂ł����4�����̎��ɂ��Ă݂�Ɓu<ADC>*4/1023�v�ɂȂ�܂��B
�ł����̌v�Z������ADC�̒l��0�`255����0�ł��B256�`511��1�ł��B512�`767��2�ł��B768�`1022��3�ł��B�����āA1023������4�ɂȂ�܂��B
�܂��A����̎��Ƃ͂��܂�W�Ȃ��b�ł��B
> �c�������b�������������߂�10�r�b�g�̓��A����2�r�b�g�iCCP1CON���W�X�^��DC1B�r�b�g�j
> ���̎��ł����H
�����ł��B���̔�r�Ώۂ̃^�C�}�[�̕��ł��B
�^�C�}�[�̂��̕�����TIMER2�̃J�E���g�O�ł��B�Ȃ̂ŁA�J�E���g���Ă��鐔�l�͓ǂݏo���܂���B
�v���X�P�[���̃J�E���^�������g���Ă���A�Ƃ����̂�����o�����Ă����̂ł����A
1:1�Ƃ������Ƃ̓v���X�P�[�����g���Ă��܂���B
�Ȃ̂ŁATIMER2�݂̂Ŕ�r���Ă���̂ł́H�Ǝv�����̂ł����A�쓮�N���b�N�����p����Ă���A�Ƃ����L�q�������܂����B
duty�l�̉���2bit���L���ł��B
���(����)�����8�r�b�g�w��ŁA��r(duty�l)��10�r�b�g�w��A�Ƃ����_�͔����\���ł��ˁB
�����āA�{�̂ƂȂ�^�C�}�[������2�r�b�g�͌����Ȃ������ō���Ă��܂��B
�ܘ_����͋쓮�N���b�N�ɂ���đ傫���ϓ����܂��B
�V�~�����[�^�ňȑO���ׂ��̂𗘗p���Ċ��Z���܂����B
����A���ڒ��ׂ���ł͖����ł��B
�ȑO���ׂ�����4MHz����̎���ADC�ϊ���68us�������Ǝv���܂��B
����4�{�ʂł��B�B��2�T�C�N����8us���x�ł��傤�B
> �o�v�l�̑���Ƃ́A�����N���b�N�Ȃǂ���{�ɁA�[�q����ǂݎ�����A�i���O�d���Ƃ��ׂĂ̑���ɂȂ��ł��傤�B
������APWM��ADC�́A�S���̕ʕ��ł��BADC�͓d���v�ł��BPWM�͍����̓_�łł��B
����͂����g�ݍ��킹�������ł��B�܂��A�����������g�������悭����Ƃ͎v���܂����ǁB
�����A���܂Ō����܂���ł������ǁAADC�⎞�ԂƔ��W�œ��삳����̂ł͂Ȃ��A�ݏ�H�̂悤�ɂ��邱�Ƃ�����܂��B
�܂�A8�i�K�̖��邳�Ƃ��āA�ϓ���32�A64�A96�A128�c256�ł͂Ȃ��A2,4,8,16�c256�̂悤�ɐi�s�������肵�܂��B
�ϓ����肾�Ƌ}�ɖ��邭�Ȃ�A���邢�����ł͂��܂�ω��������܂���B�t�ɈÂ������͋}�ɕω����Ă���悤�Ɋ����܂��B
100�����i���j�̌v�Z�u<ADC>*100/1023�v���ƁA�����̂ł����4�����̎��ɂ��Ă݂�Ɓu<ADC>*4/1023�v�ɂȂ�܂��B
�ł����̌v�Z������ADC�̒l��0�`255����0�ł��B256�`511��1�ł��B512�`767��2�ł��B768�`1022��3�ł��B�����āA1023������4�ɂȂ�܂��B
�܂��A����̎��Ƃ͂��܂�W�Ȃ��b�ł��B
> �c�������b�������������߂�10�r�b�g�̓��A����2�r�b�g�iCCP1CON���W�X�^��DC1B�r�b�g�j
> ���̎��ł����H
�����ł��B���̔�r�Ώۂ̃^�C�}�[�̕��ł��B
�^�C�}�[�̂��̕�����TIMER2�̃J�E���g�O�ł��B�Ȃ̂ŁA�J�E���g���Ă��鐔�l�͓ǂݏo���܂���B
�v���X�P�[���̃J�E���^�������g���Ă���A�Ƃ����̂�����o�����Ă����̂ł����A
1:1�Ƃ������Ƃ̓v���X�P�[�����g���Ă��܂���B
�Ȃ̂ŁATIMER2�݂̂Ŕ�r���Ă���̂ł́H�Ǝv�����̂ł����A�쓮�N���b�N�����p����Ă���A�Ƃ����L�q�������܂����B
duty�l�̉���2bit���L���ł��B
���(����)�����8�r�b�g�w��ŁA��r(duty�l)��10�r�b�g�w��A�Ƃ����_�͔����\���ł��ˁB
�����āA�{�̂ƂȂ�^�C�}�[������2�r�b�g�͌����Ȃ������ō���Ă��܂��B
�ҋ����b�N 2018/11/20(Tue) 22:56 No.1232 Re: �`�c�q�d�r
 ���̇@�`�B�̃v���O�������s���Ԃ�������܂��B
���̇@�`�B�̃v���O�������s���Ԃ�������܂��B122�ʂ����Əo�܂����B
while(1) {
// �A�i���O�l�̕ϊ��ƓǍ��ݏ���
�@ adconv();
�Anum = adconv(); //�q�`0����d����ǂݍ��l��temp��num�ɑ��
�BCCPR1L = num/4 ; // 4�Ŋ����ď�ʂW�r�b�g�����o���A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
__delay_ms(10);
����Řb�����łł����A
�ҋ����b�N�������Ă��邱�ƂŁA�o�h�b�̌��_�ł����A
�����������Ă��܂����B
�`�c�R���o�[�^�[�ɂ͑����̐ݒ肪�L��܂��B
�����ʐ^�E���ł��B
���������ǂ��Ǝv���܂����A��ԑ����̂́A2�s�������ł����H
�P����2�s��������I��ł悢�̂ł��傤���H
TR 2018/11/21(Wed) 15:39 Re: �`�c�q�d�r
> ���������ǂ��Ǝv���܂����A��ԑ����̂́A2�s�������ł����H
�ܘ_�A���������ǂ��ƌ����܂����ǁA�M�����Ƃ̌��ˍ���������܂��B
�܂��A�v���̉�������قǁA���̍�Ƃ̎ז��ɂȂ�ꍇ������܂��B
�܂��A����̏ꍇ�́A
> while(ADCON0bits.GO_DONE); //�ϊ������҂�
�ƃE�F�C�g���Ă��܂�����A���������ǂ��ł��ˁB
����̂悤�ȃE�F�C�g����ꍇ�ƁA���������荞�݂�����ꍇ������܂��B
�ŁA����i1MHz�쓮�j�̏ꍇ�A�ݒ���ԑ����̂́A2Tosc�ɂȂ�܂��B
�����A4MHz�쓮�ɂ����ꍇ��8Tosc�ł��B
�����ǂ��A�������1��2�x�����������������Ǝv���܂��B
�����g�͑���o���邬�肬��̃��C���͎g���܂���B
�ܘ_�A���������ǂ��ƌ����܂����ǁA�M�����Ƃ̌��ˍ���������܂��B
�܂��A�v���̉�������قǁA���̍�Ƃ̎ז��ɂȂ�ꍇ������܂��B
�܂��A����̏ꍇ�́A
> while(ADCON0bits.GO_DONE); //�ϊ������҂�
�ƃE�F�C�g���Ă��܂�����A���������ǂ��ł��ˁB
����̂悤�ȃE�F�C�g����ꍇ�ƁA���������荞�݂�����ꍇ������܂��B
�ŁA����i1MHz�쓮�j�̏ꍇ�A�ݒ���ԑ����̂́A2Tosc�ɂȂ�܂��B
�����A4MHz�쓮�ɂ����ꍇ��8Tosc�ł��B
�����ǂ��A�������1��2�x�����������������Ǝv���܂��B
�����g�͑���o���邬�肬��̃��C���͎g���܂���B
�ҋ����b�N 2018/11/21(Wed) 18:01 No.1234 Re: �`�c�q�d�r
>�����ǂ��A�������1��2�x�����������������Ǝv���܂��B
�����g�͑���o���邬�肬��̃��C���͎g���܂���B
������܂����B
���́A�����N���b�N���P�l�����ł��A
����������Ƒ�������A�S�̂̑��x�͑����Ȃ�̂ł����H
����ƁA�m��1223�̎ʐ^�ɂ���f�[�^�V�[�g�̒��ӏ������O�[�O���|���������@��
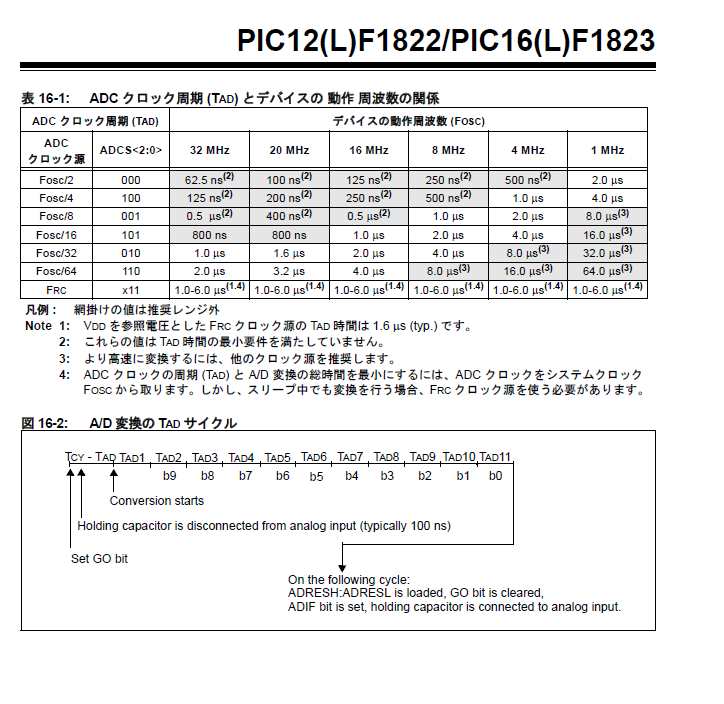
��1�FRC�\�[�X�̕W��TAD���Ԃ�4��s�ł����A2~6��s�̊Ԃŕω�����\��������܂��B
����T�C�g�Ō����܂����B
�@TAD=�iPIC�N���b�N�̎����j�~�iTosc�j
����́AOSCCON = 0x40; //�N���b�N���g����1MHz�ɐݒ�@��1�ʂ�
�s�������́A���݁A2�s�������Ȃ̂ŁA�m��1223�ʐ^�̃f�[�^�V�[�g�ɂ��
1.25�l�����@���@0.8�ʂ�
�s���������P�ʂ��@�~�@0.8�ʂ�
�s��������0.8�@�@�ƂȂ��Ăn���ł��傤���H
�Ƃ���������A
Operation�̕����|����̂ł����H
�����g�͑���o���邬�肬��̃��C���͎g���܂���B
������܂����B
���́A�����N���b�N���P�l�����ł��A
����������Ƒ�������A�S�̂̑��x�͑����Ȃ�̂ł����H
����ƁA�m��1223�̎ʐ^�ɂ���f�[�^�V�[�g�̒��ӏ������O�[�O���|���������@��
��1�FRC�\�[�X�̕W��TAD���Ԃ�4��s�ł����A2~6��s�̊Ԃŕω�����\��������܂��B
����T�C�g�Ō����܂����B
�@TAD=�iPIC�N���b�N�̎����j�~�iTosc�j
����́AOSCCON = 0x40; //�N���b�N���g����1MHz�ɐݒ�@��1�ʂ�
�s�������́A���݁A2�s�������Ȃ̂ŁA�m��1223�ʐ^�̃f�[�^�V�[�g�ɂ��
1.25�l�����@���@0.8�ʂ�
�s���������P�ʂ��@�~�@0.8�ʂ�
�s��������0.8�@�@�ƂȂ��Ăn���ł��傤���H
�Ƃ���������A
Operation�̕����|����̂ł����H
TR 2018/11/21(Wed) 19:26 Re: �`�c�q�d�r
��ƂȂ����B�Ԉ�������������Ă��܂��܂����B
��{��1.6us�`6.4us�̊ԂɂȂ�悤�ɑI������A�ƌ������݂����ł��B
�Ȃ̂ŁA1MHz�쓮�i1us�����j�̏ꍇ�́A2TOSC��4TOSC�̂ǂ��炩�ɂ���A�ƌ������ɂȂ�Ǝv���܂��B
��萄�������̂�4us�ɂȂ�4TOSC�Ȃ̂ł��傤���ǁA2TOSC�ł��S�����͂Ȃ��Ǝv���܂��B
���܂�A2TOSC�̑I���̓M���M���Ƃ������ł͂Ȃ��A���������͈͂̒l�A�Ƃ������B
�܂��A��ԉ���RC��I�����Ă����̂�����Ƃ������܂����B����͂����悻4us�ɂȂ�RC�ł��B
�����I�����Ă����A1MHz�쓮�̃\�[�X�ł��A4MHz�쓮�̃\�[�X�ł����ʂōς݂܂��B
�܂��Asleep�Ƃ����@�\���g��������ADC�ϊ����s���������ɂ͂���RC����I�����Ă���K�v������܂��B
�������Ȃ�Ƀf�[�^�V�[�g��ǂݎ�������z�ł����A�m�͂���܂���B
��{��1.6us�`6.4us�̊ԂɂȂ�悤�ɑI������A�ƌ������݂����ł��B
�Ȃ̂ŁA1MHz�쓮�i1us�����j�̏ꍇ�́A2TOSC��4TOSC�̂ǂ��炩�ɂ���A�ƌ������ɂȂ�Ǝv���܂��B
��萄�������̂�4us�ɂȂ�4TOSC�Ȃ̂ł��傤���ǁA2TOSC�ł��S�����͂Ȃ��Ǝv���܂��B
���܂�A2TOSC�̑I���̓M���M���Ƃ������ł͂Ȃ��A���������͈͂̒l�A�Ƃ������B
�܂��A��ԉ���RC��I�����Ă����̂�����Ƃ������܂����B����͂����悻4us�ɂȂ�RC�ł��B
�����I�����Ă����A1MHz�쓮�̃\�[�X�ł��A4MHz�쓮�̃\�[�X�ł����ʂōς݂܂��B
�܂��Asleep�Ƃ����@�\���g��������ADC�ϊ����s���������ɂ͂���RC����I�����Ă���K�v������܂��B
�������Ȃ�Ƀf�[�^�V�[�g��ǂݎ�������z�ł����A�m�͂���܂���B
�ҋ����b�N 2018/11/22(Thu) 00:00 No.1236 Re: �`�c�q�d�r
�p�\�R���ł��A�N���b�N���́A�傫�����A�Q�l�����S�l�����Ƃ�������B
�o�h�b�������N���b�N����傫���ݒ肵�������A�o�h�b�̓��쑬�x�������Ȃ�̂ł��傤���H
���́A1�l�����ɐݒ�B
TAD=�iPIC�N���b�N�̎����j�~�iTosc�j
���̎��͍����Ă����悤�ł��ˁB
�NjL
�����o�h�b�͂�͂�A���{��̃f�[�^�V�[�g�������������ǂ��ł��ˁB
16�e1823�@�@����ɋ߂��z16�e1827
http://akizukidenshi.com/catalog/g/gI-04430/
�ł���A
�s�`�c���P�ʂ��~�Q�s������
�s�`�c��2�ʂ�
�ł��q�b�Ƃ������I�������������킯�ł��ˁB
�L��������܂��B
���{��̃f�[�^�V�[�g������o�h�b16�e1823���~�����B
�o�h�b�������N���b�N����傫���ݒ肵�������A�o�h�b�̓��쑬�x�������Ȃ�̂ł��傤���H
���́A1�l�����ɐݒ�B
TAD=�iPIC�N���b�N�̎����j�~�iTosc�j
���̎��͍����Ă����悤�ł��ˁB
�NjL
�����o�h�b�͂�͂�A���{��̃f�[�^�V�[�g�������������ǂ��ł��ˁB
16�e1823�@�@����ɋ߂��z16�e1827
http://akizukidenshi.com/catalog/g/gI-04430/
�ł���A
�s�`�c���P�ʂ��~�Q�s������
�s�`�c��2�ʂ�
�ł��q�b�Ƃ������I�������������킯�ł��ˁB
�L��������܂��B
���{��̃f�[�^�V�[�g������o�h�b16�e1823���~�����B
TR 2018/11/22(Thu) 07:19 Re: �`�c�q�d�r
���x�̍l�����́APC�Ɠ����ł��B
�ʏ�A4MHz�쓮�Ȃ�1MHz�쓮��4�{���������Ă��܂�����A1MHz��4MHz�Ƃ����
���쎞�Ԃ�1/4�ɂȂ�܂��B
�������A����̂悤��ADC�́AADC�̕ϊ����x�͂���͈͓��A�܂���ɂ��Ăق����A�ƌ������ł��B
> TAD=�iPIC�N���b�N�̎����j�~�iTosc�j
> ���̎��͍����Ă����悤�ł��ˁB
�������A
�iPIC�N���b�N�̎����j�ƁiTosc�j�͓���ł��B
Fosc�u���g���v=1/Tosc�@�ł��B
�ŁA
TAD���u1.6us�`6.4us�̊ԂɂȂ�悤�Ɂv�{����I������A�ƌ������ł��B
1MHz�쓮�Ȃ�Tosc��1us�ł��B�����Đݒ�ł���{���́A1,2,4,8�A�c�Ȃ̂ŁA
2��4��I�����鎖�ɂȂ�܂��B
RC�͂����I�����邾���ł��B�v�Z�͂���܂���B�����悻4us���W���l�ɂȂ�悤�ɍ���Ă��邯�ǂ��A
2�`6us�̃A�o�E�g�͈̔͂Ƃ����ۏ��Ȃ��A�ƌ������ł��B
�NjL
16F1827���ƁA������Ɛ��\���オ���āA�����͈͂��L�����Ă��܂��B
���l�͌������Ȃ������ł����ǁA�Ⴆ�A0.8us�`6.4us�̂悤�ɑ������x�̂ق����L�������̂��Ǝv���܂��B
�Ȃ̂ŁATAD��1us�������͈͂ɂȂ��Ă��܂��ˁB
�����āARC�̕W���l��1.6us�ɂȂ��Ă��܂��B
�ʏ�A4MHz�쓮�Ȃ�1MHz�쓮��4�{���������Ă��܂�����A1MHz��4MHz�Ƃ����
���쎞�Ԃ�1/4�ɂȂ�܂��B
�������A����̂悤��ADC�́AADC�̕ϊ����x�͂���͈͓��A�܂���ɂ��Ăق����A�ƌ������ł��B
> TAD=�iPIC�N���b�N�̎����j�~�iTosc�j
> ���̎��͍����Ă����悤�ł��ˁB
�������A
�iPIC�N���b�N�̎����j�ƁiTosc�j�͓���ł��B
Fosc�u���g���v=1/Tosc�@�ł��B
�ŁA
TAD���u1.6us�`6.4us�̊ԂɂȂ�悤�Ɂv�{����I������A�ƌ������ł��B
1MHz�쓮�Ȃ�Tosc��1us�ł��B�����Đݒ�ł���{���́A1,2,4,8�A�c�Ȃ̂ŁA
2��4��I�����鎖�ɂȂ�܂��B
RC�͂����I�����邾���ł��B�v�Z�͂���܂���B�����悻4us���W���l�ɂȂ�悤�ɍ���Ă��邯�ǂ��A
2�`6us�̃A�o�E�g�͈̔͂Ƃ����ۏ��Ȃ��A�ƌ������ł��B
�NjL
16F1827���ƁA������Ɛ��\���オ���āA�����͈͂��L�����Ă��܂��B
���l�͌������Ȃ������ł����ǁA�Ⴆ�A0.8us�`6.4us�̂悤�ɑ������x�̂ق����L�������̂��Ǝv���܂��B
�Ȃ̂ŁATAD��1us�������͈͂ɂȂ��Ă��܂��ˁB
�����āARC�̕W���l��1.6us�ɂȂ��Ă��܂��B
�ҋ����b�N 2018/11/22(Thu) 08:40 No.1238 Duty���ς���v���O����
�ȉ��̃v���O�����łk�d�c���Â��Ȃ�A���邭�Ȃ���J��Ԃ��Ǝv�����̂ł����A
�_�������܂܂Ɍ����܂��B
�����������̂ł��傤���H
duty��ς��鐔�l��50��1000�͂��������ł��B
����m�F�����������̂ŁA�K���Ȑ��l�ł��B
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON= 1;
// LED��PWM����
// �f���[�e�[���10%100%�̐���ɂ���
while(1) {
// 5% -> 100%�̐���
for(duty=50; duty<=1000; duty++) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(100);
}
// 100% -> 5%�̐���
for(duty=1000; duty>=50; duty--) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(100);
}
}
�_�������܂܂Ɍ����܂��B
�����������̂ł��傤���H
duty��ς��鐔�l��50��1000�͂��������ł��B
����m�F�����������̂ŁA�K���Ȑ��l�ł��B
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON= 1;
// LED��PWM����
// �f���[�e�[���10%100%�̐���ɂ���
while(1) {
// 5% -> 100%�̐���
for(duty=50; duty<=1000; duty++) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(100);
}
// 100% -> 5%�̐���
for(duty=1000; duty>=50; duty--) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(100);
}
}
TR 2018/11/11(Sun) 14:53 Re: Duty����v���O����
��肭�����܂����B
���삵�Ȃ��������R��������܂����B
����́A�b�����������ł����B
�F�X�ƒ��ׂ��̂ŁA���̎g�����ȂǁA������Ƃ͕�����悤�ɂȂ�܂����B
// PIC16F88 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM (void);
void InitTimer2 (void);
// ���C����
void main (void)
{
// 1,2,17,18�[�q����o�͒[�q�ɐݒ�
CMCON = 0x07;
// �d�����x���̏����ݒ�
PORTA = 0xFF;
PORTB = 0xFF;
// ���o�͐ݒ�
TRISA = 0x20;
TRISB = 0x00;
OSCCON = 0x40; //�N���b�N���g����1MHz�ɐݒ�
ANSEL = 0x00; //���ׂẴs�����f�W�^�����[�h�ɐݒ�
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
unsigned short duty;// PWM�̃f���[�e�B�[�T�C�N��
while(1){
// 5% -> 100%�̐���
for(duty=50; duty<=1000;++duty) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(10);
}
// 100% -> 5%�̐���
for(duty=1000; duty>=50; duty--) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(10);
}
}
}
// PWM���[�h�ݒ��
void InitPWM (void)
{
// RB3�[�q���o�͒[�q�ɐݒ�
TRISBbits.TRISB3 = 0;
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3=1;
CCP1CONbits.CCP1M2=1;
CCP1CONbits.CCP1M1=0;
CCP1CONbits.CCP1M0=0;
// ������1�ʕb�ɐݒ�i249 + 1�ʕb�j
PR2 =249;
// �f���[�e�B�[�T�C�N����0.5ms
CCPR1L = 500/4;
CCP1CONbits.CCP1X=0;
CCP1CONbits.CCP1Y=0;
}
// �^�C�}2�ݒ��
void InitTimer2 (void)
{
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1=0;
T2CONbits.T2CKPS0=0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON= 1;
}
���삵�Ȃ��������R��������܂����B
����́A�b�����������ł����B
�F�X�ƒ��ׂ��̂ŁA���̎g�����ȂǁA������Ƃ͕�����悤�ɂȂ�܂����B
// PIC16F88 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM (void);
void InitTimer2 (void);
// ���C����
void main (void)
{
// 1,2,17,18�[�q����o�͒[�q�ɐݒ�
CMCON = 0x07;
// �d�����x���̏����ݒ�
PORTA = 0xFF;
PORTB = 0xFF;
// ���o�͐ݒ�
TRISA = 0x20;
TRISB = 0x00;
OSCCON = 0x40; //�N���b�N���g����1MHz�ɐݒ�
ANSEL = 0x00; //���ׂẴs�����f�W�^�����[�h�ɐݒ�
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
unsigned short duty;// PWM�̃f���[�e�B�[�T�C�N��
while(1){
// 5% -> 100%�̐���
for(duty=50; duty<=1000;++duty) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(10);
}
// 100% -> 5%�̐���
for(duty=1000; duty>=50; duty--) {
CCPR1L = duty / 4; // ���8�r�b�g
CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
__delay_ms(10);
}
}
}
// PWM���[�h�ݒ��
void InitPWM (void)
{
// RB3�[�q���o�͒[�q�ɐݒ�
TRISBbits.TRISB3 = 0;
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3=1;
CCP1CONbits.CCP1M2=1;
CCP1CONbits.CCP1M1=0;
CCP1CONbits.CCP1M0=0;
// ������1�ʕb�ɐݒ�i249 + 1�ʕb�j
PR2 =249;
// �f���[�e�B�[�T�C�N����0.5ms
CCPR1L = 500/4;
CCP1CONbits.CCP1X=0;
CCP1CONbits.CCP1Y=0;
}
// �^�C�}2�ݒ��
void InitTimer2 (void)
{
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1=0;
T2CONbits.T2CKPS0=0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON= 1;
}
TR 2018/11/12(Mon) 12:14 Re: Duty����v���O����
�s�q����C�ҋ����b�N����C�����́B
�s�q����C�撣���Ă܂��ˁB
�o�v�l���[�h���K���Ă݂܂����B
�s�q����̏����ꂽ�v���O�����ł����C
for(duty=50; duty<=1000;++duty) {
�@CCPR1L = duty / 4; // ���8�r�b�g
�@CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
�@CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
�@__delay_ms(10);
}
��
�@CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
�@CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b
�����ł����C�r�b�g�̑���Ȃ̂ŁC�O���P���͂���̂ł����C
�P�O�i����������Ƃǂ��Ȃ�̂ł��傤�ˁB
�����ƁC���ʂ̂P�r�b�g�ڂƂQ�r�b�g�߂����ꂼ�����
�̂ł��傤���B
������ƕ�����Ȃ��Ƃ���ł��B
���������āC
�@CCP1CONbits.CCP1X=((duty>>1)&1);// duty��1�r�b�g�ڑ��
�@CCP1CONbits.CCP1Y=(duty&1);// duty�̂O�r�b�g�ڂ���
�݂����ɂ��Ȃ��Ƃ��߂�������܂���B
�s�q����C�撣���Ă܂��ˁB
�o�v�l���[�h���K���Ă݂܂����B
�s�q����̏����ꂽ�v���O�����ł����C
for(duty=50; duty<=1000;++duty) {
�@CCPR1L = duty / 4; // ���8�r�b�g
�@CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
�@CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b�g
�@__delay_ms(10);
}
��
�@CCP1CONbits.CCP1X=duty;// CCP1X�r�b�g
�@CCP1CONbits.CCP1Y=duty;// CCP1Y�r�b
�����ł����C�r�b�g�̑���Ȃ̂ŁC�O���P���͂���̂ł����C
�P�O�i����������Ƃǂ��Ȃ�̂ł��傤�ˁB
�����ƁC���ʂ̂P�r�b�g�ڂƂQ�r�b�g�߂����ꂼ�����
�̂ł��傤���B
������ƕ�����Ȃ��Ƃ���ł��B
���������āC
�@CCP1CONbits.CCP1X=((duty>>1)&1);// duty��1�r�b�g�ڑ��
�@CCP1CONbits.CCP1Y=(duty&1);// duty�̂O�r�b�g�ڂ���
�݂����ɂ��Ȃ��Ƃ��߂�������܂���B
mabo 2018/11/13(Tue) 00:22 No.1199 Re: Duty����v���O����
mabo����A���X�L��������܂��B
�����A10�i�������ɂ��Ă悢���̂��Ɗ����Ă��܂����A
�c�[�����{����̉����\��t���܂��B
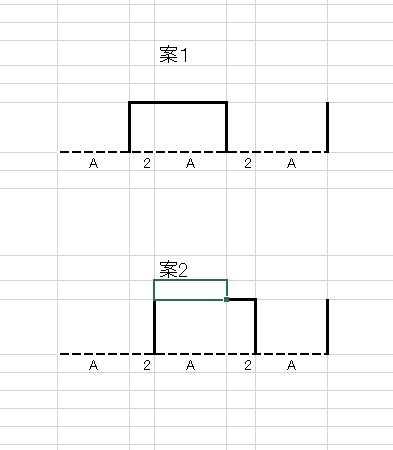
���āA500���킴�킴2�i���ɕϊ����āA���̏��8�r�b�g�≺��2�r�b�g�����߂�͖̂ʓ|�ł��̂ŁA�y�ȕ��@�Ńv���O�������������Ƃɂ��܂��傤�B
�܂��A���8�r�b�g�̋��ߕ��ł��B2�i���\���ł́A2�Ŋ����1���E�Ɉړ����܂��B��ԉE�̌��͖����Ȃ�܂��B
Pic app 4 binary calculation
�����2�Ŋ������1���E�Ɉړ����܂��B�Ƃ������Ƃ́A500��4�Ŋ���Ώ��8�r�b�g�����o�����Ƃ��ł��܂��B
�Ƃ������ƂŁACCPR1L�ɏ��8�r�b�g��ݒ肷��ɂ́A
CCPR1L = 500/4;
�Ə����悢���ƂɂȂ�܂��B
�����A10�i�������ɂ��Ă悢���̂��Ɗ����Ă��܂����A
�c�[�����{����̉����\��t���܂��B
���āA500���킴�킴2�i���ɕϊ����āA���̏��8�r�b�g�≺��2�r�b�g�����߂�͖̂ʓ|�ł��̂ŁA�y�ȕ��@�Ńv���O�������������Ƃɂ��܂��傤�B
�܂��A���8�r�b�g�̋��ߕ��ł��B2�i���\���ł́A2�Ŋ����1���E�Ɉړ����܂��B��ԉE�̌��͖����Ȃ�܂��B
Pic app 4 binary calculation
�����2�Ŋ������1���E�Ɉړ����܂��B�Ƃ������Ƃ́A500��4�Ŋ���Ώ��8�r�b�g�����o�����Ƃ��ł��܂��B
�Ƃ������ƂŁACCPR1L�ɏ��8�r�b�g��ݒ肷��ɂ́A
CCPR1L = 500/4;
�Ə����悢���ƂɂȂ�܂��B
TR 2018/11/13(Tue) 07:16 Re: Duty����v���O����
�s�q����C�ҋ����b�N����C���͂悤�������܂��B
�����8�r�b�g
�����o���ɂɂ́C�E�ɁC�Q�r�b�g���V�t�g�ł�����C
�Ӗ��I�ɂ́C�S�Ŋ��邱�ƂƓ��ӂł���ˁB
���̂ւ�̑��삪�ʓ|�ł���ˁB
���ʃr�b�g�̐ݒ�ɂ́C
CCP1CONbits.DC1B
���s�q����̂��������c�[�����{�ł͎g���Ă܂����ˁB
CCP1CONbits.DC1B = 500
���邢�́C
CCP1CONbits.DC1B = 500 && 0b11;
�̂悤�ɏ����Ă���܂����B
CCP1CONbits.DC1B
���ƁC
CCP1CONbits.CCP1X
CCP1CONbits.CCP1Y
���g��Ȃ��Ă���x�ł��ނ݂����ł��ˁB
�o�v�l�͂�������Y��Ă��܂����B
�����8�r�b�g
�����o���ɂɂ́C�E�ɁC�Q�r�b�g���V�t�g�ł�����C
�Ӗ��I�ɂ́C�S�Ŋ��邱�ƂƓ��ӂł���ˁB
���̂ւ�̑��삪�ʓ|�ł���ˁB
���ʃr�b�g�̐ݒ�ɂ́C
CCP1CONbits.DC1B
���s�q����̂��������c�[�����{�ł͎g���Ă܂����ˁB
CCP1CONbits.DC1B = 500
���邢�́C
CCP1CONbits.DC1B = 500 && 0b11;
�̂悤�ɏ����Ă���܂����B
CCP1CONbits.DC1B
���ƁC
CCP1CONbits.CCP1X
CCP1CONbits.CCP1Y
���g��Ȃ��Ă���x�ł��ނ݂����ł��ˁB
�o�v�l�͂�������Y��Ă��܂����B
mabo 2018/11/13(Tue) 08:46 No.1201 Re: Duty����v���O����
10�i�������W�X�^��=�ɂ��Ă�OK�݂����ł��ˁI
CCP1CONbits.DC1B 
����ł����A16F88�̏ꍇ�A�����悤�ł����̂ŁA1�o�C�g�ÂƂ��܂����B
�{���ɖY���ق��������@(��)
CCP1CONbits.DC1B 
����ł����A16F88�̏ꍇ�A�����悤�ł����̂ŁA1�o�C�g�ÂƂ��܂����B
�{���ɖY���ق��������@(��)
TR 2018/11/13(Tue) 10:49 No.1202 Re: Duty����v���O����
�c�[�����{�̘b�͕ʂ̃}�C�R���̘b�ł��B
CCP1CONbits.DC1B��2bit�̊�ł��B
�Ȃ̂ŁA4�Ŋ������]�肪����܂��B
CCP1CONbits.CCP1X=500;
CCP1CONbits.CCP1Y=500;
�Ȃ�A���R�A�����Ƃ�0�ł��B
1bit�̊�(��2��)�����Ȃ����ɂ������������������ƁA�J��オ�������͏����܂��B
�ȒP�Ɍ�����2�Ŋ������]��ł��B
duty�䂪1�Ȃ画��ł��傤�H
CCP1CONbits.CCP1X=1;
CCP1CONbits.CCP1Y=1;
�Ə����āAX�̕���0�ɂȂ锤�Ȃ��ł���ˁH
MABO����̌����ʂ�̏������K�v�ł��B
�܂��A�[���Ȃ̂ŋC�t���Ȃ��\�����傫���ł����ǁB
�c�Ǝv������
> CCP1CONbits.DC1B = 500 && 0b11;
����͑ʖڂł��B���̃T�C�g�ɏ����Ă�������ł����H
����ł�500�̕�����0�ȊO�Ȃ�ACCP1CONbits.DC1B�ɂ�0b01������܂��B
0�̏ꍇ��0�ł��B
�i�{���́u&&�v�ł͖����u&�v�j
CCP1CONbits.DC1B��2bit�̊�ł��B
�Ȃ̂ŁA4�Ŋ������]�肪����܂��B
CCP1CONbits.CCP1X=500;
CCP1CONbits.CCP1Y=500;
�Ȃ�A���R�A�����Ƃ�0�ł��B
1bit�̊�(��2��)�����Ȃ����ɂ������������������ƁA�J��オ�������͏����܂��B
�ȒP�Ɍ�����2�Ŋ������]��ł��B
duty�䂪1�Ȃ画��ł��傤�H
CCP1CONbits.CCP1X=1;
CCP1CONbits.CCP1Y=1;
�Ə����āAX�̕���0�ɂȂ锤�Ȃ��ł���ˁH
MABO����̌����ʂ�̏������K�v�ł��B
�܂��A�[���Ȃ̂ŋC�t���Ȃ��\�����傫���ł����ǁB
�c�Ǝv������
> CCP1CONbits.DC1B = 500 && 0b11;
����͑ʖڂł��B���̃T�C�g�ɏ����Ă�������ł����H
����ł�500�̕�����0�ȊO�Ȃ�ACCP1CONbits.DC1B�ɂ�0b01������܂��B
0�̏ꍇ��0�ł��B
�i�{���́u&&�v�ł͖����u&�v�j
�ҋ����b�N 2018/11/14(Wed) 03:37 No.1203 Re: Duty���ς���v���O����
�ҋ����b�N�����
���ȒP�Ɍ�����2�Ŋ������]��ł��B
�Ȃ낤�Ǝv���āA����������A�@2�Ŋ������A�]��̂P����������ׂ�ƁA
2�i���\���ɂȂ�Ƃ���܂����B
�ł��A10�i���ɑΉ�����2�i���̏��8�r�b�g�����o�����߂�
10�i����4�@�Ƃ���n�j�Ƃ����v���O�����́A�A�A
�����s�v�c�Ȋ����ł��B
�I�V���O���t�Ŋm�F�ł����炢���̂ł��傤���ǁA�����̃��x���ł͎����Ă��܂���B
�����A�������Ă݂�ƁA����ɖ��邭�Ȃ��āA����ɈÂ��Ȃ�܂����B
�E10�i����4�@�Ƃ���n�j�Ƃ����v���O����
�@CCPR1L = 500/4;
�E�Q�l�����t�q�k
�@https://arigato-lucky.at.webry.info/200710/article_17.html
��
������A��o�����̂ŁA�ǂ������ł��B
�łȂ�ł����A
�o�v�l�@�\���g�����߂ɁAADRES�Ƃ������W�X�^
������悤�Ȃ̂ł����A
����́A16�e�W�W�ɂ͂���̂ł��傤���H
�����Ƃ��Ă͌�����܂���ł����B
�ǂ�������A�����ĉ������B
���ȒP�Ɍ�����2�Ŋ������]��ł��B
�Ȃ낤�Ǝv���āA����������A�@2�Ŋ������A�]��̂P����������ׂ�ƁA
2�i���\���ɂȂ�Ƃ���܂����B
�ł��A10�i���ɑΉ�����2�i���̏��8�r�b�g�����o�����߂�
10�i����4�@�Ƃ���n�j�Ƃ����v���O�����́A�A�A
�����s�v�c�Ȋ����ł��B
�I�V���O���t�Ŋm�F�ł����炢���̂ł��傤���ǁA�����̃��x���ł͎����Ă��܂���B
�����A�������Ă݂�ƁA����ɖ��邭�Ȃ��āA����ɈÂ��Ȃ�܂����B
�E10�i����4�@�Ƃ���n�j�Ƃ����v���O����
�@CCPR1L = 500/4;
�E�Q�l�����t�q�k
�@https://arigato-lucky.at.webry.info/200710/article_17.html
��
������A��o�����̂ŁA�ǂ������ł��B
�łȂ�ł����A
�o�v�l�@�\���g�����߂ɁAADRES�Ƃ������W�X�^
������悤�Ȃ̂ł����A
����́A16�e�W�W�ɂ͂���̂ł��傤���H
�����Ƃ��Ă͌�����܂���ł����B
�ǂ�������A�����ĉ������B
TR 2018/11/14(Wed) 07:43 Re: Duty����v���O����
10�i���A2�i���A16�i���Ȃǂ͒P�ɐl�����ʂ��邽�߂̂��̂ł��B
�l�Ƃ��Ă͂ǂ�������ł��B
2�i���u�\���v�Ƃ���悤�ɁA�l�ɂƂ��ĈӖ��������ʂ̎d���ł��B
> 10�i����4�@�Ƃ���n�j�Ƃ����v���O�����́A�A�A
10�i���ׂ͗̈ʂ�10�{�A������1/10�ł��B2�i���ׂ̗̈ʂ͓����l��2�{�A������1/2�ł��B
���i���́��ŁA�ʂ��オ��A�ƌ������ł��B
> �������Ă݂�ƁA����ɖ��邭�Ȃ��āA����ɈÂ��Ȃ�܂����B
10�����钆�ŁA��2���ł�����A�قƂ�NJ����Ȃ��ł��傤�ˁB
�m�F����Ȃ烌�W�X�^��ǂݍ��߂Δ���܂���B
> �����Ƃ��Ă͌�����܂���ł����B
���������������܂���B
�l�Ƃ��Ă͂ǂ�������ł��B
2�i���u�\���v�Ƃ���悤�ɁA�l�ɂƂ��ĈӖ��������ʂ̎d���ł��B
> 10�i����4�@�Ƃ���n�j�Ƃ����v���O�����́A�A�A
10�i���ׂ͗̈ʂ�10�{�A������1/10�ł��B2�i���ׂ̗̈ʂ͓����l��2�{�A������1/2�ł��B
���i���́��ŁA�ʂ��オ��A�ƌ������ł��B
> �������Ă݂�ƁA����ɖ��邭�Ȃ��āA����ɈÂ��Ȃ�܂����B
10�����钆�ŁA��2���ł�����A�قƂ�NJ����Ȃ��ł��傤�ˁB
�m�F����Ȃ烌�W�X�^��ǂݍ��߂Δ���܂���B
> �����Ƃ��Ă͌�����܂���ł����B
���������������܂���B
�ҋ����b�N 2018/11/14(Wed) 21:25 No.1205 Re: Duty���ς���v���O����
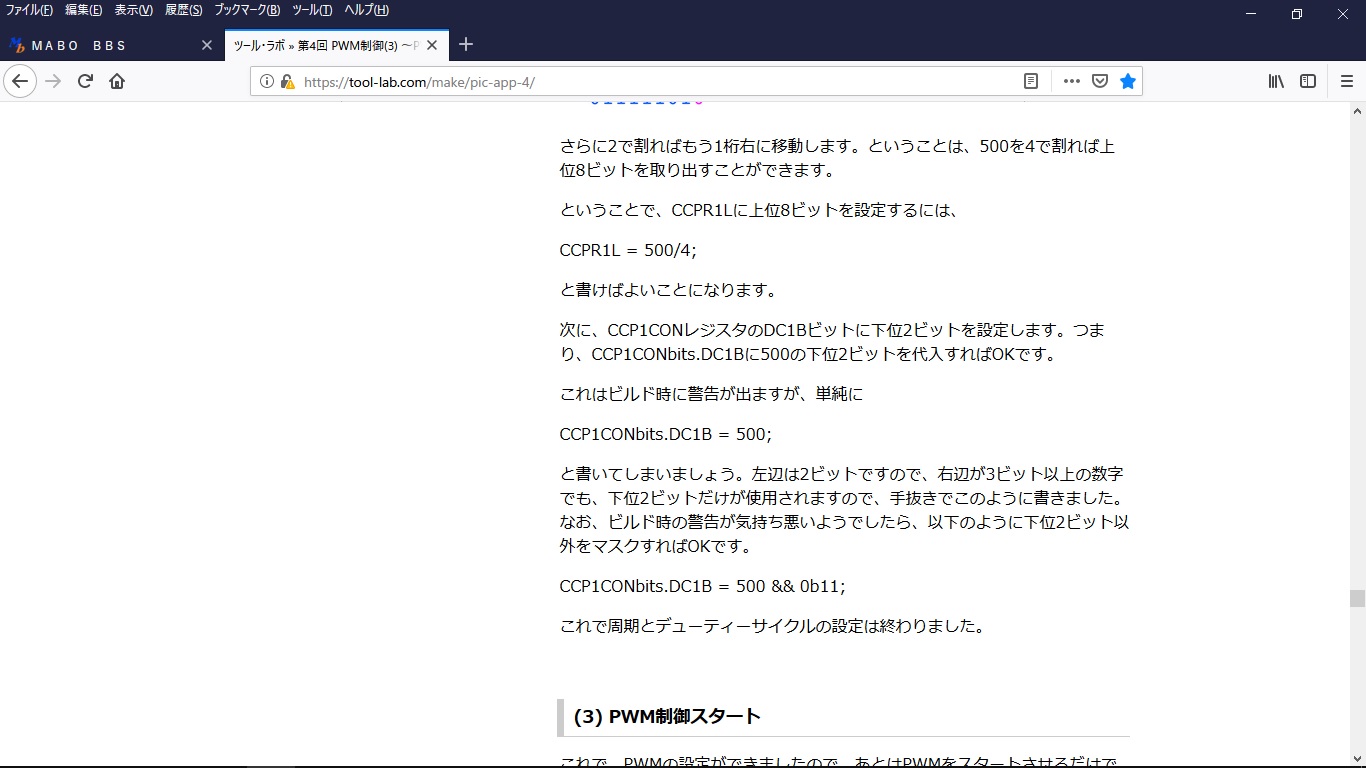 �s�q����C�ҋ����b�N����C�����́B
�s�q����C�ҋ����b�N����C�����́B��CCP1CONbits.DC1B = 500 && 0b11;
�}�X�N�����ł�����C�ҋ����b�N����̂��������悤�ɁC
����ł��ˁB
�g�o�ɏ����Ă���L���́C�Ȃ�̋^�����Ȃ��M���Ă��܂��Ƃ��낪����̂ŁC
�C�����Ȃ��Ƃ��߂ł��ˁB
https://tool-lab.com/make/pic-app-4/
�Q�i�������P�O�i���̕ϊ����悭�G�N�Z�����g���Ă��܂��B
�����C���܂ł́C�����Ȑ��ł����̂ŁC���Ȃ��ł��܂������C
�T�P�Q���Ɣ����t���̊��ł͂��߂ł����B
���c�d�b�Q�a�h�m�i�m�C���j
�Ƃ������ł����C
�@�@�@�@�|�T�P�R���m���T�P�Q
�@�@�@�@�@�P���������P�P
�ł����B����������ł���̂ŁC������Ɠ��ɂ��Ȃ�܂��B
mabo 2018/11/15(Thu) 00:08 No.1206 Re: Duty����v���O����
ADRES���W�X�^�[�ł����A
�ŏ��A�`�c�q�d�r�Ō������Ă����������̂ŁA
���ɁuA/D Result register�v�ł��������܂������A
�`�c�q�d�r�̕\�L�͌�������܂���ł����B
�Ƃ����̂��A�l�o�k�`�a�@�h�c�d�ɂ`�c�q�d�r�Ə������ނ�
�G���[���N�������̂ŁA
16�e88�̏ꍇ�́A���W�X�^�[�̖��̂��Ⴄ�Ǝv�����̂ŁA
�T���n�߂܂����B
ADRESH�A��ADRESL�̕\�L�͂���̂ł����A
�`�c�q�d�r�ɑΉ�����16�e88�Ń��W�X�^�[��������܂���B
mabo����
2�i���ϊ��ł����A�����͉��L�T�C�g�𗘗p���Ă��܂��B
https://hogehoge.tk/tool/number.html
�ŏ��A�`�c�q�d�r�Ō������Ă����������̂ŁA
���ɁuA/D Result register�v�ł��������܂������A
�`�c�q�d�r�̕\�L�͌�������܂���ł����B
�Ƃ����̂��A�l�o�k�`�a�@�h�c�d�ɂ`�c�q�d�r�Ə������ނ�
�G���[���N�������̂ŁA
16�e88�̏ꍇ�́A���W�X�^�[�̖��̂��Ⴄ�Ǝv�����̂ŁA
�T���n�߂܂����B
ADRESH�A��ADRESL�̕\�L�͂���̂ł����A
�`�c�q�d�r�ɑΉ�����16�e88�Ń��W�X�^�[��������܂���B
mabo����
2�i���ϊ��ł����A�����͉��L�T�C�g�𗘗p���Ă��܂��B
https://hogehoge.tk/tool/number.html
TR 2018/11/15(Thu) 07:19 Re: Duty����v���O����
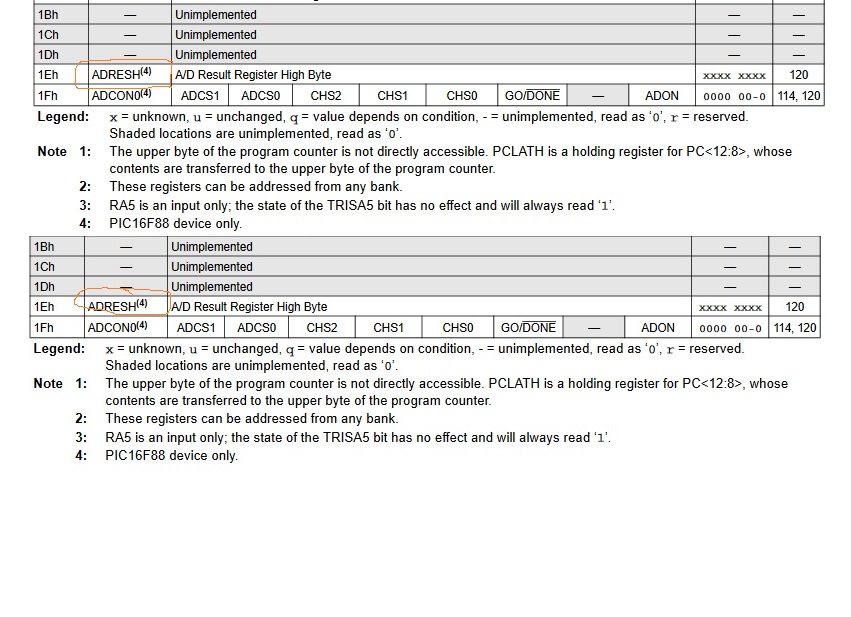 �s�q����C�ҋ����b�N���͂悤�������܂��B
�s�q����C�ҋ����b�N���͂悤�������܂��B�s�q����C�Q�i���ϊ��̂g�o�Љ�肪�Ƃ��������܂��B
��ADRES���W�X�^�[�ł����A
�f�[�^�V�[�g���Ă݂�ƁC�`�^�c�ϊ��̌��ʂ̊i�[�Ŏg���Ă�悤�ł��ˁB
�@ADRESH
�@ADRESL
�̋L�q���f�[�^���Ƃ̉��̕��ɂ���܂����B
A/D�ϊ��̌��ʂ̊i�[�Ɏg���݂����ł��ˁB
http://physics.cocolog-nifty.com/weblog/2012/07/post-2147.html
�Ƀv���O�����łĂ܂��B
�@�@
mabo 2018/11/15(Thu) 09:13 No.1208 Re: Duty����v���O����
mabo����L���������܂�
��͂�AF88�ɂ�ADRES���W�X�^�����������悤�ł��ˁB
�Љ��̊Ǘ��l�́A�Ώ��Ƃ��āA
unsigned int adconv()�@��������Ă��܂��B
�ł��A�v���O������
return (ADRESH<<8) + ADRESL
���̂悤�ɁA�{�Ƃ���10�o�C�g�����o����̂́A�����܂����I�H
16F88�͖ʓ|�������B
�����ƊȒP��PIC���~�����ł�
��͂�AF88�ɂ�ADRES���W�X�^�����������悤�ł��ˁB
�Љ��̊Ǘ��l�́A�Ώ��Ƃ��āA
unsigned int adconv()�@��������Ă��܂��B
�ł��A�v���O������
return (ADRESH<<8) + ADRESL
���̂悤�ɁA�{�Ƃ���10�o�C�g�����o����̂́A�����܂����I�H
16F88�͖ʓ|�������B
�����ƊȒP��PIC���~�����ł�
TR 2018/11/15(Thu) 13:42 No.1209 Re: Duty����v���O����
mabo����A�����́B
���Љ���������A�ł̂k�`�J�������܂����B
�h�c�w�̍��o�[�W�����ɕύX���A
�u���v�p�ɂ�����A���삵�܂����B
�ŁA�ȉ��̃v���O�����ł����A
���܂łƁA���ƈႤ�����������Ă��܂��B
�e�������ł��B
�o�p���ɁA���܂ł́A����������e�������Ă��܂������A
�̏ꍇ�́A�P�Ɂ{�{�̑����Z�����邾���A
�܂�A���Ԃ��҂������̂��ƂɂȂ�̂ł��傤���H
http://physics.cocolog-nifty.com/weblog/2012/07/post-2147.html
RB3 = 1;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
RB3 = 0;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
}
���Љ���������A�ł̂k�`�J�������܂����B
�h�c�w�̍��o�[�W�����ɕύX���A
�u���v�p�ɂ�����A���삵�܂����B
�ŁA�ȉ��̃v���O�����ł����A
���܂łƁA���ƈႤ�����������Ă��܂��B
�e�������ł��B
�o�p���ɁA���܂ł́A����������e�������Ă��܂������A
�̏ꍇ�́A�P�Ɂ{�{�̑����Z�����邾���A
�܂�A���Ԃ��҂������̂��ƂɂȂ�̂ł��傤���H
http://physics.cocolog-nifty.com/weblog/2012/07/post-2147.html
RB3 = 1;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
RB3 = 0;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
}
TR 2018/11/15(Thu) 22:28 Re: Duty����v���O����
�s�q����C�����́B
���̏ꍇ�́A�P�Ɂ{�{�̑����Z�����邾���A
���܂�A���Ԃ��҂������̂��ƂɂȂ�̂ł��傤���H
�������Ǝv���܂��B
�Ӗ��I�ɂ́C
�@__delay_ms();
�Ɠ����悤�ȏ��������邱�ƂɂȂ�Ǝv���܂����C
�m���C__delay_ms()�@�ł́C���ʂ̒��ɕϐ��͓�����Ȃ������C�悤�ȋC�����܂��B
����ŁC����ȕ��ɂ����̂��ȂƎv���܂��B
�ϐ����������@__delay_ms()�@�g�������̂ł��傤���ǁB
���̏ꍇ�́A�P�Ɂ{�{�̑����Z�����邾���A
���܂�A���Ԃ��҂������̂��ƂɂȂ�̂ł��傤���H
�������Ǝv���܂��B
�Ӗ��I�ɂ́C
�@__delay_ms();
�Ɠ����悤�ȏ��������邱�ƂɂȂ�Ǝv���܂����C
�m���C__delay_ms()�@�ł́C���ʂ̒��ɕϐ��͓�����Ȃ������C�悤�ȋC�����܂��B
����ŁC����ȕ��ɂ����̂��ȂƎv���܂��B
�ϐ����������@__delay_ms()�@�g�������̂ł��傤���ǁB
mabo 2018/11/15(Thu) 23:39 No.1211 Re: Duty����v���O����
> F88�ɂ�ADRES���W�X�^�����������悤�ł��ˁB
���H�܂��A�����Ƃ������܂����ǁA����Ƃ������܂��B
ADRESH��ADRESL��ADRES�ł��B
10�r�b�g���\��ADC�Ȃ̂ŁA�K�R�I��2�ɕ�����܂��B
> 16F88�͖ʓ|�������B
���₢��A16F88�͎g���₷���Ő����c���Ă���}�C�R���ł���B
�E�B���h�E�Y�Ō�����XP�݂����Ȃ��̂��Ȃ��B
�ŋ߂̂��̂͊o���邱�Ƃ�2�`3�{���x����܂��B16F19155�̃f�[�^�V�[�g�Ȃ��735�y�[�W�܂ł���܂��B
���ɗ���̂́A����ȊO�ɃG���b�^�̃f�[�^�V�[�g����������A�f�[�^�V�[�g�̃o�[�W�����ŏd�v�Ȏ�����
�ڂ��Ă��Ȃ������肷�邱�Ƃł��B
RB3 = 1;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
RB3 = 0;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
}
�͂��܂�Q�l�ɂ��Ȃ������ǂ��ł��B
�������Ă݂Ȃ��Ƃǂ��Ȃ邩����Ȃ��R�[�h�ł��B
�{�l�������Ă��Ȃ������̂ł�?
��肽�������̂�
while (1){
tmp = adconv();
RB3 = 1;
__delay_ms(tmp);
RB3 = 0;
__delay_ms(tmp);
}
�̂悤�Ȏ����Ǝv���܂����ǁA
(__delay_ms()�̈����ɕϐ������Ă͑ʖڂł����ǁj
for(i = 0; i<tmp; i++){}
�̕�����
volatile unsigned int i;
��i��錾���Ă��Ȃ��Əȗ������ꍇ������܂��B
�����e��{}�Ƌ���ł��B
�����āA���̎���
;
�͒P�Ƃł��Bfor���Ƃ͊W����܂���B
�����āA
__delay_ms(2);
���P�Ƃł��B
�܂�A3�̉������Ȃ����߂���ׂĂ��܂��B
�ʏ��
RB3 = 1;
for(i = 0; i<tmp; i++)__delay_ms(1);
RB3 = 0;
for(i = 0; i<tmp; i++)__delay_ms(1);
�ł��B
���H�܂��A�����Ƃ������܂����ǁA����Ƃ������܂��B
ADRESH��ADRESL��ADRES�ł��B
10�r�b�g���\��ADC�Ȃ̂ŁA�K�R�I��2�ɕ�����܂��B
> 16F88�͖ʓ|�������B
���₢��A16F88�͎g���₷���Ő����c���Ă���}�C�R���ł���B
�E�B���h�E�Y�Ō�����XP�݂����Ȃ��̂��Ȃ��B
�ŋ߂̂��̂͊o���邱�Ƃ�2�`3�{���x����܂��B16F19155�̃f�[�^�V�[�g�Ȃ��735�y�[�W�܂ł���܂��B
���ɗ���̂́A����ȊO�ɃG���b�^�̃f�[�^�V�[�g����������A�f�[�^�V�[�g�̃o�[�W�����ŏd�v�Ȏ�����
�ڂ��Ă��Ȃ������肷�邱�Ƃł��B
RB3 = 1;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
RB3 = 0;
for(i = 0; i<tmp; i++){};
__delay_ms(2);
}
�͂��܂�Q�l�ɂ��Ȃ������ǂ��ł��B
�������Ă݂Ȃ��Ƃǂ��Ȃ邩����Ȃ��R�[�h�ł��B
�{�l�������Ă��Ȃ������̂ł�?
��肽�������̂�
while (1){
tmp = adconv();
RB3 = 1;
__delay_ms(tmp);
RB3 = 0;
__delay_ms(tmp);
}
�̂悤�Ȏ����Ǝv���܂����ǁA
(__delay_ms()�̈����ɕϐ������Ă͑ʖڂł����ǁj
for(i = 0; i<tmp; i++){}
�̕�����
volatile unsigned int i;
��i��錾���Ă��Ȃ��Əȗ������ꍇ������܂��B
�����e��{}�Ƌ���ł��B
�����āA���̎���
;
�͒P�Ƃł��Bfor���Ƃ͊W����܂���B
�����āA
__delay_ms(2);
���P�Ƃł��B
�܂�A3�̉������Ȃ����߂���ׂĂ��܂��B
�ʏ��
RB3 = 1;
for(i = 0; i<tmp; i++)__delay_ms(1);
RB3 = 0;
for(i = 0; i<tmp; i++)__delay_ms(1);
�ł��B
�ҋ����b�N 2018/11/17(Sat) 00:22 No.1212 Re: Duty���ς���v���O����
���݂ɁA���̃T�C�g�̃v���O������Arduino�ł���
void setup() {
pinMode(13,OUTPUT);
}
void loop() {
word tmp=analogRead(A0)/4;
digitalWrite(13,HIGH);
delay(tmp);
digitalWrite(13,LOW);
delay(tmp);
}
�����ł��B�f�[�^�V�[�g������K�v�͂���܂���B
���S�҂̓��t�@�����X�̃y�[�W�͌���K�v����ł��傤���ǁB
��H��LED��13�ԃs���ɕt���Ă���̂ŁA
�{�����[���̔z������5V�AA0�s���AGND�ƌq���Β����ɏ�������Ŏ����܂��B
���������A���̃T�C�g�̐l���A����Arduino�ɈƑւ������H�̂����m��܂���B
http://physics.cocolog-nifty.com/weblog/2018/06/arduino14-392d.html
�}���`�{�[�g�������Ă����悤�ł��B
���łɁA�{�����[���ɍ��킹�Ė��邳��ς���X�P�b�`���ƍX�ɊȒP�ł��B
void setup() {
}
void loop() {
analogWrite(3,analogRead(A0)/4);
delay(10);
}
3�ԃs��-LED�AA0�s��-�{�����[���ł��B
void setup() {
pinMode(13,OUTPUT);
}
void loop() {
word tmp=analogRead(A0)/4;
digitalWrite(13,HIGH);
delay(tmp);
digitalWrite(13,LOW);
delay(tmp);
}
�����ł��B�f�[�^�V�[�g������K�v�͂���܂���B
���S�҂̓��t�@�����X�̃y�[�W�͌���K�v����ł��傤���ǁB
��H��LED��13�ԃs���ɕt���Ă���̂ŁA
�{�����[���̔z������5V�AA0�s���AGND�ƌq���Β����ɏ�������Ŏ����܂��B
���������A���̃T�C�g�̐l���A����Arduino�ɈƑւ������H�̂����m��܂���B
http://physics.cocolog-nifty.com/weblog/2018/06/arduino14-392d.html
�}���`�{�[�g�������Ă����悤�ł��B
���łɁA�{�����[���ɍ��킹�Ė��邳��ς���X�P�b�`���ƍX�ɊȒP�ł��B
void setup() {
}
void loop() {
analogWrite(3,analogRead(A0)/4);
delay(10);
}
3�ԃs��-LED�AA0�s��-�{�����[���ł��B
�ҋ����b�N 2018/11/17(Sat) 00:43 No.1213 Re: Duty���ς���v���O����
�s�q����C�ҋ����b�N����C����ɂ��́B
�ҋ����b�N����C���낢�날�肪�Ƃ��������܂��B
����������Ƃ����CArduino������܂������C
PIC�ɔ�ׂ�Ɛe�؉߂��銴���ł��ˁB
���ꂩ��C
�@analogRead(A0)/4
�ł����C����ɁC�S�Ŋ���̂��C����Ƃ���ʂ̂S�r�b�g��
�Ƃ肾���̂ł��傤���B
���̕ӂ̎d�l��������ƕ�����Ȃ����ȂƎv���܂��B
�ҋ����b�N����C���낢�날�肪�Ƃ��������܂��B
����������Ƃ����CArduino������܂������C
PIC�ɔ�ׂ�Ɛe�؉߂��銴���ł��ˁB
���ꂩ��C
�@analogRead(A0)/4
�ł����C����ɁC�S�Ŋ���̂��C����Ƃ���ʂ̂S�r�b�g��
�Ƃ肾���̂ł��傤���B
���̕ӂ̎d�l��������ƕ�����Ȃ����ȂƎv���܂��B
mabo 2018/11/17(Sat) 12:28 No.1214 Re: Duty����v���O����
> ����ɁC�S�Ŋ���̂��C����Ƃ���ʂ̂S�r�b�g��
> �Ƃ肾���̂ł��傤���B
�P��4�Ŋ����Ă��܂��B����10�r�b�g�Ȃ̂ŁA���8�r�b�g�����o���Ă��܂��B
��analogWrite��8�r�b�g�w��AanalogRead��10�r�b�g�Ǐo��
> �Ƃ肾���̂ł��傤���B
�P��4�Ŋ����Ă��܂��B����10�r�b�g�Ȃ̂ŁA���8�r�b�g�����o���Ă��܂��B
��analogWrite��8�r�b�g�w��AanalogRead��10�r�b�g�Ǐo��
�ҋ����b�N 2018/11/17(Sat) 12:42 No.1215 Re: Duty���ς���v���O����
�݂Ȃ����́B
�`�c�q�d�r�ł����A
�悤�₭������܂����B
��͂背�W�X�^�Ƃ��Ă͑��݂��Ă��Ȃ������ł��B
�ł��A
12�e1822�ɂ́A�`�c�q�d�r�Ƃ���A10�r�b�g�Ƃ��Ď�舵�����Ƃ��o���邻���ł��B
�o�h�b12�e1822�ɂ͂���@�\�ł����A88��627�`�ɂ͂Ȃ������ł��B
�o�h�b12�e1822���{��o�[�W�����̃f�[�^�V�[�g149�ŏ��4�s�ڂ�
�`�c�q�d�r��9�F2���ƕ\�L����Ă��܂��B
���̓Ɠ��̕\�L���@���炷��ƁA
9����2�r�b�g�܂ł��ЂƂ�����ɂ���A�A�A�������I�����ł����B
���ꂩ��Amabo����̂��Љ�������v���O�����ł����A
�ȉ��̂悤�ɕς��܂����B
���삵�Ă��܂��B
�C�ɂȂ����_�́A
char str[7];�@�@���@�z��A�v���O�����̉����ɂ��Ȃ��̂ŕs�v�B
RB3 = 1;
for(i = 0; i��tmp; i++){};
���2�s�ł��B�q�a3���o�p�̒��ɓ���܂���
��A�ҋ����b�N����̌�����悤�Ɂ@�G�@���s�v�ł��ˁB
�b�͖߂�܂����A���̊Ǘ��l�����88���g���Ă��܂����A
12�e1822�ɂ���A�d���ǂݎ��̉��L�v���O����
�@�@�L
return (ADRESH<<8) + ADRESL;
��L��
return�iADRES�j�G�@�Əo����͂��ł��B
�S�闝�R
���ȏ��ł�
return(����)�ƂȂ��Ă��邩��ł��B
�{���ɏ�L�̋L�ڕ��@�ŏ��8�r�b�g�Ɖ���2�r�b�g��������ƕ���ł���̂��낤���ƁH�H
�ύX��
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 4000000
//�v���g�^�C�v�錾
unsigned int adconv();
//�ϐ��錾
unsigned int tmp;
unsigned int i;
void main()
{
OSCCON = 0b0110000; // ����OSC 4MHz
// AD�R���o�[�^�ݒ�
ADCON0 = 0b01000001; // RA0��AD�R���o�[�^�s���ɂ��AAD�R���o�[�^�@�\��Ebable��
ADCON1 = 0b10000000; // ���ʐ��l�͉E�A��d����VDD
ANSEL = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s��
TRISA = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s���i���́j
TRISB = 0x00; // ���ׂďo��
PORTA = 0x00;
PORTB = 0x00;
while (1)
{
tmp = adconv();
for(i = 0; i<tmp; i++){RB3=1;}
__delay_ms(2);
for(i = 0; i<tmp; i++){RB3=0;};
__delay_ms(2);
}
}
unsigned int adconv()
{
__delay_us(20); //�A�N�B�W�������ԁ@20us
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (ADRESH<<8)+ ADRESL;
}
�`�c�q�d�r�ł����A
�悤�₭������܂����B
��͂背�W�X�^�Ƃ��Ă͑��݂��Ă��Ȃ������ł��B
�ł��A
12�e1822�ɂ́A�`�c�q�d�r�Ƃ���A10�r�b�g�Ƃ��Ď�舵�����Ƃ��o���邻���ł��B
�o�h�b12�e1822�ɂ͂���@�\�ł����A88��627�`�ɂ͂Ȃ������ł��B
�o�h�b12�e1822���{��o�[�W�����̃f�[�^�V�[�g149�ŏ��4�s�ڂ�
�`�c�q�d�r��9�F2���ƕ\�L����Ă��܂��B
���̓Ɠ��̕\�L���@���炷��ƁA
9����2�r�b�g�܂ł��ЂƂ�����ɂ���A�A�A�������I�����ł����B
���ꂩ��Amabo����̂��Љ�������v���O�����ł����A
�ȉ��̂悤�ɕς��܂����B
���삵�Ă��܂��B
�C�ɂȂ����_�́A
char str[7];�@�@���@�z��A�v���O�����̉����ɂ��Ȃ��̂ŕs�v�B
RB3 = 1;
for(i = 0; i��tmp; i++){};
���2�s�ł��B�q�a3���o�p�̒��ɓ���܂���
��A�ҋ����b�N����̌�����悤�Ɂ@�G�@���s�v�ł��ˁB
�b�͖߂�܂����A���̊Ǘ��l�����88���g���Ă��܂����A
12�e1822�ɂ���A�d���ǂݎ��̉��L�v���O����
�@�@�L
return (ADRESH<<8) + ADRESL;
��L��
return�iADRES�j�G�@�Əo����͂��ł��B
�S�闝�R
���ȏ��ł�
return(����)�ƂȂ��Ă��邩��ł��B
�{���ɏ�L�̋L�ڕ��@�ŏ��8�r�b�g�Ɖ���2�r�b�g��������ƕ���ł���̂��낤���ƁH�H
�ύX��
// CONFIG1
#pragma config FOSC = INTOSCIO // Oscillator Selection bits (INTRC oscillator; port I/O function on both RA6/OSC2/CLKO pin and RA7/OSC1/CLKI pin)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // RA5/MCLR/VPP Pin Function Select bit (RA5/MCLR/VPP pin function is MCLR)
#pragma config BOREN = OFF // Brown-out Reset Enable bit (BOR disabled)
#pragma config LVP = OFF // Low-Voltage Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EE Memory Code Protection bit (Code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off)
#pragma config CCPMX = RB3 // CCP1 Pin Selection bit (CCP1 function on RB3)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
// CONFIG2
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor enabled)
#pragma config IESO = OFF // Internal External Switchover bit (Internal External Switchover mode enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 4000000
//�v���g�^�C�v�錾
unsigned int adconv();
//�ϐ��錾
unsigned int tmp;
unsigned int i;
void main()
{
OSCCON = 0b0110000; // ����OSC 4MHz
// AD�R���o�[�^�ݒ�
ADCON0 = 0b01000001; // RA0��AD�R���o�[�^�s���ɂ��AAD�R���o�[�^�@�\��Ebable��
ADCON1 = 0b10000000; // ���ʐ��l�͉E�A��d����VDD
ANSEL = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s��
TRISA = 0b00000001; // RA0(AN0)�̓A�i���O�œǂݎ��s���i���́j
TRISB = 0x00; // ���ׂďo��
PORTA = 0x00;
PORTB = 0x00;
while (1)
{
tmp = adconv();
for(i = 0; i<tmp; i++){RB3=1;}
__delay_ms(2);
for(i = 0; i<tmp; i++){RB3=0;};
__delay_ms(2);
}
}
unsigned int adconv()
{
__delay_us(20); //�A�N�B�W�������ԁ@20us
ADCON0bits.GO_DONE= 1; //AD�ϊ��J�n
while(ADCON0bits.GO_DONE); //�ϊ������҂�
return (ADRESH<<8)+ ADRESL;
}
TR 2018/11/17(Sat) 19:18 Re: Duty����v���O����
10�r�b�g��ADRES���uADRES�v�Œʂ��邩�ǂ����̓R���p�C���̎d�l�ł��B
�n�[�h�Ƃ͊W����܂���B
�����ۂɂ̓n�[�h�ɂ͉��̖��O������܂���BADRESL��PORTA���P�ɂ��̃A�h���X�ɂ��郌�W�X�^�̐�����t�������O�ł��B
���̖��O�ŁA���̃A�h���X�̓��e�𐧌�ł���悤�ɃR���p�C�����֘A�t���Ă��܂��B
�Ȃ̂ŁA�f�[�^�V�[�g�ɍڂ��Ă��郌�W�X�^�������̃R���p�C���Œʂ��邩���������ۂ͔���܂���B
���̃R���p�C�����ʂ���d�l�ŁA���Ă����Ύg�������ł����A
�����łȂ���Ύ����ŏ������鎖�ɂȂ�܂��B
�ܘ_�A�R���p�C���̎d�l�ł�����A�R���p�C���o�[�W�����ł��ς�邩������܂���B
> �`�c�q�d�r��9�F2��
����́AADRES�̑�9�r�b�g�`��2�r�b�g�܂ŁA�ƌ������ł��B
�t�Ɍ����AADRES�̑�0�A��1�r�b�g�͕ʂ̏��ɂ���A�ƌ������ł��B
���ʁA8�r�b�g�����g��Ȃ��ꍇ�͍��l�߁i��HIGH�����ǂ܂Ȃ��j�A10�r�b�g�g���ꍇ�͉E�l�߂ɂ��܂��B
> for(i = 0; i<tmp; i++){RB3=1;}
> __delay_ms(2);
> for(i = 0; i<tmp; i++){RB3=0;};
> __delay_ms(2);
> }
���ꎩ�̂͊ԈႢ�ł͖����ł��B�ܘ_�A�����v���O�����ł��ԈႢ�ł͂���܂���B
�����A�v���Ă��铮����L�q���Ă���̂��ǂ����H�ł��B
���ʁA���̎��ɂ�肽�����Ƃ�
RB3��2*tmp[ms]��HIGH�A��RB3��2*tmp[ms]��LOW�ɂ���
�Ƃ����l���ō��܂���ˁH
���Ȃ��������邩�Ƃ����ƁA__delay_ms(tmp*2);��__delay_ms���ł͕ϐ��������ɏo���Ȃ��d�l������ł��B
�ł�����̂��ƁA
�ŏ���for���ł�tmp��RB3=1�����s����܂��B�i�����for���I���j
����__delay_ms(2);��1��s���܂��B
����for����tmp��RB3=1�����s����܂��B�i�����for���I���j
(���Y��ł��傤���ǁu;�v���P��s����H)
�ŁA����__delay_ms(2);��1��s���܂��B
�܂�A���Ԃ̑�����__delay_ms(2);�͊ւ���Ă��܂���B
{}����RB3=�������Ă���̂ŁA�R���p�C���ɏȗ�����鎖�͖����ł��傤�B
> ���ȏ��ł�
> return(����)�ƂȂ��Ă��邩��ł��B
> �{���ɏ�L�̋L�ڕ��@�ŏ��8�r�b�g�Ɖ���2�r�b�g��������ƕ���ł���̂��낤���ƁH�H
return���ɂ�()�͗v��܂���B�܂�A���Ŏg��main�u()�v�̈Ӗ��Ƃ͈Ⴂ�܂��B������͈���������ꏊ�A�Ƃ�������������܂��B
return���ɕt���Ă���̂́A�P���Ɍv�Z���Ɏg��()�̈Ӗ��ł��B�K�v�ȏ�ɕt���Ă��G���[�ł͂���܂���B
return (1+2+3)/4;
�Ə����Ă��A6/4���u1�v���Ԃ�܂��B
�uunsigned int�v adconv()
�Ɩ߂�l�������Ȃ�16�r�b�g�����Ȃ̂ŁA
return (ADRESH<<8)+ ADRESL;
�ŁA������16�r�b�g�̐������Ԃ�܂��B
���ܘ_�A�ϊ����ʂ��E�l�߂����ꍇ�ł��B
��́A���̎��������ꂪ���邾���̑傫�����K�v�ł��B
��������Ȃ��傫���Ȃ�A���ӂ�o�����͏����܂��B
�n�[�h�Ƃ͊W����܂���B
�����ۂɂ̓n�[�h�ɂ͉��̖��O������܂���BADRESL��PORTA���P�ɂ��̃A�h���X�ɂ��郌�W�X�^�̐�����t�������O�ł��B
���̖��O�ŁA���̃A�h���X�̓��e�𐧌�ł���悤�ɃR���p�C�����֘A�t���Ă��܂��B
�Ȃ̂ŁA�f�[�^�V�[�g�ɍڂ��Ă��郌�W�X�^�������̃R���p�C���Œʂ��邩���������ۂ͔���܂���B
���̃R���p�C�����ʂ���d�l�ŁA���Ă����Ύg�������ł����A
�����łȂ���Ύ����ŏ������鎖�ɂȂ�܂��B
�ܘ_�A�R���p�C���̎d�l�ł�����A�R���p�C���o�[�W�����ł��ς�邩������܂���B
> �`�c�q�d�r��9�F2��
����́AADRES�̑�9�r�b�g�`��2�r�b�g�܂ŁA�ƌ������ł��B
�t�Ɍ����AADRES�̑�0�A��1�r�b�g�͕ʂ̏��ɂ���A�ƌ������ł��B
���ʁA8�r�b�g�����g��Ȃ��ꍇ�͍��l�߁i��HIGH�����ǂ܂Ȃ��j�A10�r�b�g�g���ꍇ�͉E�l�߂ɂ��܂��B
> for(i = 0; i<tmp; i++){RB3=1;}
> __delay_ms(2);
> for(i = 0; i<tmp; i++){RB3=0;};
> __delay_ms(2);
> }
���ꎩ�̂͊ԈႢ�ł͖����ł��B�ܘ_�A�����v���O�����ł��ԈႢ�ł͂���܂���B
�����A�v���Ă��铮����L�q���Ă���̂��ǂ����H�ł��B
���ʁA���̎��ɂ�肽�����Ƃ�
RB3��2*tmp[ms]��HIGH�A��RB3��2*tmp[ms]��LOW�ɂ���
�Ƃ����l���ō��܂���ˁH
���Ȃ��������邩�Ƃ����ƁA__delay_ms(tmp*2);��__delay_ms���ł͕ϐ��������ɏo���Ȃ��d�l������ł��B
�ł�����̂��ƁA
�ŏ���for���ł�tmp��RB3=1�����s����܂��B�i�����for���I���j
����__delay_ms(2);��1��s���܂��B
����for����tmp��RB3=1�����s����܂��B�i�����for���I���j
(���Y��ł��傤���ǁu;�v���P��s����H)
�ŁA����__delay_ms(2);��1��s���܂��B
�܂�A���Ԃ̑�����__delay_ms(2);�͊ւ���Ă��܂���B
{}����RB3=�������Ă���̂ŁA�R���p�C���ɏȗ�����鎖�͖����ł��傤�B
> ���ȏ��ł�
> return(����)�ƂȂ��Ă��邩��ł��B
> �{���ɏ�L�̋L�ڕ��@�ŏ��8�r�b�g�Ɖ���2�r�b�g��������ƕ���ł���̂��낤���ƁH�H
return���ɂ�()�͗v��܂���B�܂�A���Ŏg��main�u()�v�̈Ӗ��Ƃ͈Ⴂ�܂��B������͈���������ꏊ�A�Ƃ�������������܂��B
return���ɕt���Ă���̂́A�P���Ɍv�Z���Ɏg��()�̈Ӗ��ł��B�K�v�ȏ�ɕt���Ă��G���[�ł͂���܂���B
return (1+2+3)/4;
�Ə����Ă��A6/4���u1�v���Ԃ�܂��B
�uunsigned int�v adconv()
�Ɩ߂�l�������Ȃ�16�r�b�g�����Ȃ̂ŁA
return (ADRESH<<8)+ ADRESL;
�ŁA������16�r�b�g�̐������Ԃ�܂��B
���ܘ_�A�ϊ����ʂ��E�l�߂����ꍇ�ł��B
��́A���̎��������ꂪ���邾���̑傫�����K�v�ł��B
��������Ȃ��傫���Ȃ�A���ӂ�o�����͏����܂��B
�ҋ����b�N 2018/11/17(Sat) 22:54 No.1217 �o�h�b�������ݎ���d��
 �c�[�����{����̃R���t�B�O�̋L�������Ă�������A
�c�[�����{����̃R���t�B�O�̋L�������Ă�������A�o�h�b�������ݓd���̋L�����������āA
����������Ă݂܂����B
�������݂�����
16�e88�łk�`�J���ł��܂����B(*^^*)
�ҋ����b�N����
��No.1181�̓Y�t�摜��F88�̂��̂ł�F627A�̕��ł��Ȃ��ł���ˁH
�Ⴄ�f�o�C�X�̃f�[�^�V�[�g�͈Ӗ�������܂���B
�����ł��B
�����悤�Ȃ��̂��낤�Ǝv���āA����Ă��܂��܂����B
16�e88�̃f�[�^�V�[�g�̓��{�ꂪ����悢�̂ł����B
�O�[�O���̖|���
����ƁA�o�h�b3�̒[�q�ɑΉ�����16�e88�̃s���������܂��āA
�\��̎���d������肭�����܂����B
�ʐ^�������������Ȃ��āA���͂��ɂȂ��Ă��܂��܂����B
�C�����炯�ōς݂܂���B
TR 2018/11/04(Sun) 21:05 Re: �o�h�b�������ݎ���d��
 MPLAB �����o�h�b3�ł����A
MPLAB �����o�h�b3�ł����A�ȑO�����Ă��܂������Ǝv���Ă��܂����B
�ł��̂Ă��ɂƂ��Ă����܂����̂ŁA
�����ɂƎv���āA���색�C�^�[�d���ŏ�������ł݂܂�����A
�������܂����B
�ǂ����AMPLAB �����o�h�b3�̕��́A�d�����ア��ł����ˁ`�B
TR 2018/11/05(Mon) 07:01 Re: �o�h�b�������ݎ���d��
�s�q����C�ҋ����b�N����C�����́B
������Əo�Ԃ��Ȃ������̂ŁC�Ђ�����q�n�l���Ă܂����B
���ǂ����AMPLAB �����o�h�b3�̕��́A�d�����ア��ł����ˁ`�B
��������ȋC�����܂��B
�������ݎ��s����̂́C�o�h�b�R�̓d���W�̐ݒ��Y�ꂽ��C
�t�r�a�|�[�g����̓d������������Ȃ�������̂悤�ȋC�����܂��B
�ȑO�C�d���W�̉��ǂ̋L�����݂��悤�ȋC�����Ă܂����C
�Y���̂g�o�T���܂���ł����B
������Əo�Ԃ��Ȃ������̂ŁC�Ђ�����q�n�l���Ă܂����B
���ǂ����AMPLAB �����o�h�b3�̕��́A�d�����ア��ł����ˁ`�B
��������ȋC�����܂��B
�������ݎ��s����̂́C�o�h�b�R�̓d���W�̐ݒ��Y�ꂽ��C
�t�r�a�|�[�g����̓d������������Ȃ�������̂悤�ȋC�����܂��B
�ȑO�C�d���W�̉��ǂ̋L�����݂��悤�ȋC�����Ă܂����C
�Y���̂g�o�T���܂���ł����B
mabo 2018/11/06(Tue) 22:23 No.1192 Re: �o�h�b�������ݎ���d��
�v�`���o
����悤�Șb�Ȃ̂ł��B
�ҋ����b�N����Ƃ̂�����ʂ��āA
���̎����́A��͂�Aarduino�ɂ͋y�Ȃ��Ƃ����̂��ǂ�������܂����B
�\��̃v�`���o�ł����A�Z���̐��E�Ŏg����P��Ȃ�ł����A���܂�C�ɂ��Ȃ��ʼn������B
�b����ƌ����Ă��F�X����ȁ`�Ƃ��������ł��B
�łȂ�ł����A
�����I�ɂ́A�@�o�h�b�̃v���O���~���O�ňȉ��̎���������܂����B
����́A�������Ȃ��ő�����ł��B
while(RA5==1){}�@���̓���o�p�����ɂ���A�������Ȃ��Ƃ����Ӗ��ɂȂ��āA
RB=1�@�̓���𑱂��邱�ƂɂȂ�B
�܂�A�o�h�b�ɓd�������������Ƃ�����ԕ\�����k�d�c���_�����邱�Ƃɂ���Ĕc���ł���Ƃ������ł��B
// LED�̃s����1�ɂ��āALED��_������
RB7=1;
//�r�v���n�m�ɂȂ�Ȃ�����̂܂�
while(RA5==1){}
���ꂩ��Amabo������A�o�h�b�R�̎���d��������Ă݂ĉ������B
���肵�ď������݂��o����l�ɂȂ�܂��B
�NjL
�Ԍ��v���O�������ꕔ�C��
�C�����e
�o�h�b�ɒʓd�����m�点�p�ɂq�`�S��_�������A
�l�n�c�d������q�`�S������������B
// ���C����
void main (void){
OSCCON = 0b01110010; // ���� 8MHz
ANSEL = 0; // �S�A�i���OOFF
unsigned int DousaTime,KanketuTime; //�錾�B#define���炱����ɕύX
char change;
PORTA=0;//�o�͂̃s���������ݒ�B
// ���o�͐ݒ�
TRISA = 0b01000011;
TRISB = 0b11111111;//���_�����[�^���[�X�C�b�`2�BRB0-3�����쎞�ԁARB4-7���Ԍ�����
OPTION_REG=0b00000000;//�|�[�gB�v���A�b�v
unsigned int TIME[]={60,100,150,200,300,600,900,1200,1800,2400,3000,6000,9000,12000,15000,180};//unsigned int��65000�܂�
//PIC�ɓd�������������m�点�q�`�S��_��
RA4=0;
//�l�n�c�d���ω��Ȃ���q�`�S�͂��̂܂ܓ_��
while(RA0==1&&RA1==1){}
//�l�n�c�d���ς������q�`�S�͏���
RA4=1;
// �i�v���[�v
while(1){
MODE=PORTA&0b11;
__delay_ms(50);
while(MODE!=(PORTA&0b11)){ //�ω�������E�F�C�g�A������Ίm��
MODE=PORTA&0b11;
__delay_ms(50);
�ȉ��@�@�@��
�v�`�n�b�s�[
����悤�Șb�Ȃ̂ł��B
�ҋ����b�N����Ƃ̂�����ʂ��āA
���̎����́A��͂�Aarduino�ɂ͋y�Ȃ��Ƃ����̂��ǂ�������܂����B
�\��̃v�`���o�ł����A�Z���̐��E�Ŏg����P��Ȃ�ł����A���܂�C�ɂ��Ȃ��ʼn������B
�b����ƌ����Ă��F�X����ȁ`�Ƃ��������ł��B
�łȂ�ł����A
�����I�ɂ́A�@�o�h�b�̃v���O���~���O�ňȉ��̎���������܂����B
����́A�������Ȃ��ő�����ł��B
while(RA5==1){}�@���̓���o�p�����ɂ���A�������Ȃ��Ƃ����Ӗ��ɂȂ��āA
RB=1�@�̓���𑱂��邱�ƂɂȂ�B
�܂�A�o�h�b�ɓd�������������Ƃ�����ԕ\�����k�d�c���_�����邱�Ƃɂ���Ĕc���ł���Ƃ������ł��B
// LED�̃s����1�ɂ��āALED��_������
RB7=1;
//�r�v���n�m�ɂȂ�Ȃ�����̂܂�
while(RA5==1){}
���ꂩ��Amabo������A�o�h�b�R�̎���d��������Ă݂ĉ������B
���肵�ď������݂��o����l�ɂȂ�܂��B
�NjL
�Ԍ��v���O�������ꕔ�C��
�C�����e
�o�h�b�ɒʓd�����m�点�p�ɂq�`�S��_�������A
�l�n�c�d������q�`�S������������B
// ���C����
void main (void){
OSCCON = 0b01110010; // ���� 8MHz
ANSEL = 0; // �S�A�i���OOFF
unsigned int DousaTime,KanketuTime; //�錾�B#define���炱����ɕύX
char change;
PORTA=0;//�o�͂̃s���������ݒ�B
// ���o�͐ݒ�
TRISA = 0b01000011;
TRISB = 0b11111111;//���_�����[�^���[�X�C�b�`2�BRB0-3�����쎞�ԁARB4-7���Ԍ�����
OPTION_REG=0b00000000;//�|�[�gB�v���A�b�v
unsigned int TIME[]={60,100,150,200,300,600,900,1200,1800,2400,3000,6000,9000,12000,15000,180};//unsigned int��65000�܂�
//PIC�ɓd�������������m�点�q�`�S��_��
RA4=0;
//�l�n�c�d���ω��Ȃ���q�`�S�͂��̂܂ܓ_��
while(RA0==1&&RA1==1){}
//�l�n�c�d���ς������q�`�S�͏���
RA4=1;
// �i�v���[�v
while(1){
MODE=PORTA&0b11;
__delay_ms(50);
while(MODE!=(PORTA&0b11)){ //�ω�������E�F�C�g�A������Ίm��
MODE=PORTA&0b11;
__delay_ms(50);
�ȉ��@�@�@��
�v�`�n�b�s�[
TR 2018/11/07(Wed) 06:32 Re: �o�h�b�������ݎ���d��
�s�q����C�ҋ����b�N����C�����́B
�s�q����CPICKIT3�̏�肪�Ƃ��������܂��B
���́C�d��������USB�|�[�g���g���āC�������݂�
�ł����̂ŁC����g�������ȂƎv���܂��B
arduino����������Ƃ����������Ă݂܂������CC���C�N�Ȍ���
�݂����Ȃ̂ŁC���v�Ȃ悤�ȋC�����܂����CAPI�Ƃ������C
�o����̂����\����悤�Ȃ������܂����B
�����C���Ӌ@��́C�����Ȃ��̂�����̂ŁC���̓_�͕֗����ȂƎv���܂����B
���ꂩ��C�s�q���V�����o�b�F���̂�ł����C�����C���������N���āC
�l�`�b���ق����Ȃ�܂����B
���o���������̃A�v�����g���ėV�т����Ȃ�܂����B
���J���Ȃ��Ď����̎��@�����Ŋm�F����̂ɂ́C��p�͂�����Ȃ��悤�Ȃ̂ŁB
���J����ƔN�Ԗ�P���~���炢������悤�ł��B
�s�q����CPICKIT3�̏�肪�Ƃ��������܂��B
���́C�d��������USB�|�[�g���g���āC�������݂�
�ł����̂ŁC����g�������ȂƎv���܂��B
arduino����������Ƃ����������Ă݂܂������CC���C�N�Ȍ���
�݂����Ȃ̂ŁC���v�Ȃ悤�ȋC�����܂����CAPI�Ƃ������C
�o����̂����\����悤�Ȃ������܂����B
�����C���Ӌ@��́C�����Ȃ��̂�����̂ŁC���̓_�͕֗����ȂƎv���܂����B
���ꂩ��C�s�q���V�����o�b�F���̂�ł����C�����C���������N���āC
�l�`�b���ق����Ȃ�܂����B
���o���������̃A�v�����g���ėV�т����Ȃ�܂����B
���J���Ȃ��Ď����̎��@�����Ŋm�F����̂ɂ́C��p�͂�����Ȃ��悤�Ȃ̂ŁB
���J����ƔN�Ԗ�P���~���炢������悤�ł��B
mabo 2018/11/07(Wed) 22:58 No.1194 Re: �o�h�b�������ݎ���d��
>arduino����������Ƃ����������Ă݂܂������CC���C�N�Ȍ���
�݂����Ȃ̂ŁC���v�Ȃ悤�ȋC�����܂����CAPI�Ƃ������C
�o����̂����\����悤�Ȃ������܂����B
����Ȃ�ł���B
�����̏ꍇ�A�b���ꏉ�S�҂Ȃ̂ŁA
�悸�́A�L�b�g�ŗV�ڂ��̋��{���}�X�^�[�������Ǝv���Ă��܂��B
���݂́A�o�v�l��ǂݎn�߂܂����B
�����A���{�̂o�h�b��16�e627�`�Ȃ̂ŁA16�e88�ɂ͓K�����Ȃ�����������܂��B
�Ȃ̂ŁA�f�[�^�[�V�[�g�����{��łȂ�Ȃ�ƁA�������v���܂��B
���{�����88�̃f�[�^�V�[�g�����Ă��܂�������ł�(-_-;)
�f�X�N�g�b�v�ł����A���Ƀ|�`�b�g�s���܂����B
�c�d�k�k�ł��B
�����̒��x�͒m��Ă��܂��̂ŁA
���[�X�y�b�N�ł��B
�ł��A�y���݂ł��B
24�C���`�Ȃ̂ŁA��̎����ɂ��D�����ł��B
����ɁA���ꂪ�Ō�̂o�b�ł��傤�B�i��
�݂����Ȃ̂ŁC���v�Ȃ悤�ȋC�����܂����CAPI�Ƃ������C
�o����̂����\����悤�Ȃ������܂����B
����Ȃ�ł���B
�����̏ꍇ�A�b���ꏉ�S�҂Ȃ̂ŁA
�悸�́A�L�b�g�ŗV�ڂ��̋��{���}�X�^�[�������Ǝv���Ă��܂��B
���݂́A�o�v�l��ǂݎn�߂܂����B
�����A���{�̂o�h�b��16�e627�`�Ȃ̂ŁA16�e88�ɂ͓K�����Ȃ�����������܂��B
�Ȃ̂ŁA�f�[�^�[�V�[�g�����{��łȂ�Ȃ�ƁA�������v���܂��B
���{�����88�̃f�[�^�V�[�g�����Ă��܂�������ł�(-_-;)
�f�X�N�g�b�v�ł����A���Ƀ|�`�b�g�s���܂����B
�c�d�k�k�ł��B
�����̒��x�͒m��Ă��܂��̂ŁA
���[�X�y�b�N�ł��B
�ł��A�y���݂ł��B
24�C���`�Ȃ̂ŁA��̎����ɂ��D�����ł��B
����ɁA���ꂪ�Ō�̂o�b�ł��傤�B�i��
TR 2018/11/09(Fri) 07:51 Re: �o�h�b�������ݎ���d��
�s�q����C�ҋ����b�N����C���͂悤�������܂��B
���f�X�N�g�b�v�ł����A���Ƀ|�`�b�g�s���܂����B
���c�d�k�k�ł��B
�|�`��܂������E�E�E�E�B
������ɁA���ꂪ�Ō�̂o�b�ł��傤�B�i��
�Ō�̍ŏ���������܂����B�i�j��́C�Ȃ����ł���B�i�j
�ŋ߂́C�f�X�N�g�b�v�͎g���Ă��܂��C
���炭�O�́C�f�X�N�g�b�v�͎����őg�ݗ��ĂĂ܂����B
�����C�w�o�ɂȂ��āC�C���X�g�[���ɐ������o�āC
��̃\�t�g�ŃC���X�g�[���ł���䐔�Ɍ��肪�łāC
����ŁC����́C���ɂȂ���܂����B
�f�X�N�g�b�v�́C�g�����������ł���ˁB
�O���t�B�b�N�{�[�h�݂�����C���̑��C�����Ȃ�Ɋg���ł���Ǝv���܂��B
�������C�V���A���|�[�g�̈��萫�������̂����͂ł��ˁB
�m�[�g�ɂ́C�قƂ�ǃV���A���|�[�g�͂��Ă��܂���ˁC�ŋ߂̂��̂́B
�o�h�b�ł����C�P�U�e�U�Q�V�`�͊m���P�U�e�W�W�̏�ʌ݊��@�������悤�ȋC�����܂��B
�ׂ��������ł́C���낢��Ⴂ������̂ł��傤���C����ȂɋC�ɂ��Ȃ��Ă������悤�Ȃ��ł����B
�����Ƃ��C�b�n�m�e�h�f���̋L�ڂ́C��Ⴄ�̂�������܂���ˁB
��������|�`��܂������C�|�`�������X���C�������ŁC
�w���̎葱���ł��܂���ł����B
���f�X�N�g�b�v�ł����A���Ƀ|�`�b�g�s���܂����B
���c�d�k�k�ł��B
�|�`��܂������E�E�E�E�B
������ɁA���ꂪ�Ō�̂o�b�ł��傤�B�i��
�Ō�̍ŏ���������܂����B�i�j��́C�Ȃ����ł���B�i�j
�ŋ߂́C�f�X�N�g�b�v�͎g���Ă��܂��C
���炭�O�́C�f�X�N�g�b�v�͎����őg�ݗ��ĂĂ܂����B
�����C�w�o�ɂȂ��āC�C���X�g�[���ɐ������o�āC
��̃\�t�g�ŃC���X�g�[���ł���䐔�Ɍ��肪�łāC
����ŁC����́C���ɂȂ���܂����B
�f�X�N�g�b�v�́C�g�����������ł���ˁB
�O���t�B�b�N�{�[�h�݂�����C���̑��C�����Ȃ�Ɋg���ł���Ǝv���܂��B
�������C�V���A���|�[�g�̈��萫�������̂����͂ł��ˁB
�m�[�g�ɂ́C�قƂ�ǃV���A���|�[�g�͂��Ă��܂���ˁC�ŋ߂̂��̂́B
�o�h�b�ł����C�P�U�e�U�Q�V�`�͊m���P�U�e�W�W�̏�ʌ݊��@�������悤�ȋC�����܂��B
�ׂ��������ł́C���낢��Ⴂ������̂ł��傤���C����ȂɋC�ɂ��Ȃ��Ă������悤�Ȃ��ł����B
�����Ƃ��C�b�n�m�e�h�f���̋L�ڂ́C��Ⴄ�̂�������܂���ˁB
��������|�`��܂������C�|�`�������X���C�������ŁC
�w���̎葱���ł��܂���ł����B
mabo 2018/11/09(Fri) 09:35 No.1196
- JoyfulNote v6.02 -
++ Edited by Hamel ++