 Home
Home Item
Item �V�K���e
�V�K���e �A���o��
�A���o�� ���[�h����
���[�h���� �ߋ����O
�ߋ����O Topic
Topic Notice
Notice Admin
Admin
48���Ԉȓ��̋L����  �ŕ\������܂�
�ŕ\������܂�
�ŕ\������܂�
��A���̂����A
���N�����悢��I���ł��ˁB
��ς����b�ɂȂ�܂����B
���N�͗�N�ɂȂ��A�����Ƃ����ԂɏI��������Ċ��������܂��B
���A�l�ŁA�a�C�������Ȃ��߂����܂����B
�����́A�Ō�̑�|���A�K���ɂ���āA��͍D���Ȏ��ł����܂��B
���ꂩ��A���[�^�[��PWM����ł����A�ʐ^������ł��B�ꉞ�A�����Ƃ��܂����B
�ȑO�̂��̂́A�H����PWM�L�b�g�ƁASEC�����̐M������{�[�h��2�����K�v�ŁA�傫�Ȃ��̂ł������A
PIC�ɂ��A�֗��ɂȂ芎�A�������Ȃ�܂����B
������A�F�l���̂��A�ł��B
���N���X�������肢���܂��B
 TR
TR  2018/12/31(Mon) 08:13
2018/12/31(Mon) 08:13 Re: ��A���̂����A
 ���̋^����p�̕��́A�ꉞ�A�����ڑO�ł��B
���̋^����p�̕��́A�ꉞ�A�����ڑO�ł��B���Ǝc��̂�
�E��̃R�[�h�̏�������
�E�\���V�[��
�EUSB�P�[�u���i1.5m�̃P�[�u�����Ƃ�����ƒZ�������̂�3m�̂��j
�ʂɂȂ�܂����B
����m�F�������̂ł����ǁA�Ⴆ��1�N���b�N������1mm��0.1mm����
�����ƃo�b�t�@�ɗ��܂��������A�_�C������~����}�V���������܂�
���̕ӂ肪���ɂ����悤�Ɋ����܂����B
�Ƃ������A1mm�̃����W�͋t�Ɍ듮��Ɍq����₷���̂ŕt���Ȃ����������ł����B
MABO����̎�p�͂��̕ӂ�͂ǂ��Ȃ��Ă���̂ł��傤���H
���͂��̈ʒu�i1mm�̃����W��\�肵�Ă����X���C�h�X�C�b�`�ʒu�j�͋^���p���[�I�t������s�ɂ��悤���Ǝv���Ă��܂��B
����ƁA�_�C�������Ɓ����Ȃǂ̃L�[�𑗂��Ă���̂ł����ǁASTEP�w��͑����Ă��܂���B
�f�t�H���g��STEP�ɂ��Ă��邩��ł��B
�ł��A�r���ŁAPC��ʏ��CONT�ɐ�ւ����ꍇ�ɁA��ւ��������A�^����p�������Ă��Ȃ��̂�CONT���[�h��
�Ȃ��Ă��܂��Ă��܂��B
���̂�����́A�Ⴆ��
�E�O�삩��1�b�ȏ�o�߂��Ă��ă_�C�������������STEP�w��̃R�[�h�����違�듮��h�~�ׂ̈�
�@1�N���b�N�ڂ͉Ȃ�
�@�܂�A�O��1�b�o�߂��Ă�����A�ŏ��̃N���b�N��STEP�w������āA�o�߂��Ă��Ȃ���Γ������L�[�R�[�h�������
�Ƃ����Ώ��ɂ��悤�Ǝv���܂��B
�Ă������A���̕����̃R�[�h�͊��ɏ��������܂����B�^���p���[�I�t�̕��͑S�̂����Ȃ���Ȃ�Ȃ��̂ł܂��ł��B
������c�O�ȓ_�́A��������G���R�[�_�Ȃ̂ŁA�_�C������t����ƌa���傫���ăN���b�N�������Ȃ��Ȃ�܂��B
�����Ȃ�ƁA���₷���Ȃ��Ă��܂��A�듮��Ɍq����₷���Ǝv���܂��B
�Ȃ̂ŁA�����Ŋ�������āA��~�ʒu����邩������܂���B�ł��A����͌�ɒu���Ƃ��āA��肠�������̂܂g�����Ǝv���܂��B
����[�A���͐VPC�̕��Ȃ̂ł����ǁA�g���Ă����牽�̂�MACH������������Ȃ��Ȃ��Ă��܂��āA
�uMACH3���N������Ɠ�����PC���ċN������v�A�Ƃ������ۂɌ������܂����B
PC�Ƃ��Ă͉��ُ̈��������ꂸ�T�N�T�N�����܂��B
�ŁA�p�������h���C�o��MACH�̍ăC���X�g�[���������ĂȂ�Ƃ�MACH���N��������Ƃ���܂ōs���Ă��A
���̂����͓����Ȃ��i����ǂ��A���~�b�g�X�C�b�`���͔������Ă���j�Ƃ����ł����B
�ŁA�p�������h���C�o�H���Ⴄ�ݒ�ɕς�����A�܂�PC�̍ċN���ɂȂ�����c�ƁA���X����ł��B
���ǁAOS�̃��J�o���[����n�߂āA�O��PC�ɕt���Ă����O���t�B�b�N�{�[�h�����t��������肵�܂����B
���̌�ɁA��p�̊�؍��_�C�������̉��H�Ȃǂ��A�e�X�g�����˂Ă��Ă����̂ł����ǁA���̊Ԃ͉�����薳���ł��B
�v���O������ň�ԍ�������̂́A�����R�[�h���L�[�R�[�h�ϊ��ł����B
������2�o�C�g�̃R�[�h��MACH3�ɕt���Ă���SCREEN4�ŁA�z�b�g�L�[���͂̎��Ɋm�F�ł���̂ł����ǁA
���ۂɁA�}�C�R�����瑗����R�[�h���A���傭���傭����ƈ�v���Ȃ���ł���ˁB
����Ctrl+Alt���g���ƑS�R�Ⴄ�L�[�R�[�h���������ꂽ�肵�܂��B
ALT�����ł��A�Ⴆ��MACH3�̒�~�iSTOP�j��ALT+S�L�[�ł����ǁA
Keyboard.press(KEY_LEFT_ALT);
Keyboard.press('s');
��S���������̕�����Ȃ��Ƒʖڂ�������ł��B
�}�C�R������́A�R�[�h�������ă}�C�R���ɏ�������ŁASCREEN4�̂��̉�ʂŎ����ē��������ɂȂ邩���m�F�A
�݂����Ȃ��Ƃ����Ȃ��Ɖ��Ԃ����ۂɑ����Ă���̂�����Ȃ��̂ő�ςł����B
�܂��AWINDOWS��MACH3���̂Ɏg���Ă���V���[�g�J�b�g�L�[���͂����肵�Ȃ��̂ŁA�ǂ̃L�[�Ɋ��蓖�ĂĂ����̂��H�Ƃ���������
�v���̂ق���Ԏ��܂����B
�T���ǂ����Ɉꗗ�\�݂����Ȃ��̂�����̂ł��傤���H
�܂��A�v��ʏ��ɗ��Ƃ����͂�����̂ł��B
 �ҋ����b�N 2018/12/31(Mon) 10:06 No.1407
�ҋ����b�N 2018/12/31(Mon) 10:06 No.1407 Re: ��A���̂����A
�����܂����܂ŗ��Ă悩�����ł��ˁB
�ҋ����b�N����Ȃ�ł���̂ł��傤���ǁA�����ł���B
������Ƃ��������Ă��������B
No.1386�ŁA
�����ۂ͑O�̐��s�̓���50��50.0�Ɓu.0�v��t���Ăق����A�ƌ������ł��B
�ƌ����Ă��܂����A�ǂ�����0��t���Ȃ��Ƃ����Ȃ��̂ł��傤���H
�X�������肢���܂��B
�NjL
�l�b�g�Łu���������_�v�Ō���������A����܂����B
�R���s���[�^�[�̐��E�̂��Ƃ̂悤�ł��ˁB
�������ӂ���N�����Ȃ��悤�ɁA�����_�ȉ���P�ʂ�0��t���Čv�Z��������ł��ˁB
�ҋ����b�N����Ȃ�ł���̂ł��傤���ǁA�����ł���B
������Ƃ��������Ă��������B
No.1386�ŁA
�����ۂ͑O�̐��s�̓���50��50.0�Ɓu.0�v��t���Ăق����A�ƌ������ł��B
�ƌ����Ă��܂����A�ǂ�����0��t���Ȃ��Ƃ����Ȃ��̂ł��傤���H
�X�������肢���܂��B
�NjL
�l�b�g�Łu���������_�v�Ō���������A����܂����B
�R���s���[�^�[�̐��E�̂��Ƃ̂悤�ł��ˁB
�������ӂ���N�����Ȃ��悤�ɁA�����_�ȉ���P�ʂ�0��t���Čv�Z��������ł��ˁB
TR 2018/12/31(Mon) 11:50 Re: ��A���̂����A
����ɂ�int�����r�b�g�Ȃ̂��A�܂艽�r�b�g��W���ɂ��Ă���R���p�C���Ȃ̂��H�Ƃ�����肪����܂��B
�E�B���h�E�Y��C�R���p�C���Ȃ����32bit�ł����ǁA8�r�b�g�}�C�R���̃R���p�C���͑��́A16bit��int����ƂȂ�
�����̌^�ł��BXC8��int��16bit�ł��B
�ŁA�v�Z����ߒ��͕W����16bit�܂ł̌v�Z�ɂȂ�܂��B�܂�v�Z�p��16bit�̃��������p�ӂ���܂��B
�Ⴆ��
unsigned char a=256*256/512;
�Ƃ����ꍇ�A�ʏ�̌v�Z�Ȃ�128�ł����ǁA256*256�̌v�Z�ł��ł�0x10000�i65536�j�Ȃ̂ŁA0x�u1�v0000��
1�̓������͈͊O�ɂȂ�̂ŏ�����0�ɂȂ�܂��B�܂�0/512��a��0�ɂȂ�܂��B
�����������̎��̏ꍇ�́A�}�C�R���ɂ͌v�Z���͓��炷�A�R���p�C���ߒ��ŁA���łɁu256*256/512�v���v�Z����
���Xunsigned char a=128;�Ə�����Ă���v���O�����Ƃ��āA�R���p�C�������Ǝv���܂��B256���ϐ��Ƃ��čl���Ă��������B
long a=
�Ƃ����ꍇ�͍ŏ�����32bit���v�Z�p�̃������Ƃ��Ă��Ă����܂��B
�v�Z�����͎l�����Z�͂����悻���ʂ̌v�Z�Ɠ����ł��B
�i�j�J�b�R���t���Ă��镔�����D�悳��A����*/%���D�悳��A����+-�ōŌ��=�ł��B
�����āAx/%+-�͍�����E�Ɍv�Z����܂��B=�͉E���獶�ł��B
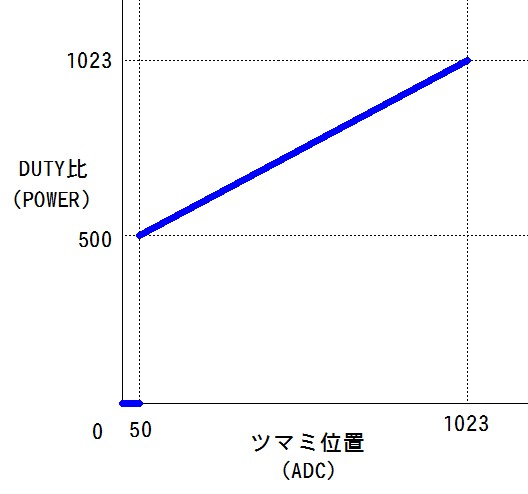
num=(num-50)*(1023-500)/(1023-50)+500;
�́A������ƕό`�i�v�Z�j�����
num=(num-50)*523/973+500;
�Ȃ̂ŁA�ŏ���(num-50)*523�̒i�K�ŁAnum��175���x�̒i�K�Ō������܂��B
���Ƃ͈Öق̌^�ϊ��A�Ƃ������̂𗝉�����K�v������܂��B
char��int�Ƃ̌v�Z�ł�int�Ƃ��Čv�Z����܂��B
int��long�ł�long�Ƃ��Čv�Z����܂��B
char��int��long��float�̌v�Z�ł�float�Ƃ��Čv�Z����܂��B
�܂�͈͂̍L�����Ōv�Z����܂��B
�Ȃ̂ŁA50�Ȃ��int�Ƃ���16bit�̐����ł����ǁA50.0�Ɓu.0�v��t����Ƃ����float�^�̕��������̃������ɔz�u����܂��B
�ŁA(num-50.0)��float�Ƃ��Čv�Z����A����*523���܂�float�~int�Ȃ̂�float�Ƃ��Čv�Z����A�c�ƂȂ�A�����ӂ�ɂ͂Ȃ�܂���B
�����āA�Ŋ��́unum=�v�̎��ɂ���float�l��int�Ƃ��ĕϊ�����đ������܂��B
�E�B���h�E�Y��C�R���p�C���Ȃ����32bit�ł����ǁA8�r�b�g�}�C�R���̃R���p�C���͑��́A16bit��int����ƂȂ�
�����̌^�ł��BXC8��int��16bit�ł��B
�ŁA�v�Z����ߒ��͕W����16bit�܂ł̌v�Z�ɂȂ�܂��B�܂�v�Z�p��16bit�̃��������p�ӂ���܂��B
�Ⴆ��
unsigned char a=256*256/512;
�Ƃ����ꍇ�A�ʏ�̌v�Z�Ȃ�128�ł����ǁA256*256�̌v�Z�ł��ł�0x10000�i65536�j�Ȃ̂ŁA0x�u1�v0000��
1�̓������͈͊O�ɂȂ�̂ŏ�����0�ɂȂ�܂��B�܂�0/512��a��0�ɂȂ�܂��B
�����������̎��̏ꍇ�́A�}�C�R���ɂ͌v�Z���͓��炷�A�R���p�C���ߒ��ŁA���łɁu256*256/512�v���v�Z����
���Xunsigned char a=128;�Ə�����Ă���v���O�����Ƃ��āA�R���p�C�������Ǝv���܂��B256���ϐ��Ƃ��čl���Ă��������B
long a=
�Ƃ����ꍇ�͍ŏ�����32bit���v�Z�p�̃������Ƃ��Ă��Ă����܂��B
�v�Z�����͎l�����Z�͂����悻���ʂ̌v�Z�Ɠ����ł��B
�i�j�J�b�R���t���Ă��镔�����D�悳��A����*/%���D�悳��A����+-�ōŌ��=�ł��B
�����āAx/%+-�͍�����E�Ɍv�Z����܂��B=�͉E���獶�ł��B
num=(num-50)*(1023-500)/(1023-50)+500;
�́A������ƕό`�i�v�Z�j�����
num=(num-50)*523/973+500;
�Ȃ̂ŁA�ŏ���(num-50)*523�̒i�K�ŁAnum��175���x�̒i�K�Ō������܂��B
���Ƃ͈Öق̌^�ϊ��A�Ƃ������̂𗝉�����K�v������܂��B
char��int�Ƃ̌v�Z�ł�int�Ƃ��Čv�Z����܂��B
int��long�ł�long�Ƃ��Čv�Z����܂��B
char��int��long��float�̌v�Z�ł�float�Ƃ��Čv�Z����܂��B
�܂�͈͂̍L�����Ōv�Z����܂��B
�Ȃ̂ŁA50�Ȃ��int�Ƃ���16bit�̐����ł����ǁA50.0�Ɓu.0�v��t����Ƃ����float�^�̕��������̃������ɔz�u����܂��B
�ŁA(num-50.0)��float�Ƃ��Čv�Z����A����*523���܂�float�~int�Ȃ̂�float�Ƃ��Čv�Z����A�c�ƂȂ�A�����ӂ�ɂ͂Ȃ�܂���B
�����āA�Ŋ��́unum=�v�̎��ɂ���float�l��int�Ƃ��ĕϊ�����đ������܂��B
�ҋ����b�N 2018/12/31(Mon) 13:17 No.1409 Re: ��A���̂����A
�ҋ����b�N�����ɂ��肪�Ƃ��������܂��B
�������A�ҋ����b�N�����������i�́A���l�i�ɂ��Ǝv���܂����A
�����̂���l�ɔ�����Ȃ��ł����H
USB�Ή��̂悤�ł����A�����̃X���[�X�X�e�b�p�[�ɍ�������Ŏg���邩�ȁ`�B
���̎�p�́A�z����������ł��B
����ƁA��i�́A����̊�ł����H
�����ł��ˁ`�B
�����̓��j�o�[�T���ł���B
���ł��B
USB�ڑ�OK�Ȃ�A��������Ƃ��܂��ˁB�����ƁB
�������A�ҋ����b�N�����������i�́A���l�i�ɂ��Ǝv���܂����A
�����̂���l�ɔ�����Ȃ��ł����H
USB�Ή��̂悤�ł����A�����̃X���[�X�X�e�b�p�[�ɍ�������Ŏg���邩�ȁ`�B
���̎�p�́A�z����������ł��B
����ƁA��i�́A����̊�ł����H
�����ł��ˁ`�B
�����̓��j�o�[�T���ł���B
���ł��B
USB�ڑ�OK�Ȃ�A��������Ƃ��܂��ˁB�����ƁB
TR 2018/12/31(Mon) 14:53 Re: ��A���̂����A
�ҋ����b�N����C�s�q����C�����́B
��������������������������������������
���N���������܂�܂����ˁB
���낢�날�肪�Ƃ��������܂����B
���ɂȂ�܂����B
���N����낵�����肢�������܂��B
����������������������������������
��������������������������������������������������
�ҋ����b�N����C
���Ƃ������A1mm�̃����W�͋t�Ɍ듮��Ɍq����₷���̂ŕt���Ȃ����������ł����B
��MABO����̎�p�͂��̕ӂ�͂ǂ��Ȃ��Ă���̂ł��傤���H
����C���݂܂���B���̊��ł́C�m�F���Ă��܂���B
�Ƃ������C�b�m�b���C���܂߂āC�H�[�����Ƃ̕��ɂ���̂ŁC
���̂Ƃ���C�������ĂȂ��̂ł��B
�Ƃ�����ŁC�Ȃ�Ƃ������Ȃ��̂ŁC�\����܂���B
����ƁC
�����ǁAOS�̃��J�o���[����n�߂āA�O��PC�ɕt���Ă����O���t�B�b�N�{�[�h�����t��������肵�܂����B
�́C�����̓O���t�B�b�N�{�[�h��������ł��傤���ˁB
�����C�O�̂��߂b�m�b�p��PC�ɂ́CON�{�[�h�̃O���t�B�b�N�O���āC�����O���t�B�b�N�{�[�h�}���Ă܂��B
������C
���}�C�R������́A�R�[�h�������ă}�C�R���ɏ�������ŁASCREEN4�̂��̉�ʂŎ����ē��������ɂȂ邩���m�F�A
�݂����Ȃ��Ƃ����Ȃ��Ɖ��Ԃ����ۂɑ����Ă���̂�����Ȃ��̂ő�ςł����B
�@����ɁC�ҋ����b�N����ł��C����J�Ȃ����ł�����C����̂��Ȃ��Ǝv���Ă܂��B
���Ȃ݂ɁC�������Ă݂�ƁC
http://blog-imgs-70-origin.fc2.com/g/a/r/garagejb/mkp13.jpg
http://blog-imgs-70-origin.fc2.com/g/a/r/garagejb/mkp14.jpg
https://blogs.yahoo.co.jp/borog_602/19815995.html
���q�b�g���܂����B
��������������������������������������������������������
////////////////////////////////////////////////////////
�s�q����C�������߂łƂ��������܂��B
�������ōl�����āC����C���p�ɂ��Ă��܂��̂ł�����C
�������S�������܂��B
���́C�����C���z�͂����̂ł����C�r�����܁C
�Ȃ�Ă����p�^�[���������̂ŁC����܂��B
��������������������������������������
���N���������܂�܂����ˁB
���낢�날�肪�Ƃ��������܂����B
���ɂȂ�܂����B
���N����낵�����肢�������܂��B
����������������������������������
��������������������������������������������������
�ҋ����b�N����C
���Ƃ������A1mm�̃����W�͋t�Ɍ듮��Ɍq����₷���̂ŕt���Ȃ����������ł����B
��MABO����̎�p�͂��̕ӂ�͂ǂ��Ȃ��Ă���̂ł��傤���H
����C���݂܂���B���̊��ł́C�m�F���Ă��܂���B
�Ƃ������C�b�m�b���C���܂߂āC�H�[�����Ƃ̕��ɂ���̂ŁC
���̂Ƃ���C�������ĂȂ��̂ł��B
�Ƃ�����ŁC�Ȃ�Ƃ������Ȃ��̂ŁC�\����܂���B
����ƁC
�����ǁAOS�̃��J�o���[����n�߂āA�O��PC�ɕt���Ă����O���t�B�b�N�{�[�h�����t��������肵�܂����B
�́C�����̓O���t�B�b�N�{�[�h��������ł��傤���ˁB
�����C�O�̂��߂b�m�b�p��PC�ɂ́CON�{�[�h�̃O���t�B�b�N�O���āC�����O���t�B�b�N�{�[�h�}���Ă܂��B
������C
���}�C�R������́A�R�[�h�������ă}�C�R���ɏ�������ŁASCREEN4�̂��̉�ʂŎ����ē��������ɂȂ邩���m�F�A
�݂����Ȃ��Ƃ����Ȃ��Ɖ��Ԃ����ۂɑ����Ă���̂�����Ȃ��̂ő�ςł����B
�@����ɁC�ҋ����b�N����ł��C����J�Ȃ����ł�����C����̂��Ȃ��Ǝv���Ă܂��B
���Ȃ݂ɁC�������Ă݂�ƁC
http://blog-imgs-70-origin.fc2.com/g/a/r/garagejb/mkp13.jpg
http://blog-imgs-70-origin.fc2.com/g/a/r/garagejb/mkp14.jpg
https://blogs.yahoo.co.jp/borog_602/19815995.html
���q�b�g���܂����B
��������������������������������������������������������
////////////////////////////////////////////////////////
�s�q����C�������߂łƂ��������܂��B
�������ōl�����āC����C���p�ɂ��Ă��܂��̂ł�����C
�������S�������܂��B
���́C�����C���z�͂����̂ł����C�r�����܁C
�Ȃ�Ă����p�^�[���������̂ŁC����܂��B
mabo 2018/12/31(Mon) 19:50 No.1411 PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
�ւ���̂́@�ȉ���1�s�ł�낵���ł����H
num=(num-50.0)*(1023-500)/(1023-50)+500;
num=(num-50.0)*(1023-500)/(1023-50)+500;
TR 2018/12/29(Sat) 06:47 Re: PWM/AD�����[
 > MABO����
> MABO�������ʒ����ȊO�ł�B�J�[�u���ǂ���Ȃ��ł����H
���ʂł��A���ڂ̃A�i���O����ł͂Ȃ��A�}�C�R���Ȃǂɓ����̂Ȃ�
��͂�B�J�[�u���ǂ��Ǝv���܂��B
�ŁA�^����p�ł����ǁA���݁A�Y�t�摜�̂悤�ȂƂ���܂ŗ��Ă��܂��B
�ŁA����Ή���悤��PRO MICRO�ɂ��܂����B
�ł��A����Ă��ċC�t�����̂ł����ǁASTM32�ł��s���w�b�_���t�����A�܂�A
�u�[�g�W�����p�[�Ɠ������ɕt������������ɉ��������ĉ�����肪�������ɋC�Â��܂����B
����[�A����ȒP���Ȏ��ɋC�Â��Ȃ������Ƃ́c(;'��')
�v���O�����������I�ȓ���͊m�F���܂����B
����̓_�œ����̗\�肩��ύX�ɂȂ肻���ł��B
>TR����
�O�̐��s�̓��̂��̍s�������ւ��Ă��������B
���͐����������H�̂ł����A�����ӂꂪ�N�������̂ł��傤�B
���ۂ͑O�̐��s�̓���50��50.0�Ɓu.0�v��t���Ăق����A�ƌ������ł��B
�ҋ����b�N 2018/12/29(Sat) 07:02 No.1386 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
>�O�̐��s�̓��̂��̍s�������ւ��Ă��������B
�m�F�������������B
�ȉ��ł����̂ł��傤���H
�ǂ��i���ł��܂����ˁB
while (1) {
if(RB7==0){__delay_ms(10);break;}
LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
num= adconv(); // RB3��RB4���甼�Œ��R�̒l��ǂݍ���
if(num<50){
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}else{
num=(num-50.0)*(1023-500)/(1023-50)+500;
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
}
CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
CCP1CONbits.DC1B = num & 0b11;
__delay_ms(10);
}
�m�F�������������B
�ȉ��ł����̂ł��傤���H
�ǂ��i���ł��܂����ˁB
while (1) {
if(RB7==0){__delay_ms(10);break;}
LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
num= adconv(); // RB3��RB4���甼�Œ��R�̒l��ǂݍ���
if(num<50){
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}else{
num=(num-50.0)*(1023-500)/(1023-50)+500;
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
}
CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
CCP1CONbits.DC1B = num & 0b11;
__delay_ms(10);
}
TR 2018/12/29(Sat) 12:05 Re: PWM/AD�����[����
 ����if�`else�`��duty������Ă���̂ł�����A������x
����if�`else�`��duty������Ă���̂ł�����A������xCCPR1L = num / 4;
CCP1CONbits.DC1B = num & 0b11;
�Ɠ����킯�Ȃ��ł���B�܂�A���̕����͕s�v�ł��B
�ǐL
�Ƃ͂����A������x����Ă�����قǑ傫�ȉe���͂Ȃ��悤�ȋC�����܂��B
�ʖڂ����Ȃ�A
unsigned int num;
��
long num;
�ɕς��Ă��������B���̏ꍇ��50.0����Ȃ���50���ǂ��ł��B
�Ă������A������̑Ώ��̕����ǂ��ł��B
��
if�`else�`���œY�t�}�̂悤�ɂ��Ă��܂��B
num=(num-50)*(1023-500)/(1023-50)+500;
���Ȃ��ʖڂ������̂��́A�����Ɨ������������ǂ��ł��B
�ŏ���(num-50)*(1023-500)�̌v�Z�ŁA�����ӂꁁ65535�ȏ�ɂȂ�A
�Ƃ������ł��B
�Ȃ̂ŁA32�r�b�g�Ōv�Z�����邩�A���������_�ifloat�j�Ōv�Z�����邩�A�����Ȃ���Ȃ�܂���B
�ҋ����b�N 2018/12/29(Sat) 12:29 No.1388 PWM/AD�����[�����@S�S�ăv���O����
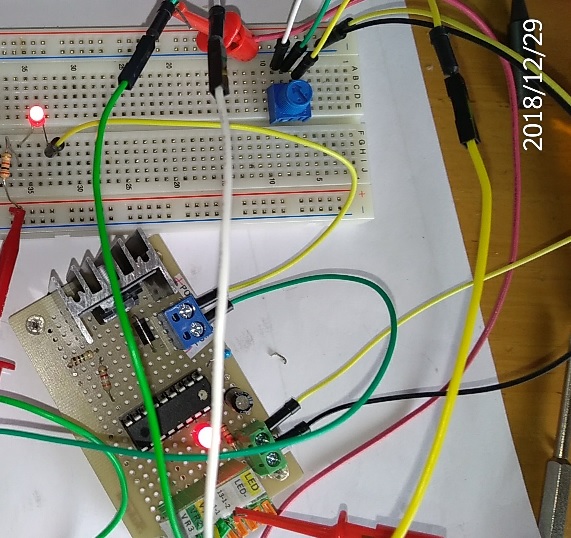 ������Ă݂܂����B
������Ă݂܂����B������������̊�ł��B
VR���i������Ԃ������s����ł��B
CCP1CONbits.DC1B = num & 3;
�}�X�N�����ł����H
���̏������͏��߂Č��������ł��B
�ł��A2����������Ȃ��̂��ȁ`�B
�O���t�L��������܂��B
�ǂ�������܂��B
TR 2018/12/29(Sat) 14:01 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
> VR���i������Ԃ������s����ł��B
����Ȃ�A�~�߂镔����PWM��duty�䂪0�ł͖����A�f�W�^���ɂ��Ď~�߂Ȃ��Ƒʖڂ�������܂���B
��芸�����́Aif�`else�`�ł͖���else�̕��������ɂ��������ǂ���������܂���B
�܂�A
num= adconv();
num=(num-50.0)*(1023-500)/(1023-50)+500;
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
__delay_ms(10);
�ł��B
3��0b11��0x3�͑S�������ł��B�\�L�@���Ⴄ�������l�������₷���`�����ꂼ�����������ł��B
�R���s���[�^�ɂƂ��Ă͂ǂ�������ł��B
����Ȃ�A�~�߂镔����PWM��duty�䂪0�ł͖����A�f�W�^���ɂ��Ď~�߂Ȃ��Ƒʖڂ�������܂���B
��芸�����́Aif�`else�`�ł͖���else�̕��������ɂ��������ǂ���������܂���B
�܂�A
num= adconv();
num=(num-50.0)*(1023-500)/(1023-50)+500;
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
__delay_ms(10);
�ł��B
3��0b11��0x3�͑S�������ł��B�\�L�@���Ⴄ�������l�������₷���`�����ꂼ�����������ł��B
�R���s���[�^�ɂƂ��Ă͂ǂ�������ł��B
�ҋ����b�N 2018/12/29(Sat) 15:17 No.1391 PWM/AD�����[�����@S�S�ăv���O����
�ʖڂł��B
�s����ł��B
if(ADRES > 500 ) {//�{�����[��50��=500/1000�ʂ�
�܂��n�߂ĊԂ��Ȃ������Ȃ̂ŁA�ԈႢ��������Ȃ��Ǝv���܂��B
�悸�f��܂��B
�����͂����v���܂����B
��L���A�V���v����AD�ϊ��������ł����A���肵�Ă��銴������܂�
���̎����v�������̂́A�c�[�����{����́@AD�ϊ��̒��ŁA�ȉ��̌��t�g��
�u���āA500��2�i���ɕϊ����āA���̏��8�r�b�g�≺��2�r�b�g�����߂�͖̂ʓ|�ł��̂ŁA�y�ȕ��@�Ńv���O�������������Ƃɂ��܂��傤�B�v
https://tool-lab.com/make/pic-app-4/
��L�y�[�W�̒�������߂���������ɂ���܂��B
����ƁAPWM�̐��䃍�O�����@���Ő��䂵�Ă��܂��B
https://tool-lab.com/make/pic-app-5/
���̍l���́AAD�ϊ��ɂ��g����Ǝv���܂��B
10�r�b�g�ɂ͕ς��Ȃ��̂ł����v���܂����B
���́A���쑬�x��1MHz�ɂ���A1�ʂ��@�ő��1000�ʂ��̊W�����邩��A
50����500�Əo����Ǝv���܂����B
500�Ƃ���A�T�O���~5V��2.5V�̂Ƃ���A
�����̌��ʂł��A��2.54V�������Ă��܂��B
�ܘ_�A�����ς��J������B��5.1V�ł��B
�NjL
�X�^�[�g���A������MOSFET�̃X���b�V�����d���ɕς��܂��B
�X���b�V�����h�ł��������H�v
�s����ł��B
if(ADRES > 500 ) {//�{�����[��50��=500/1000�ʂ�
�܂��n�߂ĊԂ��Ȃ������Ȃ̂ŁA�ԈႢ��������Ȃ��Ǝv���܂��B
�悸�f��܂��B
�����͂����v���܂����B
��L���A�V���v����AD�ϊ��������ł����A���肵�Ă��銴������܂�
���̎����v�������̂́A�c�[�����{����́@AD�ϊ��̒��ŁA�ȉ��̌��t�g��
�u���āA500��2�i���ɕϊ����āA���̏��8�r�b�g�≺��2�r�b�g�����߂�͖̂ʓ|�ł��̂ŁA�y�ȕ��@�Ńv���O�������������Ƃɂ��܂��傤�B�v
https://tool-lab.com/make/pic-app-4/
��L�y�[�W�̒�������߂���������ɂ���܂��B
����ƁAPWM�̐��䃍�O�����@���Ő��䂵�Ă��܂��B
https://tool-lab.com/make/pic-app-5/
���̍l���́AAD�ϊ��ɂ��g����Ǝv���܂��B
10�r�b�g�ɂ͕ς��Ȃ��̂ł����v���܂����B
���́A���쑬�x��1MHz�ɂ���A1�ʂ��@�ő��1000�ʂ��̊W�����邩��A
50����500�Əo����Ǝv���܂����B
500�Ƃ���A�T�O���~5V��2.5V�̂Ƃ���A
�����̌��ʂł��A��2.54V�������Ă��܂��B
�ܘ_�A�����ς��J������B��5.1V�ł��B
�NjL
�X�^�[�g���A������MOSFET�̃X���b�V�����d���ɕς��܂��B
�X���b�V�����h�ł��������H�v
TR 2018/12/29(Sat) 16:48 Re: PWM/AD�����[�����@
������Ə��ۂݍ��߂܂���B
> VR���i������Ԃ������s����ł��B
����͎��̏������O���t�ŁA�ŏ���0�̃��C������~���̎��������Ă��邩�Ǝv�����̂ł����A�Ⴄ�̂ł��傤���H
�����o���̎߂̕����ł����H
> if(ADRES > 500 ) {//�{�����[��50��=500/1000�ʂ�
�����悻�A�u�܂݂̈ʒu�������ȏ�Ȃ�v�Ƃ����Ӗ������ɂȂ�܂����ǁA
���������Ă���̂��A�܂����������̂��͗ǂ�����܂���B
������ƃy�[�W�������Ă݂���ANo.1380 ��
> �@ if(ADRES > 300 ) {
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
> return temp;} //�ǂݍ���temp��num�ɕԂ�
> }
����̎��ł����H
����̈Ӗ������Ƃ��Ă�
�u�����c�}�~�̈ʒu����30���ȏ�v�Ȃ������x�܂݂̈ʒu���m�F����A�Ƃ����R�[�h�Ɍ����܂��B
�����ɂ��̃R�[�h���������Ȃ̂ł��傤��?
> ��L���A�V���v����AD�ϊ��������ł����A���肵�Ă��銴������܂�
���́u��L�v�Ƃ́uif(ADRES > 500 ) {�v�̂��Ƃł����H
����͕ϊ����ʁ��܂݂̈ʒu�ɉ����ĂȂɂ������悤�Ƃ��Ă���̂ł͂Ȃ��̂ł����H
�u�ϊ��������v���u����v���ǂ��ɂ��v�f���̂�����܂��ǁB
�܂��A����ȍ~���������������̂������ς����܂���B
> �u���āA500��2�i���ɕϊ����āA���̏��8�r�b�g�≺��2�r�b�g�����߂�͖̂ʓ|�ł��̂ŁA�y�ȕ��@�Ńv���O�������������Ƃɂ��܂��傤�B�v
�Ȃ�����Ȍ��t�������ŏo�Ă����̂ł��傤���H
> ���́A���쑬�x��1MHz�ɂ���A1�ʂ��@�ő��1000�ʂ��̊W�����邩��A
> 50����500�Əo����Ǝv���܂���
�����10�r�b�g���ő�1023�̕���\��PWM�Ȃ̂ŁA50���͖�500�ł��B���쑬�x�Ƃ͊W����܂���B
�NjL���܂��B
���C�Â��܂������ǁANo.1387��
> if(RB7==0){__delay_ms(10);break;}
> LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
�́A
RB7��L���x���Ȃ�ċN���B
(����ȊO�Ȃ�A)RA0�s����RA1�s����HIGH�ɂ���B
�Ƃ����Ӗ������ł����ǁA����ł����̂ł��傤���H
> VR���i������Ԃ������s����ł��B
����͎��̏������O���t�ŁA�ŏ���0�̃��C������~���̎��������Ă��邩�Ǝv�����̂ł����A�Ⴄ�̂ł��傤���H
�����o���̎߂̕����ł����H
> if(ADRES > 500 ) {//�{�����[��50��=500/1000�ʂ�
�����悻�A�u�܂݂̈ʒu�������ȏ�Ȃ�v�Ƃ����Ӗ������ɂȂ�܂����ǁA
���������Ă���̂��A�܂����������̂��͗ǂ�����܂���B
������ƃy�[�W�������Ă݂���ANo.1380 ��
> �@ if(ADRES > 300 ) {
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
> return temp;} //�ǂݍ���temp��num�ɕԂ�
> }
����̎��ł����H
����̈Ӗ������Ƃ��Ă�
�u�����c�}�~�̈ʒu����30���ȏ�v�Ȃ������x�܂݂̈ʒu���m�F����A�Ƃ����R�[�h�Ɍ����܂��B
�����ɂ��̃R�[�h���������Ȃ̂ł��傤��?
> ��L���A�V���v����AD�ϊ��������ł����A���肵�Ă��銴������܂�
���́u��L�v�Ƃ́uif(ADRES > 500 ) {�v�̂��Ƃł����H
����͕ϊ����ʁ��܂݂̈ʒu�ɉ����ĂȂɂ������悤�Ƃ��Ă���̂ł͂Ȃ��̂ł����H
�u�ϊ��������v���u����v���ǂ��ɂ��v�f���̂�����܂��ǁB
�܂��A����ȍ~���������������̂������ς����܂���B
> �u���āA500��2�i���ɕϊ����āA���̏��8�r�b�g�≺��2�r�b�g�����߂�͖̂ʓ|�ł��̂ŁA�y�ȕ��@�Ńv���O�������������Ƃɂ��܂��傤�B�v
�Ȃ�����Ȍ��t�������ŏo�Ă����̂ł��傤���H
> ���́A���쑬�x��1MHz�ɂ���A1�ʂ��@�ő��1000�ʂ��̊W�����邩��A
> 50����500�Əo����Ǝv���܂���
�����10�r�b�g���ő�1023�̕���\��PWM�Ȃ̂ŁA50���͖�500�ł��B���쑬�x�Ƃ͊W����܂���B
�NjL���܂��B
���C�Â��܂������ǁANo.1387��
> if(RB7==0){__delay_ms(10);break;}
> LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
�́A
RB7��L���x���Ȃ�ċN���B
(����ȊO�Ȃ�A)RA0�s����RA1�s����HIGH�ɂ���B
�Ƃ����Ӗ������ł����ǁA����ł����̂ł��傤���H
�ҋ����b�N 2018/12/29(Sat) 20:56 No.1393 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
 �s�q����C�ҋ����b�N����C�����́B
�s�q����C�ҋ����b�N����C�����́B�v���O�����̕��́C�������Ȃ��悤�ɁC�����T���܂��B
�v���O�����ł͂Ȃ��̂ł����C�ȑO�C�`�c�b�̃{�����[����
������ڂ�����̂ɁC�I�V���[�^�[�̐���ŁC����]�̃|�e���V�����[�^�[���g�������Ƃ���܂��B
����C�ǂ��Ȃ�ł��傤�ˁB
�ʏ�̃{�����[�����C���m�Ȑ��l�ɂȂ�悤�ȋC�����܂����B
mabo 2018/12/29(Sat) 21:03 No.1394 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
>�@MABO����
�����g�������͂���܂���B����Ɖ�]���\���t���̃c�}�~�ł��ˁB
�d���Ƃ��Ă͈��肵�Ă��܂���ˁB����ɍׂ������䂪�o���܂��B
����ǂ�����]������͎̂g���ɂ���������܂��ˁB
�������������̂ƃg���[�h�I�t�ł��B
���̏ꍇ�͊m���A�C���o�[�^�̊O���c�}�~�Ƃ��Ďg���܂����B
���Ă������A���X���ꂪ�t���Ă����̂ł����ǁA�}�V�������q�������Ȃ��đg�ݒ�������ł��B
�ŁA��͂�O�ɕt���Ă������̃^�C�v�̃{�����[�����ǂ��ƌ������Ŏg���܂����B
�����Ƃ��A����̌��̓{�����[���̐��\�Ƃ͂��܂�W�������Ǝv���Ă��܂��B
�u�s����v�̌������{�����[���̓ǂݎ��Ȃ̂��A�v���O�����̖��Ȃ̂��A�o�͐�̖��Ȃ̂��s���ł��B
�{�����[���̓ǂݎ�肪�s����ƌ������������Ă���A���̑Ώ��������ł����ǂˁB
�����g�������͂���܂���B����Ɖ�]���\���t���̃c�}�~�ł��ˁB
�d���Ƃ��Ă͈��肵�Ă��܂���ˁB����ɍׂ������䂪�o���܂��B
����ǂ�����]������͎̂g���ɂ���������܂��ˁB
�������������̂ƃg���[�h�I�t�ł��B
���̏ꍇ�͊m���A�C���o�[�^�̊O���c�}�~�Ƃ��Ďg���܂����B
���Ă������A���X���ꂪ�t���Ă����̂ł����ǁA�}�V�������q�������Ȃ��đg�ݒ�������ł��B
�ŁA��͂�O�ɕt���Ă������̃^�C�v�̃{�����[�����ǂ��ƌ������Ŏg���܂����B
�����Ƃ��A����̌��̓{�����[���̐��\�Ƃ͂��܂�W�������Ǝv���Ă��܂��B
�u�s����v�̌������{�����[���̓ǂݎ��Ȃ̂��A�v���O�����̖��Ȃ̂��A�o�͐�̖��Ȃ̂��s���ł��B
�{�����[���̓ǂݎ�肪�s����ƌ������������Ă���A���̑Ώ��������ł����ǂˁB
�ҋ����b�N 2018/12/29(Sat) 21:38 No.1395 PWM/AD�����[���@�S�ăv���O����
>�����o���̎߂̕����ł����H
�s����ȕ����́A�X�^�[�g���n�߂邠����ł����B
�����������Ă���̂��A�܂����������̂��͗ǂ�����܂���B
���������y�[�W�����Ă��������B���̕��������Ǝv���܂��B
����Ƃ��A���Ă��������������ŕ����Ă���̂��ȁ`�B
�����������_�͂��ׂČ����܂����B����ȏ�̐����͂ł��܂���B
�Ȃ̂ŁA�Љ���y�[�W�����Ă������������������Ǝv���܂��B
�\����Ȃ��ł��B
> �@ if(ADRES > 300 ) {
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
> return temp;} //�ǂݍ���temp��num�ɕԂ�
> }
�Љ���y�[�W�ɁA���Ńv���O�����������Ă��܂��B
�������������Ƃ����܂��B
���̏ꍇ�́AADRES�̒l���R�O���ȏゾ������A�ǂݍ��ނƗ������܂����B
�ԈႦ��������܂����B
�ł��A������ɓ����Ă��܂��B
�Ⴕ���Ă��Ȃ��悤�ł�����A���Ă��������B
�ق������ɂ́A����ȏ�A�ҋ����b�N����̂悤�ȃ��x���̍����l�ɂ͂��܂������ł��܂���B
��RB7��L���x���Ȃ�ċN���B
(����ȊO�Ȃ�A)RA0�s����RA1�s����HIGH�ɂ���B
�Ƃ����Ӗ������ł����ǁA����ł����̂ł��傤���H
�ċN���Ƃ����\�����������̂��ǂ����킩��܂���B
�����A�����Ƃ��ẮA
SEC�����̐M����PIC�̓��삪��̂ƂȂ������ȂƎv���܂����B
���̌��ʂ��A
> if(RB7==0){__delay_ms(10);break;}
> LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
����ł��B
���ہARB7�ɁA�M�����Ȃ���A�~�܂邵�A�M��������A���삵�܂��B
���܂ł�LED��SW�̊W�̃v���O����������܂�����ˁB
����ƁA�ҋ����b�N����ɋ������break���A������~�b�N�X
������ǂ����낤���Ǝv��������ł��B
���̂Ƃ���ARB7��PWM�ARA0�ARA1�͑S�ē������Ă��܂��B
�s����ȕ����́A�X�^�[�g���n�߂邠����ł����B
�����������Ă���̂��A�܂����������̂��͗ǂ�����܂���B
���������y�[�W�����Ă��������B���̕��������Ǝv���܂��B
����Ƃ��A���Ă��������������ŕ����Ă���̂��ȁ`�B
�����������_�͂��ׂČ����܂����B����ȏ�̐����͂ł��܂���B
�Ȃ̂ŁA�Љ���y�[�W�����Ă������������������Ǝv���܂��B
�\����Ȃ��ł��B
> �@ if(ADRES > 300 ) {
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
> return temp;} //�ǂݍ���temp��num�ɕԂ�
> }
�Љ���y�[�W�ɁA���Ńv���O�����������Ă��܂��B
�������������Ƃ����܂��B
���̏ꍇ�́AADRES�̒l���R�O���ȏゾ������A�ǂݍ��ނƗ������܂����B
�ԈႦ��������܂����B
�ł��A������ɓ����Ă��܂��B
�Ⴕ���Ă��Ȃ��悤�ł�����A���Ă��������B
�ق������ɂ́A����ȏ�A�ҋ����b�N����̂悤�ȃ��x���̍����l�ɂ͂��܂������ł��܂���B
��RB7��L���x���Ȃ�ċN���B
(����ȊO�Ȃ�A)RA0�s����RA1�s����HIGH�ɂ���B
�Ƃ����Ӗ������ł����ǁA����ł����̂ł��傤���H
�ċN���Ƃ����\�����������̂��ǂ����킩��܂���B
�����A�����Ƃ��ẮA
SEC�����̐M����PIC�̓��삪��̂ƂȂ������ȂƎv���܂����B
���̌��ʂ��A
> if(RB7==0){__delay_ms(10);break;}
> LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
����ł��B
���ہARB7�ɁA�M�����Ȃ���A�~�܂邵�A�M��������A���삵�܂��B
���܂ł�LED��SW�̊W�̃v���O����������܂�����ˁB
����ƁA�ҋ����b�N����ɋ������break���A������~�b�N�X
������ǂ����낤���Ǝv��������ł��B
���̂Ƃ���ARB7��PWM�ARA0�ARA1�͑S�ē������Ă��܂��B
TR 2018/12/29(Sat) 22:03 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
mabo�����́B
����AVR���l���܂����B
�莝���ɓ����R�X���X�̂����z���������̂ŁA���ݎ��쒆�̃{�[�h�Ɏg���Ă݂܂����B
�ł��A�v������ł��B
MOSFET�̏ꍇ�A�d������Ȃ�ł���ˁB
�Ȃ̂ŁA�v���O�����ŁASW��������āA
FET��Vgs�ł��������A
���ׂ�ƁA1�`�QV�ł����B
���݂́A�ڕW�QV�ɂ��܂����B
���Ƃ͎��@�ɂ��āA���������܂��B
����ŁA�����[���v��Ȃ����ASW����̃t�H�g�J�v���[���v��Ȃ��B
����ƁA����Ƃ킩������ł����A
SEC���OUTPUT�ɂ́A�M����GND���Z�b�g�ɂȂ��Ă��܂��B
����́A���ځA�����[�Ȃǂ𑀍삷�邽�߂ɁA�M������GND���Z�b�g�ɂȂ��Ă�����ł��ˁB
����́ASEC��̒[�q����́A�M����������RB7�Ɍq���܂��B�@���̕ӁA�}�ʂ�����Ă��܂����B
�ܘ_�A�d���́A�S�Ĉꏏ�B�X���[�X�X�e�b�p�[�ASEC��A����̃{�[�h�͂��ׂē����d���ł��B
����AVR���l���܂����B
�莝���ɓ����R�X���X�̂����z���������̂ŁA���ݎ��쒆�̃{�[�h�Ɏg���Ă݂܂����B
�ł��A�v������ł��B
MOSFET�̏ꍇ�A�d������Ȃ�ł���ˁB
�Ȃ̂ŁA�v���O�����ŁASW��������āA
FET��Vgs�ł��������A
���ׂ�ƁA1�`�QV�ł����B
���݂́A�ڕW�QV�ɂ��܂����B
���Ƃ͎��@�ɂ��āA���������܂��B
����ŁA�����[���v��Ȃ����ASW����̃t�H�g�J�v���[���v��Ȃ��B
����ƁA����Ƃ킩������ł����A
SEC���OUTPUT�ɂ́A�M����GND���Z�b�g�ɂȂ��Ă��܂��B
����́A���ځA�����[�Ȃǂ𑀍삷�邽�߂ɁA�M������GND���Z�b�g�ɂȂ��Ă�����ł��ˁB
����́ASEC��̒[�q����́A�M����������RB7�Ɍq���܂��B�@���̕ӁA�}�ʂ�����Ă��܂����B
�ܘ_�A�d���́A�S�Ĉꏏ�B�X���[�X�X�e�b�p�[�ASEC��A����̃{�[�h�͂��ׂē����d���ł��B
TR 2018/12/29(Sat) 22:21 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
> �s����ȕ����́A�X�^�[�g���n�߂邠����ł����B
�Ƃ����͎̂߂̕����ƌ������ł���?����ł͖����āH
> ���������y�[�W�����Ă��������B���̕��������Ǝv���܂��B
�ܘ_�A�����̃y�[�W�����Ă��܂���B
�ŁA�ʂɂ��̃y�[�W�ł�%�ł͏����Ă���܂����B
���Ă������A�P��1023��23�̕������̂ĂĒP���ɍl�������A�Ƃ����Ӗ��ł����H
> �@ if(ADRES > 300 ) {
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
> return temp;} //�ǂݍ���temp��num�ɕԂ�
> }
���̃v���O�������������A
> �@ if(ADRES > 300 ) {
�u����ADRES��300���傫����A�v�ƌ������ł��B
ADRES���W�X�^�����݂�������ǂݍ��݂܂��B
���W�X�^��������A�����ō�����ϐ��ł��傤����A�O��ADC��ǂl���Ǝv���܂��B
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
2�s�ŁA�V����ADC�̒l10bit��temp�ɑ�����Ă��܂��B
> return temp;} //�ǂݍ���temp��num�ɕԂ�
���͂����ł��B����ADC�l�����^�[�����āu�����I��点�܂��B�v�Ȃ̂ŁA�ǂ��ł��̃R�[�h���g���̂����C�ɂȂ����̂ł��B
���ʂɍl����AADC�̓ǂݎ����̕����ɏ�����Ă���̂��Ǝv���܂����ǁA���������Ă����ł��ċN�������Ă��܂��H
�ŁA�����̍�����ϐ��Ȃ�A��x300�ȉ��ɂȂ�����X�V����Ȃ��悤�ȋC������̂ł����ǁH
������ƑS�̂̃R�[�h�����Ȃ��Ɣ��f���t���܂���B
�Ⴆ�A���̃R�[�h�ŁA__delay_ms(10);�̕�����10000(10�b)�ɂ���Ƃǂ��Ȃ�܂����H
�܂�A10�b�����ɍX�V���܂�����A����ł���10�b�Ԃ����肵�Ȃ��Ȃ�n�[�h�̖��ł��B�������o���̗͂��シ����
���[�^����邩�~�܂邩�����肵�Ȃ��̂ł��傤�B����������̐��l����s�������Ǝv���܂��B
����ŁA���肵�Ă���̂Ȃ�AADC�̎擾�l�����ƌ������ł��傤�B
> MOSFET�̏ꍇ�A�d������Ȃ�ł���ˁB
> �Ȃ̂ŁA�v���O�����ŁASW��������āA
> FET��Vgs�ł��������A
> ���ׂ�ƁA1�`�QV�ł����B
> ���݂́A�ڕW�QV�ɂ��܂����B
������Ɨǂ�����Ȃ��̂ł����ǁA�uSW�v�Ƃ͉��̈Ӗ��ł��傤���H
Vgs�̓Q�[�g�ɓ����d���̎��ł��B1�`�QV�Ƃ́H�܂��A�u�ڕW�v�����̂��Ƃ������Ă���̂ł����H
���������������ɏ����Ă��������B�uSW��������āA�v�͂ǂ��Ɍq����̂ł����H
�u�����v�u�ǂ��������v�Ƃ��������������ł��܂���B
> ���ځA�����[�Ȃǂ𑀍삷�邽�߂ɁA�M������GND���Z�b�g�ɂȂ��Ă�����ł��ˁB
���ڃ����[���쓮�ł��邩�͕ʖ��ł��BGND�͕K���K�v�ł��B�łȂ��ƐM�����̓d��������܂���B
�d���v�i�e�X�^�[�j��2�{����܂���ˁH����Ɠ����ł��B1�{���q���ł��d���͑���܂���B
���Ƃ͂��̏o�͂ɂǂ̈ʂ̋쓮�\�͂����邩�ł��B�{���̐M���݂̂Ȃ̂��ALED���x�͋쓮�ł���̂��A�����[���\�Ȃ̂��H
�����A���ʂ�IC�̏o�͒[�q���q���ł���̂�LED���x�܂łł��B�g�����W�X�^�A���C�����肪�q�����Ă�������[�����v�ł��B
��SEC���X���[�X�X�e�b�p�[�̎��͂��Ȃ�Y��Ă��܂��BTR����̃|���v�������H�̕��͂�������Y��Ă��܂��B
�Ƃ����͎̂߂̕����ƌ������ł���?����ł͖����āH
> ���������y�[�W�����Ă��������B���̕��������Ǝv���܂��B
�ܘ_�A�����̃y�[�W�����Ă��܂���B
�ŁA�ʂɂ��̃y�[�W�ł�%�ł͏����Ă���܂����B
���Ă������A�P��1023��23�̕������̂ĂĒP���ɍl�������A�Ƃ����Ӗ��ł����H
> �@ if(ADRES > 300 ) {
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
> return temp;} //�ǂݍ���temp��num�ɕԂ�
> }
���̃v���O�������������A
> �@ if(ADRES > 300 ) {
�u����ADRES��300���傫����A�v�ƌ������ł��B
ADRES���W�X�^�����݂�������ǂݍ��݂܂��B
���W�X�^��������A�����ō�����ϐ��ł��傤����A�O��ADC��ǂl���Ǝv���܂��B
> temp = ADRESH; //���8bit
> temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
2�s�ŁA�V����ADC�̒l10bit��temp�ɑ�����Ă��܂��B
> return temp;} //�ǂݍ���temp��num�ɕԂ�
���͂����ł��B����ADC�l�����^�[�����āu�����I��点�܂��B�v�Ȃ̂ŁA�ǂ��ł��̃R�[�h���g���̂����C�ɂȂ����̂ł��B
���ʂɍl����AADC�̓ǂݎ����̕����ɏ�����Ă���̂��Ǝv���܂����ǁA���������Ă����ł��ċN�������Ă��܂��H
�ŁA�����̍�����ϐ��Ȃ�A��x300�ȉ��ɂȂ�����X�V����Ȃ��悤�ȋC������̂ł����ǁH
������ƑS�̂̃R�[�h�����Ȃ��Ɣ��f���t���܂���B
�Ⴆ�A���̃R�[�h�ŁA__delay_ms(10);�̕�����10000(10�b)�ɂ���Ƃǂ��Ȃ�܂����H
�܂�A10�b�����ɍX�V���܂�����A����ł���10�b�Ԃ����肵�Ȃ��Ȃ�n�[�h�̖��ł��B�������o���̗͂��シ����
���[�^����邩�~�܂邩�����肵�Ȃ��̂ł��傤�B����������̐��l����s�������Ǝv���܂��B
����ŁA���肵�Ă���̂Ȃ�AADC�̎擾�l�����ƌ������ł��傤�B
> MOSFET�̏ꍇ�A�d������Ȃ�ł���ˁB
> �Ȃ̂ŁA�v���O�����ŁASW��������āA
> FET��Vgs�ł��������A
> ���ׂ�ƁA1�`�QV�ł����B
> ���݂́A�ڕW�QV�ɂ��܂����B
������Ɨǂ�����Ȃ��̂ł����ǁA�uSW�v�Ƃ͉��̈Ӗ��ł��傤���H
Vgs�̓Q�[�g�ɓ����d���̎��ł��B1�`�QV�Ƃ́H�܂��A�u�ڕW�v�����̂��Ƃ������Ă���̂ł����H
���������������ɏ����Ă��������B�uSW��������āA�v�͂ǂ��Ɍq����̂ł����H
�u�����v�u�ǂ��������v�Ƃ��������������ł��܂���B
> ���ځA�����[�Ȃǂ𑀍삷�邽�߂ɁA�M������GND���Z�b�g�ɂȂ��Ă�����ł��ˁB
���ڃ����[���쓮�ł��邩�͕ʖ��ł��BGND�͕K���K�v�ł��B�łȂ��ƐM�����̓d��������܂���B
�d���v�i�e�X�^�[�j��2�{����܂���ˁH����Ɠ����ł��B1�{���q���ł��d���͑���܂���B
���Ƃ͂��̏o�͂ɂǂ̈ʂ̋쓮�\�͂����邩�ł��B�{���̐M���݂̂Ȃ̂��ALED���x�͋쓮�ł���̂��A�����[���\�Ȃ̂��H
�����A���ʂ�IC�̏o�͒[�q���q���ł���̂�LED���x�܂łł��B�g�����W�X�^�A���C�����肪�q�����Ă�������[�����v�ł��B
��SEC���X���[�X�X�e�b�p�[�̎��͂��Ȃ�Y��Ă��܂��BTR����̃|���v�������H�̕��͂�������Y��Ă��܂��B
�ҋ����b�N 2018/12/29(Sat) 23:11 No.1398 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
�����ŏ����Ă��������e�ł��B
ADC�̃v���O�����ł́A10�r�b�g�@�O�`�P�O�Q�R�ł���ˁB
ADRES�̔�������̂悤�ɋL�ڂ��Ă���܂����B
��
// (AD�R���o�[�g�l��250�����̏ꍇ)
if( ADRES < 250 ) {
�ꕔ����
// (AD�R���o�[�g�l��250�����̏ꍇ)
if( ADRES < 250 ) {
timerValue--; // �^�C�}�[���Ԃ����炷
// �^�C�}�[���Ԃ�LED�̓_�ʼnŕ\������
RA5 = 0; // ��������LED��������
__delay_ms(500);
// �ݒ莞�ԕ�LED��_�ł��āA
for(i=0; i<timerValue; i++) {
RA5 = 0;
__delay_ms(200);
RA5 = 1;
__delay_ms(200);
}
RA5 = 0; // ������Ƃ̊�LED�������āA
__delay_ms(800);
RA5 = 1; // LED��_������
} else {
// �^�C�}�[���Ԃ𑝂₷�X�C�b�`�̏���
// (AD�R���o�[�g�l��250�ȏ�750����)
if( 250 <= ADRES && ADRES < 750 ) {
timerValue++;// �^�C�}�[���Ԃ𑝂₷
// �^�C�}�[���Ԃ�LED�̓_�ʼnŕ\������
// �_�Ő�����@�͌��炷�ꍇ�Ɠ���
RA5 = 0;
__delay_ms(800);
for(i=0; i<timerValue; i++) {
RA5 = 0;
__delay_ms(200);
RA5 = 1;
__delay_ms(200);
}
RA5 = 0;
__delay_ms(800);
RA5 = 1;
}
}
��̂悤��ADRES��1023�̓��A�O�`�Q�T�O�Ƃ��Ă��܂��B
�Ȃ̂ŁA������
if(ADRES > 400 ) {//�{�����[��40��=400/1000�ʂ�
�Ƃ������ǁA
//�{�����[��40��=400/1000�ʂ��@�������́A
400/1023���ȁB
�ł��A5V����ƃX���b�V�����h�d��2V���l�����ꍇ
2/5V�~1023����400�ƂȂ邩��A
���ɁA��̂悤�Ȏg�������ł���̂ł���A
if(ADRES > 400 ) {//2/5V�~1023����400
�ł����悤�ȁB
�����W�X�^��������A�����ō�����ϐ��ł��傤����
�����ō��Ƃ́A�ϐ��錾�����邱�Ƃł����H
���Ƃ���A�ϐ��錾�����Ă��܂���̂ŁA�����ł͍���Ă��܂����B
�����ڃ����[���쓮�ł��邩�͕ʖ��ł��BGND�͕K���K�v�ł��B�łȂ��ƐM�����̓d��������܂���B
�d���v�i�e�X�^�[�j��2�{����܂���ˁH����Ɠ����ł��B1�{���q���ł��d���͑���܂���B
���Ƃ͂��̏o�͂ɂǂ̈ʂ̋쓮�\�͂����邩�ł��B�{���̐M���݂̂Ȃ̂��ALED���x�͋쓮�ł���̂��A�����[���\�Ȃ̂��H
�����A���ʂ�IC�̏o�͒[�q���q���ł���̂�LED���x�܂łł��B�g�����W�X�^�A���C�����肪�q�����Ă�������[�����v�ł��B
��SEC���X���[�X�X�e�b�p�[�̎��͂��Ȃ�Y��Ă��܂��BTR����̃|���v�������H�̕��͂�������Y��Ă��܂��B
�������������ݓ������b�ɂȂ�ƁA��͂�A����������Ȃ��悤�ɁASEC����̈ȉ��̃y�[�W�����Ă��������������ǂ��Ǝv���܂��B
http://sec-suzuki.com/PALA-CNC-V2.pdf
���Ƃ̎��͂����Ǝ��Ԃ������肻���ł��B
�Ȃɂ��A�����������ׂăv���O��������ׂ���Ԃł�����B
����ȏ�́A��������������ɂȂ肻���ł��B
ADC�̃v���O�����ł́A10�r�b�g�@�O�`�P�O�Q�R�ł���ˁB
ADRES�̔�������̂悤�ɋL�ڂ��Ă���܂����B
��
// (AD�R���o�[�g�l��250�����̏ꍇ)
if( ADRES < 250 ) {
�ꕔ����
// (AD�R���o�[�g�l��250�����̏ꍇ)
if( ADRES < 250 ) {
timerValue--; // �^�C�}�[���Ԃ����炷
// �^�C�}�[���Ԃ�LED�̓_�ʼnŕ\������
RA5 = 0; // ��������LED��������
__delay_ms(500);
// �ݒ莞�ԕ�LED��_�ł��āA
for(i=0; i<timerValue; i++) {
RA5 = 0;
__delay_ms(200);
RA5 = 1;
__delay_ms(200);
}
RA5 = 0; // ������Ƃ̊�LED�������āA
__delay_ms(800);
RA5 = 1; // LED��_������
} else {
// �^�C�}�[���Ԃ𑝂₷�X�C�b�`�̏���
// (AD�R���o�[�g�l��250�ȏ�750����)
if( 250 <= ADRES && ADRES < 750 ) {
timerValue++;// �^�C�}�[���Ԃ𑝂₷
// �^�C�}�[���Ԃ�LED�̓_�ʼnŕ\������
// �_�Ő�����@�͌��炷�ꍇ�Ɠ���
RA5 = 0;
__delay_ms(800);
for(i=0; i<timerValue; i++) {
RA5 = 0;
__delay_ms(200);
RA5 = 1;
__delay_ms(200);
}
RA5 = 0;
__delay_ms(800);
RA5 = 1;
}
}
��̂悤��ADRES��1023�̓��A�O�`�Q�T�O�Ƃ��Ă��܂��B
�Ȃ̂ŁA������
if(ADRES > 400 ) {//�{�����[��40��=400/1000�ʂ�
�Ƃ������ǁA
//�{�����[��40��=400/1000�ʂ��@�������́A
400/1023���ȁB
�ł��A5V����ƃX���b�V�����h�d��2V���l�����ꍇ
2/5V�~1023����400�ƂȂ邩��A
���ɁA��̂悤�Ȏg�������ł���̂ł���A
if(ADRES > 400 ) {//2/5V�~1023����400
�ł����悤�ȁB
�����W�X�^��������A�����ō�����ϐ��ł��傤����
�����ō��Ƃ́A�ϐ��錾�����邱�Ƃł����H
���Ƃ���A�ϐ��錾�����Ă��܂���̂ŁA�����ł͍���Ă��܂����B
�����ڃ����[���쓮�ł��邩�͕ʖ��ł��BGND�͕K���K�v�ł��B�łȂ��ƐM�����̓d��������܂���B
�d���v�i�e�X�^�[�j��2�{����܂���ˁH����Ɠ����ł��B1�{���q���ł��d���͑���܂���B
���Ƃ͂��̏o�͂ɂǂ̈ʂ̋쓮�\�͂����邩�ł��B�{���̐M���݂̂Ȃ̂��ALED���x�͋쓮�ł���̂��A�����[���\�Ȃ̂��H
�����A���ʂ�IC�̏o�͒[�q���q���ł���̂�LED���x�܂łł��B�g�����W�X�^�A���C�����肪�q�����Ă�������[�����v�ł��B
��SEC���X���[�X�X�e�b�p�[�̎��͂��Ȃ�Y��Ă��܂��BTR����̃|���v�������H�̕��͂�������Y��Ă��܂��B
�������������ݓ������b�ɂȂ�ƁA��͂�A����������Ȃ��悤�ɁASEC����̈ȉ��̃y�[�W�����Ă��������������ǂ��Ǝv���܂��B
http://sec-suzuki.com/PALA-CNC-V2.pdf
���Ƃ̎��͂����Ǝ��Ԃ������肻���ł��B
�Ȃɂ��A�����������ׂăv���O��������ׂ���Ԃł�����B
����ȏ�́A��������������ɂȂ肻���ł��B
TR 2018/12/30(Sun) 06:47 Re: PWM/AD�����[����
������ƌ������Ă݂��̂ł����ǁA����͈Ⴄ�y�[�W�̕��ł��ˁB
�������A�v���O�����Ƃ��ẮA�ő�l1023�̂Ȃ��ŁA臒l�Ƃ���250��750���g���Ă���A
�Ƃ��������ł��B
���̃v���O������if(num==50)��臒l��50�ɂ��Ă���̂Ɖ����ς��܂���B
�����āA��͂聓�ł͂���܂���B
����͒P��TR���ȒP�ɗ������悤�ƒu�������������ł��傤�B
> �ϐ��錾�����Ă��܂���̂ŁA�����ł͍���Ă��܂����B
�ƂȂ�ƃ��W�X�^���Q�Ƃ��Ă���̂ł��ˁB
�ŁA��ƂȂ����BNo.1380 ��ADC�ǂݎ���adconv�����̂������Ă������̂ł��ˁB
�Ŋ���}�܂ŏ����Ă���܂���B�Ō�ɕt����������
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
if(ADRES > 300 ) {
temp = ADRESH; //���8bit
temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
return temp;
} //�ǂ�
}
�Ȃ̂��Ǝv���܂����ǁA����͂��܂�ǂ�����܂���B
���̂悤�ɂ��ׂ��ł��B
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
if(ADRES > 300 ) return ADRES;
else return 0;
}
�܂��Aif(ADRES > 300 )�̕����ł����ǁA
ADRES���̂��R���p�C�����A
ADRES=(ADRESH<<8)+ADRESL;
�Ƃ��āA�����Œl���擾���Ă���Ă��܂��B�Ȃ̂ŁA������x�����l���擾�������K�v�͂���܂���B
�ŁA�����Əd�v�Ȏ��͂���ȊO�̏ꍇ��0��Ԃ�(return 0;)�A�ƌ������ł��B
�������Ԃ��Ȃ��̂́A�Ԃ��l�����ł��ǂ��ꍇ�݂̂ɂ��ĉ������B�u�����Ȃ��ꍇ��0��Ԃ��v�ƌ������ł͂���܂���B
����ƁA�O�ɂ��������Ǝv���܂����ǁA�����������g���܂킷�悤�Ȋ���M��̂͂��܂�ǂ�����܂���B
�܂�A�����ŘM���Ă���̂ł܂݂̈ʒu����30���܂ł����������Ȃ��Ă��܂��B
�Ȃ̂ŁA�����ł́A
�@
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
�Ƃ��āA���C�����̃��[�v�̕��ŁA
num=adconv();//adc��ǂݍ����
if(num<=300)num=0;//300�ȉ��Ȃ�0�ɂ���B
�Ƃ��������ԈႢ�������Ȃ�܂��B
�ŁA���̃v���O�����ł͏�L�̇@�ŁA�X�g���[�g��ADC�̒l���擾������ŁA
num=adconv();//adc��ǂݍ����
num=(num-50.0)*(1023-500)/(1023-50)+500;//�ϊ���
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
�ł��B
SEC��̏o�͒i��74HC540�Ȃ̂ŁA���ڐ���Ȃ�LED���x�ł���B
�������A�v���O�����Ƃ��ẮA�ő�l1023�̂Ȃ��ŁA臒l�Ƃ���250��750���g���Ă���A
�Ƃ��������ł��B
���̃v���O������if(num==50)��臒l��50�ɂ��Ă���̂Ɖ����ς��܂���B
�����āA��͂聓�ł͂���܂���B
����͒P��TR���ȒP�ɗ������悤�ƒu�������������ł��傤�B
> �ϐ��錾�����Ă��܂���̂ŁA�����ł͍���Ă��܂����B
�ƂȂ�ƃ��W�X�^���Q�Ƃ��Ă���̂ł��ˁB
�ŁA��ƂȂ����BNo.1380 ��ADC�ǂݎ���adconv�����̂������Ă������̂ł��ˁB
�Ŋ���}�܂ŏ����Ă���܂���B�Ō�ɕt����������
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
if(ADRES > 300 ) {
temp = ADRESH; //���8bit
temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
return temp;
} //�ǂ�
}
�Ȃ̂��Ǝv���܂����ǁA����͂��܂�ǂ�����܂���B
���̂悤�ɂ��ׂ��ł��B
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
if(ADRES > 300 ) return ADRES;
else return 0;
}
�܂��Aif(ADRES > 300 )�̕����ł����ǁA
ADRES���̂��R���p�C�����A
ADRES=(ADRESH<<8)+ADRESL;
�Ƃ��āA�����Œl���擾���Ă���Ă��܂��B�Ȃ̂ŁA������x�����l���擾�������K�v�͂���܂���B
�ŁA�����Əd�v�Ȏ��͂���ȊO�̏ꍇ��0��Ԃ�(return 0;)�A�ƌ������ł��B
�������Ԃ��Ȃ��̂́A�Ԃ��l�����ł��ǂ��ꍇ�݂̂ɂ��ĉ������B�u�����Ȃ��ꍇ��0��Ԃ��v�ƌ������ł͂���܂���B
����ƁA�O�ɂ��������Ǝv���܂����ǁA�����������g���܂킷�悤�Ȋ���M��̂͂��܂�ǂ�����܂���B
�܂�A�����ŘM���Ă���̂ł܂݂̈ʒu����30���܂ł����������Ȃ��Ă��܂��B
�Ȃ̂ŁA�����ł́A
�@
unsigned int adconv() {
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
return ADRES;
}
�Ƃ��āA���C�����̃��[�v�̕��ŁA
num=adconv();//adc��ǂݍ����
if(num<=300)num=0;//300�ȉ��Ȃ�0�ɂ���B
�Ƃ��������ԈႢ�������Ȃ�܂��B
�ŁA���̃v���O�����ł͏�L�̇@�ŁA�X�g���[�g��ADC�̒l���擾������ŁA
num=adconv();//adc��ǂݍ����
num=(num-50.0)*(1023-500)/(1023-50)+500;//�ϊ���
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
�ł��B
SEC��̏o�͒i��74HC540�Ȃ̂ŁA���ڐ���Ȃ�LED���x�ł���B
�ҋ����b�N 2018/12/30(Sun) 12:37 No.1400 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
�ҋ����b�N����A���łɎ��@�Ɏ��t���܂����̂ŁA
�������������LjẮA����̎Q�l�ɂ������Ǝv���܂��B
����ŁA�F�X�Ə����Ă���̂ŁB
�S�ċL�ڂ��Ă��������B
���̂悤�Ȃ��̂ɂ́A�Ԉ���Ď�鋰�ꂪ���邩��ł��B
���̌��ł�������܂���B
PWM�̃y�[�W�ł��B�����Љ���y�[�W�ɂ���܂��B
�ŏ�������PWM�̕��ŁA���Ƃ��������ƍl���Ă��܂����̂ŁA�����܂����B
����ƁA�����ꌾ�A�����ɂ���������܂���B
����́A�u�O�ɂ������܂������v�Ƃ��������������x������̂́A�~�߂������ǂ��ł���B
�܂�Ől�̘b���Ă��Ȃ����낤�Ƃ�������ɕ������܂��B
�ҋ����b�N�������Ă������ł��Ȃ��ł�����A�������Ȃ������肵�ĖY��Ă��܂��Ƃ��A�F�X�Ƃ���܂��̂ŁB
���ɂ�����܂����A���̕ӂŎ��߂܂��B�Ƃ��������C�������Ă̍s���ł͂Ȃ��̂ł��B
�Ȃ̂ŁA���x��������ƋC�����ǂ��Ȃ��ł��B
�������������LjẮA����̎Q�l�ɂ������Ǝv���܂��B
����ŁA�F�X�Ə����Ă���̂ŁB
�S�ċL�ڂ��Ă��������B
���̂悤�Ȃ��̂ɂ́A�Ԉ���Ď�鋰�ꂪ���邩��ł��B
���̌��ł�������܂���B
PWM�̃y�[�W�ł��B�����Љ���y�[�W�ɂ���܂��B
�ŏ�������PWM�̕��ŁA���Ƃ��������ƍl���Ă��܂����̂ŁA�����܂����B
����ƁA�����ꌾ�A�����ɂ���������܂���B
����́A�u�O�ɂ������܂������v�Ƃ��������������x������̂́A�~�߂������ǂ��ł���B
�܂�Ől�̘b���Ă��Ȃ����낤�Ƃ�������ɕ������܂��B
�ҋ����b�N�������Ă������ł��Ȃ��ł�����A�������Ȃ������肵�ĖY��Ă��܂��Ƃ��A�F�X�Ƃ���܂��̂ŁB
���ɂ�����܂����A���̕ӂŎ��߂܂��B�Ƃ��������C�������Ă̍s���ł͂Ȃ��̂ł��B
�Ȃ̂ŁA���x��������ƋC�����ǂ��Ȃ��ł��B
TR 2018/12/30(Sun) 14:18 Re: PWM/AD�����[����
> TR�����
�����u���Ƃ͉��̂��Ƃ������Ă���̂�����Ȃ��v�Ƃ������̂ŁANo.1399�̗���ڂ����̂ł���ˁH
����������
�Eif( ADRES < 250 ) {
�Eif( 250 <= ADRES && ADRES < 750 ) {
��������w���Ă���̂��Ǝv�����̂ł����A臒l�A�܂�250��750�ӂ�̎��������Ă���̂��Ǝv���̂ł���
�Ⴄ�̂ł��傤���H
���m�ɂ́��Ƃ��������A�番���Ƃ݂Ȃ��čl���������ȒP�A�Ƃ������Ƃł���ˁH
�ŁA���l�Ƃ��Ă͐番���Ƃ���250�Ŕ�r���Ă��A���Ƃ��čl����250�Ŕ�r���Ă��A1023�܂ł���Ƃ���250�Ŕ�r���Ă�
����͌l�̓��̒��̖��ł��B����Ă��鎖��
if( ADRES < 250 )
��ADRES��250���r���Ă���Γ������ł��B
����
if(num<50){
�Ƃ��Ă���̂Ƃǂ��ɈႢ��������̂�������܂���B
> �S�ċL�ڂ��Ă��������B
���̂�������A�ǂ��̕����������Ă���̂��A�t�ɋL�ڂ��Ă��������B
���̒��ł́A�����������������ǂ��悤�ɐ������Ă���悤�Ɋ����Ă��܂��B
�t�ɁA�ǂ̕����������Ă���̂��A�͈͂��i����1������������������Ǝv���̂ł����ǁB
> ���̌��ł�������܂���B
> PWM�̃y�[�W�ł��B�����Љ���y�[�W�ɂ���܂��B
> �ŏ�������PWM�̕��ŁA���Ƃ��������ƍl���Ă��܂����̂ŁA�����܂����B
���̃y�[�W�̂ǂ̕���������̓I�Ɍ����Ă��������B
�u���̃y�[�W�ɂ���܂��v�u�����܂����v�ł͔���܂���B
�����悤�ȕ�����
> // 5% -> 100%�̐���
> for(duty=50; duty<=1000; duty++) {
������܂��B����̎��ł����H
�����duty���1000�܂łɂ��ď�̕�����23���̂ĂĊȒP�ɍl���Ă��܂��B
�ł��A����No.1398�ŁA
> �ŁA�ʂɂ��̃y�[�W�ł�%�ł͏����Ă���܂����B
> ���Ă������A�P��1023��23�̕������̂ĂĒP���ɍl�������A�Ƃ����Ӗ��ł����H
�ƕ����܂����B�ł������ł͖����悤�Ȋ�����No.1399�̃��X��Ԃ���܂����B
�Ȃ̂ŁA��̂ǂ̕����������Ă���̂��A�S���s���ł��B
<<�NjL>>
���ʁA���Ő���Ƃ����̂́A10�r�b�g�̏ꍇ��1023������Ȃ̂ŁA������100���ɂ�����܂��B�Ȃ̂ŁA
int percent_adc=ADRES*100.0/1023;
�̂悤�Ȃ��Ƃ����āA100�����ɒ����Ďg���܂��B
�Ȃ̂ŁA�ʓ|�ȂЂƎ�Ԃ�����܂��B
�ܘ_�APWM�ւ̏o�͂Ȃ�t��100(��)��1023�ϊ��ɂȂ�܂�
����́A�\����œ��o�͂����ŕ\���������ꍇ�ɂ悭�g�����@�ł��B
�����u���Ƃ͉��̂��Ƃ������Ă���̂�����Ȃ��v�Ƃ������̂ŁANo.1399�̗���ڂ����̂ł���ˁH
����������
�Eif( ADRES < 250 ) {
�Eif( 250 <= ADRES && ADRES < 750 ) {
��������w���Ă���̂��Ǝv�����̂ł����A臒l�A�܂�250��750�ӂ�̎��������Ă���̂��Ǝv���̂ł���
�Ⴄ�̂ł��傤���H
���m�ɂ́��Ƃ��������A�番���Ƃ݂Ȃ��čl���������ȒP�A�Ƃ������Ƃł���ˁH
�ŁA���l�Ƃ��Ă͐番���Ƃ���250�Ŕ�r���Ă��A���Ƃ��čl����250�Ŕ�r���Ă��A1023�܂ł���Ƃ���250�Ŕ�r���Ă�
����͌l�̓��̒��̖��ł��B����Ă��鎖��
if( ADRES < 250 )
��ADRES��250���r���Ă���Γ������ł��B
����
if(num<50){
�Ƃ��Ă���̂Ƃǂ��ɈႢ��������̂�������܂���B
> �S�ċL�ڂ��Ă��������B
���̂�������A�ǂ��̕����������Ă���̂��A�t�ɋL�ڂ��Ă��������B
���̒��ł́A�����������������ǂ��悤�ɐ������Ă���悤�Ɋ����Ă��܂��B
�t�ɁA�ǂ̕����������Ă���̂��A�͈͂��i����1������������������Ǝv���̂ł����ǁB
> ���̌��ł�������܂���B
> PWM�̃y�[�W�ł��B�����Љ���y�[�W�ɂ���܂��B
> �ŏ�������PWM�̕��ŁA���Ƃ��������ƍl���Ă��܂����̂ŁA�����܂����B
���̃y�[�W�̂ǂ̕���������̓I�Ɍ����Ă��������B
�u���̃y�[�W�ɂ���܂��v�u�����܂����v�ł͔���܂���B
�����悤�ȕ�����
> // 5% -> 100%�̐���
> for(duty=50; duty<=1000; duty++) {
������܂��B����̎��ł����H
�����duty���1000�܂łɂ��ď�̕�����23���̂ĂĊȒP�ɍl���Ă��܂��B
�ł��A����No.1398�ŁA
> �ŁA�ʂɂ��̃y�[�W�ł�%�ł͏����Ă���܂����B
> ���Ă������A�P��1023��23�̕������̂ĂĒP���ɍl�������A�Ƃ����Ӗ��ł����H
�ƕ����܂����B�ł������ł͖����悤�Ȋ�����No.1399�̃��X��Ԃ���܂����B
�Ȃ̂ŁA��̂ǂ̕����������Ă���̂��A�S���s���ł��B
<<�NjL>>
���ʁA���Ő���Ƃ����̂́A10�r�b�g�̏ꍇ��1023������Ȃ̂ŁA������100���ɂ�����܂��B�Ȃ̂ŁA
int percent_adc=ADRES*100.0/1023;
�̂悤�Ȃ��Ƃ����āA100�����ɒ����Ďg���܂��B
�Ȃ̂ŁA�ʓ|�ȂЂƎ�Ԃ�����܂��B
�ܘ_�APWM�ւ̏o�͂Ȃ�t��100(��)��1023�ϊ��ɂȂ�܂�
����́A�\����œ��o�͂����ŕ\���������ꍇ�ɂ悭�g�����@�ł��B
�ҋ����b�N 2018/12/30(Sun) 16:25 No.1402 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
���̘b��́A��U�~�߂ɂ��܂��傤�B
�{���̂��傢���^�]�ł́A���삵�܂����̂ŁA
����A�l�q�����܂��B
�{���̂��傢���^�]�ł́A���삵�܂����̂ŁA
����A�l�q�����܂��B
TR 2018/12/30(Sun) 17:00 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
���ꂪ�ǂ��ł��ˁB�N���ł���(^^)/
�ҋ����b�N 2018/12/30(Sun) 17:55 No.1404 Re: PWM/AD�����[�����@SW���Ȃ��S�ăv���O����
�ҋ����b�N����A�����́B
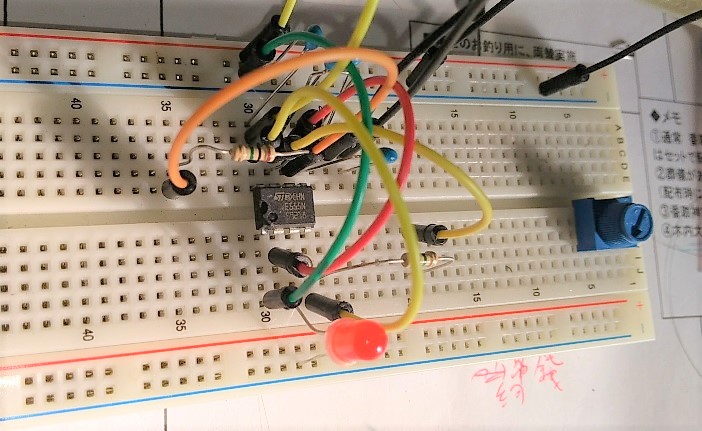
��قǁA�����������ǁA�撣���ăt���C�X�Ղ̕����ŁAPIC���������܂����B
�ҋ����b�N����̃v���O�����ł��B
���ʁ@OK�ł�����B
��قǁA�����������ǁA�撣���ăt���C�X�Ղ̕����ŁAPIC���������܂����B
�ҋ����b�N����̃v���O�����ł��B
���ʁ@OK�ł�����B
TR 2018/12/30(Sun) 20:34 �^����p,���ԕ�
 ��p�̌o�ߕł��B
��p�̌o�ߕł��B����̖��ɒ��ʂ��܂����B
���ށi�X���C�h�X�C�b�`�j��25�������\��Ȃ̂ŁA�ǂ���ɂ��Ă��܂��Ȃ̂ł����ǁA
�v���O������CAD�̕����͂����悻����āA�e�X�g���Ă��܂��B
�@��ԑ傫�Ȗ��ł����ǁA�uCTRL�v+�uALT�v+�uX�v���ʗp���܂���B
�@�����Ă݂�ƁA�uCTRL�v+�uX�v��uALT�v+�uX�v�Ȃ��薳�������ł��B
�@�iSTM32F103�{�[�h�APRO MICRO���ʁj
�@�ܘ_�A�{���̃L�[�{�[�h����́uCTRL�v+�uALT�v+�uX�v�Œʗp���܂��B
�@���̏��A�������3�ł��B
�@1.���{�I�ɁA�v���O�����i���C�u�����j���������āA�uCTRL�v+�uALT�v+���ʗp������̂����
�@2.�z�b�g�L�[�̊��蓖�Ă�ς���B
�@3.���܂ōs���Ă���JoyToKey�Ƃ����\�t�g���g���Ȃ�ʗp����ł��傤����A
�@�@�W���C�p�b�h�Ƃ��č���āAJoyToKey��ʂ��č�Ƃ���Ȃ���͂��蔲�������ł��B
�@���̏��A2�Ԃ̊��蓖�ĕύX�ɂȂ肻���ł��B�����A���X�ǂ��ɓ��Ă��Ă���̂����͂����肵�Ȃ���ł���ˁB
�@�ꗗ�Ƃ�������A�u����ȊO�v�����߂��̂ł����ǁB
�ASTM32F103�{�[�h�ɂ�BOOT�W�����p���t���Ă��܂��B����ŁA�N�����ւ���̂ł����ǁA
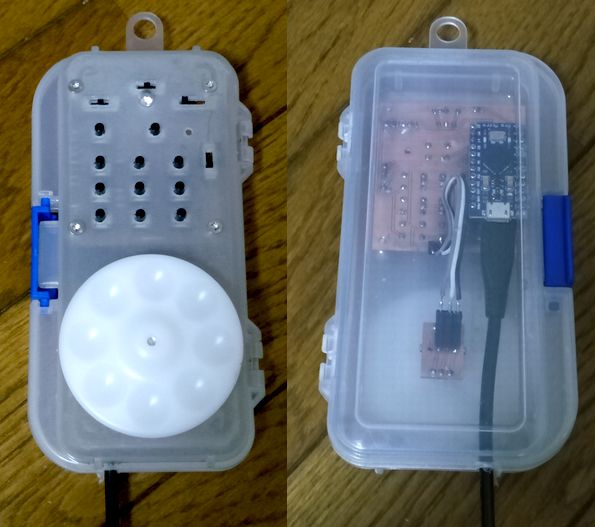
�@���ꂪ�ז��ŗ\��P�[�X�ɂ͓���Ȃ����Ƃ��������܂����B�s���w�b�_������Ă͂t�������Ⴄ���H�P�[�X��
�@���������邩�A����Ƃ��s���w�b�_�̖���PRO MICRO�ɂ��邩�H�܂��A�P�[�X��ς���A�Ƃ����̂�����܂����ˁB
�@�Y�t�摜�̂悤�ɁAPRO MICRO�͕���ł��B���Z�b�g�{�^����ISP�s�����o�ĂȂ��̂�����͍D���ʂɂȂ�܂��B
�@�i�ܘ_�����������g���₷���ł����ǁA���̕��ׂ��������݂�ƈӐ}�I�ɂ��Ă���悤�ł��ˁj
�@����͂������PRO MICRO�ɋC�������X���Ă��܂��B�W�����p������Ă�������Ɩc���ʂȂ�ł���ˁB
�B�ȑOMABO����A�u�t�H��������̋^����p�͎g���ɂ��������v�Ƃ����悤�Ȃ��Ƃ����悤�ȋC������̂ł����ǁA
�@����Ɠ����悤�ȗv���Ȃ̂��Ǝv���܂��B
�@CONT���[�h�̎��̓{�^���������ɐ�ւ��܂���B0.5�b�ʂ͗����Ȃ��Ǝ��̖��߁i�{�^���������j���Ă���܂���B
�@�ŏ��ɂ���ɑ��������̂Ō˘f���܂����B
�@(����̓L�[�{�[�h�ł��m�F�ł��܂��B���L�[�������Ăw+�����ɂ��������Ă��āA�����Ɂ��L�[�ɐ�ւ���Ƃw-�ɂ͓������ɒ�~���܂��B
�@�܂��A�����L�[��2�x�ł��ł���~���܂�)
�@
�@�������Astep���[�h�̏ꍇ��
> for (i = 0; i < 100; i++) {
> BootKeyboard.press(KEY_PAGE_UP);
> delay(3);
> BootKeyboard.release(KEY_PAGE_UP);
> delay(3);
> }
�@�̃R�[�h�œ������Ƃ��m�F���܂����B�i0.01mm�~100����1mm����j
�@�G���R�[�_���̂�1��30�p���X�Ȃ̂ŁA�����Ă�1�b�Ԃ�3��]��90�p���X/�b�ł��B
�@����œ������ƌ�������160�p���X/�b�ł����Ȃ����Ƃ��Ӗ����Ă���̂ŁASTEP���[�h�ɂ����
�@�����Ɠ��������ł��B
�ҋ����b�N 2018/12/23(Sun) 10:23 No.1363
Re: �^����p,���ԕ�
�ҋ����b�N����C�s�q����C�����́B
�ҋ����b�N����C���X�Ƃ����ł܂��ˁB
������Ƌ^��_�Ȃ�ł����C
�t�r�a�ڑ����Ǝv���̂ł����C
USB�܂��̃��C�u����[�ł�����̂ł��傤���B
����ƁC
BootKeyboard.press(KEY_PAGE_UP)
��KEY_PAGE_UP�́C�ҋ����b�N���ʓr������CDefine����
�̏����ł��傤���B
����Ƃ��C�ꊇ�ŁC�w�b�_�[�t�B�A�C������Ȃɂ���̂ł��傤���B
�ҋ����b�N����C���X�Ƃ����ł܂��ˁB
������Ƌ^��_�Ȃ�ł����C
�t�r�a�ڑ����Ǝv���̂ł����C
USB�܂��̃��C�u����[�ł�����̂ł��傤���B
����ƁC
BootKeyboard.press(KEY_PAGE_UP)
��KEY_PAGE_UP�́C�ҋ����b�N���ʓr������CDefine����
�̏����ł��傤���B
����Ƃ��C�ꊇ�ŁC�w�b�_�[�t�B�A�C������Ȃɂ���̂ł��傤���B
mabo 2018/12/23(Sun) 20:48 No.1364 Re: �^����p,���ԕ�
HID�f�o�C�X���݂̃��C�u�����ł��B
HID�f�o�C�X�Ȃ�A�W���h���C�o�œ����̂Ńh���C�o�����K�v������܂���B
�}�E�X�A�L�[�{�[�h�A�W���C�p�b�h������̃f�o�C�X�ł��B
�����O�ɎQ�l�v���O�������悹���Ǝv���̂ł����ǁB(No.1347�ł�)
STM32F103�{�[�h�̕��̓R���|�W�b�g���C�u�����i�����̕����j�ɂȂ��Ă��āA
���[�h���������̂Ŗʓ|�ł��B�ł���{�͈ꏏ�ŁA
#include <USBComposite.h>
USBHID HID;
HIDKeyboard BootKeyboard(HID, 0);
void setup() {
HID.begin(HID_BOOT_KEYBOARD);
BootKeyboard.begin();
�܂ŋL�q����A���Ɏn�߂鏀�����o���Ă��܂��B
���
BootKeyboard.press('M');
BootKeyboard.release('M');
BootKeyboard.write('M');//�����ė�������
BootKeyboard.releaseAll();
�̗ނ̖��߂��ɉ����ď��������ł��B
���uBootKeyboard�v�͎��R�ɕt���Ă����͂��ł��B�B
�Ȃ̂�3�s�ڂ�
HIDKeyboard TEPA(HID, 0);
�Ƃ���A6�s�ڂ�
TEPA.begin();
�Ƃ��āA
TEPA.press('k');
�̂悤�Ɏg���܂��B
PRO MICRO�͒P�Ƃ�HID�L�[�{�[�h���C�u�����̂Ȃ̂ŁA�����ƊȒP��
#include "Keyboard.h"
void setup() {
Keyboard.begin();
}
��2�s��t����邾���ŏ���OK�ł��B
KEY_PAGE_UP
���͊��ɒ�`����Ă��܂��B
�܂Ƃ��ȃ}�j���A���͂���܂���A���C�u���������������āA���ۂɂ�USBHID.h�Ƃ����t�@�C���ɒ�`����Ă��܂����B
(Arduino�̕��̓��t�@�����X�T�C�g�ɍڂ��Ă��܂��B�ܘ_PIC�ɂ����l�̃��C�u�����͂���Ǝv���܂��B
�������APRO MICRO(���ۂ�LEONARDO�̃��C�u����)��STM32�{�[�h��PIC�A���̑��̃��C�u�����ł��ꂼ��Ⴂ�͂���܂��B
�ǂ���A���̎d�l�ɉ����ď������ƂɂȂ�܂��B)
HID�f�o�C�X�Ȃ�A�W���h���C�o�œ����̂Ńh���C�o�����K�v������܂���B
�}�E�X�A�L�[�{�[�h�A�W���C�p�b�h������̃f�o�C�X�ł��B
�����O�ɎQ�l�v���O�������悹���Ǝv���̂ł����ǁB(No.1347�ł�)
STM32F103�{�[�h�̕��̓R���|�W�b�g���C�u�����i�����̕����j�ɂȂ��Ă��āA
���[�h���������̂Ŗʓ|�ł��B�ł���{�͈ꏏ�ŁA
#include <USBComposite.h>
USBHID HID;
HIDKeyboard BootKeyboard(HID, 0);
void setup() {
HID.begin(HID_BOOT_KEYBOARD);
BootKeyboard.begin();
�܂ŋL�q����A���Ɏn�߂鏀�����o���Ă��܂��B
���
BootKeyboard.press('M');
BootKeyboard.release('M');
BootKeyboard.write('M');//�����ė�������
BootKeyboard.releaseAll();
�̗ނ̖��߂��ɉ����ď��������ł��B
���uBootKeyboard�v�͎��R�ɕt���Ă����͂��ł��B�B
�Ȃ̂�3�s�ڂ�
HIDKeyboard TEPA(HID, 0);
�Ƃ���A6�s�ڂ�
TEPA.begin();
�Ƃ��āA
TEPA.press('k');
�̂悤�Ɏg���܂��B
PRO MICRO�͒P�Ƃ�HID�L�[�{�[�h���C�u�����̂Ȃ̂ŁA�����ƊȒP��
#include "Keyboard.h"
void setup() {
Keyboard.begin();
}
��2�s��t����邾���ŏ���OK�ł��B
KEY_PAGE_UP
���͊��ɒ�`����Ă��܂��B
�܂Ƃ��ȃ}�j���A���͂���܂���A���C�u���������������āA���ۂɂ�USBHID.h�Ƃ����t�@�C���ɒ�`����Ă��܂����B
(Arduino�̕��̓��t�@�����X�T�C�g�ɍڂ��Ă��܂��B�ܘ_PIC�ɂ����l�̃��C�u�����͂���Ǝv���܂��B
�������APRO MICRO(���ۂ�LEONARDO�̃��C�u����)��STM32�{�[�h��PIC�A���̑��̃��C�u�����ł��ꂼ��Ⴂ�͂���܂��B
�ǂ���A���̎d�l�ɉ����ď������ƂɂȂ�܂��B)
�ҋ����b�N 2018/12/23(Sun) 23:09 No.1365 Re: �^����p,���ԕ�
 ������ #include <USBComposite.h>
������ #include <USBComposite.h>��L�Ńl�b�g�������܂������A�Y���Ȃ��I
����`�A������Ƃ���Ă��܂��ˁB
�������ł����A�ŋ߁A���ĂÂ��ɁA����W�̃A�N�V�f���g
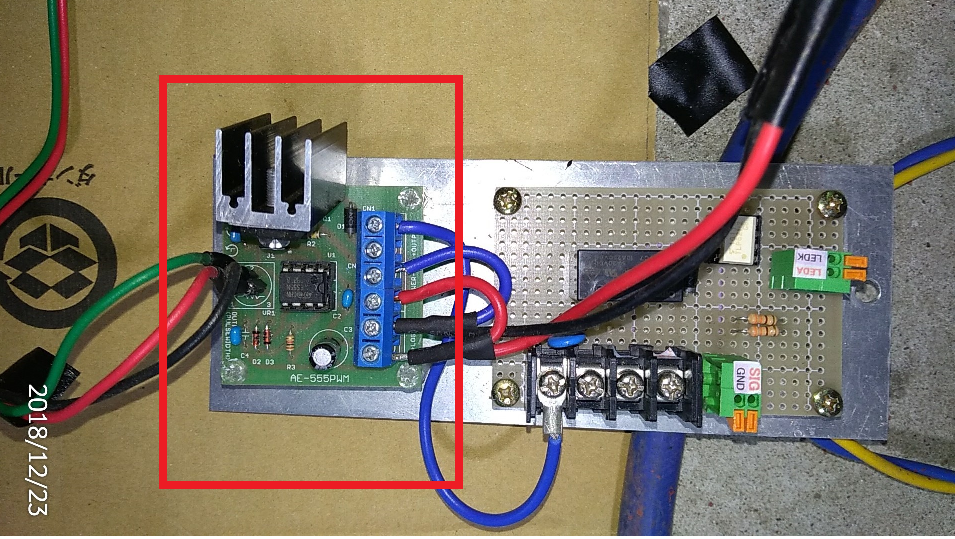
���A3���ڂ͐[���ł��B
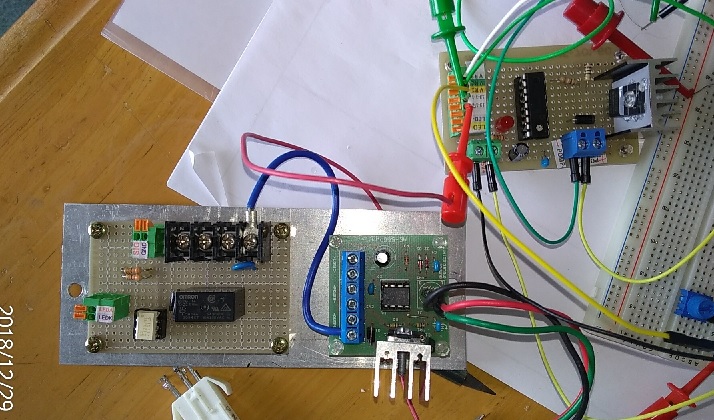
�|���v����Ɏg���Ă����A�H����PWM����ꂽ�悤�ł��B
�o�͒[�q����A�S���d���Ȃ��B
�d�����Ȃ��̂ŁA�Ƃ肠�����A�ʐ^�̐Ԙg�ɂ���
�H����PWM���ւ��܂��B
�������A�����ō�����Ԙg�ȊO�̃{�[�h�́A���Ȃ��B
TR 2018/12/24(Mon) 08:08 Re: �^����p,���ԕ�
 ���ڊW�Ȃ��Ă��݂܂���B
���ڊW�Ȃ��Ă��݂܂���B���z���ŏH��PWM�Ɏg���Ă��锭�M�p��IC555�������܂����B
���ʁA���������B
�ǂ����A���ꂪ�ʖڂ炵���B
�ꉞ�A�����ւ��Ɍ��肵�܂����B
TR 2018/12/24(Mon) 12:31 Re: �^����p,���ԕ�
 �g�p�}�C�R���̕��͂܂��ǂ���ɂ��邩�Y��ł��܂��B
�g�p�}�C�R���̕��͂܂��ǂ���ɂ��邩�Y��ł��܂��B�z�b�g�L�[�ɂ��ẮA�͂�����Ƃ������Ƃ͔���܂���B
�Ⴆ�ACtrl+ALT+1(Q�L�[�̏�ɂ����)���ƃ}�C�R�����L�[�{�[�h������ł��B
�������A����̂��̂͂�͂������l�ɂȂ�܂��B
�ł��A�܂��A�}�C�R���͂ǂ���ɂ���A���̖��͂���悤�ł����A�Ώ��ł��Ȃ���ł��Ȃ��̂�
���̕����ŔY��ł����ł��Ȃ��̂ł����ǁB
�E���܂�ADC�͎g�������Ȃ���STM32�{�[�h���ǂ����Ȃ�
�E�s���w�b�_���ז���PRO MICRO�̕����������肷�邩�Ȃ�
���ƂȂ��Ă͎g��������Ȃ�STM32�{�[�h�p�̍ŏ��̃X�P�b�`�ł��B
���ێ�������ł͖����̂ŁA�����ς��Ȃ��Ɠ����Ȃ��Ǝv���܂��B
�啔���́A�u�������{�^���ɑΉ�����R�[�h�𑗂�v�Ƃ��������ł��B
�������̓u�[�g�L�[�{�[�h����Ȃ��āA�P�Ȃ�L�[�{�[�h�ɂȂ��Ă��܂��ˁB
(�����Ⴄ�̂��͔c�����Ă��܂���B����̌��ł͂ǂ���̃��[�h�ł���������)
#include <USBComposite.h>
const uint32_t used_pin=0b11111111110110000011111111111;
uint16_t pin_old[29];
uint8_t pin_state[29];
volatile uint8_t axis,feed,step_unit;
USBHID HID;
HIDKeyboard TEPA(HID);
void read_mode(void) {
for(byte i=0; i<=2; i++) {
if(digitalRead(i)==0)axis=i;
}
for(byte i=19; i<=22; i++) {
if(digitalRead(i)==0)step_unit=i;
}
for(byte i=23; i<=25; i++) {
if(digitalRead(i)==0)feed=i;
}
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
TEPA.press('.'); //��{�I�ɁASTEP���f�t�H���g
if(step_unit==22)TEPA.write('K');
else if(step_unit==21)TEPA.write('L');
else if(step_unit==20)TEPA.write(';');
else if(step_unit==19)TEPA.write(':');
if(feed==25)TEPA.write('F');
else if(feed==24)TEPA.write('G');
else if(feed==23)TEPA.write('H');
TEPA.releaseAll();
}
void setup() {
HID.begin(HID_KEYBOARD);
TEPA.begin();
for(byte i=0; i<=28; i++) {
if((used_pin>>i)&1) {
pinMode(i,INPUT_PULLUP);
}
}
delay(1000);
read_mode();
}
void loop() {
byte enc;
for(byte i=0; i<=28; i++) { //16bit������ۑ�
if((used_pin>>i)&1) {
pin_old[i]<<=1;
if(digitalRead(i)==0) {//SW-ON
pin_old[i]++;
if(pin_old[i]=0xFFFF) {
if(i<=2 && i!=axis) {
axis=i;
} else if(i>=19 && i<=22 && i!=step_unit) {
step_unit=i;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
if(i==19)TEPA.press(':');
else if(i==20)TEPA.press(';');
else if(i==21)TEPA.press('L');
else if(i==22)TEPA.press('K');
TEPA.releaseAll();
} else if(i>=23 && i<=25 && i!=feed) {
feed=i;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
if(i==23)TEPA.press('H');
else if(i==24)TEPA.press('G');
else if(i==25)TEPA.press('F');
TEPA.releaseAll();
} else if(i==3 && pin_state[3]==0) { //1/2
pin_state[3]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
if(axis==0)TEPA.press('A');
else if(axis==1)TEPA.press('S');
else if(axis==2)TEPA.press('D');
TEPA.releaseAll();
} else if(i==4 && pin_state[i]==0) { //z1.02
pin_state[4]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
TEPA.press('/');
TEPA.releaseAll();
} else if(i==5 && pin_state[i]==0) { //DRO 0
pin_state[5]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
if(axis==0)TEPA.press('B');
else if(axis==1)TEPA.press('N');
else if(axis==2)TEPA.press('M');
TEPA.releaseAll();
} else if(i<=8 && pin_state[i]==0) { //g56,55,54
pin_state[i]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
if(i==8)TEPA.press('4');
else if(i==7)TEPA.press('5');
else if(i==6)TEPA.press('6');
TEPA.releaseAll();
} else if(i==26 && pin_state[i]==0) { //stop
pin_state[i]=1;
TEPA.press(KEY_RIGHT_ALT);
TEPA.press('S');
TEPA.releaseAll();
} else if(i==27 && pin_state[i]==0) {
pin_state[i]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
if(axis==0)TEPA.press('W');
else if(axis==1)TEPA.press('E');
else if(axis==2)TEPA.press('R');
TEPA.releaseAll();
} else if(i==28 && pin_state[i]==0) { //G0z1
pin_state[i]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
TEPA.press('Z');
TEPA.releaseAll();;
} else if(i==9 && pin_state[i]==0) { //+ ��release�͂��Ȃ�
pin_state[i]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
TEPA.write(',');//CONT�w��
if(axis==0)TEPA.press(KEY_RIGHT_ARROW);
else if(axis==1)TEPA.press(KEY_UP_ARROW);
else if(axis==2)TEPA.press(KEY_PAGE_UP);
} else if(i==10 && pin_state[i]==0) { //- ��release�͂��Ȃ�
pin_state[i]=1;
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
TEPA.write(',');//CONT�w��
if(axis==0)TEPA.press(KEY_LEFT_ARROW);
else if(axis==1)TEPA.press(KEY_DOWN_ARROW);
else if(axis==2)TEPA.press(KEY_PAGE_DOWN);
}
}
} else { //SW-OFF
if(pin_old[i]==0) {
if((i==9 || i==10)&& pin_state[i]==1) {
pin_state[i]=0;
TEPA.releaseAll();
TEPA.press(KEY_RIGHT_CTRL);
TEPA.press(KEY_RIGHT_ALT);
TEPA.press('.');//STEP�w��
TEPA.releaseAll();
} else if(pin_state[i]==1)pin_state[i]=0;
}
}
enc=((pin_old[16]&0b11)<<2)|(pin_old[17]&0b11);//step-cont�ؑւ�
if(enc==1) {
if(axis==0)TEPA.write(KEY_RIGHT_ARROW);
else if(axis==1)TEPA.write(KEY_UP_ARROW);
else if(axis==2)TEPA.write(KEY_PAGE_UP);
} else if(enc==2) {
if(axis==0)TEPA.press(KEY_LEFT_ARROW);
else if(axis==1)TEPA.press(KEY_DOWN_ARROW);
else if(axis==2)TEPA.press(KEY_PAGE_DOWN);
}
}
}
delay(1);
}
�ҋ����b�N 2018/12/24(Mon) 19:00 No.1368 Re: �^����p,���ԕ�
�ҋ����b�N����C�s�q����C�����́B
�ҋ����b�N����C�^��_�ւ̉��肪�Ƃ��������܂��B
arduino�C���C�u�����[���C�[�����Ă��ł��ˁB
�@��ɂ����̂ł��傤���ǁC�{���C�e�ł��ˁB
�P�U�n��PIC���ƁC�V�������̂łȂ��ƁCUSB�̃C���^�[�t�F�[�X���C���ڂ��ĂȂ��悤�ł��ˁB
���������Ă���C�P�U�t�@�~���[�ł̉�����ł��CUSB�̃C���^�[�t�F-�X�ɂ��ẮC�ڂ��ĂȂ��ł��B
STM32F103��USB�̃��C�u����-������Ƃ݂Ă݂܂����B
https://github.com/arpruss/USBComposite_stm32f1
PIC�̂��Ƃ��悭������Ȃ��̂ł����Carduino�́C�Ȃ[�����Ă���悤�Ȋ����ł��B
PIC����16�n�ł́C16F1455��USB�̃C���^�[�t�F�[�X���ڂȂ̂ł��ˁB
�H���ł̔̔���2016�N������ł��̂ŁC�V�����ł���ˁB
���̂�����́Barduino�@�̕����i��ł��ł��傤���ˁB
�s�q����C�o�v�l�̃R���g���[���[�̕s��C�����������Ă悩�����ł��ˁB
�h�b�́C���������āC���ؐ��������肵�āE�E�E�E�E�E�B
�h�b�̌������C�S�̂̔��������̕�����������ł��傤���ˁB
�ҋ����b�N����C�^��_�ւ̉��肪�Ƃ��������܂��B
arduino�C���C�u�����[���C�[�����Ă��ł��ˁB
�@��ɂ����̂ł��傤���ǁC�{���C�e�ł��ˁB
�P�U�n��PIC���ƁC�V�������̂łȂ��ƁCUSB�̃C���^�[�t�F�[�X���C���ڂ��ĂȂ��悤�ł��ˁB
���������Ă���C�P�U�t�@�~���[�ł̉�����ł��CUSB�̃C���^�[�t�F-�X�ɂ��ẮC�ڂ��ĂȂ��ł��B
STM32F103��USB�̃��C�u����-������Ƃ݂Ă݂܂����B
https://github.com/arpruss/USBComposite_stm32f1
PIC�̂��Ƃ��悭������Ȃ��̂ł����Carduino�́C�Ȃ[�����Ă���悤�Ȋ����ł��B
PIC����16�n�ł́C16F1455��USB�̃C���^�[�t�F�[�X���ڂȂ̂ł��ˁB
�H���ł̔̔���2016�N������ł��̂ŁC�V�����ł���ˁB
���̂�����́Barduino�@�̕����i��ł��ł��傤���ˁB
�s�q����C�o�v�l�̃R���g���[���[�̕s��C�����������Ă悩�����ł��ˁB
�h�b�́C���������āC���ؐ��������肵�āE�E�E�E�E�E�B
�h�b�̌������C�S�̂̔��������̕�����������ł��傤���ˁB
mabo 2018/12/25(Tue) 21:04 No.1370 Re: �^����p,���ԕ�
 �ҋ����b�N����̂́A���͂��ł������B
�ҋ����b�N����̂́A���͂��ł������B�v���O���������Ă��`���v���J���v���ł��B
IC555�͏H���ŁB�m��20�~�ł����B
�������500�~�ł��B
�ꉞ�A�����w�����܂����B
�ł��AFET��PIC���g���ADC�|���v�����炩�ɉ��Ƃ��Ă��܂��B
�ł��ADC5V�ʂ���A��C�ɉ���Ă��܂������ł��B
���Y�C�B
�}�ʂňꕔ���
GND�́A���ʂł��B
TR 2018/12/25(Tue) 22:44 Re: �^����p,���ԕ�
> MABO����
��{�I�ɁA��ʂ̃}�C�R���قǕ��G�ł����ǁA�t�ɕ��G�ȕ����͎̂ċ����āH�A�ȒP�ɂȂ�܂��B
PC�͓����͕��G������ǂ��A�����m��Ȃ��Ă������ɃC���^�[�l�b�g��EXCEL���o����̂Ɠ����ł��B
�܂��A���G�ȕ����͑��l�ɔC���Ă���̂ł����ǁB
��{�I�ɁAArduino��mbed�Ȃǂ�����(WINDOWS��MAC�̂悤�Ȃ���)�ŁA����ɑΉ�������A�����悤�ȑ����
GPIO���͑���܂��B�iArduino�ɑΉ������f�o�C�X��Arduino���ɏ����āAmbed�Ȃ�mbed���ɏ����j
Arduino�iUNO�j�Ȃ�A���W�X�^���삩�烉�C�u�������g�����A�l�X�ȃf�o�C�X���e�ՂɓZ�߂��܂��B
�܂�A���傩�牞�p�܂őΉ��o���܂��B
PIC�ł��������������o���邩�́A�ǂ�����܂���B(�ܘ_�A�}�C�R�����\�ł͂Ȃ��A�J�����̖��ł�)
USB��PIC16F���炠��܂����A�i���낦�I�ɂ�PIC�͖��Ȃ��ł��B
�����ǁA�ݒ肪�ʓ|�Ȃ�ł���ˁB������Ahttp://bit-trade-one.co.jp/product/assemblydisk/revive-usb/
�̂悤�ȕ�����������Ă��܂��B
�ł��A����������Ȃ�A���̃R�[�h�����ς�������Ahttps://garretlab.web.fc2.com/arduino_reference/language/functions/usb/index.html
�����āAArduino�őg�����y�Ŗʔ������Ǝv���܂��B
> TR����
�v���O�������̂͑S�R������̂ł͂���܂����B
�{�^���������ꂽ��1��_�ł�����A�Ƃ���L�`�J�Ɠ����ނ̂��̂ł��B
���ꂪ�A1��i���̃{�^���ɑΉ�����j�L�[�R�[�h�𑗂�A�ƂȂ��Ă��邾���ł��B
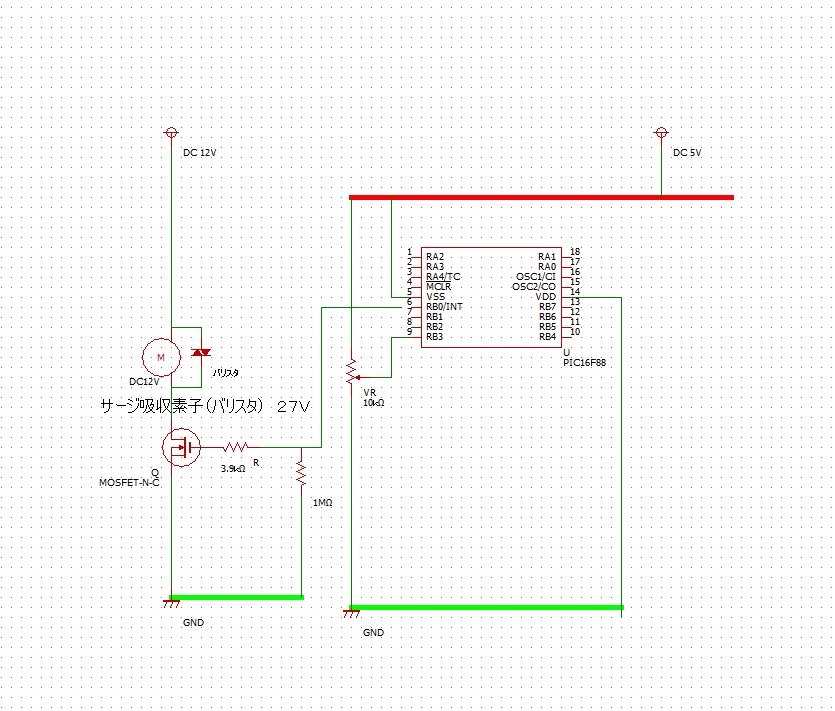
�ŁA���̉�H�ł����ǁA
�EFET��4V�i������2.5V�j�쓮�i��I��
�E�v���_�E����R�͍������ł��B���\�������ǂ��ł��B
�E3.5k���̕����̓v���_�E����R��1/10���x���ǂ����ȁH
�E�o���X�^�����_�C�I�[�h���ǂ��ł��B
�@���o���X�^27V�Ȃ���ۂ̃o���X�^�d���H��30V�Ƃ��āA42V�ɂȂ�������DC12V���Ɋҗ�����܂��B
�@�@�܂�A42V�̃T�[�W���c��܂��B
�@�@�_�C�I�[�h�Ȃ�12.6V�Ŋҗ������̂ŁA�قڃT�[�W�������܂��B
��{�I�ɁA��ʂ̃}�C�R���قǕ��G�ł����ǁA�t�ɕ��G�ȕ����͎̂ċ����āH�A�ȒP�ɂȂ�܂��B
PC�͓����͕��G������ǂ��A�����m��Ȃ��Ă������ɃC���^�[�l�b�g��EXCEL���o����̂Ɠ����ł��B
�܂��A���G�ȕ����͑��l�ɔC���Ă���̂ł����ǁB
��{�I�ɁAArduino��mbed�Ȃǂ�����(WINDOWS��MAC�̂悤�Ȃ���)�ŁA����ɑΉ�������A�����悤�ȑ����
GPIO���͑���܂��B�iArduino�ɑΉ������f�o�C�X��Arduino���ɏ����āAmbed�Ȃ�mbed���ɏ����j
Arduino�iUNO�j�Ȃ�A���W�X�^���삩�烉�C�u�������g�����A�l�X�ȃf�o�C�X���e�ՂɓZ�߂��܂��B
�܂�A���傩�牞�p�܂őΉ��o���܂��B
PIC�ł��������������o���邩�́A�ǂ�����܂���B(�ܘ_�A�}�C�R�����\�ł͂Ȃ��A�J�����̖��ł�)
USB��PIC16F���炠��܂����A�i���낦�I�ɂ�PIC�͖��Ȃ��ł��B
�����ǁA�ݒ肪�ʓ|�Ȃ�ł���ˁB������Ahttp://bit-trade-one.co.jp/product/assemblydisk/revive-usb/
�̂悤�ȕ�����������Ă��܂��B
�ł��A����������Ȃ�A���̃R�[�h�����ς�������Ahttps://garretlab.web.fc2.com/arduino_reference/language/functions/usb/index.html
�����āAArduino�őg�����y�Ŗʔ������Ǝv���܂��B
> TR����
�v���O�������̂͑S�R������̂ł͂���܂����B
�{�^���������ꂽ��1��_�ł�����A�Ƃ���L�`�J�Ɠ����ނ̂��̂ł��B
���ꂪ�A1��i���̃{�^���ɑΉ�����j�L�[�R�[�h�𑗂�A�ƂȂ��Ă��邾���ł��B
�ŁA���̉�H�ł����ǁA
�EFET��4V�i������2.5V�j�쓮�i��I��
�E�v���_�E����R�͍������ł��B���\�������ǂ��ł��B
�E3.5k���̕����̓v���_�E����R��1/10���x���ǂ����ȁH
�E�o���X�^�����_�C�I�[�h���ǂ��ł��B
�@���o���X�^27V�Ȃ���ۂ̃o���X�^�d���H��30V�Ƃ��āA42V�ɂȂ�������DC12V���Ɋҗ�����܂��B
�@�@�܂�A42V�̃T�[�W���c��܂��B
�@�@�_�C�I�[�h�Ȃ�12.6V�Ŋҗ������̂ŁA�قڃT�[�W�������܂��B
�ҋ����b�N 2018/12/26(Wed) 12:37 No.1372 Re: �^����p,���ԕ�
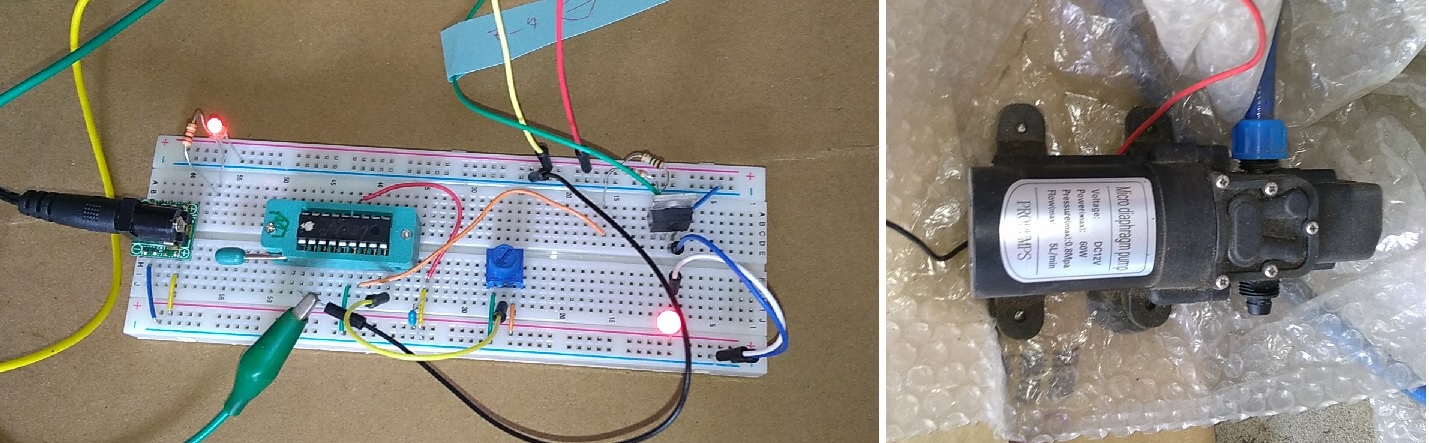 �ҋ����b�N����ցA
�ҋ����b�N����ցA��قǁA�o���b�N�Ńe�X�g�������܂����B
���|���v�́A���炭���������ł��B
���삷��d���͈̔͂ł��B
�\����DC12V�ł����ADC24�ł��s�������ł��B
�o���X�^�͂ǂ����đI�Ԃ̂�������܂���ł����B
�ȉ��̃y�[�W���Q�l�ɂ��āA�o���܂����B
VE��VA�i�P�|���j�@�c�A
VE�F��H�d��
VA�F�ő勖�e��H�d��
���F�v�}�[�W���i����0.2�j
http://www.koaglobal.com/product/basic/varistor
�{���͈Ⴄ�̂ł����A�悩������A
�ڂ��������Ă��������B
MOSFET�̂PM���́A���M������܂��B
���g�����W�X�^��H�̐v����o���܂������A�����̌��ʁA��͂�1M������Ȃ��ƁA
GND���Ɉ��������Ȃ��āA�h���C������d��������Ă��܂��܂����B
FET�����ւ�3.9�����́A�����̌��ʁA��Ԉ��肵�Ă��܂����B
�����A�Q�l�����ł��n�b�L���Ƃ��܂���ł����B
�o���X�^�́A�����_�C�I�[�h�ɕς��܂��B
���ꂩ��A�����Ă���������PWM��AD�̃v���O�����́A�����ł����̂ŁA
�劈�Ă��܂���B
�o���b�N�ł̃e�X�g�́A����d���ł�����̂ŁA�|���v�����Ȃ����炩�ɉ���Ă��܂��B
�{�����[�����������Ă���ƋC���������ł��B
�����A�|���v�����܂����A�{�����[����ڂ����ς��ɍi���Ă��Ȃ��̂ɒ�~���܂��B
����̓v���O��������Ȃ��|���v�ł��B
�Ȃɂ��ADC18V�̓d�����ƃp���t���ɉ���Ă���܂�����A�����ƁA�œK�̓d���͂P�QV����Ȃ������Əゾ�Ǝv���܂��B
����́AMPLAB�̌��ꂶ��Ȃ��̂ł����H
�ʐ^�́A�o���b�N�ł̃e�X�g���i�ł��B
TR 2018/12/26(Wed) 14:36 Re: �^����p,���ԕ�
�F�����́B
�����ė~������������܂��B
SEC��̃|�[�g�Q�@SL13��1�@����̏o�͐M���i���ꂪ�A�u-�d���v�Ȃ�ł��A�A�A�B�j�B
���܂ŁA�t�Ɍq���ł��܂����B
�b��߂��܂��B
PWM��SL13��1����̐M����RB7�Ɍq���ARB7�ɂ��S�̂𐧌䂵�����Ǝv���܂��B
�����ŁA�v���O�����̐^������A�@�̂Ƃ���ɁAbreak����t���܂����B
����ŁA�X�����ł��傤���H
����
RB7��Lo�ŁA���ׂĒ�~�A
Hi�ŁA
�E�S�̂̓��샂�j�^�[�p��LED
�EPWM�M����RB0�[�q�ŁADC���[�^�[�|���v����]������
�ERB3�ʼn�]����d���ǂݎ��
/*�o�v�l�@�\�ɂ��RB3�ϒ�R�Ő���*/
//RB7��SEC��|�[�g2��SL-13��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď邻�̕\����LED��RA1���甭��������
//RB0���o�͒[�q�k�d�cPIC16F1827 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
// CONFIG1
#pragma config FOSC = INTOSC // Oscillator Selection (INTOSC oscillator: I/O function on CLKIN pin)
#pragma config WDTE = OFF // Watchdog Timer Enable (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable (PWRT enabled)
#pragma config MCLRE = OFF // MCLR Pin Function Select (MCLR/VPP pin function is digital input)
#pragma config CP = OFF // Flash Program Memory Code Protection (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Memory Code Protection (Data memory code protection is disabled)
#pragma config BOREN = ON // Brown-out Reset Enable (Brown-out Reset enabled)
#pragma config CLKOUTEN = OFF // Clock Out Enable (CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin)
#pragma config IESO = ON // Internal/External Switchover (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable (Fail-Safe Clock Monitor is enabled)
// CONFIG2
#pragma config WRT = OFF // Flash Memory Self-Write Protection (Write protection off)
#pragma config PLLEN = OFF // PLL Enable (4x PLL disabled)
#pragma config STVREN = OFF // Stack Overflow/Underflow Reset Enable (Stack Overflow or Underflow will not cause a Reset)
#pragma config BORV = LO // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (Vbor), low trip point selected.)
#pragma config LVP = OFF // Low-Voltage Programming Enable (High-voltage on MCLR/VPP must be used for programming)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM(void);
void InitTimer2(void);
unsigned int adconv(void);
// ���C����
void main(void) {
OSCCON = 0b0110101; //�N���b�N���g����1MHz�ɐݒ�
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // �ϒ�R�̓d���ǂݍ��ݗp��RB3�̂݃A�i���O
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 �ϒ�R�pADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(AN9�@RB3����Ǎ���)
ADCON1 = 0b10010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/8�AVDD�����t�@�����X�Ƃ���
__delay_us(5); // �A�i���O�ϊ���ݒ肳���܂łƂ肠�����҂�
//�ϐ��錾
unsigned int num;
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
while (1) {
�@ if(RB7==0){break;}
LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
num = adconv(); // RB3�@9�ԃs��(AN9)���甼�Œ��R�̒l��ǂݍ���
CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
CCP1CONbits.DC1B = num & 0b11;
__delay_ms(10);
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
temp = ADRESH; //
temp = (temp << 8) + ADRESL; //RA3�œǂݍ��l��temp�ɑ��
return temp; //�ǂݍ���temp��num�ɕԂ�
}
// PWM���[�h�ݒ��
void InitPWM(void) {
APFCON0bits.CCP1SEL = 1; // RB0�[�q���o�͒[�q�ɐݒ�
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3 = 1;
CCP1CONbits.CCP1M2 = 1;
CCP1CONbits.CCP1M1 = 0;
CCP1CONbits.CCP1M0 = 0;
// ������255�ʕb�ɐݒ�iPR2 + 1�ʕb�j�~1/�i���쏈�����x���S�j
PR2 = 255; //PR2���W�X�^8bit0~255
// �f���[�e�B�[�T�C�N����0ms�ŏ�����
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}
// �^�C�}2�ݒ��
void InitTimer2(void) {
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1 = 0;
T2CONbits.T2CKPS0 = 0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON = 1;
}
�����ė~������������܂��B
SEC��̃|�[�g�Q�@SL13��1�@����̏o�͐M���i���ꂪ�A�u-�d���v�Ȃ�ł��A�A�A�B�j�B
���܂ŁA�t�Ɍq���ł��܂����B
�b��߂��܂��B
PWM��SL13��1����̐M����RB7�Ɍq���ARB7�ɂ��S�̂𐧌䂵�����Ǝv���܂��B
�����ŁA�v���O�����̐^������A�@�̂Ƃ���ɁAbreak����t���܂����B
����ŁA�X�����ł��傤���H
����
RB7��Lo�ŁA���ׂĒ�~�A
Hi�ŁA
�E�S�̂̓��샂�j�^�[�p��LED
�EPWM�M����RB0�[�q�ŁADC���[�^�[�|���v����]������
�ERB3�ʼn�]����d���ǂݎ��
/*�o�v�l�@�\�ɂ��RB3�ϒ�R�Ő���*/
//RB7��SEC��|�[�g2��SL-13��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď邻�̕\����LED��RA1���甭��������
//RB0���o�͒[�q�k�d�cPIC16F1827 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
// CONFIG1
#pragma config FOSC = INTOSC // Oscillator Selection (INTOSC oscillator: I/O function on CLKIN pin)
#pragma config WDTE = OFF // Watchdog Timer Enable (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable (PWRT enabled)
#pragma config MCLRE = OFF // MCLR Pin Function Select (MCLR/VPP pin function is digital input)
#pragma config CP = OFF // Flash Program Memory Code Protection (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Memory Code Protection (Data memory code protection is disabled)
#pragma config BOREN = ON // Brown-out Reset Enable (Brown-out Reset enabled)
#pragma config CLKOUTEN = OFF // Clock Out Enable (CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin)
#pragma config IESO = ON // Internal/External Switchover (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable (Fail-Safe Clock Monitor is enabled)
// CONFIG2
#pragma config WRT = OFF // Flash Memory Self-Write Protection (Write protection off)
#pragma config PLLEN = OFF // PLL Enable (4x PLL disabled)
#pragma config STVREN = OFF // Stack Overflow/Underflow Reset Enable (Stack Overflow or Underflow will not cause a Reset)
#pragma config BORV = LO // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (Vbor), low trip point selected.)
#pragma config LVP = OFF // Low-Voltage Programming Enable (High-voltage on MCLR/VPP must be used for programming)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM(void);
void InitTimer2(void);
unsigned int adconv(void);
// ���C����
void main(void) {
OSCCON = 0b0110101; //�N���b�N���g����1MHz�ɐݒ�
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // �ϒ�R�̓d���ǂݍ��ݗp��RB3�̂݃A�i���O
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 �ϒ�R�pADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(AN9�@RB3����Ǎ���)
ADCON1 = 0b10010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/8�AVDD�����t�@�����X�Ƃ���
__delay_us(5); // �A�i���O�ϊ���ݒ肳���܂łƂ肠�����҂�
//�ϐ��錾
unsigned int num;
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
while (1) {
�@ if(RB7==0){break;}
LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
num = adconv(); // RB3�@9�ԃs��(AN9)���甼�Œ��R�̒l��ǂݍ���
CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
CCP1CONbits.DC1B = num & 0b11;
__delay_ms(10);
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
temp = ADRESH; //
temp = (temp << 8) + ADRESL; //RA3�œǂݍ��l��temp�ɑ��
return temp; //�ǂݍ���temp��num�ɕԂ�
}
// PWM���[�h�ݒ��
void InitPWM(void) {
APFCON0bits.CCP1SEL = 1; // RB0�[�q���o�͒[�q�ɐݒ�
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3 = 1;
CCP1CONbits.CCP1M2 = 1;
CCP1CONbits.CCP1M1 = 0;
CCP1CONbits.CCP1M0 = 0;
// ������255�ʕb�ɐݒ�iPR2 + 1�ʕb�j�~1/�i���쏈�����x���S�j
PR2 = 255; //PR2���W�X�^8bit0~255
// �f���[�e�B�[�T�C�N����0ms�ŏ�����
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}
// �^�C�}2�ݒ��
void InitTimer2(void) {
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1 = 0;
T2CONbits.T2CKPS0 = 0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON = 1;
}
TR 2018/12/26(Wed) 20:47 Re: �^����p,���ԕ�
DC���[�^�͓d���ɂ���ė́i��]���j���ς��܂��B
�Ȃ̂ŁA�d�����グ��Ώグ��قlj��܂��B
�������A����댯�����オ��܂��B
�d����2�{�ɂ���Γd����2�{����A����d�͂�4�{�ɂȂ�܂��B���R���M��4�{�ł�����C��t���Ă��������B
> GND���Ɉ��������Ȃ���
���������悤�ł����ǁA1M������10k���̕�����������͂�100�{����܂��B
����ǂ��A���܂�FET�͎g���Ă��Ȃ��̂ŁA�ǂ̈ʂ��K���͎��M������܂���B
�o���X�^�͌𗬂̕����ǂ��g���܂��B
�𗬂̏ꍇ�͑f�q�̗���������ւ��܂�����A�����Ώ�����K�v������܂��B
�Ⴆ��AC12V�Ȃ�ő�17V���x�ł���ˁH���̏ꍇ�͎���20V�̃o���X�^������ő�l��3V�I�[�o�[�̒l�܂łɂƂǂ߂��܂��B
�ł��A����̂悤��DC12V�̏ꍇ�́A20V���Ƌt�d���̏ꍇ��20+12V��32V�ȏ�̎���VCC(12V)���ɗ���鎖�ɂȂ�܂��B
�ŁA�_�C�I�[�h�Ȃ�0.6V���x�ŗ��ꂾ���̂ł�����̕������E�߂��܂��B
�v���O�����̕��ł����ǁA�͂�����Ƃ͌����܂��Ǒ����A�ċN�����J��Ԃ��̂��Ǝv���܂��B
�ŁA�����܂ł̃v���O�����ł�PWM��LOW��ԂȂ̂ŁA��́ALOW�o�͂��邢�̓A�i���O���͂ɂȂ�Ǝv���܂��B
�����g�̓v���O�������I���R�[�h�����������Ƃ������̂ŁA���R�A���������Ƃ�����܂���B
�Ȃ̂ŁA�d�����グ��Ώグ��قlj��܂��B
�������A����댯�����オ��܂��B
�d����2�{�ɂ���Γd����2�{����A����d�͂�4�{�ɂȂ�܂��B���R���M��4�{�ł�����C��t���Ă��������B
> GND���Ɉ��������Ȃ���
���������悤�ł����ǁA1M������10k���̕�����������͂�100�{����܂��B
����ǂ��A���܂�FET�͎g���Ă��Ȃ��̂ŁA�ǂ̈ʂ��K���͎��M������܂���B
�o���X�^�͌𗬂̕����ǂ��g���܂��B
�𗬂̏ꍇ�͑f�q�̗���������ւ��܂�����A�����Ώ�����K�v������܂��B
�Ⴆ��AC12V�Ȃ�ő�17V���x�ł���ˁH���̏ꍇ�͎���20V�̃o���X�^������ő�l��3V�I�[�o�[�̒l�܂łɂƂǂ߂��܂��B
�ł��A����̂悤��DC12V�̏ꍇ�́A20V���Ƌt�d���̏ꍇ��20+12V��32V�ȏ�̎���VCC(12V)���ɗ���鎖�ɂȂ�܂��B
�ŁA�_�C�I�[�h�Ȃ�0.6V���x�ŗ��ꂾ���̂ł�����̕������E�߂��܂��B
�v���O�����̕��ł����ǁA�͂�����Ƃ͌����܂��Ǒ����A�ċN�����J��Ԃ��̂��Ǝv���܂��B
�ŁA�����܂ł̃v���O�����ł�PWM��LOW��ԂȂ̂ŁA��́ALOW�o�͂��邢�̓A�i���O���͂ɂȂ�Ǝv���܂��B
�����g�̓v���O�������I���R�[�h�����������Ƃ������̂ŁA���R�A���������Ƃ�����܂���B
�ҋ����b�N 2018/12/26(Wed) 22:36 No.1375 Re: �^����p,���ԕ�
>�v���O�����̕��ł����ǁA�͂�����Ƃ͌����܂��Ǒ����A�ċN�����J��Ԃ��̂��Ǝv���܂��B
���܂Ŏg���Ă����A�H����PWM�L�b�g�́A�g���Ă��āA�������_������܂��B
����́A���S��ON�EOFF���Ȃ����B
���̌��_�Ƃ��v���鎖�́A�H����PWM�L�b�g�������ɂ��A���̎|�̋L�ڂ�����܂��B
����A����A�܁`�K���N�^�ł����ǁi���j
���̕ӂ̌��_�����Ƃ��Ǝv��������ł��B
����ƁA������_����܂��B
�{�����[���̓r���ŁA���[�^�[����~���܂��B
��������Ƃ��������̂ł����A���������A�C�f�A����܂��H
PWM�́AMACH3�̃{�^������ɔ����ASEC�����̐M����PIC16F1827���Đ��䂵�܂��B
AD�ϊ�����d��l�Ƃ������̂��ȁ`�A
�d��l�ȏ�ɂȂ�����A�d���̓ǂݎ��J�n�Ƃ��A
�����炢���̂ł��傤���H
�������ADUTY���I
�NjL
Duty�����߂�CCPR1�ɍŏ�������Z������A�ǂ����ȁH
�{400 �Ƃ� 500
���쑬�x����Z�o����B
���܂Ŏg���Ă����A�H����PWM�L�b�g�́A�g���Ă��āA�������_������܂��B
����́A���S��ON�EOFF���Ȃ����B
���̌��_�Ƃ��v���鎖�́A�H����PWM�L�b�g�������ɂ��A���̎|�̋L�ڂ�����܂��B
����A����A�܁`�K���N�^�ł����ǁi���j
���̕ӂ̌��_�����Ƃ��Ǝv��������ł��B
����ƁA������_����܂��B
�{�����[���̓r���ŁA���[�^�[����~���܂��B
��������Ƃ��������̂ł����A���������A�C�f�A����܂��H
PWM�́AMACH3�̃{�^������ɔ����ASEC�����̐M����PIC16F1827���Đ��䂵�܂��B
AD�ϊ�����d��l�Ƃ������̂��ȁ`�A
�d��l�ȏ�ɂȂ�����A�d���̓ǂݎ��J�n�Ƃ��A
�����炢���̂ł��傤���H
�������ADUTY���I
�NjL
Duty�����߂�CCPR1�ɍŏ�������Z������A�ǂ����ȁH
�{400 �Ƃ� 500
���쑬�x����Z�o����B
TR 2018/12/27(Thu) 07:00 Re: �^����p,���ԕ�
PWM�̓���J�n���T�O������o�����炢���ȁ`�ƁA�l���܂����B
�����ŁA�v���O�����^�ӂ�ɁA�@�@�A�����������܂����B
�T�O���́A�����N���b�N1Mhz�ɂ����̂ŁA
�P/1000000�@���@1�T�C�N�����Ԃ́A1�ʂ���1000����
�T�O���Ȃ�A500����
�������琄���Ȃ̂ł����A
�T�O���ɂ������Ȃ�A�b�b�o�q1�k��500�ł����Ǝv���܂����B
�@���ł��傤���H
���w�E�肢�܂��B
�X�������肢���܂��B
/*�o�v�l�ɂ��RB3�ʼnϒ�R���䂵�ARB0���o�͒[�q*/
//RB7��SEC��|�[�g2��SL-13��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//���̕\���𑀍�Ղ�LED��RA1���甭��������A�܂��A��Ղł�RA0����LED�ɂ�蔭��������
//PIC16F1827 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
// CONFIG1
#pragma config FOSC = INTOSC // Oscillator Selection (INTOSC oscillator: I/O function on CLKIN pin)
#pragma config WDTE = OFF // Watchdog Timer Enable (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable (PWRT enabled)
#pragma config MCLRE = OFF // MCLR Pin Function Select (MCLR/VPP pin function is digital input)
#pragma config CP = OFF // Flash Program Memory Code Protection (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Memory Code Protection (Data memory code protection is disabled)
#pragma config BOREN = ON // Brown-out Reset Enable (Brown-out Reset enabled)
#pragma config CLKOUTEN = OFF // Clock Out Enable (CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin)
#pragma config IESO = ON // Internal/External Switchover (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable (Fail-Safe Clock Monitor is enabled)
// CONFIG2
#pragma config WRT = OFF // Flash Memory Self-Write Protection (Write protection off)
#pragma config PLLEN = OFF // PLL Enable (4x PLL disabled)
#pragma config STVREN = OFF // Stack Overflow/Underflow Reset Enable (Stack Overflow or Underflow will not cause a Reset)
#pragma config BORV = LO // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (Vbor), low trip point selected.)
#pragma config LVP = OFF // Low-Voltage Programming Enable (High-voltage on MCLR/VPP must be used for programming)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM(void);
void InitTimer2(void);
unsigned int adconv(void);
// ���C����
void main(void) {
OSCCON = 0b0110101; //�N���b�N���g����1MHz�ɐݒ�
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // �ϒ�R�̓d���ǂݍ��ݗp��RB3�̂݃A�i���O
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 �ϒ�R�pADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(AN9�@RB3����Ǎ���)
ADCON1 = 0b10010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/8�AVDD�����t�@�����X�Ƃ���
__delay_us(5); // �A�i���O�ϊ���ݒ肳���܂łƂ肠�����҂�
//�ϐ��錾
unsigned int num;//ADRESH�̒l
unsigned int duty;
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
while (1) {
if(RB7==0){__delay_ms(10);break;}
LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
num = adconv(); // RB3�@9�ԃs��(AN9)���甼�Œ��R�̒l��ǂݍ���
�@ duty=500+num;//Duty��50������X�^�[�g
�A if(duty > 500){
CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
CCP1CONbits.DC1B = num & 0b11;
__delay_ms(10);}
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
temp = ADRESH; //
temp = (temp << 8) + ADRESL; //RA3�œǂݍ��l��temp�ɑ��
return temp; //�ǂݍ���temp��num�ɕԂ�
}
// PWM���[�h�ݒ��
void InitPWM(void) {
APFCON0bits.CCP1SEL = 1; // RB0�[�q���o�͒[�q�ɐݒ�
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3 = 1;
CCP1CONbits.CCP1M2 = 1;
CCP1CONbits.CCP1M1 = 0;
CCP1CONbits.CCP1M0 = 0;
// ������255�ʕb�ɐݒ�iPR2 + 1�ʕb�j�~1/�i���쏈�����x���S�j
PR2 = 255; //PR2���W�X�^8bit0~255
// �f���[�e�B�[�T�C�N����0ms�ŏ�����
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}
// �^�C�}2�ݒ��
void InitTimer2(void) {
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1 = 0;
T2CONbits.T2CKPS0 = 0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON = 1;
}
�����ŁA�v���O�����^�ӂ�ɁA�@�@�A�����������܂����B
�T�O���́A�����N���b�N1Mhz�ɂ����̂ŁA
�P/1000000�@���@1�T�C�N�����Ԃ́A1�ʂ���1000����
�T�O���Ȃ�A500����
�������琄���Ȃ̂ł����A
�T�O���ɂ������Ȃ�A�b�b�o�q1�k��500�ł����Ǝv���܂����B
�@���ł��傤���H
���w�E�肢�܂��B
�X�������肢���܂��B
/*�o�v�l�ɂ��RB3�ʼnϒ�R���䂵�ARB0���o�͒[�q*/
//RB7��SEC��|�[�g2��SL-13��1�ԃs���i�o�͒[�q�j����͒[�q�Ƃ��Ď�
//���̕\���𑀍�Ղ�LED��RA1���甭��������A�܂��A��Ղł�RA0����LED�ɂ�蔭��������
//PIC16F1827 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
// CONFIG1
#pragma config FOSC = INTOSC // Oscillator Selection (INTOSC oscillator: I/O function on CLKIN pin)
#pragma config WDTE = OFF // Watchdog Timer Enable (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable (PWRT enabled)
#pragma config MCLRE = OFF // MCLR Pin Function Select (MCLR/VPP pin function is digital input)
#pragma config CP = OFF // Flash Program Memory Code Protection (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Memory Code Protection (Data memory code protection is disabled)
#pragma config BOREN = ON // Brown-out Reset Enable (Brown-out Reset enabled)
#pragma config CLKOUTEN = OFF // Clock Out Enable (CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin)
#pragma config IESO = ON // Internal/External Switchover (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable (Fail-Safe Clock Monitor is enabled)
// CONFIG2
#pragma config WRT = OFF // Flash Memory Self-Write Protection (Write protection off)
#pragma config PLLEN = OFF // PLL Enable (4x PLL disabled)
#pragma config STVREN = OFF // Stack Overflow/Underflow Reset Enable (Stack Overflow or Underflow will not cause a Reset)
#pragma config BORV = LO // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (Vbor), low trip point selected.)
#pragma config LVP = OFF // Low-Voltage Programming Enable (High-voltage on MCLR/VPP must be used for programming)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
// �N���b�N���g���w��
// (__delay_ms()�����K�v�Ƃ��Ă��邽��)
#define _XTAL_FREQ 1000000
// �v���g�^�C�v�錾
void InitPWM(void);
void InitTimer2(void);
unsigned int adconv(void);
// ���C����
void main(void) {
OSCCON = 0b0110101; //�N���b�N���g����1MHz�ɐݒ�
PORTA = 0x00; //�S��Lo
PORTB = 0x00; //�S��Lo
ANSELA = 0b00000000; //�S�ăf�W�^��I/O�Ƃ���
ANSELB = 0b00001000; // �ϒ�R�̓d���ǂݍ��ݗp��RB3�̂݃A�i���O
// ���o�͐ݒ�
TRISA = 0b00000000; // RA�S�ďo��
TRISB = 0b00001000; //RB3 �ϒ�R�pADC�p���͒[�q
// AD�R���o�[�^�ݒ�
ADCON0 = 0b00100101; // �A�i���O�ϊ����ݒ�(AN9�@RB3����Ǎ���)
ADCON1 = 0b10010000; // �ǎ�l�͉E�AA/D�ϊ��N���b�N��FOSC/8�AVDD�����t�@�����X�Ƃ���
__delay_us(5); // �A�i���O�ϊ���ݒ肳���܂łƂ肠�����҂�
//�ϐ��錾
unsigned int num;//ADRESH�̒l
unsigned int duty;
// PWM���[�h�ݒ���̌Ăяo��
InitPWM();
// �^�C�}2�ݒ���̌Ăяo��
InitTimer2();
while (1) {
if(RB7==0){__delay_ms(10);break;}
LATA0=LATA1=RB7;//SEC��|�[�g2��SL-13��1�ԃs��
num = adconv(); // RB3�@9�ԃs��(AN9)���甼�Œ��R�̒l��ǂݍ���
�@ duty=500+num;//Duty��50������X�^�[�g
�A if(duty > 500){
CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
CCP1CONbits.DC1B = num & 0b11;
__delay_ms(10);}
}
}
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
temp = ADRESH; //
temp = (temp << 8) + ADRESL; //RA3�œǂݍ��l��temp�ɑ��
return temp; //�ǂݍ���temp��num�ɕԂ�
}
// PWM���[�h�ݒ��
void InitPWM(void) {
APFCON0bits.CCP1SEL = 1; // RB0�[�q���o�͒[�q�ɐݒ�
// CCP�̃��[�h��PWM���[�h�ɐݒ�
CCP1CONbits.CCP1M3 = 1;
CCP1CONbits.CCP1M2 = 1;
CCP1CONbits.CCP1M1 = 0;
CCP1CONbits.CCP1M0 = 0;
// ������255�ʕb�ɐݒ�iPR2 + 1�ʕb�j�~1/�i���쏈�����x���S�j
PR2 = 255; //PR2���W�X�^8bit0~255
// �f���[�e�B�[�T�C�N����0ms�ŏ�����
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}
// �^�C�}2�ݒ��
void InitTimer2(void) {
// �v���X�P�[���l��1�ɐݒ�
T2CONbits.T2CKPS1 = 0;
T2CONbits.T2CKPS0 = 0;
// TMR2���W�X�^���N���A
TMR2 = 0;
// �^�C�}2�N��
T2CONbits.TMR2ON = 1;
}
TR 2018/12/27(Thu) 21:33 Re: �^����p,���ԕ�
> ���̕ӂ̌��_�����Ƃ��Ǝv��������ł��B
���̂悤�ɁA�C�ɂ���Ȃ��������Ă����̂��ǂ��Ǝv���܂��B
> �{�����[���̓r���ŁA���[�^�[����~���܂�
����͒P���ɓ����o���ʒu�̖��ł���ˁH
�O�ɂ��������Ǝv���܂����ǁA�{�����[���ʒu��ADC�Ŏ擾���Ă���̂ł��Bduty����擾���Ă���̂ł͂���܂���B
�ŁA���̃{�����[���ʒu�֎��R��duty�������Â���Ηǂ��ł��B�������A�Œ�t�߂̓L�b�`���~�߂������ǂ��ł��B(duty��0��������PWM��~)
�~�߂Ȃ�����[�^�������Ȃ��Ă��d��������Ĕ��M���܂��B�Ȃ̂ŁA�{�����[����10���H�Ƃ���~�͈͂�����������ǂ��Ǝv���܂��B
���ǂݎ��͑S�͈͂��܂��B�Ƃ������A�ǂݎ��Ȃ���ǂ̈ʒu������܂���B
�c�}�~�ʒu��0-10���Œ�~�B�c�}�~�ʒu10�`100���̈ʒu�ŁA�g�p����Œ�̂�����Ɖ����炢��PWM�`100��PWM�݂����Ȋ����̊���t���ɂȂ�Ǝv���܂��B
�X�C�b�`�t�̃{�����[���Ȃ炿����ƈႤ�Ǝv���܂��B
> �@ duty=500+num;//Duty��50������X�^�[�g
> �A if(duty > 500){
> CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> CCP1CONbits.DC1B = num & 0b11;
> __delay_ms(10);}
> }
�A��if���Ȃ̂�����Ȃ��ł��Bnum��0�̏ꍇ�����O�������̂Ȃ���������͈͂��m�ۂ��������ǂ��ł��B
�e�X�^�[�œd���𑪂�Δ���Ǝv���܂����ǁA��ԉ��̌��͂��傭���傭�����܂��B
�����āA���̃R�[�h���Əオ������H�i�������ӂ��j�̂ł����Ɗ����ō��킹�Ȃ���Αʖڂł��B
���̂悤�ɁA�C�ɂ���Ȃ��������Ă����̂��ǂ��Ǝv���܂��B
> �{�����[���̓r���ŁA���[�^�[����~���܂�
����͒P���ɓ����o���ʒu�̖��ł���ˁH
�O�ɂ��������Ǝv���܂����ǁA�{�����[���ʒu��ADC�Ŏ擾���Ă���̂ł��Bduty����擾���Ă���̂ł͂���܂���B
�ŁA���̃{�����[���ʒu�֎��R��duty�������Â���Ηǂ��ł��B�������A�Œ�t�߂̓L�b�`���~�߂������ǂ��ł��B(duty��0��������PWM��~)
�~�߂Ȃ�����[�^�������Ȃ��Ă��d��������Ĕ��M���܂��B�Ȃ̂ŁA�{�����[����10���H�Ƃ���~�͈͂�����������ǂ��Ǝv���܂��B
���ǂݎ��͑S�͈͂��܂��B�Ƃ������A�ǂݎ��Ȃ���ǂ̈ʒu������܂���B
�c�}�~�ʒu��0-10���Œ�~�B�c�}�~�ʒu10�`100���̈ʒu�ŁA�g�p����Œ�̂�����Ɖ����炢��PWM�`100��PWM�݂����Ȋ����̊���t���ɂȂ�Ǝv���܂��B
�X�C�b�`�t�̃{�����[���Ȃ炿����ƈႤ�Ǝv���܂��B
> �@ duty=500+num;//Duty��50������X�^�[�g
> �A if(duty > 500){
> CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> CCP1CONbits.DC1B = num & 0b11;
> __delay_ms(10);}
> }
�A��if���Ȃ̂�����Ȃ��ł��Bnum��0�̏ꍇ�����O�������̂Ȃ���������͈͂��m�ۂ��������ǂ��ł��B
�e�X�^�[�œd���𑪂�Δ���Ǝv���܂����ǁA��ԉ��̌��͂��傭���傭�����܂��B
�����āA���̃R�[�h���Əオ������H�i�������ӂ��j�̂ł����Ɗ����ō��킹�Ȃ���Αʖڂł��B
�ҋ����b�N 2018/12/27(Thu) 22:14 No.1378 Re: �^����p,���ԕ�
�ҋ����b�N����A�L��������܂��B
>���ǂݎ��͑S�͈͂��܂��B�Ƃ������A�ǂݎ��Ȃ���ǂ̈ʒu������܂���B
�c�}�~�ʒu��0-10���Œ�~�B�c�}�~�ʒu10�`100���̈ʒu�ŁA�g�p����Œ�̂�����Ɖ����炢��PWM�`100��PWM�݂����Ȋ����̊���t���ɂȂ�Ǝv���܂��B
�X�C�b�`�t�̃{�����[���Ȃ炿����ƈႤ�Ǝv���܂��B
�ȉ��̕������A�d���ǂݎ��̕����ł����A�@�`�F�̊ԂōH����Ƃ������Ƃł��傤���H
���P�������_�́A���݁A�{�����[�����O�`�T�O���ɕ����ł͓��삵�Ȃ��̂ŁA
�T�O�����瓮��J�n�Ƃ������ł��B
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
�@ unsigned int adconv() {
�A unsigned int temp;
�B GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
�C while (GO_nDONE); // �ǎ�芮���܂ő҂�
�D temp = ADRESH; //
�E temp = (temp << 8) + ADRESL; //RA3�œǂݍ��l��temp�ɑ��
�F return temp; //�ǂݍ���temp��num�ɕԂ�
}
>���ǂݎ��͑S�͈͂��܂��B�Ƃ������A�ǂݎ��Ȃ���ǂ̈ʒu������܂���B
�c�}�~�ʒu��0-10���Œ�~�B�c�}�~�ʒu10�`100���̈ʒu�ŁA�g�p����Œ�̂�����Ɖ����炢��PWM�`100��PWM�݂����Ȋ����̊���t���ɂȂ�Ǝv���܂��B
�X�C�b�`�t�̃{�����[���Ȃ炿����ƈႤ�Ǝv���܂��B
�ȉ��̕������A�d���ǂݎ��̕����ł����A�@�`�F�̊ԂōH����Ƃ������Ƃł��傤���H
���P�������_�́A���݁A�{�����[�����O�`�T�O���ɕ����ł͓��삵�Ȃ��̂ŁA
�T�O�����瓮��J�n�Ƃ������ł��B
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
�@ unsigned int adconv() {
�A unsigned int temp;
�B GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
�C while (GO_nDONE); // �ǎ�芮���܂ő҂�
�D temp = ADRESH; //
�E temp = (temp << 8) + ADRESL; //RA3�œǂݍ��l��temp�ɑ��
�F return temp; //�ǂݍ���temp��num�ɕԂ�
}
TR 2018/12/28(Fri) 05:52 Re: �^����p,���ԕ�
AD�ϊ��̃v���O�����̓��A�@��lj�������A
�{�����[���O�ł��A�����Ȃ�d�����o�Ă悭�Ȃ����̂ł����A
�s����ł��B�R�C�Q�u
�{�����[���������̂��ȁ`�A�v���O�������ȁ`�A�ǂ��������̂�������܂��H
�F�l���X�������肢���܂��B
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
�@ if(ADRES > 300 ) {
temp = ADRESH; //���8bit
temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
return temp;} //�ǂݍ���temp��num�ɕԂ�
}
�{�����[���O�ł��A�����Ȃ�d�����o�Ă悭�Ȃ����̂ł����A
�s����ł��B�R�C�Q�u
�{�����[���������̂��ȁ`�A�v���O�������ȁ`�A�ǂ��������̂�������܂��H
�F�l���X�������肢���܂��B
// �A�i���O�l�̕ϊ��ƓǍ��ݏ�����
unsigned int adconv() {
unsigned int temp;
GO_nDONE = 1; // �A�i���O�l�ǎ��J�n�w��
while (GO_nDONE); // �ǎ�芮���܂ő҂�
�@ if(ADRES > 300 ) {
temp = ADRESH; //���8bit
temp = (temp << 8) + ADRESL; //RB3��RB4�œǂݍ��l��temp�ɑ��
return temp;} //�ǂݍ���temp��num�ɕԂ�
}
TR 2018/12/28(Fri) 13:32 Re: �^����p,���ԕ�
����Ȋ�������Ȃ����Ǝv���܂��B
No.1377�̇@�A�̕����ɓ���Ă��������B
��ADC�̒l��50�ȏ�œ���B�o��500�i/1023�j����B
if(num<50){
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}else{
num=(num-50)*(1023-500)/(1023-50)+500;
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
}
No.1377�̇@�A�̕����ɓ���Ă��������B
��ADC�̒l��50�ȏ�œ���B�o��500�i/1023�j����B
if(num<50){
CCPR1L = 0;
CCP1CONbits.DC1B = 0;
}else{
num=(num-50)*(1023-500)/(1023-50)+500;
CCPR1L =num>>2 ;
CCP1CONbits.DC1B = num&3;
}
�ҋ����b�N 2018/12/28(Fri) 21:27 No.1381 Re: �^����p,���ԕ�
�ҋ����b�N����ʖڂł��B
�r������2.2�u�ʏo�Ă��̂܂܁A�قڈ��ł��B
�܂��A�m��1380�̕����ǂ��ł��B
�E���オ��ŁA1.4�u�`��4.2�u�ł܂��B
�r������2.2�u�ʏo�Ă��̂܂܁A�قڈ��ł��B
�܂��A�m��1380�̕����ǂ��ł��B
�E���オ��ŁA1.4�u�`��4.2�u�ł܂��B
TR 2018/12/28(Fri) 22:10 Re: �^����p,���ԕ�
> �@ duty=500+num;//Duty��50������X�^�[�g
> �A if(duty > 500){
> CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> CCP1CONbits.DC1B = num & 0b11;
�����Ɓ��̂S�s���ɕς��܂������H
�ǐL
�����A���������ӂ�ł��ˁB
num=(num-50.0)*(1023-500)/(1023-50)+500;
�łǂ��ł��傤�H
> �A if(duty > 500){
> CCPR1L = num / 4; // �A�i���O�l����̃f�[�^�Ńf���[�e�B�l��ݒ�
> CCP1CONbits.DC1B = num & 0b11;
�����Ɓ��̂S�s���ɕς��܂������H
�ǐL
�����A���������ӂ�ł��ˁB
num=(num-50.0)*(1023-500)/(1023-50)+500;
�łǂ��ł��傤�H
�ҋ����b�N 2018/12/28(Fri) 22:20 No.1383 Re: �^����p,���ԕ�
�s�q����C�ҋ����b�N����C�����́B
�s�q����C���낢�낪����Ă��܂��ˁB
�ҋ����b�N����C�����I�Ȏ���ł����ǁC
�o�v�l�̐���Ɏg���ϒ�R�C�`�J�[�u�Ƃa�J�[�u�̂��́C
�ǂ��炪�����̂ł��傤���ˁB
�k�d�c�̖��邳�Ƃ��ł͂Ȃ��̂ŁC���ʂ`�J�[�u�̂���
�̕��������̂ł��傤���ˁB
����Ƃo�v�l�̐���ŁC��]���i�K�ɕύX��������C
�ϒ�R�̓ǂݎ����C���炩���ߍ쐬���Ă������e�[�u����
���������āC�U�������߂�C�Ȃ�Ă������@�͂ǂ��Ȃ�ł��傤���B
�v���O�������ώG�ɂȂ邩�Ȃ��E�E�E�E�E�B
�s�q����C���낢�낪����Ă��܂��ˁB
�ҋ����b�N����C�����I�Ȏ���ł����ǁC
�o�v�l�̐���Ɏg���ϒ�R�C�`�J�[�u�Ƃa�J�[�u�̂��́C
�ǂ��炪�����̂ł��傤���ˁB
�k�d�c�̖��邳�Ƃ��ł͂Ȃ��̂ŁC���ʂ`�J�[�u�̂���
�̕��������̂ł��傤���ˁB
����Ƃo�v�l�̐���ŁC��]���i�K�ɕύX��������C
�ϒ�R�̓ǂݎ����C���炩���ߍ쐬���Ă������e�[�u����
���������āC�U�������߂�C�Ȃ�Ă������@�͂ǂ��Ȃ�ł��傤���B
�v���O�������ώG�ɂȂ邩�Ȃ��E�E�E�E�E�B
mabo 2018/12/29(Sat) 00:43 No.1384 ���䕪�ɂ���
�F�����́B
mabo����A�ȑO�A
�Z���N�^�[SW���g���āA3���̑I����A1/10�����A1/100�����̑I�����ł���v���O�������܂��āA
���Ӑ\���グ�܂��B
�����̒������v���O�����́A�����ł����A�ȉ��̒ʂ�ł��B
�v���O�����߂Ă��Ďv�����_������܂��B
IF���̏������ɂ��Ăł��B
�������f�������ʂ�^�U�l�Ƃ����̂������ł��B
�����́A�P��0�̂ǂ��炩�ŁA1���^�A0���U�������ł��B
�����v���āA�v���O����������ƁA
mabo����̃v���O�����́A
if (�������P) {
�����P
} else if (�������Q) {
���ꂪ�g���Ă��܂��B
�Z���N�^�[SW�̏ꍇ�A�����܂ŁA���G�ɂ��Ȃ��Ă������Ǝv���̂ł����������ł��傤���H
�P���O�����ł���A
�����ƒP����
if (������) {
��������������Ƃ��̏����`
} else {
�������������Ȃ��Ƃ��̏����a
}
���̂悤�Ȋ����ł������Ǝv���̂ł����A�@���ł��傤���H
���C�����������Ȃ��ł��������B
�����̃��x�����グ������S�ł��B
�X�������肢���܂��B
�����A�����������v���O�����͍����劈������Ă��܂��B
// ���C����
void main (void){
// 1,2,17,18�[�q����o�͒[�q�ɐݒ�
CMCON = 0x07;
// �d�����x���̏����ݒ�
PORTA = 0x00;
PORTB = 0x00;
// ���o�͐ݒ�
TRISA = 0b11111111;//�S������
TRISB = 0b10000000;//�S���o��
//int �^�� sw �Ƃ����ϐ���錾
int sw0;
int sw1;
int sw2;
int sw3;
int sw4;
int sw5;
int sw6;
// �i�v���[�v
while(1){
//RA0*****************************
if(RA0 == 0){
WaitTime (500);// �҂����Ԋ��̌Ăяo
if(RA0 == 0){//������x�m�F����B
//PORTB=0x00;
RB0 = 1;// LED1�_��
sw0=1;//�X�C�b�`�������ꂽ
}
}
else {
WaitTime (500);// �҂����Ԋ��̌Ăяo���i��10m�b�F�`���^�����O��j
if(sw0==1 && RB0==1){
RB0 = 0;// LED1����
sw0=0;
}
}
�ȉ��A��L�Ɠ����悤��RA1�APR2�`�@���`���ƁA���䕶������ł��܂��B
mabo����A�ȑO�A
�Z���N�^�[SW���g���āA3���̑I����A1/10�����A1/100�����̑I�����ł���v���O�������܂��āA
���Ӑ\���グ�܂��B
�����̒������v���O�����́A�����ł����A�ȉ��̒ʂ�ł��B
�v���O�����߂Ă��Ďv�����_������܂��B
IF���̏������ɂ��Ăł��B
�������f�������ʂ�^�U�l�Ƃ����̂������ł��B
�����́A�P��0�̂ǂ��炩�ŁA1���^�A0���U�������ł��B
�����v���āA�v���O����������ƁA
mabo����̃v���O�����́A
if (�������P) {
�����P
} else if (�������Q) {
���ꂪ�g���Ă��܂��B
�Z���N�^�[SW�̏ꍇ�A�����܂ŁA���G�ɂ��Ȃ��Ă������Ǝv���̂ł����������ł��傤���H
�P���O�����ł���A
�����ƒP����
if (������) {
��������������Ƃ��̏����`
} else {
�������������Ȃ��Ƃ��̏����a
}
���̂悤�Ȋ����ł������Ǝv���̂ł����A�@���ł��傤���H
���C�����������Ȃ��ł��������B
�����̃��x�����グ������S�ł��B
�X�������肢���܂��B
�����A�����������v���O�����͍����劈������Ă��܂��B
// ���C����
void main (void){
// 1,2,17,18�[�q����o�͒[�q�ɐݒ�
CMCON = 0x07;
// �d�����x���̏����ݒ�
PORTA = 0x00;
PORTB = 0x00;
// ���o�͐ݒ�
TRISA = 0b11111111;//�S������
TRISB = 0b10000000;//�S���o��
//int �^�� sw �Ƃ����ϐ���錾
int sw0;
int sw1;
int sw2;
int sw3;
int sw4;
int sw5;
int sw6;
// �i�v���[�v
while(1){
//RA0*****************************
if(RA0 == 0){
WaitTime (500);// �҂����Ԋ��̌Ăяo
if(RA0 == 0){//������x�m�F����B
//PORTB=0x00;
RB0 = 1;// LED1�_��
sw0=1;//�X�C�b�`�������ꂽ
}
}
else {
WaitTime (500);// �҂����Ԋ��̌Ăяo���i��10m�b�F�`���^�����O��j
if(sw0==1 && RB0==1){
RB0 = 0;// LED1����
sw0=0;
}
}
�ȉ��A��L�Ɠ����悤��RA1�APR2�`�@���`���ƁA���䕶������ł��܂��B
TR 2018/12/20(Thu) 20:13 Re: ���䕪�ɂ���
�s�q����C�����́B
>�Z���N�^�[SW�̏ꍇ�A�����܂ŁA���G�ɂ��Ȃ��Ă������Ǝv���̂ł����������ł��傤���H
�Ȃ�����ȃv���O�����ɂ����̂��C�Y��Ă��镔��������̂ł����C
while(1)�̂Ȃ��ŁC�������f�Ə��������Ă܂��̂ŁC
�����������Q�Ȃ����߂ƃ`���^�����O��̂��߂��ȁC
�Ǝv���o���Ă܂��B
else�̂Ȃ��ŁC
if(sw0==1 && RB0==1){
RB0 = 0;// LED1����
sw0=0;
�Ƃ��Ă���̂́C�X�C�b�`��������ĂȂ����ɁC
�����LED���������������̂�����邽�߂��Ǝv���܂��B
LED����������́CLED��ON�̎�������������̂ŁC
����ȕ\�������̂�������܂�����B
�����Celse�@�̂Ȃ��ł̏����ł��̂ŁC
if(sw0==1 && RB0==1)
����Ȃ��āC
if(RB0==1)
�ł��C�\�������������ł��ˁB
���̂Ȃ��ł́C�d���������̂ɁC�����Ă���ɂ�������炸�C
�����OFF�̃X�C�b�`�������̂��C�D�݂łȂ��悤�ł��B
�����C���ʓI�ɂ́C���܂�ς��Ȃ��Ǝv���܂��B
����ƁC���̎v�l�����������Ȃ̂��C
�l����������̑g�ݍ��킹���C
���Ȃ��ƋC���ς܂Ȃ��悤�ȂƂ��낪����܂��B
���̂����C�̐S�̂Ƃ��낪��������ŁC��J����̂ł����E�E�E�E�E�E�i�j�B
�����C�s�q����̂��������悤�ɁC���܂肢���v���O�����ł́C�Ȃ��ł��ˁB
�ҋ����b�N����ɂ������C���w�E���Ǝv���܂����ǁC
WaitTime (500);���g���ă`���^�����O��h�~���悤�Ƃ��Ă܂��̂ŁC
���̊ԁC�����ł��Ȃ����ƂɂȂ�܂��B
���荞�ݓ����g���āC���f���������悩������������܂���ˁB
>�Z���N�^�[SW�̏ꍇ�A�����܂ŁA���G�ɂ��Ȃ��Ă������Ǝv���̂ł����������ł��傤���H
�Ȃ�����ȃv���O�����ɂ����̂��C�Y��Ă��镔��������̂ł����C
while(1)�̂Ȃ��ŁC�������f�Ə��������Ă܂��̂ŁC
�����������Q�Ȃ����߂ƃ`���^�����O��̂��߂��ȁC
�Ǝv���o���Ă܂��B
else�̂Ȃ��ŁC
if(sw0==1 && RB0==1){
RB0 = 0;// LED1����
sw0=0;
�Ƃ��Ă���̂́C�X�C�b�`��������ĂȂ����ɁC
�����LED���������������̂�����邽�߂��Ǝv���܂��B
LED����������́CLED��ON�̎�������������̂ŁC
����ȕ\�������̂�������܂�����B
�����Celse�@�̂Ȃ��ł̏����ł��̂ŁC
if(sw0==1 && RB0==1)
����Ȃ��āC
if(RB0==1)
�ł��C�\�������������ł��ˁB
���̂Ȃ��ł́C�d���������̂ɁC�����Ă���ɂ�������炸�C
�����OFF�̃X�C�b�`�������̂��C�D�݂łȂ��悤�ł��B
�����C���ʓI�ɂ́C���܂�ς��Ȃ��Ǝv���܂��B
����ƁC���̎v�l�����������Ȃ̂��C
�l����������̑g�ݍ��킹���C
���Ȃ��ƋC���ς܂Ȃ��悤�ȂƂ��낪����܂��B
���̂����C�̐S�̂Ƃ��낪��������ŁC��J����̂ł����E�E�E�E�E�E�i�j�B
�����C�s�q����̂��������悤�ɁC���܂肢���v���O�����ł́C�Ȃ��ł��ˁB
�ҋ����b�N����ɂ������C���w�E���Ǝv���܂����ǁC
WaitTime (500);���g���ă`���^�����O��h�~���悤�Ƃ��Ă܂��̂ŁC
���̊ԁC�����ł��Ȃ����ƂɂȂ�܂��B
���荞�ݓ����g���āC���f���������悩������������܂���ˁB
mabo 2018/12/20(Thu) 23:55 No.1353 Re: ���䕪�ɂ���
> �����v���āA�v���O����������ƁA
> mabo����̃v���O�����́A
> if (�������P) {
> �����P
> } else if (�������Q) {
> ���ꂪ�g���Ă��܂��B
�ǂ����Ă��A�g���Ă��Ȃ��̂ł����ǁA�㔼���̃v���O�����́ATR���ύX������̂��̂ł��傤���H
> �Z���N�^�[SW�̏ꍇ�A�����܂ŁA���G�ɂ��Ȃ��Ă������Ǝv���̂ł����������ł��傤���H
>
> �P���O�����ł���A
> �����ƒP����
> if (������) {
> ��������������Ƃ��̏����`
> } else {
> �������������Ȃ��Ƃ��̏����a
> }�B
�Z���N�^�X�C�b�`�Ȃ�Αʖڂł��B
if(1�Ԃ�ON�Ȃ�j�I��ԍ�=1;
else if(2�Ԃ�ON�Ȃ�j�I��ԍ�=2;
else if(3�Ԃ�ON�Ȃ�j�I��ԍ�=3;
else if(4�Ԃ�ON�Ȃ�j�I��ԍ�=4;
�̂悤�ȏ����ɂȂ�܂��B�������͐^���U�Ŕ��f����܂����ǁA�s����������2���Ŕ��f�ł���킯�ł͂���܂���B
�ܘ_�A�u�X�C�b�`�������ꂽ��v�̋t�́u�X�C�b�`��������Ă��Ȃ��v�Ȃ̂ŁA�����������u����ȊO�v�Ƃ������f�ŏ[���Ȃ�
�uelse�v�݂̂ɂȂ�܂��B
�ŁA���̃v���O�����̓��e�I�ɂ́A�|�[�gA��SW�A�|�[�gB��LED�ŁA������Ă��鎞�́`�A�Ƃ����v���O�����ł��ˁB
�ƂȂ�ƁA��{�I�ɂ̓`���^�����O��͕s�v�ł��B
��ԃV���v���Ȃ̂�
while(1){
PORTB=(PORTB&0x80)|(~PORTA&0x7F);
__delay_ms(1);//�����Ă��ǂ�
}
�ł��B�����I�ɂ͈�ԑ����A�����I�ł��B�������A����Ă��Ȃ��Ǝg���ɂ����ł��B
�Ȃ̂ŁA
while(1){
RB0=!RA0;
RB1=!RA1;
RB2=!RA2;
RB3=!RA3;
RB4=!RA4;
RB5=!RA5;
RB6=!RA6;
}
�ƕ��ׂ������ǂ���������܂���B
�������ALAT���W�X�^���g��Ȃ��ƌ듮�삷�邩������܂���B
> mabo����̃v���O�����́A
> if (�������P) {
> �����P
> } else if (�������Q) {
> ���ꂪ�g���Ă��܂��B
�ǂ����Ă��A�g���Ă��Ȃ��̂ł����ǁA�㔼���̃v���O�����́ATR���ύX������̂��̂ł��傤���H
> �Z���N�^�[SW�̏ꍇ�A�����܂ŁA���G�ɂ��Ȃ��Ă������Ǝv���̂ł����������ł��傤���H
>
> �P���O�����ł���A
> �����ƒP����
> if (������) {
> ��������������Ƃ��̏����`
> } else {
> �������������Ȃ��Ƃ��̏����a
> }�B
�Z���N�^�X�C�b�`�Ȃ�Αʖڂł��B
if(1�Ԃ�ON�Ȃ�j�I��ԍ�=1;
else if(2�Ԃ�ON�Ȃ�j�I��ԍ�=2;
else if(3�Ԃ�ON�Ȃ�j�I��ԍ�=3;
else if(4�Ԃ�ON�Ȃ�j�I��ԍ�=4;
�̂悤�ȏ����ɂȂ�܂��B�������͐^���U�Ŕ��f����܂����ǁA�s����������2���Ŕ��f�ł���킯�ł͂���܂���B
�ܘ_�A�u�X�C�b�`�������ꂽ��v�̋t�́u�X�C�b�`��������Ă��Ȃ��v�Ȃ̂ŁA�����������u����ȊO�v�Ƃ������f�ŏ[���Ȃ�
�uelse�v�݂̂ɂȂ�܂��B
�ŁA���̃v���O�����̓��e�I�ɂ́A�|�[�gA��SW�A�|�[�gB��LED�ŁA������Ă��鎞�́`�A�Ƃ����v���O�����ł��ˁB
�ƂȂ�ƁA��{�I�ɂ̓`���^�����O��͕s�v�ł��B
��ԃV���v���Ȃ̂�
while(1){
PORTB=(PORTB&0x80)|(~PORTA&0x7F);
__delay_ms(1);//�����Ă��ǂ�
}
�ł��B�����I�ɂ͈�ԑ����A�����I�ł��B�������A����Ă��Ȃ��Ǝg���ɂ����ł��B
�Ȃ̂ŁA
while(1){
RB0=!RA0;
RB1=!RA1;
RB2=!RA2;
RB3=!RA3;
RB4=!RA4;
RB5=!RA5;
RB6=!RA6;
}
�ƕ��ׂ������ǂ���������܂���B
�������ALAT���W�X�^���g��Ȃ��ƌ듮�삷�邩������܂���B
�ҋ����b�N 2018/12/21(Fri) 12:41 No.1354 Re: ���䕪�ɂ���
�ς��悤�Ƃ��Ă���r���̂��̂ł����B
�������͈ȉ��̒ʂ�ł��B
// �i�v���[�v
while(1){
//RA0*****************************
if(RA0 == 0){
WaitTime (500);// �҂����Ԋ��̌Ăяo
if(RA0 == 0){//������x�m�F����B
//PORTB=0x00;
RB0 = 1;// LED1�_��
sw0=1;//�X�C�b�`�������ꂽ
}
}
else {
WaitTime (500);// �҂����Ԋ��̌Ăяo���i��10m�b�F�`���^�����O��j
if(sw0==1 && RB0==1){
RB0 = 0;// LED1����
sw0=0;
}
}
�ҋ����b�N����̕ς����v���O�����ł����A
�ߓ��A�����ĉ��������ł��ˁB�v���o���܂����B
B�]��A�ɑ������Ӗ��ł����B
����͂����ł��ˁI
�ł��悭����ƁA�����L��������܂��ˁB
��r���Z�q
A�I��B
A��B�͓������Ȃ��B
�ҋ����b�N����̃v���O�������L�^���Ă����āA���s�v���O�����ς�PIC16F627A�̕s���̏o�����ɔ��������Ǝv���܂��B
���́A�Ȃ�ŁA�����������������Ă������Ƃ����ƁA
1/100�����̃��j�^�[�pLED���_�����Ȃ��Ȃ�܂����B
�ŁA��Ղ�������ł���A�ܘ_�A�v���O�����ς�PIC��������m�F���܂����B
�܁`�A�����́A�f���ł����B
�ł��A���삵�Đ����ł����ƁA���Â��v���܂����B
�����i�ł�����A�������x���ł́A�����ւ��ł��B
�ł��A����Ȃ̂ŁA�����ׂ��܂�����ˁB
�ʐ^�́A���@�Ɏg�p���̃Z���N�^�[SW�ł��B
�NjL
16F88�̏ꍇ�ALATA���ƁA�G���[���N�����܂��B
ANS0�Ƃ����L�ڂȂ�OK�ł����A�@���ł��傤���H
TR 2018/12/21(Fri) 18:44 Re: ���䕪�ɂ���
88��LAT���W�X�^���Ȃ������ł��ˁB
TR 2018/12/21(Fri) 21:30 Re: ���䕪�ɂ���
�s�q����C�ҋ����b�N����C�����́B
�ҋ����b�N����C���ς�炸�C�K�ȃA�h�o�C�X���肪�Ƃ��������܂��B
�s�q����C�P�U�e�W�W�́C�k�`�s���W�X�^�Ȃ��Ǝv���܂��B
�ł��̂ŁC�����G���[�ɂȂ�悤�Ȃ�C�ԂɃA�Z���u���ŁC
������������Ă������悤�ł��B
�@asm("nop");���������Ȃ��x�݂̎��Ԃł��B
�ԂɁC
�@__delay_ms(1)�G
�ł����������ł��ˁB
����ƈȑO�|�[�g�����ꂼ��ɑ��삵�āC
�v�������ʂ��łȂ����Ƃ�����܂����B
�@RA0=1;
�͂܂Ƃ��ɂ������Ȃ��āC
�@PORTA=0b00000001�G
�̂悤�ɏ�������܂Ƃ��ɓ��������Ƃ�����܂��B
�ҋ����b�N����C���ς�炸�C�K�ȃA�h�o�C�X���肪�Ƃ��������܂��B
�s�q����C�P�U�e�W�W�́C�k�`�s���W�X�^�Ȃ��Ǝv���܂��B
�ł��̂ŁC�����G���[�ɂȂ�悤�Ȃ�C�ԂɃA�Z���u���ŁC
������������Ă������悤�ł��B
�@asm("nop");���������Ȃ��x�݂̎��Ԃł��B
�ԂɁC
�@__delay_ms(1)�G
�ł����������ł��ˁB
����ƈȑO�|�[�g�����ꂼ��ɑ��삵�āC
�v�������ʂ��łȂ����Ƃ�����܂����B
�@RA0=1;
�͂܂Ƃ��ɂ������Ȃ��āC
�@PORTA=0b00000001�G
�̂悤�ɏ�������܂Ƃ��ɓ��������Ƃ�����܂��B
mabo 2018/12/21(Fri) 23:33 No.1357 Re: ���䕪�ɂ���
mabo����A�ҋ����b�N�����́B
��__delay_ms(1)�G
�C�������Ċ����Ȃ�ł��傤���H
�ŁA�f�l�l���ł����A
�Z���N�^SW�̏ꍇ�A�`���^�����O���s�v�Ƃ������ƁB
88�ɁA�f�W�^���p�o�͂Ƃ��āALAT���W�X�^���Ȃ��Ƃ�����A
RB6�Ƃ����Ă�������Ȃ����Ǝv���܂��B
���ꂾ���A88�̓��쑬�x���A�ŐV�^�ɂ���LAT���W�X�^��K�v�Ƃ���قǁA�����Ȃ����Ă������Ƃ��Ɛ������܂��B
�l�b�g�������Ă��܂��A�͂�����Ƃ͂��܂���B
��__delay_ms(1)�G
�C�������Ċ����Ȃ�ł��傤���H
�ŁA�f�l�l���ł����A
�Z���N�^SW�̏ꍇ�A�`���^�����O���s�v�Ƃ������ƁB
88�ɁA�f�W�^���p�o�͂Ƃ��āALAT���W�X�^���Ȃ��Ƃ�����A
RB6�Ƃ����Ă�������Ȃ����Ǝv���܂��B
���ꂾ���A88�̓��쑬�x���A�ŐV�^�ɂ���LAT���W�X�^��K�v�Ƃ���قǁA�����Ȃ����Ă������Ƃ��Ɛ������܂��B
�l�b�g�������Ă��܂��A�͂�����Ƃ͂��܂���B
TR 2018/12/22(Sat) 18:30 Re: ���䕪�ɂ���
�s�q����C�ҋ����b�N�����́B
�����悭������Ȃ��Ƃ��날��̂ł����C
�v�́C���W�X�^�[�̘A����������������ꍇ�C�s����N����\��������C�Ƃ������Ƃ��Ǝv���܂��B
��RB6�Ƃ����Ă�������Ȃ����Ǝv���܂��B
�P�U�e�W�W�̏ꍇ�C�k�`�s���W�X�^����܂���̂ŁC���܂ł̃��W�X�^���g�����ƂɂȂ�܂����ǁC
while(1){
RB0=!RA0;
RB1=!RA1;
RB2=!RA2;
RB3=!RA3;
RB4=!RA4;
RB5=!RA5;
RB6=!RA6;
}
�̂悤�ɁC�A�����āC���W�X�^���g���Ƃ��߂ȏꍇ������C
�Ƃ������Ƃ��Ǝv���܂��B
�����N���b�N�����g�p�̏ꍇ�́C�e���́C���Ȃ���������܂��C
�O���N���b�N�����g���āC�N���b�N��������Ƃ��̉\���傾�Ǝv���܂��B
���̍ۂ́C
while(1){
RB0=!RA0;
asm("nop");�i�S�l�g���̏ꍇ�P��s�j
RB1=!RA1;
asm("nop");
RB2=!RA2;
asm("nop");
RB3=!RA3;
asm("nop");
RB4=!RA4;
asm("nop");
RB5=!RA5;
asm("nop");
RB6=!RA6;
}
�̂悤�ɂ��������ŁC���܂��������Ƃ������ƌo�����Ă܂��B
asm("nop");
�́C�����N���b�N�҂Ƃ������Ƃł��́C
�i���ꐳ�m�ɂ͊ԈႢ�ł��ˁB�m�n�o�͉������Ȃ��Ƃ������߂ł��̂ŁB�j�������������NjL
�@__delay_ms(1)�G
���ꡂ��ɒZ�����Ԃł��B
�����悭������Ȃ��Ƃ��날��̂ł����C
�v�́C���W�X�^�[�̘A����������������ꍇ�C�s����N����\��������C�Ƃ������Ƃ��Ǝv���܂��B
��RB6�Ƃ����Ă�������Ȃ����Ǝv���܂��B
�P�U�e�W�W�̏ꍇ�C�k�`�s���W�X�^����܂���̂ŁC���܂ł̃��W�X�^���g�����ƂɂȂ�܂����ǁC
while(1){
RB0=!RA0;
RB1=!RA1;
RB2=!RA2;
RB3=!RA3;
RB4=!RA4;
RB5=!RA5;
RB6=!RA6;
}
�̂悤�ɁC�A�����āC���W�X�^���g���Ƃ��߂ȏꍇ������C
�Ƃ������Ƃ��Ǝv���܂��B
�����N���b�N�����g�p�̏ꍇ�́C�e���́C���Ȃ���������܂��C
�O���N���b�N�����g���āC�N���b�N��������Ƃ��̉\���傾�Ǝv���܂��B
���̍ۂ́C
while(1){
RB0=!RA0;
asm("nop");�i�S�l�g���̏ꍇ�P��s�j
RB1=!RA1;
asm("nop");
RB2=!RA2;
asm("nop");
RB3=!RA3;
asm("nop");
RB4=!RA4;
asm("nop");
RB5=!RA5;
asm("nop");
RB6=!RA6;
}
�̂悤�ɂ��������ŁC���܂��������Ƃ������ƌo�����Ă܂��B
asm("nop");
�́C�����N���b�N�҂Ƃ������Ƃł��́C
�i���ꐳ�m�ɂ͊ԈႢ�ł��ˁB�m�n�o�͉������Ȃ��Ƃ������߂ł��̂ŁB�j�������������NjL
�@__delay_ms(1)�G
���ꡂ��ɒZ�����Ԃł��B
mabo 2018/12/22(Sat) 22:56 No.1359 Re: ���䕪�ɂ���
> �Z���N�^SW�̏ꍇ�A�`���^�����O���s�v�Ƃ�������
���������A�Z���N�^SW���̂ɂ̓`���^�����O�ȊO�ɁA�V���[�e�B���O/�m�[�V���[�e�B���O�^�C�v�̖�������܂�����
����ł��B
�A���A�u�{�^���������Ă���Ԃ́`�v�Ƃ������������藧���܂��B
LED���x���̐�ւ��Ȃ�A�m�C�Y�ɂ��듮����C�Â��Ȃ������ɒʂ�߂��Č��ɖ߂�܂������͕s�v�ł��B
����ǂ��A���̃Z���N�^�X�C�b�`���傫�ȃV�X�e���̕ύX�Ȃ�A�����Ƒׂ��ł��B
> 88�̓��쑬�x���A�ŐV�^�ɂ���LAT���W�X�^��K�v�Ƃ���قǁA�����Ȃ����Ă������Ƃ��Ɛ������܂��B
�ǂ̈ʂ̑��x����듮�������̂��͔���܂��ǁA�ǂ̃f�o�C�X�ł��x���������Ζ��͔������܂���B
�܂��ALAT���W�X�^�����݂��Ȃ��f�o�C�X�ł����̖��͋N���蓾�܂��B
�ŋ߂̓d�q�H����A����Ȃ�̔\�͂������ƃf�o�C�X�𐧌�o���܂���B
�Ⴆ�A�ŋߐl�C�̃}�C�R������LED�i�l�I�s�N�Z���jWS2812B���̐����F88������ł͖����ł��B
F1827�ł����Ȃ肫���Ǝv���܂��i�ł��A�œK�Ȓl��������Α��������j�BUNO��PIC18(16MIPS)�łȂ�Ƃ��i���Ńv���O��������Γ����j�A�Ƃ������x�����Ǝv���܂��B
�ܘ_�AF88��F1827�ł��命���̂��̂͐���\�ł����ǁA���オ�i�ނɂ�A���Ӄf�o�C�X���ω����Ă����܂�����A
����ƈ����Ȃ����̂̊����������邱�ƂɂȂ�܂��B
> __delay_ms(1)�G
__delay_us(1)�ŏ[���ł��傤�ˁB
�O�q��LED�͉��̊����̐���ɂȂ�܂��B
���͈̔͂ɐ��䂷��̂͂�����x�A���x�̂���}�C�R������Ȃ��Ă͖����ł��B
�����āA__deley_us(1)�Ȃ�Ă��Ă�����A�S������o���܂���B
���N���b�N�x�ނ�(asm("nop"))�A�ł��B
(�ł��A���ۂɂ͕��߂����肱�݂܂�����A������������Ȃ̂ł�)
T0H 0 code ,high voltage time 0.4us �}150ns
T1H 1 code ,high voltage time 0.8us �}150ns
T0L 0 code , low voltage time 0.85us �}150ns
T1L 1 code ,low voltage time 0.45us �}150ns
(WS2812�̃f�[�^�V�[�g���)
���������A�Z���N�^SW���̂ɂ̓`���^�����O�ȊO�ɁA�V���[�e�B���O/�m�[�V���[�e�B���O�^�C�v�̖�������܂�����
����ł��B
�A���A�u�{�^���������Ă���Ԃ́`�v�Ƃ������������藧���܂��B
LED���x���̐�ւ��Ȃ�A�m�C�Y�ɂ��듮����C�Â��Ȃ������ɒʂ�߂��Č��ɖ߂�܂������͕s�v�ł��B
����ǂ��A���̃Z���N�^�X�C�b�`���傫�ȃV�X�e���̕ύX�Ȃ�A�����Ƒׂ��ł��B
> 88�̓��쑬�x���A�ŐV�^�ɂ���LAT���W�X�^��K�v�Ƃ���قǁA�����Ȃ����Ă������Ƃ��Ɛ������܂��B
�ǂ̈ʂ̑��x����듮�������̂��͔���܂��ǁA�ǂ̃f�o�C�X�ł��x���������Ζ��͔������܂���B
�܂��ALAT���W�X�^�����݂��Ȃ��f�o�C�X�ł����̖��͋N���蓾�܂��B
�ŋ߂̓d�q�H����A����Ȃ�̔\�͂������ƃf�o�C�X�𐧌�o���܂���B
�Ⴆ�A�ŋߐl�C�̃}�C�R������LED�i�l�I�s�N�Z���jWS2812B���̐����F88������ł͖����ł��B
F1827�ł����Ȃ肫���Ǝv���܂��i�ł��A�œK�Ȓl��������Α��������j�BUNO��PIC18(16MIPS)�łȂ�Ƃ��i���Ńv���O��������Γ����j�A�Ƃ������x�����Ǝv���܂��B
�ܘ_�AF88��F1827�ł��命���̂��̂͐���\�ł����ǁA���オ�i�ނɂ�A���Ӄf�o�C�X���ω����Ă����܂�����A
����ƈ����Ȃ����̂̊����������邱�ƂɂȂ�܂��B
> __delay_ms(1)�G
__delay_us(1)�ŏ[���ł��傤�ˁB
�O�q��LED�͉��̊����̐���ɂȂ�܂��B
���͈̔͂ɐ��䂷��̂͂�����x�A���x�̂���}�C�R������Ȃ��Ă͖����ł��B
�����āA__deley_us(1)�Ȃ�Ă��Ă�����A�S������o���܂���B
���N���b�N�x�ނ�(asm("nop"))�A�ł��B
(�ł��A���ۂɂ͕��߂����肱�݂܂�����A������������Ȃ̂ł�)
T0H 0 code ,high voltage time 0.4us �}150ns
T1H 1 code ,high voltage time 0.8us �}150ns
T0L 0 code , low voltage time 0.85us �}150ns
T1L 1 code ,low voltage time 0.45us �}150ns
(WS2812�̃f�[�^�V�[�g���)
�ҋ����b�N 2018/12/23(Sun) 02:29 No.1360 Re: ���䕪�ɂ���
�F���͂悤�������܂��B
��asm("nop");
���̈Ӗ��ׂĕ�����܂����B
�g�����́AIC�̉����҂��Ƃ����̂��_���Ȃ�ł��ˁB
�����N���b�N�҂��Ƃ����Ƃ����̂ŁA�O���܂ł��A���܂������Ԃ�҂̂��Ǝv���Ă��܂������A
IC�̓����҂Ƃ����Ӗ���������ł��ˁB
���A�u�m���V���[�e�B���O�^�C�v�v
��������ƖY��Ă������t�ł��B�i��
���ׂĎv���o���܂����B
mabo���ȑO�Ɍ����Ă����Ǝv���o���܂����B
�NjL
�����@OSCCON���W�X�^���M���ĂSMHZ�ɐݒ肵�܂����B
��asm("nop");
���̈Ӗ��ׂĕ�����܂����B
�g�����́AIC�̉����҂��Ƃ����̂��_���Ȃ�ł��ˁB
�����N���b�N�҂��Ƃ����Ƃ����̂ŁA�O���܂ł��A���܂������Ԃ�҂̂��Ǝv���Ă��܂������A
IC�̓����҂Ƃ����Ӗ���������ł��ˁB
���A�u�m���V���[�e�B���O�^�C�v�v
��������ƖY��Ă������t�ł��B�i��
���ׂĎv���o���܂����B
mabo���ȑO�Ɍ����Ă����Ǝv���o���܂����B
�NjL
�����@OSCCON���W�X�^���M���ĂSMHZ�ɐݒ肵�܂����B
TR 2018/12/23(Sun) 07:35 Re: ���䕪�ɂ���
>�@IC�̓����҂Ƃ����Ӗ���������ł��ˁB
�������A�Ⴂ�܂��B16F�Ȃ�1�T�C�N����4�N���b�N����܂��B
�P�ɉ�������ȁA�Ƃ������߂ł��B
�\�ɂ͏o�Ȃ��Ă��A�悭�g���閽�߂ł��B
__delay_ms()��__delay_us()�͂���nop���߂��w�莞�ԍs���܂��B
�ŁA����A���̎w�莞�Ԃ��̓R���p�C��������Ȃ��̂ŁAF_CPU��_XTAL_FREQ�ȂǁA
�ǂ̈ʂ̋쓮�N���b�N�����L�q���Ȃ���delay���߂��o���܂���B
IC�̓����҂A�Ƃ������Ƃł͂���܂���B
�������A�Ⴂ�܂��B16F�Ȃ�1�T�C�N����4�N���b�N����܂��B
�P�ɉ�������ȁA�Ƃ������߂ł��B
�\�ɂ͏o�Ȃ��Ă��A�悭�g���閽�߂ł��B
__delay_ms()��__delay_us()�͂���nop���߂��w�莞�ԍs���܂��B
�ŁA����A���̎w�莞�Ԃ��̓R���p�C��������Ȃ��̂ŁAF_CPU��_XTAL_FREQ�ȂǁA
�ǂ̈ʂ̋쓮�N���b�N�����L�q���Ȃ���delay���߂��o���܂���B
IC�̓����҂A�Ƃ������Ƃł͂���܂���B
�ҋ����b�N 2018/12/23(Sun) 10:20 No.1362 �t�@�C���̒lj����@
�F���͂悤�������܂��B
������F�l�ɂƂ��Ă͍��X�Ȃ̂����B
MPLAB IDE�̑�����@�ŁA
main�t�@�C�������A�lj��Ńt�@�C���𑝂₷���@���A
����ƕ�����܂����B�@���̃y�[�W�̒����ɂ���܂����B
���܂łǂ����Ă������Ƃ����ƁA
�e�L�X�g�t�@�C���ɕۑ������t�@�C�����A
MPLAB IDE�̃G�f�B�^�ɃR�s�y���Ă��܂����B
http://www.picfun.com/mplabx/mpxlab01.html
������F�l�ɂƂ��Ă͍��X�Ȃ̂����B
MPLAB IDE�̑�����@�ŁA
main�t�@�C�������A�lj��Ńt�@�C���𑝂₷���@���A
����ƕ�����܂����B�@���̃y�[�W�̒����ɂ���܂����B
���܂łǂ����Ă������Ƃ����ƁA
�e�L�X�g�t�@�C���ɕۑ������t�@�C�����A
MPLAB IDE�̃G�f�B�^�ɃR�s�y���Ă��܂����B
http://www.picfun.com/mplabx/mpxlab01.html
TR 2018/12/19(Wed) 10:27
- JoyfulNote v6.02 -
++ Edited by Hamel ++