�g�s�b�N�֘A�L��
48���Ԉȓ��̋L����  �ŕ\������܂�
�ŕ\������܂�
�ŕ\������܂�
�^���ϒ�R
 mabo���͂悤�������܂��B
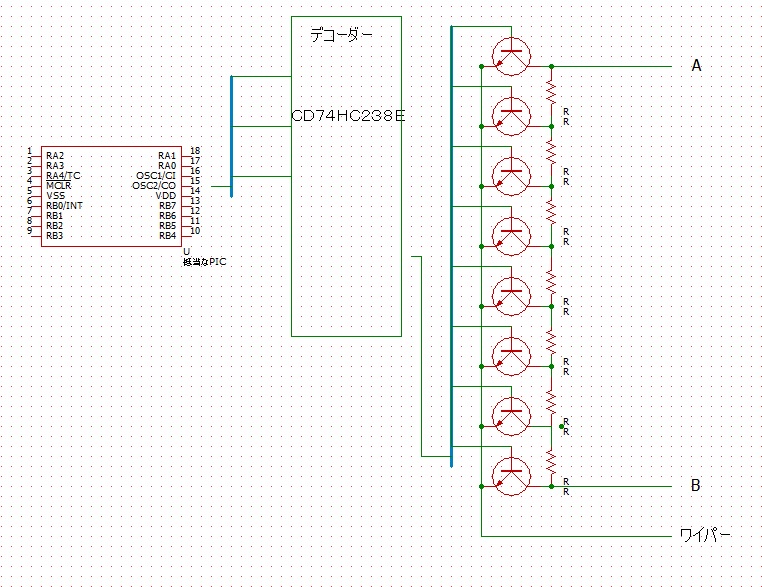
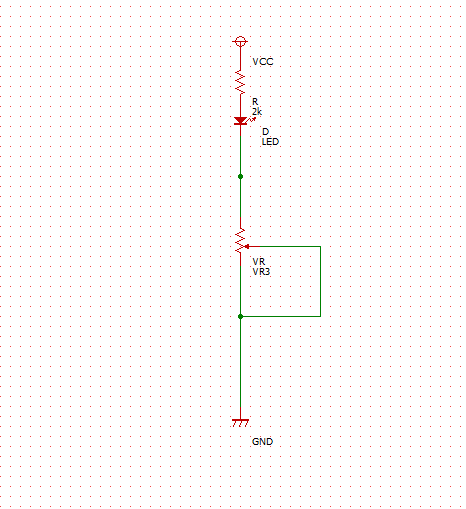
mabo���͂悤�������܂��B�f�W�^���|�e���V�����ɑウ�āAmabo����̋^���ϒ�R�𐧌䂷��v���O�������n�߂悤�Ǝv���܂��B
�X�������肢���܂��B
�Ǝv���܂������A
Tr�̓V���N�쓮�ł����
�쓮������̂̂��Ȃ�����d��������Ȃ�
�ŏ�i��Tr
�Ԏ��͋}���܂���B
�NjL
���C�p�Ɠd���[�q�Ԃ̒�R���v������ꍇ�ATR��ʂ���悤�ɂȂ�̂ł́B
 TR
TR  2019/06/20(Thu) 07:43 No.1700
2019/06/20(Thu) 07:43 No.1700
Re: �^���ϒ�R
 �s�q����C�ҋ����b�N����C�����́B
�s�q����C�ҋ����b�N����C�����́B�s�q����C���߂�Ȃ����C��H�̂��Ƃ悭�킩��Ȃ��̂ŁC
���m�ȓ����́C�H�ł��B
�����C�[�����܂������Ȃ��ꍇ�́C�Y�t�̂悤�ɂ��Ă��������ȁC
�ƍl���Ă��܂����B��������ƁC���C�p�[�Œ[�Ɉړ����Ă��C��R�c��܂����B
���̕����ň��̂��ƍl���Ă������悤�ȋC�����܂��B
�S���̒�R���C�d���́C�g�����W�X�^��ʂ������̂ɂȂ�Ǝv���܂��̂ŁC
�����͂���Ǝv���܂��B
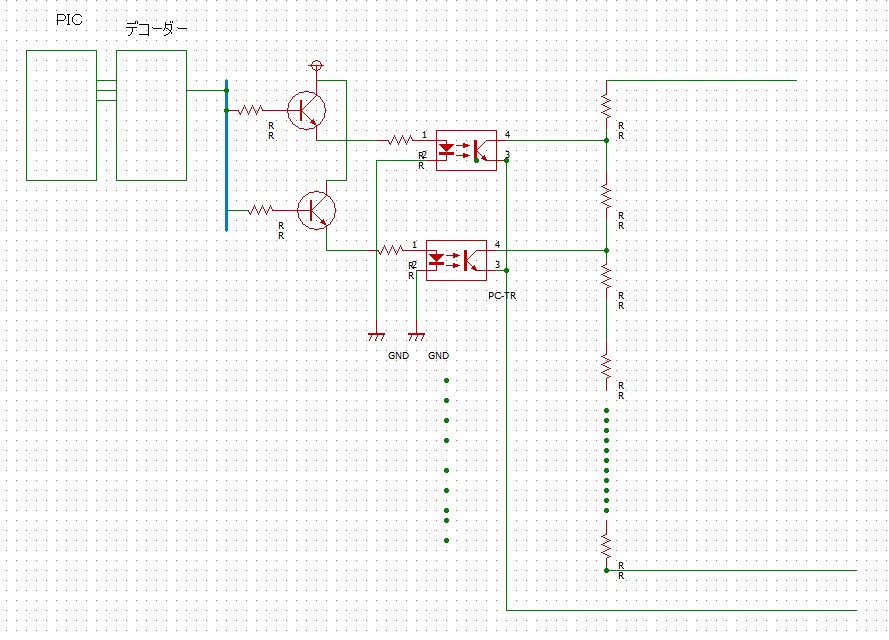
���ꂩ��C�g�����W�X�^�̔j�����l����ƁC�t�H�g�J�v���[���͂���ŁC�≏���������������ȂƎv���܂����B
���ꂩ��C�v���O�����ł����C
���܂ł̂��̉��ς���Ύg����Ǝv���܂��B
�P�O�Q�R�ŕ��ώ�������̂��C8�i�K�ɂ���B
up�Edown�̃T�u����ύX����C���ʼn\���Ǝv���܂��B
�����Cup�Edown�@�̊��ŁC�f�R�[�_�[�ɐM���𑗂�悤��
�Ȃ�Ǝv���܂����C���W�X�^�R�ɑ���̂ő�����Ԃ�����Ǝv���܂��B
�f�[�^�[�V�[�g�ł́C
�@�@�@�@�P�O�i��
�@LLL�@���@�O
�@LLH�@���@�P
�@LHL�@���@�Q
�@LHH�@���@�R
�@HLL ���@�S
�@HLH�@���@�T
�@HHL�@���@�U
�@HHH�@���@�V
�ł��̂ŁC
�@�@PORTA���T
�̂悤�ɂ��Ă��܂��C��x�ɑ���܂����C
�@�@�iHLH���T�@�𑗂�ꍇ�j
�@�@RA0=�T
�@�@RA1=�T>>�P
�@�@RA2=�T>>�Q
�݂����ɁC�V�t�g���邩�C�}�X�N�����Ă��ꂼ�ꑗ��
�悤�ł��傤���ˁB
�܂��C�W�ʂ�ł��̂ŁC�S���L�q���Ă����Ă������̂ł��傤���ǁC
�@�@case 0:�@RA0=0;//�P�O�i���O�𑗂�
�@�@�@�@�@�@RA1=0;
�@�@�@�@�@�@RA2=0;
�@�@case 1:�@RA0=1;//�P�O�i���P�𑗂�
�@�@�@�@�@�@RA1=0
RA2=0;
�@�@case 2:RA0=0;//�P�O�i���Q���𑗂�
�@�@�@�@�@�@RA1=1;
�@�@�@�@�@�@RA2=0;
�@�E�E�E�E�E�E
�@�E�E�E�E�E�E
�@�@case 7;RA0=1;//�P�O�i���V�𑗂�
�@�@�@�@�@�@RA1=1;
�@�@�@�@�@�@RA2=1;
�@����ƁC�g�������Ȓ�R�A���C���Ă݂܂������ǁC
�@�}���c�łP�O�Q�ƕ\�L�̂�����̂ł��傤���ˁB
�@�c�O�Ȃ���C�H���ɂ́C�g�������ȃ^�C�v�́C�Ȃ��悤�ł����B
 mabo 2019/06/20(Thu) 22:49 No.1701
mabo 2019/06/20(Thu) 22:49 No.1701
Re: �^���ϒ�R
 mabo����A���͂悤�������܂��B
mabo����A���͂悤�������܂��B�������A���~������ɁA�t�H�g�J�v�����g�������@���v�����܂����B
�ł��A���C�p�[�Ɠd�����Ԃ̒�R�l�̃��C����d���������`�ł���ˁB
�����������A�g�����͓K���Ȃ낤���Ƃ����^�₪�c��܂��B
Tr���𗘗p���Ă̒�R���g���ĕ�������Ƃ��������Ƃ����߂čl���Ă݂��̂ŁA
�^��Ɋ����܂����B
��B�҂̎��Ⴊ��������̂ł����B
��A����̌`�̏ꍇ�A�������炠����Tr�́A�lj��̃t�H�g�J�v��������̂�
Tr��2�ɂȂ����`�ƂȂ�̂ŁA
������Tr�͂���Ȃ��Ǝv���܂��B
���̂܂܂��ƁA�_�[�����g���ڑ��̌`�ł��B
����ɁA
�t�H�g�J�v���̎g�����̏ꍇ�A�V���N�ł��\�[�X�ł�OK�Ȃ̂ŁA
�E��ɐ݂�����R�͕s�v�ł���B
�F�X�Ƃ��݂܂���B
TR 2019/06/21(Fri) 06:20 No.1702
Re: �^���ϒ�R
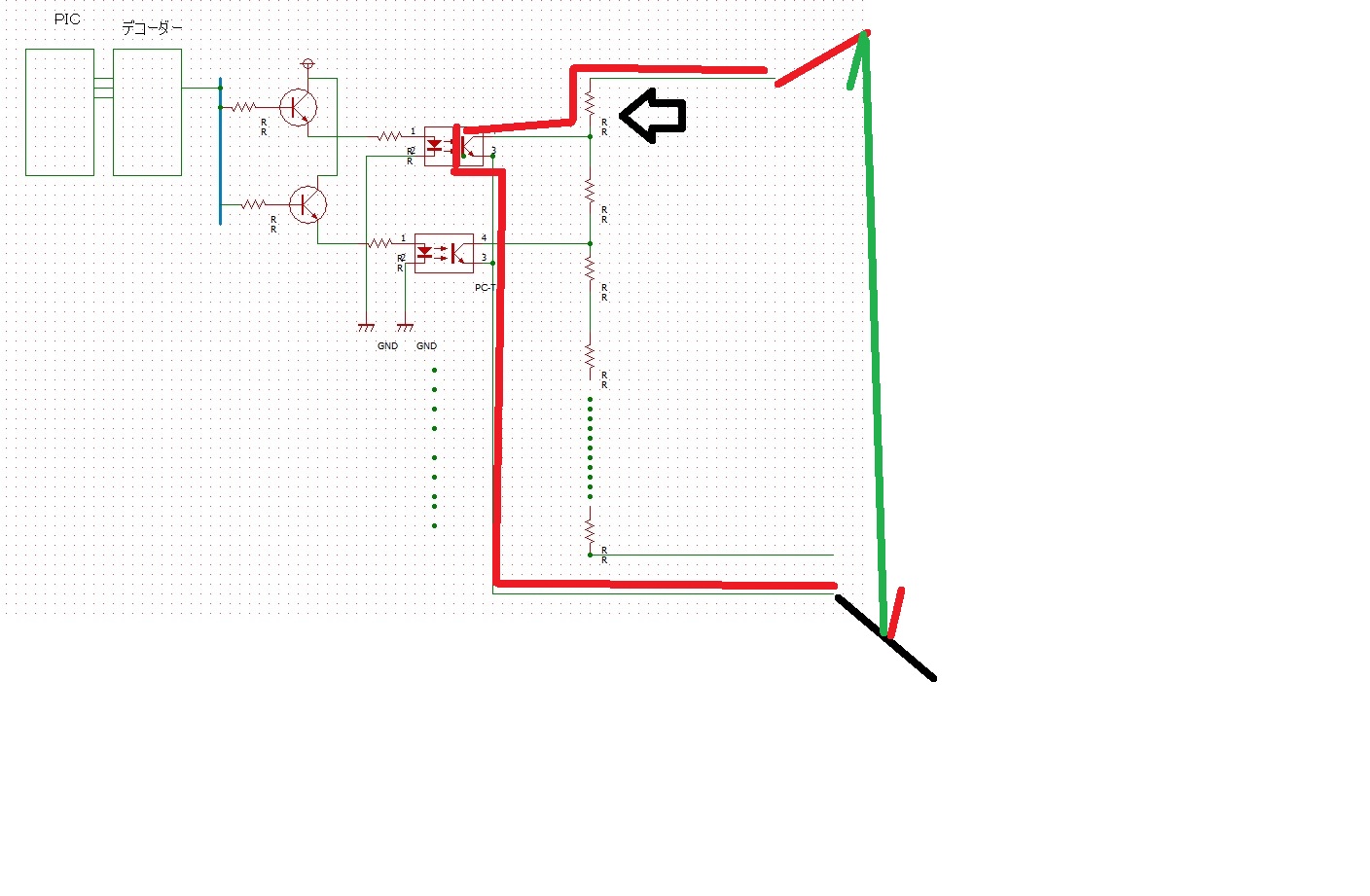
 �ȒP�������̂ŁA�������܂����B
�ȒP�������̂ŁA�������܂����B��͂�z�����Ă����Ƃ���ŁA
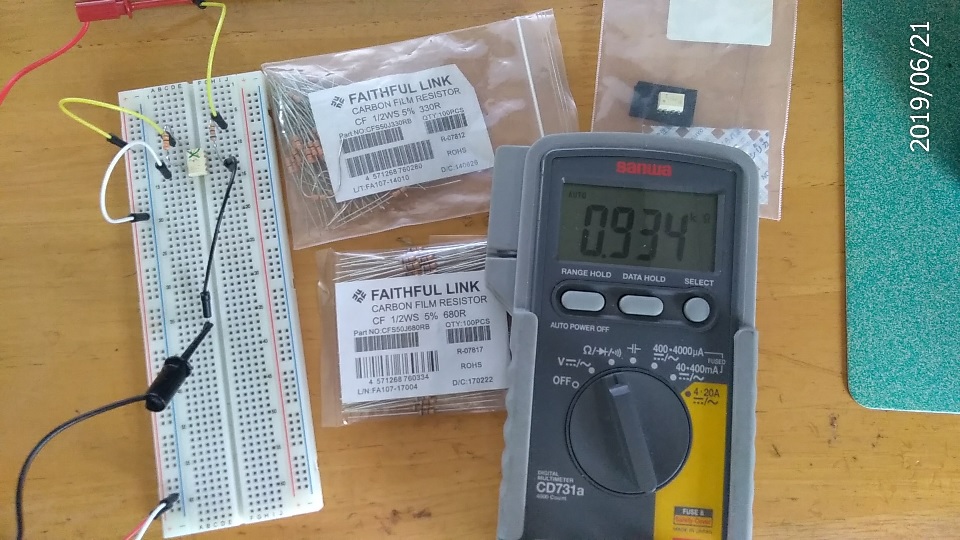
Tr����ʂ����ꍇ�A��R�l���傫���ς��܂��B
��v����R�l680�����ʐ^�̗l�ɖ�0.9���ɂȂ�܂����B
�NjL
mabo����́ANo1681�ŁA5220�̃e�X�g���ʂƂ���
��
��������������������
���C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
�@���ꂩ��C�o�h�b�@�`�c�T�Q�Q�O�̓d���̓�����ŁC
�@�R���g���[���ł��Ȃ��Ȃ�ꍇ������悤�ł��B
��������������������������������������������������������������
���̎��̎����̍ہAPIC�̃v���O�����́A�ҋ����b�N����̂ł����H
����Ƃ��Amabo�����No1693�ł����H�H
mabo����̂Ɣ�ׂāA�����������̂ł��傤���H�H
����ƁA
�d���̓�����ŁA��肪�������悤�ł����A�������̂��߂�
No1693�̃v���O�����ł́A�ǂ̂悤�ɂ����̂ł��傤���H
x9c���܂������A������5220�́A������ɂ͗���Ǝv���܂�
TR 2019/06/21(Fri) 07:00 No.1703
Re: �^���ϒ�R
�s�q����C�ҋ����b�N����C�����́B
�s�q����C���낢�날�肪�Ƃ��������܂��B
������������
�������������A�g�����͓K���Ȃ낤���Ƃ����^�₪�c��܂��B
�����C�����ōl���Ă����Ȃ���C�����C�s�q�������������������悤�Ȃ��ƍl���Ă��܂��܂��B
���̓_�C�����ȈӖ��ŁC���_�I�Ȕw�i�̂��鏔�Z�������܂����ł��B
������������
��������Tr�͂���Ȃ��Ǝv���܂��B
�f�R�[�_�h�b�̃h���C�u�\�͂̃f�[�^�V�[�g�݂ĂȂ��̂ŁC
�܂��C����Ƃ��C���Ȃ����ȁC�ʂ̋C�����ł���܂����B
�����C����Ȃ��Ă��C�h���C�u�\�͂͂������傤�ł��傤�ˁB
�ړI���Ⴄ�̂ł����C�V�Z�O�̃_�C�i�~�b�N�\���ł́C
�g�����W�X�^����Ă��H���݂����܂��̂ŁC
������C���ɂ������̂����ł��ˁB
����������
���E��ɐ݂�����R�͕s�v�ł���B
������[���Ӗ��͂���܂���B�����C�w�X�b���̎�������Ƃ��C
�Œ[�ł��S�O�����x�̒�R������C�̕\�L�ŁC�P�V�O�P�̂悤�ȍ\�����ȁC�ƁC���Ƃ��肵�܂����B
������C�g����J�v���[��g�����W�X�^�[���C�V���[�g����
�����ŁC�p���N�����Ƃ��C�����̈��S�قɂȂ邩�ȁC
�ʂ̈ӎ��ŁC����܂����̂ŁC�傫�ȈӖ��Ȃ��ł��B
�V���N�@���@�\�[�X���C�Ȃ�Ă��Ƃ��C�l���Ă��܂���ł����B
��������������
�����C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
����m���߂��́C�^�N�g�X�C�b�`���g�������荞�݂��g���������̃v���O�����ł��B
������������
���d���̓�����ŁA��肪�������悤�ł����A�������̂��߂�
��No1693�̃v���O�����ł́A�ǂ̂悤�ɂ����̂ł��傤���H
��ʓI�ȁC�o�b���̓d���̓�����ł��Ă��܂����B
��Ԃ̃m�C�Y���傫���Ƒz�肳��郂�[�^�[�́C��ԍŏ��ɂ���āC���̂悤�ɂ��Ă܂����B
�@���[�^�[�@���@�`�c�T�Q�Q�O�@���@�o�h�b
��͂肱�ꂾ�Ƃ��߂ł����B
�o�b�̓d���̓�����́C���Ӌ@��̔F���̖�������̂ŁC
���Ӌ@�킩��n�m����̂���ʓI���Ǝv���܂����C���ꂪ���߂ł����B
�o�h�b�̓d������ɂ���ƁC�o�h�b�N�����̉e�����C�`�c�T�Q�Q�O���R���g���[���ł��Ȃ��Ȃ�C�ƑO��ɋL�q�����Ƃ���ł��B
����ŁC�t�ɂ��C�o�h�b���ɂn�m�ɂ��Ă݂��̂ł����C�c�T�Q�Q�O�̓d�������鎞�ɂ́C�o�h�b���ł́C���������I����Ă��܂��̂ŁC
�ŏ����܂������܂���ł����B
����ŁC�o�h�b�̃v���O�����ŁC�������̑O�ɂ��낢��E�G�C�g�����Ă��߂��܂����B
�����C�����Ƃ��āC�������̊J�n�́C�E�G�C�g����Ă��C�ω��Ȃ��悤�Ȋ����ł����ł����B
����Ȃ���ȂŁC���낢�����Ă݂āC�o�h�b�̃|�[�g�̏������̑O�ɂP��C
�`�c�T�Q�Q�O�̑O��1��C���ꂼ��C�E�G�C�g����āC
�o�h�b�̋N����C���b�ȓ��ɂ`�c�T�Q�Q�O���n�m�ɂ�����
���قڂP�O�O���R���g���[���ł����C�Ƃ�����Ԃł��B
�����̎��̎����̍ہAPIC�̃v���O�����́A�ҋ����b�N����̂ł����H
������Ƃ��Amabo�����No1693�ł����H�H
��mabo����̂Ɣ�ׂāA�����������̂ł��傤���H�H
�ҋ����b�N����̃v���O�����́C�`�c�ϊ��ŁC���C�p�[�Łw�������Ă��܂��̂ŁC
�����̂Ŋm�F���������ł��̂ŁC�Ⴂ�́C������܂���B
��������
���ۂɂ`�c�T�Q�Q�O�����g���ɂ́C�o�h�b���̑���ŁC
�`�c�T�Q�Q�O�̓d���n�m�̎��Ԃ�x�点�铙�́[�h�I�ȏ��u���K�v�Ȃ̂��ȂƎv���܂����B
�����C�c�O�Ȃ���C���܂܂ŁC�����Ȃg�o�����Ă��܂������C
���Ӌ@��̋N�����n�[�h�Œx�点�Ă�C���̂́C�Ȃ������悤�Ɏv���܂��B
��@�I�ɂ́C����قǎ�Ԃ�����Ȃ��悤�Ȃ������܂��B
�s�q����C���낢�날�肪�Ƃ��������܂��B
������������
�������������A�g�����͓K���Ȃ낤���Ƃ����^�₪�c��܂��B
�����C�����ōl���Ă����Ȃ���C�����C�s�q�������������������悤�Ȃ��ƍl���Ă��܂��܂��B
���̓_�C�����ȈӖ��ŁC���_�I�Ȕw�i�̂��鏔�Z�������܂����ł��B
������������
��������Tr�͂���Ȃ��Ǝv���܂��B
�f�R�[�_�h�b�̃h���C�u�\�͂̃f�[�^�V�[�g�݂ĂȂ��̂ŁC
�܂��C����Ƃ��C���Ȃ����ȁC�ʂ̋C�����ł���܂����B
�����C����Ȃ��Ă��C�h���C�u�\�͂͂������傤�ł��傤�ˁB
�ړI���Ⴄ�̂ł����C�V�Z�O�̃_�C�i�~�b�N�\���ł́C
�g�����W�X�^����Ă��H���݂����܂��̂ŁC
������C���ɂ������̂����ł��ˁB
����������
���E��ɐ݂�����R�͕s�v�ł���B
������[���Ӗ��͂���܂���B�����C�w�X�b���̎�������Ƃ��C
�Œ[�ł��S�O�����x�̒�R������C�̕\�L�ŁC�P�V�O�P�̂悤�ȍ\�����ȁC�ƁC���Ƃ��肵�܂����B
������C�g����J�v���[��g�����W�X�^�[���C�V���[�g����
�����ŁC�p���N�����Ƃ��C�����̈��S�قɂȂ邩�ȁC
�ʂ̈ӎ��ŁC����܂����̂ŁC�傫�ȈӖ��Ȃ��ł��B
�V���N�@���@�\�[�X���C�Ȃ�Ă��Ƃ��C�l���Ă��܂���ł����B
��������������
�����C�p�[���[�܂ŁC�������ƁC�Б��O�V�����@�Б��O�D�Q�������x�c��܂��B
����m���߂��́C�^�N�g�X�C�b�`���g�������荞�݂��g���������̃v���O�����ł��B
������������
���d���̓�����ŁA��肪�������悤�ł����A�������̂��߂�
��No1693�̃v���O�����ł́A�ǂ̂悤�ɂ����̂ł��傤���H
��ʓI�ȁC�o�b���̓d���̓�����ł��Ă��܂����B
��Ԃ̃m�C�Y���傫���Ƒz�肳��郂�[�^�[�́C��ԍŏ��ɂ���āC���̂悤�ɂ��Ă܂����B
�@���[�^�[�@���@�`�c�T�Q�Q�O�@���@�o�h�b
��͂肱�ꂾ�Ƃ��߂ł����B
�o�b�̓d���̓�����́C���Ӌ@��̔F���̖�������̂ŁC
���Ӌ@�킩��n�m����̂���ʓI���Ǝv���܂����C���ꂪ���߂ł����B
�o�h�b�̓d������ɂ���ƁC�o�h�b�N�����̉e�����C�`�c�T�Q�Q�O���R���g���[���ł��Ȃ��Ȃ�C�ƑO��ɋL�q�����Ƃ���ł��B
����ŁC�t�ɂ��C�o�h�b���ɂn�m�ɂ��Ă݂��̂ł����C�c�T�Q�Q�O�̓d�������鎞�ɂ́C�o�h�b���ł́C���������I����Ă��܂��̂ŁC
�ŏ����܂������܂���ł����B
����ŁC�o�h�b�̃v���O�����ŁC�������̑O�ɂ��낢��E�G�C�g�����Ă��߂��܂����B
�����C�����Ƃ��āC�������̊J�n�́C�E�G�C�g����Ă��C�ω��Ȃ��悤�Ȋ����ł����ł����B
����Ȃ���ȂŁC���낢�����Ă݂āC�o�h�b�̃|�[�g�̏������̑O�ɂP��C
�`�c�T�Q�Q�O�̑O��1��C���ꂼ��C�E�G�C�g����āC
�o�h�b�̋N����C���b�ȓ��ɂ`�c�T�Q�Q�O���n�m�ɂ�����
���قڂP�O�O���R���g���[���ł����C�Ƃ�����Ԃł��B
�����̎��̎����̍ہAPIC�̃v���O�����́A�ҋ����b�N����̂ł����H
������Ƃ��Amabo�����No1693�ł����H�H
��mabo����̂Ɣ�ׂāA�����������̂ł��傤���H�H
�ҋ����b�N����̃v���O�����́C�`�c�ϊ��ŁC���C�p�[�Łw�������Ă��܂��̂ŁC
�����̂Ŋm�F���������ł��̂ŁC�Ⴂ�́C������܂���B
��������
���ۂɂ`�c�T�Q�Q�O�����g���ɂ́C�o�h�b���̑���ŁC
�`�c�T�Q�Q�O�̓d���n�m�̎��Ԃ�x�点�铙�́[�h�I�ȏ��u���K�v�Ȃ̂��ȂƎv���܂����B
�����C�c�O�Ȃ���C���܂܂ŁC�����Ȃg�o�����Ă��܂������C
���Ӌ@��̋N�����n�[�h�Œx�点�Ă�C���̂́C�Ȃ������悤�Ɏv���܂��B
��@�I�ɂ́C����قǎ�Ԃ�����Ȃ��悤�Ȃ������܂��B
mabo 2019/06/22(Sat) 00:16 No.1704
Re: �^���ϒ�R
 mabo����A���͂悤�������܂��B
mabo����A���͂悤�������܂��B�����낢�����Ă݂āC�o�h�b�̃|�[�g�̏������̑O�ɂP��C
�`�c�T�Q�Q�O�̑O��1��C���ꂼ��C�E�G�C�g����āC
�o�h�b�̋N����C���b�ȓ��ɂ`�c�T�Q�Q�O���n�m�ɂ�����
���قڂP�O�O���R���g���[���ł����C�Ƃ�����Ԃł��B
�Emabo����̃v���O����No1693�Ə�L����������ׂĕ�����܂����B
�������A�Q�l�ɂ��܂��B�L��������܂��B
�^���ϒ�R�Ɏg�����t�H�g�J�v���[�ł����A�������ʂɂ��Œ��R�̑���ɂȂ�̂͊ԈႢ�Ȃ��Ǝv���܂��B
T���̓�����R�Ə��d���̊W���ǂ����ȂƂ������Ƃ��낪�����āA����Ɏg���̂̓R�c�����邩������܂���ˁB
���������������������������{�{�{�{�{�{�{�{�{�{�{�{�{�{�{�{
�@�@5220�����ɔ���
�E�{���̐M���̗���ł���SEC�����̐M���́AMACH�̊�{���g���i200Hz�z��j���邱�ƂɂȂ�܂����A
���܂ŁA
DC�TV�`VR�`PIC�iAD�ϊ�����X9c�쓮�v���O�����j�`x9c�`LED�i��R�t���j�ł����B
����́A
DC5V�`VR�`PIC(PWM240Hz����)�`
���[�p�X�i���[�J�b�g200Hz�j�`
PIC�iAD�ϊ�������X9c�쓮�v���O�����j�`
5220�i�P�ɁA���C�p�Ɖ�����Rl�[�q�Ԃ̏�����j
�̕��@���v���X���āA�Ƃ��܂����B
��AD�ϊ�������5220�쓮�v���O�����́A�ҋ����b�N�����mabo����̂��v���X���܂��B
PIC(PWM240Hz����)�̕�����lj������̂ŁAMACH�iPWM��{���g��240Hz)�Ɏ������ɂ��܂����B
�܂��A�K�����ǂ����s���ł����B
���ہA
PIC(PWM240Hz����)��LED��t����ƁA�����ɔ����o��̂�������܂����B
�ڎ��Ŋm�F�ł���̂��Ƃ������܂����I
����́AOSCCON�̐ݒ�Ƃ��܂��߂ɍl���܂����B
�ʐ^���ڂ��܂����B�Z�o���@���悹���ʐ^�ł����A�����Ă��܂����H
��������������B
�X�������肢���܂��B
PIC16F1827
TR 2019/06/22(Sat) 09:40 No.1705
Re: �^���ϒ�R
 mabo����ցA5220���{���������܂����B
mabo����ցA5220���{���������܂����B�ߌォ��A�S���Ă��܂������A�܂��������삵�܂���B
�v���O�����́ANo1671�ł��B
�e�X�g�p�v���O�������Ȃ��̂ŁA�g���܂����B
�e�X�g���@�͎ʐ^�̂Ȃ����ł��B
����́A���Ȃ��悤��2���I�[���̒�R�ł��B
TR 2019/06/22(Sat) 15:47 No.1708
Re: �^���ϒ�R
�s�q����C�ҋ����b�N����C�����́B
�s�q����C���낢�����Ă��܂��ˁB
������ƁC�s���ȓ_�Ȃ̂ł����C
�s�q�������C���ꂽ�̂́C�r�d�b����̊�ՂƐ藣���āC
�l�`�b�g����̂o�v�l�̐M���̑���ɁC�{�����[���ŁC
�d���������āC�o�h�b�ɓ���Ă̎����ł������B
����ƁC�d���v��ꂽ�̂́C���͂Ɏg�����{�����[���ł��傤���B
����Ƃ��C�w�X�b�Ōv��ꂽ�̂ł����B
������ƕs���ł��B
�����́C����̑�����̉e���������Ă��܂��̂ŁC
�{�P�|�b�@�ƁC���܂����B
���낢�날�����Ă��̂ł����C�����悤�Ȃ��Ƃ���Ă���
���Z�������܂����B
�����C�b�m�b���̃R���g���[���ł͂Ȃ��C�I�[�f�B�I�̃{�����[���̒����̂悤�ł��B
http://mikenekosou.blog76.fc2.com/blog-entry-140.html
���̎g�����́C�d������@�Ȃ�ł��傤�ˁB
���߂Ēm��܂������C���I�X�^�b�h�E���[�h�Ƃ������݂����ł��B
�v���O�������̂��ĂȂ��̂ŁC�悭������܂��C
���̏��Z�́C�o�h�b�Ł@�����ɕ����̃J�v���[���n�m�ɂ��āC
�R���g���[�����Ă�悤�Ȋ����ł����ˁB
����ƁC�@�B�I�ȃ����[�Ɠ����ȏ�̃t�H�b�g�J�v���[�̏Љ������܂����B
�����ł��B�T�O�O�~�O�シ��݂����ł��ˁB
�s�q����C���낢�����Ă��܂��ˁB
������ƁC�s���ȓ_�Ȃ̂ł����C
�s�q�������C���ꂽ�̂́C�r�d�b����̊�ՂƐ藣���āC
�l�`�b�g����̂o�v�l�̐M���̑���ɁC�{�����[���ŁC
�d���������āC�o�h�b�ɓ���Ă̎����ł������B
����ƁC�d���v��ꂽ�̂́C���͂Ɏg�����{�����[���ł��傤���B
����Ƃ��C�w�X�b�Ōv��ꂽ�̂ł����B
������ƕs���ł��B
�����́C����̑�����̉e���������Ă��܂��̂ŁC
�{�P�|�b�@�ƁC���܂����B
���낢�날�����Ă��̂ł����C�����悤�Ȃ��Ƃ���Ă���
���Z�������܂����B
�����C�b�m�b���̃R���g���[���ł͂Ȃ��C�I�[�f�B�I�̃{�����[���̒����̂悤�ł��B
http://mikenekosou.blog76.fc2.com/blog-entry-140.html
���̎g�����́C�d������@�Ȃ�ł��傤�ˁB
���߂Ēm��܂������C���I�X�^�b�h�E���[�h�Ƃ������݂����ł��B
�v���O�������̂��ĂȂ��̂ŁC�悭������܂��C
���̏��Z�́C�o�h�b�Ł@�����ɕ����̃J�v���[���n�m�ɂ��āC
�R���g���[�����Ă�悤�Ȋ����ł����ˁB
����ƁC�@�B�I�ȃ����[�Ɠ����ȏ�̃t�H�b�g�J�v���[�̏Љ������܂����B
�����ł��B�T�O�O�~�O�シ��݂����ł��ˁB
mabo 2019/06/22(Sat) 22:14 No.1711
Re: �^���ϒ�R
�����̎���
�����̌q�����ł��ˁB
DC5.1V�d���`VR�`PIC�iPWAM�����j�`���[�p�X�`PIC�i0622/5220�쓮�v���O�����j�`AD5220�`�e�X�^�[
�܂��ASEC���ML4�ɂ͐G��Ă��܂���B
�|�e���V�������[�^�[�́AAD5220�����������̂ŁA���߂Ďg���܂����B
�d������ӏ��́AAD5220�̃��C�p�[�`Rl�Ԃł��B
�����̌q�����ł��ˁB
DC5.1V�d���`VR�`PIC�iPWAM�����j�`���[�p�X�`PIC�i0622/5220�쓮�v���O�����j�`AD5220�`�e�X�^�[
�܂��ASEC���ML4�ɂ͐G��Ă��܂���B
�|�e���V�������[�^�[�́AAD5220�����������̂ŁA���߂Ďg���܂����B
�d������ӏ��́AAD5220�̃��C�p�[�`Rl�Ԃł��B
TR 2019/06/22(Sat) 22:32 No.1712
Re: �^���ϒ�R
�s�q����C�ҋ����b�N����C�����́B
�s�q����̎������킩��܂����B
���肪�Ƃ��������܂��B
�o�v�l�̔����Ɋւ���L�ڂ��������̂ŁC������Ƃ���C�Ǝv��������ł��B
�������Ńv���O�������ꂽ�C�o�v�l�M������͂ɂ��g���Ȃ�ł��ˁB
�����������܂����B
�`�c�T�Q�Q�O�S���肵�܂��B
������ƁC�����͕�����܂���B
�b�k�j�Ƃt�^�c�P�g���v���A�b�v���邩���Ȃ����ł��C
���̏ꍇ�������ω����܂����B
�悭�킩��ɂ̂ł����C�b�r�[�q�͌Œ肵�Ă���܂����C
���̕ς����������ĊW����̂�������܂���B
�O������̃m�C�Y�₷���̂ł��傤���ˁB
���̕ӂ́C���삵�������C�m�C�Y���ɂ͋��������ł��ˁB
�s�q���ꂩ��C�v���O�����ł����C
while (AD5220_val>0)AD5220_down;
AD5220_down�@�����@AD5220_down(�@);
�ł��傤���ˁB
����ƁC
while (AD5220_val>0)
while (AD5220_val)
�́C���Ǔ����Ӗ����Ǝv���܂��BAD5220_val�@�̕ϐ��́C
AD5220_down(�@)�̃T�u�����ŁC�O�@�ɂȂ�܂ŁC�}�C�i�X����܂��B
while�iK)�@�́CK�̕������O�ȊO���ƃ��[�v����āC
�O�ɂȂ�ƁC���[�v����̂œ����Ӗ����Ǝv���܂��B
�O��̓^�N�g�X�C�b�`�g���āCAD5220�̃R���g���[�����܂������C
�H���̈����G���R�[�_�[�ŁC����Ă݂悤���ȂȂ�āC
���낢���Ă܂��B
����ƁC����̃f�W�^���|�e���V�����[�^�[�i�f�W�|�b�g�j�ɕK�v�ȕ��ށC
�܂Ƃ߂Ă��܂��B
�s�q����̎������킩��܂����B
���肪�Ƃ��������܂��B
�o�v�l�̔����Ɋւ���L�ڂ��������̂ŁC������Ƃ���C�Ǝv��������ł��B
�������Ńv���O�������ꂽ�C�o�v�l�M������͂ɂ��g���Ȃ�ł��ˁB
�����������܂����B
�`�c�T�Q�Q�O�S���肵�܂��B
������ƁC�����͕�����܂���B
�b�k�j�Ƃt�^�c�P�g���v���A�b�v���邩���Ȃ����ł��C
���̏ꍇ�������ω����܂����B
�悭�킩��ɂ̂ł����C�b�r�[�q�͌Œ肵�Ă���܂����C
���̕ς����������ĊW����̂�������܂���B
�O������̃m�C�Y�₷���̂ł��傤���ˁB
���̕ӂ́C���삵�������C�m�C�Y���ɂ͋��������ł��ˁB
�s�q���ꂩ��C�v���O�����ł����C
while (AD5220_val>0)AD5220_down;
AD5220_down�@�����@AD5220_down(�@);
�ł��傤���ˁB
����ƁC
while (AD5220_val>0)
while (AD5220_val)
�́C���Ǔ����Ӗ����Ǝv���܂��BAD5220_val�@�̕ϐ��́C
AD5220_down(�@)�̃T�u�����ŁC�O�@�ɂȂ�܂ŁC�}�C�i�X����܂��B
while�iK)�@�́CK�̕������O�ȊO���ƃ��[�v����āC
�O�ɂȂ�ƁC���[�v����̂œ����Ӗ����Ǝv���܂��B
�O��̓^�N�g�X�C�b�`�g���āCAD5220�̃R���g���[�����܂������C
�H���̈����G���R�[�_�[�ŁC����Ă݂悤���ȂȂ�āC
���낢���Ă܂��B
����ƁC����̃f�W�^���|�e���V�����[�^�[�i�f�W�|�b�g�j�ɕK�v�ȕ��ށC
�܂Ƃ߂Ă��܂��B
mabo 2019/06/23(Sun) 22:01 No.1714
Re: �^���ϒ�R
mabo����A�����́B
mabo�����5220�v���O�����ł����A
PIC�̏����ݒ�����݂�ƁA�������̑O��500�����̃E�G�C�g��2��t���Ă��܂����A
5220�́A�d��������ƒ�R�l�������ɂȂ�̂ŁA
�ŏ��ɁA���C�p����A�d���d���̔������o�͂���܂��H
�@�@�@�L
* ���C���̏��� *
*******************************************************************************/
void main(void)
{
int i ;
char s[17] ;
char mes[6]= {0xbd,0xc0,0xb0,0xc4,0x00} ; // "�X�^�[�g"�����̃J�^�J�i�f�[�^
//static unsigned char buff[12];
OSCCON = 0b01110010 ; // �����N���b�N�͂W�l�g���Ƃ���
__delay_ms(500);
__delay_ms(500);
����Ǝ�����5220�ł����A�d�����グ�Ă����r���A
�e�X�^�[�����Ă���ƁA��u�����ƎR���o�܂��B
��A�c���d���ł����A�u�����ɔ������Ă��܂��B
����ς�A���肵�܂���ˁB
mabo�����5220�v���O�����ł����A
PIC�̏����ݒ�����݂�ƁA�������̑O��500�����̃E�G�C�g��2��t���Ă��܂����A
5220�́A�d��������ƒ�R�l�������ɂȂ�̂ŁA
�ŏ��ɁA���C�p����A�d���d���̔������o�͂���܂��H
�@�@�@�L
* ���C���̏��� *
*******************************************************************************/
void main(void)
{
int i ;
char s[17] ;
char mes[6]= {0xbd,0xc0,0xb0,0xc4,0x00} ; // "�X�^�[�g"�����̃J�^�J�i�f�[�^
//static unsigned char buff[12];
OSCCON = 0b01110010 ; // �����N���b�N�͂W�l�g���Ƃ���
__delay_ms(500);
__delay_ms(500);
����Ǝ�����5220�ł����A�d�����グ�Ă����r���A
�e�X�^�[�����Ă���ƁA��u�����ƎR���o�܂��B
��A�c���d���ł����A�u�����ɔ������Ă��܂��B
����ς�A���肵�܂���ˁB
TR 2019/06/24(Mon) 19:06 No.1717
Re: �^���ϒ�R
�s�q����C�ҋ����b�N����C�����́B
�`�c�T�Q�Q�O�ɂ��ẮC�d���͑����ē��̂ŕs���ł����C
�o�v�l�R���g���[���̃{�����[���ƒu�������āC
���[�^�[�̃R���g���[���ŁC���f���Ă܂����C
���肵�Ȃ��Ƃ��́C���[�^�[�����Ȃ�������C
�������ŁC������ƃR���g���[�����ł���Ƃ��́C
�u�������O�̃{�����[���ł̃R���g���[���Ɠ������x�ɃR���g���[���ł��܂����B
���ŏ��ɁA���C�p����A�d���d���̔������o�͂���܂��H
�����C����C���킩������܂���B
�}�j���A���ɁC�ŏ��̓��C�p�[���C�U�S�̂Ƃ���ɂ���C�Ƃ̋L�q���������悤�Ɏv���܂��B
�����������܂������Ȃ��Ƃ̂��Ƃł����C
�o�v�l���������@���[�p�X�@�����@�o�h�b�i�`�c�ϊ��j�@�����@�`�c�T�Q�Q�O
�ł����ł��傤���B
�o�v�l�����ƃ��[�p�X���O���āC
�{�����[���i�Б��T�u�j���o�h�b�ڑ����Ă`�c�ϊ����Ă݂āC
���ʂ����Ă͂ǂ��ł��傤���B
����ƁC���g���̕��v���O�����́C�m���P�U�V�P�̂ł����B
�ύX���ĂȂ���C�������L�q���Cmain�@�̂Ȃ��ɂȂ��悤�ł����E�E�E�E�E�B
���������NjL�ł���������
��GND�ɂ��Ă���܂��B�@����ȏ�̕��@�͂ǂ����������@�Ȃ̂ł��傤���H
�Ӗ�����̂��͕�����܂��CCS�[�q���v���A�b�v��PIC�ɂȂ��ŁC
AD�T�Q�Q�O�̏������̑O�ɁC
�@RB�Q=�O;�iCS���Ȃ��ł���PIC�[�q�j
�@__delay_ms�i�T�O�O�j�G
�@AD5220_init()�G
�Ƃ��������ǂ��Ȃ̂��ȂƎv���܂����B
�@
�`�c�T�Q�Q�O�ɂ��ẮC�d���͑����ē��̂ŕs���ł����C
�o�v�l�R���g���[���̃{�����[���ƒu�������āC
���[�^�[�̃R���g���[���ŁC���f���Ă܂����C
���肵�Ȃ��Ƃ��́C���[�^�[�����Ȃ�������C
�������ŁC������ƃR���g���[�����ł���Ƃ��́C
�u�������O�̃{�����[���ł̃R���g���[���Ɠ������x�ɃR���g���[���ł��܂����B
���ŏ��ɁA���C�p����A�d���d���̔������o�͂���܂��H
�����C����C���킩������܂���B
�}�j���A���ɁC�ŏ��̓��C�p�[���C�U�S�̂Ƃ���ɂ���C�Ƃ̋L�q���������悤�Ɏv���܂��B
�����������܂������Ȃ��Ƃ̂��Ƃł����C
�o�v�l���������@���[�p�X�@�����@�o�h�b�i�`�c�ϊ��j�@�����@�`�c�T�Q�Q�O
�ł����ł��傤���B
�o�v�l�����ƃ��[�p�X���O���āC
�{�����[���i�Б��T�u�j���o�h�b�ڑ����Ă`�c�ϊ����Ă݂āC
���ʂ����Ă͂ǂ��ł��傤���B
����ƁC���g���̕��v���O�����́C�m���P�U�V�P�̂ł����B
�ύX���ĂȂ���C�������L�q���Cmain�@�̂Ȃ��ɂȂ��悤�ł����E�E�E�E�E�B
���������NjL�ł���������
��GND�ɂ��Ă���܂��B�@����ȏ�̕��@�͂ǂ����������@�Ȃ̂ł��傤���H
�Ӗ�����̂��͕�����܂��CCS�[�q���v���A�b�v��PIC�ɂȂ��ŁC
AD�T�Q�Q�O�̏������̑O�ɁC
�@RB�Q=�O;�iCS���Ȃ��ł���PIC�[�q�j
�@__delay_ms�i�T�O�O�j�G
�@AD5220_init()�G
�Ƃ��������ǂ��Ȃ̂��ȂƎv���܂����B
�@
mabo 2019/06/24(Mon) 22:47 No.1718
Re: �^���ϒ�R
 mabo����A���͂悤�������܂��B
mabo����A���͂悤�������܂��B�������X���肪�Ƃ��������܂��B
������ƁC���g���̕��v���O�����́C�m���P�U�V�P�̂ł����B
�ύX���ĂȂ���C�������L�q���Cmain�@�̂Ȃ��ɂȂ��悤�ł����E�E�E�E�E�B
���́ANo1671�͎g���Ă��܂���B
�S�����삵�܂���ł����B
main�̒��ɁA����������z�u���Ă��_���ł����B
���R�͕s���A�ꉞ�A�ҋ����b�N����Ƃ̂����ō�������e�ł����B
�����Ńv���O�����͍�蒼���܂����B
�ꉞ���삷��悤�ɂȂ�܂����B
No1671�Ƃ̍��́A�����̂́A����������lj������͓̂�����O�ł����A
5220�̓�����d�������Ƃ����̂��A���ǂ��̂����m��܂���B
�@�����A���ɂ���Ȃ��̂��A�s����ȂƂ��낪����̂ł��B
����s����ȏʐ^��t���܂����B
�ʐ^�E�́A5220�̓����d��������������Ԃł��āA
���̕ӂ̓����d������5220��On�ɂ���Ώ��������������܂��B
�����A5220��Off�ɂ��Ă��炩�Ȃ�҂��Ȃ���Ȃ�܂���B
�҂����Ԃ�Z�k������@������������̂ł����B
�@�҂����ԒZ�k�ɒ��ڊ�^���邩�ǂ����킩��܂��A
5220�̓d�����߂ɃI�C���R����t���܂����B�C�����ς�������ȁ`���x�ł��B
���̑��ɂ�������ƕȂ�����܂��B
���o�v�l�����ƃ��[�p�X���O���āC
�{�����[���i�Б��T�u�j���o�h�b�ڑ����Ă`�c�ϊ����Ă݂āC
���ʂ����Ă͂ǂ��ł��傤���B
��͂�Ǐ�͕ς��܂���B
���Ӗ�����̂��͕�����܂��CCS�[�q���v���A�b�v��PIC�ɂȂ��ŁC
AD�T�Q�Q�O�̏������̑O�ɁC
�@RB�Q=�O;�iCS���Ȃ��ł���PIC�[�q�j
�@__delay_ms�i�T�O�O�j�G
�@AD5220_init()�G
�Ƃ��������ǂ��Ȃ̂��ȂƎv���܂����B
�ꉞ�A����Ă��܂��B������A�O�L�v���O�����Ƃ̍��킹�Z��
5220��CS�[�q��GND�Ɍq���ł����܂��B
�ł��A5220��ON/O�����̌J��Ԃ��ɂ͑Ή��ł��܂���B
���ۂ̃t���C�X��ƂɎg���킯�ł����A5220��SS��SEC��Ɠ����d���ɂ���̂ŁA
����������On/Off�̘A������͂Ȃ��Ǝv���̂ŁA������߂āA���̒i�K�ɐi�������Ǝv�����Ă��܂��B
����@5220�̏Ⴉ�ȁA�v���O�������v�����B
TR 2019/06/25(Tue) 07:29 No.1719
Re: �^���ϒ�R
 mabo����A����ɂ��́B
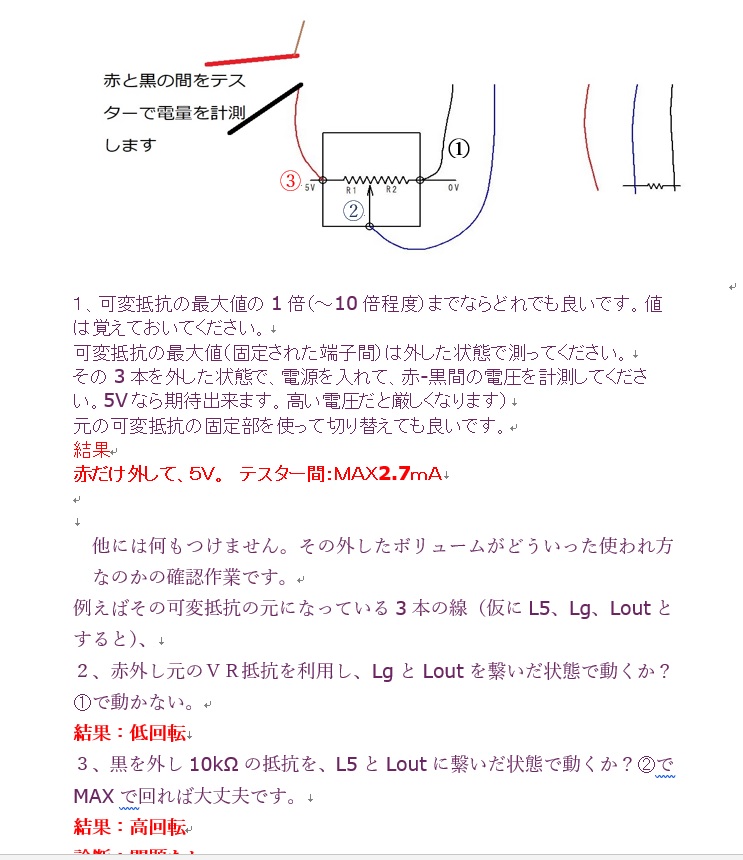
mabo����A����ɂ��́B����AML4�̉ϒ�R��̎g�����ׂ܂����B
�ʐ^�̒ʂ�ł��B
VR�͓d������̎g�����ł����B
�d���d���TV���@�ƇA�Ԃ̒�R�ɂ���ēd���������䂵�Ă���Ǝv���܂��B
��́A5220���g���āA�o���b�N�ł̃e�X�g�ł��B
�ꉞ�AML4�`�B�̓d�������ׂ܂������AMAX��2.7��A�ł����B
�Ԃ����O���āA�d�����m�F���܂����B�TV�ł��B
��A�����̉ϒ�R�ł����A�����R�X���X��
�^�Ԃ��ARV24YN 20S B502 127C
���炷���5����B�J�[�u�ł��B
�B�Ƈ@��{�̂���O���A�A�����̂܂܂ɂ��āA��R�l���v��������5.3���ł����B
�ł��Ă��ǂ����͂Ȃ��̂ŁA�����́A����ō�Ƃ͒��~���āA5220��M���Ă��܂��B
�z���}�Ȃ��`�F�b�N���܂��B
���łł��݂܂���B
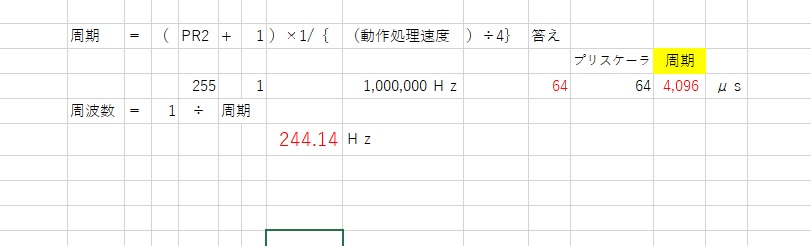
�v���O�����ł悭�A__delay_ms(500);���̂悤�ɏ����܂����A
���ۂƂ͂���Ă��銴�������܂��B
�����Ɠ������Ԃɂ���ɂ́A�ǂ��������v�Z������̂ł��傤���H
���肢���܂��B
TR 2019/06/25(Tue) 10:52 No.1720
Re: �^���ϒ�R
�s�q����C�ҋ����b�N����C�����́B
���v���O�����ł悭�A__delay_ms(500);���̂悤�ɏ����܂����A
�����ۂƂ͂���Ă��銴�������܂��B
�������Ɠ������Ԃɂ���ɂ́A�ǂ��������v�Z������̂ł��傤���H
�����肢���܂��B
���̕����́C�}�N���ŁC���̂悤�ɂȂ��Ă�悤�ł��B
#define __delay_us(x) _delay((unsigned long)((x)*(_XTAL_FREQ/4000000.0)))
us�̏ꍇ�C�v���O�����̖`���Ŏw�肵���C
�@#define�@8000000
�̃N���b�N����4000000�Ŋ����āCdelay�i�@�j������Ă�悤�ł��B
�悭������Ȃ��̂ł����C�����ƁC���m�ɂ���ɂ́C
�O���̃I�V���[�^�[�g������C���荞�ݎg�����肷���ł��傤���ˁB
���ꂩ��CNo1671�@�����Ȃ������Ƃ������ƂŁC�v���O����
���Ă݂܂����B
���ʂ̕����ł������ł���ˁB
���������āC�v���Ⴂ�������Ă邩������Ȃ��C�����܂��B
while (1) {
�@�@static unsigned int adc[32] = {0};
�@�@static char num = 0;
�@�@unsigned int target = 0;
�@�@adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
�@�@for (char i = 0; i < 32; i++)target += adc[i];
�@�@�@�@target = target >> 8;
�@�@if (target > AD5220_val) {
�@�@�@�@AD5220_up();
�@�@} else if (target < AD5220_val) {
�@�@AD5220_down(); //U/Ddown���Ăяo��
}
���̕����ł����C�R�Q���̔z���p�ӂ��āC
�@�@�@adc[0]�`adc[31]
�̂��ꂼ���ADC�ŕϊ������l��ǂݍ��ނ��ƂɂȂ��Ă܂��B
�����C���[�v�̒��̐擪�ŁC����Cadc[ ]�Cnum �C���O�ŏ��������Ă܂��B
���̌�ŁC
�@adc[(++num)&31] = adconv();
�����Ă܂��̂ŁC(++num)&31�@�̕����́C�@����@�P�@�ɂȂ��Ă��܂��̂ł͂Ǝv���܂��B
�ƂȂ�ƁC����ǂݎ�����l���Cadc[1]�ɕۑ�����邱�ƂɂȂ�C
���̂ق���adc[*]�iadc[0],adc[2],.......adc[30],adc[31],�j�́C
�����������C�O�@�ɂȂ�Ǝv���܂��B
����ŁC�������R�Q�̕��ςɂȂ�Ȃ��悤�ȋC�����܂��B
���̂悤�ɂ���C�R�Q�̃f�[�^�̕��ςɂȂ�̂��ȂƎv���܂��B
=========
�@�@static unsigned int adc[32] = {0};//while���̊O�ŏ�����
�@�@static char num = 0;//while���̊O�ŏ�����
while (1) {
�@�@target = 0;
�@�@if(num==32){
�@�@�@�Hadc[32] = {0};
�@�@�@num = 0;�@�@�@
�@�@}
�@�@adc[num++] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
�@�@for (char i = 0; i < 32; i++)target += adc[i];
�@�@�@�@target = target >> 8;
�@�@if (target > AD5220_val) {
�@�@�@�@AD5220_up();
�@�@} else if (target < AD5220_val) {
�@�@AD5220_down(); //U/Ddown���Ăяo��
}
========
if(num==32)�@�̒��ɁC
�@�@adc[32] = {0};
������ƁC����C�R�Q�ƂɁC�܂�����ȏ�ԂŁC
���ς���邱�ƂɂȂ�Ǝv���܂��B
��������Ȃ��ƁC��ԌÂ��f�[�^�̈�ƁC��ԐV�����f�[�^�[�̈�����ւ��āC
��ɁC���ς��o�����ƂɂȂ�Ǝv���܂��B
�ǂ��炪�����̂�������܂��C
�l�I�ɂ́C��ԌÂ��f�[�^�[�ƁC��ԐV�����f�[�^�[�����ւ��Čv�Z����̂��C�����̂��ȁC�Ǝv���܂��B
�܂��C�m�F���Ă܂��C�m���߂Ă݂����Ǝv���܂��B
�@
���v���O�����ł悭�A__delay_ms(500);���̂悤�ɏ����܂����A
�����ۂƂ͂���Ă��銴�������܂��B
�������Ɠ������Ԃɂ���ɂ́A�ǂ��������v�Z������̂ł��傤���H
�����肢���܂��B
���̕����́C�}�N���ŁC���̂悤�ɂȂ��Ă�悤�ł��B
#define __delay_us(x) _delay((unsigned long)((x)*(_XTAL_FREQ/4000000.0)))
us�̏ꍇ�C�v���O�����̖`���Ŏw�肵���C
�@#define�@8000000
�̃N���b�N����4000000�Ŋ����āCdelay�i�@�j������Ă�悤�ł��B
�悭������Ȃ��̂ł����C�����ƁC���m�ɂ���ɂ́C
�O���̃I�V���[�^�[�g������C���荞�ݎg�����肷���ł��傤���ˁB
���ꂩ��CNo1671�@�����Ȃ������Ƃ������ƂŁC�v���O����
���Ă݂܂����B
���ʂ̕����ł������ł���ˁB
���������āC�v���Ⴂ�������Ă邩������Ȃ��C�����܂��B
while (1) {
�@�@static unsigned int adc[32] = {0};
�@�@static char num = 0;
�@�@unsigned int target = 0;
�@�@adc[(++num)&31] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
�@�@for (char i = 0; i < 32; i++)target += adc[i];
�@�@�@�@target = target >> 8;
�@�@if (target > AD5220_val) {
�@�@�@�@AD5220_up();
�@�@} else if (target < AD5220_val) {
�@�@AD5220_down(); //U/Ddown���Ăяo��
}
���̕����ł����C�R�Q���̔z���p�ӂ��āC
�@�@�@adc[0]�`adc[31]
�̂��ꂼ���ADC�ŕϊ������l��ǂݍ��ނ��ƂɂȂ��Ă܂��B
�����C���[�v�̒��̐擪�ŁC����Cadc[ ]�Cnum �C���O�ŏ��������Ă܂��B
���̌�ŁC
�@adc[(++num)&31] = adconv();
�����Ă܂��̂ŁC(++num)&31�@�̕����́C�@����@�P�@�ɂȂ��Ă��܂��̂ł͂Ǝv���܂��B
�ƂȂ�ƁC����ǂݎ�����l���Cadc[1]�ɕۑ�����邱�ƂɂȂ�C
���̂ق���adc[*]�iadc[0],adc[2],.......adc[30],adc[31],�j�́C
�����������C�O�@�ɂȂ�Ǝv���܂��B
����ŁC�������R�Q�̕��ςɂȂ�Ȃ��悤�ȋC�����܂��B
���̂悤�ɂ���C�R�Q�̃f�[�^�̕��ςɂȂ�̂��ȂƎv���܂��B
=========
�@�@static unsigned int adc[32] = {0};//while���̊O�ŏ�����
�@�@static char num = 0;//while���̊O�ŏ�����
while (1) {
�@�@target = 0;
�@�@if(num==32){
�@�@�@�Hadc[32] = {0};
�@�@�@num = 0;�@�@�@
�@�@}
�@�@adc[num++] = adconv(); // �A�i���O�l�̕ϊ����Ăяo���Ɣz��ɂ��AD�ϊ��l����
�@�@for (char i = 0; i < 32; i++)target += adc[i];
�@�@�@�@target = target >> 8;
�@�@if (target > AD5220_val) {
�@�@�@�@AD5220_up();
�@�@} else if (target < AD5220_val) {
�@�@AD5220_down(); //U/Ddown���Ăяo��
}
========
if(num==32)�@�̒��ɁC
�@�@adc[32] = {0};
������ƁC����C�R�Q�ƂɁC�܂�����ȏ�ԂŁC
���ς���邱�ƂɂȂ�Ǝv���܂��B
��������Ȃ��ƁC��ԌÂ��f�[�^�̈�ƁC��ԐV�����f�[�^�[�̈�����ւ��āC
��ɁC���ς��o�����ƂɂȂ�Ǝv���܂��B
�ǂ��炪�����̂�������܂��C
�l�I�ɂ́C��ԌÂ��f�[�^�[�ƁC��ԐV�����f�[�^�[�����ւ��Čv�Z����̂��C�����̂��ȁC�Ǝv���܂��B
�܂��C�m�F���Ă܂��C�m���߂Ă݂����Ǝv���܂��B
�@
mabo 2019/06/25(Tue) 21:31 No.1721
Re: �^���ϒ�R
mabo����A���͂悤�������܂��B
����������������������������Ȃ��̂ŁA���������܂��B
5220�쓮�v���O������ʂ��āAdelay���ŋC�t��������܂����B
��ł́A
mabo����́A�����������ɋL�ڂ��Ă���
__delay_ms(500);
__delay_ms(500);
����2�s�ł��B
����500�́A���̊��o�ł́A0.5�b�ł���ˁB��ċz�����Ȋ����i��
�ŁA
delay500��2�s�Ȃ̂ŁA1�b�o�߂��Ă���A�������ƂȂ�B
�������̗l�q���e�X�^�[�Ŋώ@����ƁA�l�q��������܂����B
���Ă���ƁA1�b��肸���Ԃ�o�߂�����ɏ��������Ă��銴���ł����B
�����ŁA�����̐ݒ���@�������̂ł͂ƁA�^��������܂����B
�����ŁAmabo����ɂ��������܂����B
�ȉ��̒ʂ�l���Ă��܂����B�Ԉ���Ă��܂����H
�����̏ꍇ�̐ݒ���@
�E#pragma config FOSC = INTOSC �œ����N���b�N���g�p����B
�E#define _XTAL_FREQ 16000000�@�����ŁA�}�C�R���̓��쑬�x���N���b�N��16��Hz�Ɛݒ�
��́Adelay�����g���A�i�j���Ɏw�肷�鐔�l�i���ԁj���~�߂邱�Ƃ��ł���Ǝv���Ă��܂���
�B
��
__delay_ms(500);�@��0.5�b�҂�
�z����̕��́A�������čl���Ă݂܂��B�ȂA�e�X�^�[�̓��������������ł��B
���`�A������ML4�Ńe�X�g�Ƃ����i���ς݂ł������A
����܂��ˁB
>���ꂩ��CNo1671�@�����Ȃ������Ƃ������ƂŁC�v���O����
���Ă݂܂����B
������5220�̏Ⴕ�Ă��邩���B���̐��ʂ��B
����������������������������������������
�NjL
mabo����ɂ��́B
��adc[(++num)&31] = adconv();
����̓��A���R�P�́A10�i����11111
�������邩��0��11111�Ɠǂݑւ�����悤�ł��ˁH
���[�v��1���ڂł�����
adc[0]&0b11111�Ń}�X�N��������āAadc[1]�ƂȂ�̂��ȁB
[]���́A�����Ȃ�ł��ˁA�����肸�炢�I
����������������������������Ȃ��̂ŁA���������܂��B
5220�쓮�v���O������ʂ��āAdelay���ŋC�t��������܂����B
��ł́A
mabo����́A�����������ɋL�ڂ��Ă���
__delay_ms(500);
__delay_ms(500);
����2�s�ł��B
����500�́A���̊��o�ł́A0.5�b�ł���ˁB��ċz�����Ȋ����i��
�ŁA
delay500��2�s�Ȃ̂ŁA1�b�o�߂��Ă���A�������ƂȂ�B
�������̗l�q���e�X�^�[�Ŋώ@����ƁA�l�q��������܂����B
���Ă���ƁA1�b��肸���Ԃ�o�߂�����ɏ��������Ă��銴���ł����B
�����ŁA�����̐ݒ���@�������̂ł͂ƁA�^��������܂����B
�����ŁAmabo����ɂ��������܂����B
�ȉ��̒ʂ�l���Ă��܂����B�Ԉ���Ă��܂����H
�����̏ꍇ�̐ݒ���@
�E#pragma config FOSC = INTOSC �œ����N���b�N���g�p����B
�E#define _XTAL_FREQ 16000000�@�����ŁA�}�C�R���̓��쑬�x���N���b�N��16��Hz�Ɛݒ�
��́Adelay�����g���A�i�j���Ɏw�肷�鐔�l�i���ԁj���~�߂邱�Ƃ��ł���Ǝv���Ă��܂���
�B
��
__delay_ms(500);�@��0.5�b�҂�
�z����̕��́A�������čl���Ă݂܂��B�ȂA�e�X�^�[�̓��������������ł��B
���`�A������ML4�Ńe�X�g�Ƃ����i���ς݂ł������A
����܂��ˁB
>���ꂩ��CNo1671�@�����Ȃ������Ƃ������ƂŁC�v���O����
���Ă݂܂����B
������5220�̏Ⴕ�Ă��邩���B���̐��ʂ��B
����������������������������������������
�NjL
mabo����ɂ��́B
��adc[(++num)&31] = adconv();
����̓��A���R�P�́A10�i����11111
�������邩��0��11111�Ɠǂݑւ�����悤�ł��ˁH
���[�v��1���ڂł�����
adc[0]&0b11111�Ń}�X�N��������āAadc[1]�ƂȂ�̂��ȁB
[]���́A�����Ȃ�ł��ˁA�����肸�炢�I
TR 2019/06/26(Wed) 06:51 No.1722
Re: �^���ϒ�R
> TR����
�������ɂ������܂������ǁA
OSCCON = 0b0111001; //�N���b�N���g����16MHz�ɐݒ�
���Ⴂ�܂��B����ł�PIC�������܂���B
���ԈႢ�̓����Ă��錳���X���C�����Ă����������ǂ��ł��B
�R�s�y���Ďg���\��������܂�����B
�NjL���Ă����܂��B
���̕��̃v���O�����̊����
#define _XTAL_FREQ
�Ǝ����g��������������Ă��܂���B
��{�I��MABO����Ɠ������g���i�v���O�����O�����j�ɂ��������ǂ��Ǝv���܂��B
�������ɂ������܂������ǁA
OSCCON = 0b0111001; //�N���b�N���g����16MHz�ɐݒ�
���Ⴂ�܂��B����ł�PIC�������܂���B
���ԈႢ�̓����Ă��錳���X���C�����Ă����������ǂ��ł��B
�R�s�y���Ďg���\��������܂�����B
�NjL���Ă����܂��B
���̕��̃v���O�����̊����
#define _XTAL_FREQ
�Ǝ����g��������������Ă��܂���B
��{�I��MABO����Ɠ������g���i�v���O�����O�����j�ɂ��������ǂ��Ǝv���܂��B
�ҋ����b�N 2019/06/26(Wed) 07:38 No.1723
Re: �^���ϒ�R
mabo����A�����Ď��炵�܂��B
���̂Ƃ���ł����ȉ��̂悤�ɂ��܂����B
���삵�Ă��܂��B
���̕��ɂ���__delay_ms(1);�́A�T���v�����O�Ԋu�ł��B
�ҋ����b�N����Ɍ����Ă��܂����B
PWM��{���g���ƊW���邻���ł��B
���C�p�`Rl�Ԃ̓d�������Ă���Ɩʔ����ł��B
Sw ON�Ŗ�250�����AVR�ڈ�t�J���āA���̌�A�ڈ�t�߂��130�����ɂȂ�܂��B
���������A�_�E�����̕����A���C�p�ꂪ�������Ă���悤�Ɋ����܂��B
���삵�Ă���Ɩʔ����Ȃ��Ă��܂��B
AD5220��2�lj����܂����B
�@�@�@�L
while (1) {
static unsigned int adc[64] = {0};
static char num = 0;
unsigned int target = 0;
for (char i = 0; i < 64; i++)adc[i] = adconv();���@�z��adc[0]�`�ɂ�������
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
AD5220_down(); //down���Ăяo��
}
__delay_ms(1);
}
�NjL
����PIC(PWM�����j�̐M�������Ƃ�5220���쓮����e�X�g�i�K�ɓ���܂����B
���ʁA�R���f���T��20��F�A75�����ǂ������ł��B
����ƁA5220�쓮�v���O�����̓��A
�T���v�����O�Ԋu�́APWH��{���g��244Hz�ł���Ă��܂����A
__delay_us(244)���ǂ������ł��B
���̂Ƃ���ł����ȉ��̂悤�ɂ��܂����B
���삵�Ă��܂��B
���̕��ɂ���__delay_ms(1);�́A�T���v�����O�Ԋu�ł��B
�ҋ����b�N����Ɍ����Ă��܂����B
PWM��{���g���ƊW���邻���ł��B
���C�p�`Rl�Ԃ̓d�������Ă���Ɩʔ����ł��B
Sw ON�Ŗ�250�����AVR�ڈ�t�J���āA���̌�A�ڈ�t�߂��130�����ɂȂ�܂��B
���������A�_�E�����̕����A���C�p�ꂪ�������Ă���悤�Ɋ����܂��B
���삵�Ă���Ɩʔ����Ȃ��Ă��܂��B
AD5220��2�lj����܂����B
�@�@�@�L
while (1) {
static unsigned int adc[64] = {0};
static char num = 0;
unsigned int target = 0;
for (char i = 0; i < 64; i++)adc[i] = adconv();���@�z��adc[0]�`�ɂ�������
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
AD5220_down(); //down���Ăяo��
}
__delay_ms(1);
}
�NjL
����PIC(PWM�����j�̐M�������Ƃ�5220���쓮����e�X�g�i�K�ɓ���܂����B
���ʁA�R���f���T��20��F�A75�����ǂ������ł��B
����ƁA5220�쓮�v���O�����̓��A
�T���v�����O�Ԋu�́APWH��{���g��244Hz�ł���Ă��܂����A
__delay_us(244)���ǂ������ł��B
TR 2019/06/26(Wed) 16:53 No.1724
Re: �^���ϒ�R
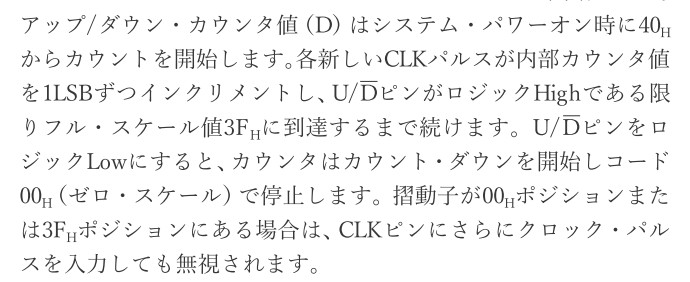 > MABO����
> MABO�����Y�t�}��AD5220�̓��{��f�[�^�V�[�gP8�ɋL�ڂ���Ă�����̂ł��B
�����ł́A
�E�p���[�I������40H�i��64�j����J�E���g���J�n����B
�E�N���b�N�������1LSB(�ŏ��P��)���C���N�������g����B
�EUD�s����HIGH�Ȃ�t���X�P�[���l3FH�i63�j�܂œ����ALOW�Ȃ�
�@00H�i�[���E�X�P�[���j�܂œ����A�ǂ��������ȏ�̃N���b�N�͖��������B
�Ə����Ă���܂��B
���́A�u3FH�v��7FH�i127�j�̌�A�H�Ȃ̂��낤�Ǝv���Ă����̂ł����ǁA
�����ł͂Ȃ��A�l�������Ԉ���Ă���̂�������܂���B
����A���̓_�͌�A�Ȃ̂�������܂��ǁA�ő�l�Ƃ������A�|�W�V�����͂����ŁA
7FH���Ǝv���Ă����̂ł����ǁA�{����80H�i128�j�܂ł����āA129�|�W�V�����Ȃ̂�������܂���B
��X9C�̕��͒�R��99�����āA100�|�W�V�����ƂȂ��Ă���̂ŊԈႢ�͂Ȃ��Ǝv���܂��B
���łɌ����A1�y�[�W�ɂ���A
�u�}2b�D�t���E�X�P�[���E�A�b�v/�_�E���E�J�E���g�v�Ƃ����^�C�g���̔g�`�}�ł����ǁA
�^�C�g�����炷��A��ԏォ���ԉ��܂ňړ������Ă���A�Ƃ����悤�ɓǂ߂܂����ǁA
���̐}���̕\�L�́uCOUNT 00H��3FH��00H�v�܂�A0��63��0�Ȃ�ł���ˁB
���̂�������H�H�H�ł��B
���̍��ɖڂ��������
�u�i�Ⴆ�AR STEP ��10 k��/128��78 W�j�v�ƂȂ��Ă��܂��B
������A�u78���v�������́u78��/W�i���C�p�[�j�v���Ǝv���̂ł����ǁA�P�ʂ͂Ƃ������A
�v�Z���Ɋւ��Ă̓f�[�^�V�[�g��ł�128��R����悤�ɏ����Ă���悤�ł��B
�Ԃ����Ⴏ�A���삵�Ȃ��̂Ȃ�A���܂�f�[�^�V�[�g�i�̐��l�j�����ĂɂȂ�Ȃ��̂�������܂���B
���ۂɎ����Ă݂邵���Ȃ����������肻���ł��B
���ƒ��ӎ����ł����ǁA�z�[���y�[�W��FAQ��
Q�F �f�o�C�X�̓d����off�̎��ɁAW�i���C�p�[�j��A�AB�[�q�ɓd����������邱�Ƃ͉\�ł����H�iGND�͋��ʁj
A�F �X�g���X�ɂ��j��댯������܂��̂ŁA�s�ł��B
�ƂȂ��Ă��܂��B�q�����Ԃ����āA�鏇�Ԃ��l������K�v������܂��ˁB�ǂ̒��x�V�r�A�ȗv���Ȃ̂��͔���܂��ǁB
�ҋ����b�N 2019/06/26(Wed) 17:06 No.1725
Re: �^���ϒ�R
�s�q����C�ҋ����b�N����C�����́B
�����������ҋ����b�N��������������
�ҋ����b�N����C�ڂ����l�@���肪�Ƃ��������܂����B
���̕ӁC���C���߂Ȃ�ł���ˁB
���܂�ǂ肵�Ȃ��̂ŁE�E�E�E�E�E�E�B
���ɂȂ�܂��B
����ƁC��͂�CON�@OFF�@�̃V�[�P���X��C
�ڑ��@��Ƃ̐ڑ��̃V�[�P���X�C���܂ŁC�ׂ�����������悤�Ȃ�ł��ˁB
���낢��C�ʓ|�ł��ˁB
���������s�q����������
�������̏ꍇ�̐ݒ���@
���E#pragma config FOSC = INTOSC �œ����N���b�N���g�p����B
�E#define _XTAL_FREQ 16000000�@�����ŁA�}�C�R���̓��쑬�x���N���b�N��16��Hz�Ɛݒ�
����́Adelay�����g���A�i�j���Ɏw�肷�鐔�l�i���ԁj���~�߂邱�Ƃ��ł���Ǝv���Ă��܂���
�ҋ����b�N������������Ă��悤�ɁC�n�r�b�b�n�m�̐ݒ������悤�ł��ˁB
����C���������ݒ肳��ĂȂ��ƁC���������āC������������C�x���������肷�邩���ł��ˁB
���ꂩ��C�NjL��
����adc[(++num)&31] = adconv();
�ł����Cnum�@���@�R�Q�ȏ�ɂȂ�Ȃ����߂̏������Ǝv���܂��B
�܂��C++num�@�ŁCnum�@���@�{�P�@����āC
���̌�ƁC�R�P�Ƃ́��������Ɨ������܂����B
num�@���@�R�Q�@�ȏ�ɂȂ������C�u���v�̏����ŁC
�@�@�O���O
�@�@�P���P
�@�@�E
�@�@�E
�@�@�R�P���R�P
�@�@�R�Q���O
�@�@�R�R���P
�̂悤�ɂȂ�Ǝv���܂��B
�v���O�����̗���ł́C
num�@�́@num���O�@�Ŗ`���ɏ���������Ă܂��̂ŁC
++num�@�łO�ɂP�Ƀv���X����āC
num�@�Ɂ@�P�@������C�@���@���@���{�����Ɨ������܂����B
�@
num++�@���Ɓ@����������Ńv���X�����̂ŁC
�unum�̂O�v�ƂR�P�́������ꂽ��ŁCnum���@�P�@�ɂȂ�Ɨ������Ă܂����B
�����C������ƁC�����s���ɂȂ�Ƃ���ł��B
����ŁC�����Ƃ��́C�����C
�@adc[num�@&�@31] = adconv();
�@�@�@num++;
���C
�@�@�@num++;
�@adc[num�@&�@31] = adconv();
�݂����ɁC�����I�ɏ����Ă܂��B
�������Ȃ��Ɨ����ł��Ȃ��̂ŁC���ア�̂��ȂƎv���Ă܂��B�i�j
���̗����C�Ԉ���Ă��邩������܂���B
���ꂩ��C�v���O�����ł����C�U�S��̃T���v�����O�ł��ˁB
for (char i = 0; i < 64; i++)adc[i] = adconv();���@�z��adc[0]�`�ɂ�������
for (char i = 0; i < 64; i++)target += adc[i];
���̕����C
for (char i = 0; i < 64; i++)�o
�@adc[i] = adconv();
�@target += adc[i];
�p
�݂����ɁC��ɂ���ƁC�����C�����̎��Ԃłł��܂��B
����ƁC�D�݂̖��Ȃ̂ł����C�ォ��̃f�o�b�N�̂��₷���l����ƁC
�o�@�p
���ȗ����Ȃ��ŏ��������C���́C�D�݂ł��B
�ȗ����ď����ƁC��Ŋm���߂�Ƃ��C�͈͂��B���ɂȂ��āC
�����ł��ȂȂ��Ȃ��Ă��܂��܂��B
��͂蓪�����ł��B�i�j
�����삵�Ă���Ɩʔ����Ȃ��Ă��܂��B
��AD5220��2�lj����܂����B
���肵�āC���삷��悤�ɂȂ�����ł��傤���B
����ƁC���邭�Ȃ��Ă��܂������ˁB
�@�@�@
�����������ҋ����b�N��������������
�ҋ����b�N����C�ڂ����l�@���肪�Ƃ��������܂����B
���̕ӁC���C���߂Ȃ�ł���ˁB
���܂�ǂ肵�Ȃ��̂ŁE�E�E�E�E�E�E�B
���ɂȂ�܂��B
����ƁC��͂�CON�@OFF�@�̃V�[�P���X��C
�ڑ��@��Ƃ̐ڑ��̃V�[�P���X�C���܂ŁC�ׂ�����������悤�Ȃ�ł��ˁB
���낢��C�ʓ|�ł��ˁB
���������s�q����������
�������̏ꍇ�̐ݒ���@
���E#pragma config FOSC = INTOSC �œ����N���b�N���g�p����B
�E#define _XTAL_FREQ 16000000�@�����ŁA�}�C�R���̓��쑬�x���N���b�N��16��Hz�Ɛݒ�
����́Adelay�����g���A�i�j���Ɏw�肷�鐔�l�i���ԁj���~�߂邱�Ƃ��ł���Ǝv���Ă��܂���
�ҋ����b�N������������Ă��悤�ɁC�n�r�b�b�n�m�̐ݒ������悤�ł��ˁB
����C���������ݒ肳��ĂȂ��ƁC���������āC������������C�x���������肷�邩���ł��ˁB
���ꂩ��C�NjL��
����adc[(++num)&31] = adconv();
�ł����Cnum�@���@�R�Q�ȏ�ɂȂ�Ȃ����߂̏������Ǝv���܂��B
�܂��C++num�@�ŁCnum�@���@�{�P�@����āC
���̌�ƁC�R�P�Ƃ́��������Ɨ������܂����B
num�@���@�R�Q�@�ȏ�ɂȂ������C�u���v�̏����ŁC
�@�@�O���O
�@�@�P���P
�@�@�E
�@�@�E
�@�@�R�P���R�P
�@�@�R�Q���O
�@�@�R�R���P
�̂悤�ɂȂ�Ǝv���܂��B
�v���O�����̗���ł́C
num�@�́@num���O�@�Ŗ`���ɏ���������Ă܂��̂ŁC
++num�@�łO�ɂP�Ƀv���X����āC
num�@�Ɂ@�P�@������C�@���@���@���{�����Ɨ������܂����B
�@
num++�@���Ɓ@����������Ńv���X�����̂ŁC
�unum�̂O�v�ƂR�P�́������ꂽ��ŁCnum���@�P�@�ɂȂ�Ɨ������Ă܂����B
�����C������ƁC�����s���ɂȂ�Ƃ���ł��B
����ŁC�����Ƃ��́C�����C
�@adc[num�@&�@31] = adconv();
�@�@�@num++;
���C
�@�@�@num++;
�@adc[num�@&�@31] = adconv();
�݂����ɁC�����I�ɏ����Ă܂��B
�������Ȃ��Ɨ����ł��Ȃ��̂ŁC���ア�̂��ȂƎv���Ă܂��B�i�j
���̗����C�Ԉ���Ă��邩������܂���B
���ꂩ��C�v���O�����ł����C�U�S��̃T���v�����O�ł��ˁB
for (char i = 0; i < 64; i++)adc[i] = adconv();���@�z��adc[0]�`�ɂ�������
for (char i = 0; i < 64; i++)target += adc[i];
���̕����C
for (char i = 0; i < 64; i++)�o
�@adc[i] = adconv();
�@target += adc[i];
�p
�݂����ɁC��ɂ���ƁC�����C�����̎��Ԃłł��܂��B
����ƁC�D�݂̖��Ȃ̂ł����C�ォ��̃f�o�b�N�̂��₷���l����ƁC
�o�@�p
���ȗ����Ȃ��ŏ��������C���́C�D�݂ł��B
�ȗ����ď����ƁC��Ŋm���߂�Ƃ��C�͈͂��B���ɂȂ��āC
�����ł��ȂȂ��Ȃ��Ă��܂��܂��B
��͂蓪�����ł��B�i�j
�����삵�Ă���Ɩʔ����Ȃ��Ă��܂��B
��AD5220��2�lj����܂����B
���肵�āC���삷��悤�ɂȂ�����ł��傤���B
����ƁC���邭�Ȃ��Ă��܂������ˁB
�@�@�@
mabo 2019/06/26(Wed) 22:00 No.1726
Re: �^���ϒ�R
mabo���͂悤�������܂��B
5220�̓d����ON/OFF�̏��Ԃ́A�����ł��B
�������ߋ��ɁAON/OFF�̏��Ԃ���ȁ`�Ɗ����āA��������ł���܂��B
�ł��A�������������ӓ_�́A�����̉ߋ��̌o���ŁA�����������ƂŁA�f�o�C�X�̐������ɂ͂Ȃ��Ǝv���܂����B
���ҋ����b�N������������Ă��悤�ɁC�n�r�b�b�n�m�̐ݒ������悤�ł��ˁB
�����ł������A���L�̒ʂ�ł��ˁA�ŏ����������Ă���̂�������܂���ł����B
���Amabo����Ɍ����āA������܂����A�ł����ۂ́A���x���A�f�[�^�V�[�g�����āA�m�F���Ă����̂ŁA
���̊Ԃɂ��A�����Ă��܂����B�@�����������n���Ȑςݏd�˂ŁA���͓��삵�Ă��܂��B
�f�l�ɂ́A���J�ɐ������Ă���Ȃ��Ɖ��������Ă���̂��悭������܂���I�I
mabo����A�������J�Ȑ����Ɋ��ӂ��܂��B
mabo����Ƃ̃R�~���j�P�[�V�����ɂ̓X�g���X������܂���I�I�I�I
�C�������܂��ˁI�I�I
�@�@�@�L
OSCCON�ɂ���
���@���FOSCCON = 0b0111001; //�N���b�N���g����16MHz�ɐݒ�
�ύX��FOSCCON = 0b01110010; //�N���b�N���g����16MHz�ɐݒ�
��num++;
�@adc[num�@&�@31] = adconv();
�݂����ɁC�����I�ɏ����Ă܂��B
�������Ȃ��Ɨ����ł��Ȃ��̂ŁC���ア�̂��ȂƎv���Ă܂��B�i�j
���̕����ł����A���s�̂܂܂���
���s
����adc[(++num)&31] = adconv();
�ʖڂ��ƕ�����܂����B
�R�Q�ɂ��Ȃ��ƑʖځI
�ł��A
32�ɂ���ƁA32��2�i����100000�A�Ȃ̂�
10000��32�@
������A���������ă}�X�N��������A��0��11�Ɠ����ɂȂ�Ƃ��B
�܂�A00
�Ȃ̂ŁA
�����z��̏��Ԃ́A
adc[1],adc[2]�`adc[0]�ƂȂ�A
�ł��A�z��ɏ��Ԃ��A�Ō�ɂO�����āAadc[0]�Ɉ�ԍŌ�ɃT���v�����O���ꂽ�l������̂ŁA
�T���v�����O�ɂ�蕽�ϒl���o���Ƃ����l���ƍ����Ă���̂��H�H�Ǝv���܂����A
�ǂ����Ȃ��Ċ����ł��B�@������肵�Ă���̂ŗǂ��悤�ȋC�����܂��B
mabo����́A�ǂ��v���܂����H�H
�e�X�^�[�̐��l�����Ă���ƁA�X���[�X����Ȃ���ł���B
�v���O���������ł͖����Ȃ̂��ȁB
�܂�A
�T���v�����O�����Ԋu�ŁA�Ƃ��Ă��Ă��钆�AVR���ς��ƁA�}篁AUP/DOWN�����A
���ꂪ�I���ƁA�܂��A�T���v�����O������@�Ƃ�������ł���I�H
�e�X�^�[�̐��l�����炩�ɓ����Ȃ��̂́A�����������v�Z�����̏��ׂ��Ȃ��Ďv���܂��B
mabo���������Ă݂Ă��������B
����ƁA�����̏ꍇ�A���̂܂܂���A�R���p�C���ł��܂���ł����B
�������ς������e�́A���L�̂Ƃ���ł��B
target1�Ƃ��Atarget�ƕ����邱�Ƃɂ���āA���肵�܂����B
�@�@�@�L
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;__delay_us(250);//PWM�T���v�����O�Ԋu
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
��for (char i = 0; i < 64; i++)�o
�@adc[i] = adconv();
�@target += adc[i];
�p
�L��������܂��B
���̕������₷���ł��ˁA���A���̂悤�ɂ��܂����B
���łɁA
for���ɂ��ĉ��߂������ĉ������B
�L�b�g�ŗV�ڂ���蔲���@��
��������������������������������������
���������̒l���ω����ɂ���ĕω�������A�p�����������^�Ȃ�Ώ������J��Ԃ����s�B
�p�����������U�Ȃ�A�����͎��s����Ȃ��B
������������������������������������
for���ɗ������A�p�������������ׂĎ��{������A����ƁAfor�����邱�Ƃ��ł���̂ł��傤���H�H�H�H
�����ɂȂ�܂������A���e�͊肢�܂��B
�ŁA
���[�p�X�̒��ӓ_������܂��B
10�ʂ�22�����ƁA��R���傫�����āA�d�������������x�������傫�����܂��B
�����́A���́A�V�T���ɂ��A���̕��A�R���f���T10�ʂ�2����ɂ��Ă��܂��B����ɂ���āA�R���f���T�e�ʂ�2�{�ɂȂ�B
5220�̓d����ON/OFF�̏��Ԃ́A�����ł��B
�������ߋ��ɁAON/OFF�̏��Ԃ���ȁ`�Ɗ����āA��������ł���܂��B
�ł��A�������������ӓ_�́A�����̉ߋ��̌o���ŁA�����������ƂŁA�f�o�C�X�̐������ɂ͂Ȃ��Ǝv���܂����B
���ҋ����b�N������������Ă��悤�ɁC�n�r�b�b�n�m�̐ݒ������悤�ł��ˁB
�����ł������A���L�̒ʂ�ł��ˁA�ŏ����������Ă���̂�������܂���ł����B
���Amabo����Ɍ����āA������܂����A�ł����ۂ́A���x���A�f�[�^�V�[�g�����āA�m�F���Ă����̂ŁA
���̊Ԃɂ��A�����Ă��܂����B�@�����������n���Ȑςݏd�˂ŁA���͓��삵�Ă��܂��B
�f�l�ɂ́A���J�ɐ������Ă���Ȃ��Ɖ��������Ă���̂��悭������܂���I�I
mabo����A�������J�Ȑ����Ɋ��ӂ��܂��B
mabo����Ƃ̃R�~���j�P�[�V�����ɂ̓X�g���X������܂���I�I�I�I
�C�������܂��ˁI�I�I
�@�@�@�L
OSCCON�ɂ���
���@���FOSCCON = 0b0111001; //�N���b�N���g����16MHz�ɐݒ�
�ύX��FOSCCON = 0b01110010; //�N���b�N���g����16MHz�ɐݒ�
��num++;
�@adc[num�@&�@31] = adconv();
�݂����ɁC�����I�ɏ����Ă܂��B
�������Ȃ��Ɨ����ł��Ȃ��̂ŁC���ア�̂��ȂƎv���Ă܂��B�i�j
���̕����ł����A���s�̂܂܂���
���s
����adc[(++num)&31] = adconv();
�ʖڂ��ƕ�����܂����B
�R�Q�ɂ��Ȃ��ƑʖځI
�ł��A
32�ɂ���ƁA32��2�i����100000�A�Ȃ̂�
10000��32�@
������A���������ă}�X�N��������A��0��11�Ɠ����ɂȂ�Ƃ��B
�܂�A00
�Ȃ̂ŁA
�����z��̏��Ԃ́A
adc[1],adc[2]�`adc[0]�ƂȂ�A
�ł��A�z��ɏ��Ԃ��A�Ō�ɂO�����āAadc[0]�Ɉ�ԍŌ�ɃT���v�����O���ꂽ�l������̂ŁA
�T���v�����O�ɂ�蕽�ϒl���o���Ƃ����l���ƍ����Ă���̂��H�H�Ǝv���܂����A
�ǂ����Ȃ��Ċ����ł��B�@������肵�Ă���̂ŗǂ��悤�ȋC�����܂��B
mabo����́A�ǂ��v���܂����H�H
�e�X�^�[�̐��l�����Ă���ƁA�X���[�X����Ȃ���ł���B
�v���O���������ł͖����Ȃ̂��ȁB
�܂�A
�T���v�����O�����Ԋu�ŁA�Ƃ��Ă��Ă��钆�AVR���ς��ƁA�}篁AUP/DOWN�����A
���ꂪ�I���ƁA�܂��A�T���v�����O������@�Ƃ�������ł���I�H
�e�X�^�[�̐��l�����炩�ɓ����Ȃ��̂́A�����������v�Z�����̏��ׂ��Ȃ��Ďv���܂��B
mabo���������Ă݂Ă��������B
����ƁA�����̏ꍇ�A���̂܂܂���A�R���p�C���ł��܂���ł����B
�������ς������e�́A���L�̂Ƃ���ł��B
target1�Ƃ��Atarget�ƕ����邱�Ƃɂ���āA���肵�܂����B
�@�@�@�L
for (char i = 0; i < 64; i++)target += adc[i];
target1 = target / 511.5;__delay_us(250);//PWM�T���v�����O�Ԋu
if (target1 > AD5220_val) {
AD5220_up();
} else if (target1 < AD5220_val) {
��for (char i = 0; i < 64; i++)�o
�@adc[i] = adconv();
�@target += adc[i];
�p
�L��������܂��B
���̕������₷���ł��ˁA���A���̂悤�ɂ��܂����B
���łɁA
for���ɂ��ĉ��߂������ĉ������B
�L�b�g�ŗV�ڂ���蔲���@��
��������������������������������������
���������̒l���ω����ɂ���ĕω�������A�p�����������^�Ȃ�Ώ������J��Ԃ����s�B
�p�����������U�Ȃ�A�����͎��s����Ȃ��B
������������������������������������
for���ɗ������A�p�������������ׂĎ��{������A����ƁAfor�����邱�Ƃ��ł���̂ł��傤���H�H�H�H
�����ɂȂ�܂������A���e�͊肢�܂��B
�ŁA
���[�p�X�̒��ӓ_������܂��B
10�ʂ�22�����ƁA��R���傫�����āA�d�������������x�������傫�����܂��B
�����́A���́A�V�T���ɂ��A���̕��A�R���f���T10�ʂ�2����ɂ��Ă��܂��B����ɂ���āA�R���f���T�e�ʂ�2�{�ɂȂ�B
TR 2019/06/27(Thu) 06:14 No.1727