僩僺僢僋娭楢婰帠
48帪娫埲撪偺婰帠偼  偱昞帵偝傟傑偡
偱昞帵偝傟傑偡
偱昞帵偝傟傑偡
懕侾侾乕俹倂俵
俿俼偝傫丆朰傟偰傑偟偨丅
僾儖傾僢僾偟偰傑偟偨偹丅
崱擔偼偱偒側偄偺偱偡偑丆
柧擔丆儌乕僞乕夞偟偰尒傑偡丅
仏仏仏仏捛婰仏仏仏仏
丂栆媿儘僢僋偝傫偍偍偭偟傖傞捠傝偱偟偨丅
丂偨偩丆捈偟偰偟傑偆偲丆偒偭偲丆儚儞僋儘僢僋懡偔側傝傑偡偐偹丅
僾儖傾僢僾偟偰傑偟偨偹丅
崱擔偼偱偒側偄偺偱偡偑丆
柧擔丆儌乕僞乕夞偟偰尒傑偡丅
仏仏仏仏捛婰仏仏仏仏
丂栆媿儘僢僋偝傫偍偍偭偟傖傞捠傝偱偟偨丅
丂偨偩丆捈偟偰偟傑偆偲丆偒偭偲丆儚儞僋儘僢僋懡偔側傝傑偡偐偹丅
 mabo
mabo  2019/06/16(Sun) 23:17 No.1683
2019/06/16(Sun) 23:17 No.1683
Re: 懕侾侾乕俹倂俵
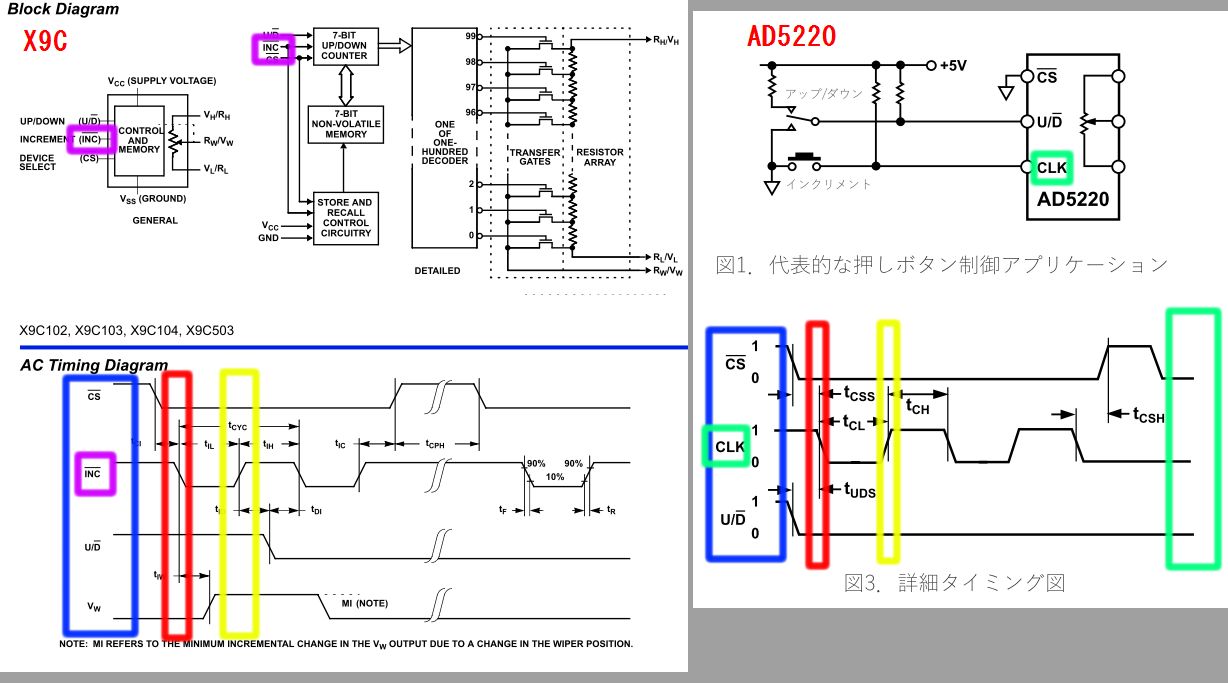 偊乕偲丄揧晅恾嵍偑X9C偺傕偺偱偡丅塃偑AD5220偱偡丅
偊乕偲丄揧晅恾嵍偑X9C偺傕偺偱偡丅塃偑AD5220偱偡丅傑偢丄X9C偱偡偗偳丄晛捠丄僾儘僌儔儉傪慻傓嵺偼僞僀儉僠儍乕僩乮偙偙偱偼AC TIMING DIAGRAM乯傪尒傑偡丅
惵慄傪尒傟偽傢偐傞傛偆偵丄INC僺儞偼僲乕儅儖乮憖嶌奜乯偱偼HIGH偵側偭偰偄傑偡丅
師偵CS傪LOW偵偟偰偄傑偡偗偳丄傑偀丄偙偺忬懺偑崱夞偺僲乕儅儖忬懺偵憡摉偟傑偡丅
偦偟偰丄愒慄晹偱丄伀偲側偭偰僗僩儘乕僽偱偡丅墿怓晹偱丄掕埵抲偺HIGH偵栠偟傑偡丅
偙偺傛偆偵傾僀僪儖HIGH偲偡傞傛偆偵彂偐傟偰偄傞偺偱丄偦偺傑傑僾儘僌儔儉偟偨偩偗偱偡丅
仸暿偵乽媡偱偼摦嶌偟側偄乿丄偲尵偭偰偄傞栿偱偼柍偄偱偡傛丅乽曐徹偝傟偰偄側偄乿偲偄偆帠偱偡丅
AD5220偵娭偟偰傕摨偠帠偱丄僞僀儈儞僌恾偱丄尦乆HIGH偵側偭偰偄傑偡丅
偨偩偟丄AD5220偺傎偆偼屻曽偺墿椢慄偺晹暘偱偼CLK僺儞偑LOW偱偡丅偙傟偼晛捠丄乽偳偪傜偱傕峔傢側偄乿偲
偄偆帠傪堄枴偟傑偡丅
偦偟偰丄傕偆堦偮丄僲乕儅儖HIGH傪姶偠偨偺偼偦偺忋偺庤摦偺夞楬恾偱偡丅
傒傟偽傢偐傞傛偆偵丄僾儖傾僢僾亖僲乕儅儖HIGH偱偡丅
傑偀丄偙偪傜偺僨僶僀僗傕巹偺僾儘僌儔儉偑晛捠偱偡丅亖僨乕僞僔乕僩偺傑傑偱偡丅
仸偦偺恾偱暘偐傞傛偆偵AD5220偺曽偼CS傪LOW屌掕偱巊偭偰栤戣柍偄敜偱偡丅
X9C傕偦傟偑尨場偱掞峈抣偑偍偐偟偄丄偲偼巚偭偰偄傑偣傫丅
偱丄側偤丄INC僺儞乮CLK僺儞乯偼暯忢帪偑HIGH偲尵偭偰偄傞偺偵丄LOW弌椡偱弶婜壔偡傞偺偱偟傚偆偐丠
掞峈抣偵偐傫偟偰偼X9C偑亇20亾丄AD5220偑亇30亾側偺偱丄乽8.5倠兌乿傗乽栺俋侽倠兌乿斖埻撪偱偡丅
儚僀僷乕掞峈偵娭偟偰偼偳偆峫偊偰傕偍偐偟偄悢抣偱偡丅
僨乕僞僔乕僩偱偼丄椉幰偲傕偵丄40兌乮max100兌乯偱偡丅幚嵺偺悢抣乮AD5220偺僌儔僼乯傪尒偰傕25乣60兌偱偡丅
> 偆傑偔尵偊側偄偗偳丄寁嶼偡傞晹栧偲丄壜曄掞峈晹暘丄
> 揹尮傪擖傟傞僐僣偼丄寁嶼晹栧偵嵟弶偵揹尮傪擖傟傞偲丄摦嶌偼栤戣側偐偭偨偲巚偄傑偡丅
> 揹尮ON偱丄堦弖丄戝偒側揹棳偑棳傟偰偟傑偄傑偟偨丅
> LED偱妋擣偟偰偄傑偟偨丅偙傟偼巇曽偑側偄偐側乣丅
偦偺曈傝偺姶妎偼廳梫偱偡丅偱傕乽巇曽偑側偄偐側乣乿偲尵偭偰偄偰偼懯栚偱偡傛丅
偪傖傫偲婲摦帪偺僔乕働儞僗傪峫偊傞傋偒偱偟傚偆丅
偨偩丄偦傟埲慜偵偙偺僨僶僀僗偑偙偺傑傑巊偊傞傕偺偐偳偆偐偺敾抐傪偡傞偺偑愭偩偲巚偭偰偄傑偡丅
巊偊側偄僨僶僀僗偺堊偵僔乕働儞僗傪峫偊偰傕巇曽偑柍偄偙偲偱偡偐傜丅
<捛婰偟傑偡亜
> 偨偩丆捈偟偰偟傑偆偲丆偒偭偲丆儚儞僋儘僢僋懡偔側傝傑偡偐偹丅
儚儞僋儘僢僋懡偔側傞偲傕尵偊傑偣傫丅
偮傑傝丄PIC偑LOW弌椡偱弶婜壔偝傟傞応崌偼丄偦偺帪偵僨僶僀僗偵僋儘僢僋偑擖傞偐偳偆偐偼枹抦悢偱偡丅
揹尮偑擖傞捈慜偵CLK僺儞偺揹埑偑HIGH偺斖埻傪渇渞偭偰偄偨傜僋儘僢僋偑擖傞壜擻惈偑崅偔側傝傑偡丅
傑偨丄偦偺帪偵儚僀僷乕偑偳偪傜偵摦偔偐傕枹抦悢偱偡丅
偱丄幚嵺偵摦偐偡柦椷傪擖傟偨嵺偵丄嵟弶偺1夞栚偼儚僀僷乕偼摦偒傑偣傫丅偍偍傛偦弶婜壔乮CLK僺儞傪HIGH乯偡傞摦偒偵側傝傑偡丅
仸僨僕僞儖億僥儞僔儑僨僶僀僗偺曽偑PIC傛傝傕憗偔婲摦偟偨応崌丄揹尮僲僀僘偵傛偭偰丄僼儘乕僥傿儞僌忬懺偺CLK僺儞傪壗搙傕
忋壓偝偣傞壜擻惈傕偁傝傑偡丅側偺偱丄TR偝傫偑峴偭偰偄偨僾儖傾僢僾掞峈傪偮偗傞丄偲偄偆偺傕埆偔偼柍偄採埬偱偡丅
偱傕丄婲摦帪娫傪懸偭偨偺偪偵丄儚僀僷乕埵抲偑嵟忋抜偵偁傞偲壖掕偟偰丄嵟壓抜傑偱偝偘偰偐傜丄埵抲傪0偵偡傟偽娫堘偄側偄偲巚偄傑偡丅
峏偵丄偦偺屻偵儚僀僷乕晹傪宷偖丄偲偄偆僔乕働儞僗傕昁梫側偺偐傕偟傟傑偣傫丅
 栆媿儘僢僋 2019/06/17(Mon) 00:18 No.1684
栆媿儘僢僋 2019/06/17(Mon) 00:18 No.1684
Re: 懕侾侾乕俹倂俵
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
暔偵偼壗偱傕巇妡偗偑偁傝傑偡傛偹丅
岺嶌幒攧揦偺愱栧壠偑尵偭偨尵梩傪傕偆堦搙嵞宖偟傑偡丅
岺嶌幒攧揦偺婰帠丂伀
乽掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡丅乿
http://iizukakuromaguro.sakura.ne.jp/216_digitalPOT/216_digitalPOT.html
忋婰暥復傪尒傞偲丄
幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
捛婰
壜曄掞峈婍偱偡偑5k偱偟偨丅
x9c傕5220傕奩摉側偟丅掹傔傑偡丅
暔偵偼壗偱傕巇妡偗偑偁傝傑偡傛偹丅
岺嶌幒攧揦偺愱栧壠偑尵偭偨尵梩傪傕偆堦搙嵞宖偟傑偡丅
岺嶌幒攧揦偺婰帠丂伀
乽掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡丅乿
http://iizukakuromaguro.sakura.ne.jp/216_digitalPOT/216_digitalPOT.html
忋婰暥復傪尒傞偲丄
幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
捛婰
壜曄掞峈婍偱偡偑5k偱偟偨丅
x9c傕5220傕奩摉側偟丅掹傔傑偡丅
TR 2019/06/17(Mon) 06:59 No.1685
Re: 懕侾侾乕俹倂俵
> TR偝傫
> 掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡
偙傟傑偱傕丄巹偼偦偆偄偭偨帠傪壗搙傕愢柧偟偰偒傑偟偨丅傁偭偲尒曉偟偰傕丄
No.1592
No.1602
No.1612
No.1644
No.1656
偁偨傝偼偦傟偵棈傓帠暱偱偡丅乮捈愙偼娭學側偄傕偺傕娷傫偱偄傑偡偗偳乯
偱丄杮棃乽婥偵側傜側偔側傞乿敜側偺偵丄偦偺傛偆偵摦偄偰偄側偄傛偆側偺偱丄杮摉偐偳偆偐丠乮偪傖傫偲摦偄偰偄傞偺偐乯傪
暘埑偑曵傟側偄傛偆偵乽壗傕晅偗偢偵乿丄乽揹埑乿傪應偭偰偔傟偲偄偆帠傕壗搙傕尵偭偨偲巚偄傑偡丅
> 忋婰暥復傪尒傞偲丄
> 幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偺巚偄崬傒偱夝庍偟側偄偱偔偩偝偄丅
偳偙偵傕偦傫側偙偲偼尵偭偰偄傑偣傫丅斞捤偝傫傕偦傫側偙偲傪尵傢傟偨傜崲偭偰偟傑偆偱偟傚偆丅
偦傟偼丄乽掞峈抣偑婔偮偱偁傟丄揹埑偼斾椺娭學偵側傞偐傜暘埑偱巊偆側傜偁傑傝娭學側偄乿丄偲偄偆帠偱偡丅
椺偊傟偽丄PIC偵儃儕儏乕儉傪偮偗偰丄ADC擖椡偱棙梡偟偨傝偟傑偡偗偳丄偦偺嵺偺儃儕儏乕儉偺掞峈抣偑堎側傞傕偺傪巊偭偰傕丄
乮摨偠摿惈偺傕偺側傜乯掞峈抣偼娭學側偄丄偲偄偆堄枴偱偡丅
> 帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
壗屘丄偦傟偑弌傞偺偱偟傚偆偐丠
乽暘埑偱巊梡偡傞側傜掞峈抣偼偁傑傝娭學側偄乿偲尵偭偰偄傞偺傪尒偰丄偦偺掞峈抣傪寁應偟偰傒傞丄偲偄偆峴摦偵宷偑傞偺偑傛偔敾傝傑偣傫丅
掞峈傪應傞帺懱偼埆偄帠偱偼柍偄偺偱峔偄傑偣傫偗偳丅
> 壜曄掞峈婍偱偡偑5k偱偟偨丅
> x9c傕5220傕奩摉側偟丅掹傔傑偡
偙偺寢榑傕傛偔敾傝傑偣傫丅忋弎偺傛偆偵丄暘埑棙梡側傜掞峈抣偼偁傑傝娭學偁傝傑偣傫丅
5k兌偱傕10k兌偱傕傎傏摨偠摦嶌偵側傝傑偡丅
掞峈婍亖壜曄揹棳偲偟偰棙梡偝傟偰偄傞偺側傜丄10k兌僨僶僀僗偱丄偦偺斖埻偱摦偐偣偽偄偄榖偱偡丅乮儚僀僷乕堏摦亖暘夝擻偼敿暘偵側傝傑偡偗偳乯
仸仸仸仸仸仸仸仸仸仸仸仸仸仸仸
巹傕丄偡偒岲傫偱斲掕揑側帠偽偐傝尵偭偰偄傞傢偗偱偼偁傝傑偣傫丅
栜榑丄巹偺偄偭偨帠偱丄TR偝傫偑婥暘傪奞偝傟傞偙偲傕丄懡乆偁偭偨偱偟傚偆丅
偦傟傪彸抦偱丄巜揈偡傞偺偼椙偄忬懺偱偼柍偄偲姶偠偰偄傑偡丅
側偺偱丄偟偽傜偔惷娤偝偣偰傕傜偆帠偵偟傑偡丅
> 掞峈抣傕偽傜偮偒偑偁傞丅俆倠兌偺暔傪峸擖偟偰傕係乣俇倠兌偵偽傜偮偔丅偙偺偽傜偮偒偼暘埑偺帪偵偼婥偵側傜側偔側傝傑偡
偙傟傑偱傕丄巹偼偦偆偄偭偨帠傪壗搙傕愢柧偟偰偒傑偟偨丅傁偭偲尒曉偟偰傕丄
No.1592
No.1602
No.1612
No.1644
No.1656
偁偨傝偼偦傟偵棈傓帠暱偱偡丅乮捈愙偼娭學側偄傕偺傕娷傫偱偄傑偡偗偳乯
偱丄杮棃乽婥偵側傜側偔側傞乿敜側偺偵丄偦偺傛偆偵摦偄偰偄側偄傛偆側偺偱丄杮摉偐偳偆偐丠乮偪傖傫偲摦偄偰偄傞偺偐乯傪
暘埑偑曵傟側偄傛偆偵乽壗傕晅偗偢偵乿丄乽揹埑乿傪應偭偰偔傟偲偄偆帠傕壗搙傕尵偭偨偲巚偄傑偡丅
> 忋婰暥復傪尒傞偲丄
> 幚尡偟側偄偲偄偗側偄傫偩偗偳丄暘埑偟偰巊偆側傜丄巊偄暔偵側傞傛偆偵撉傔傑偡丅
帺暘偺巚偄崬傒偱夝庍偟側偄偱偔偩偝偄丅
偳偙偵傕偦傫側偙偲偼尵偭偰偄傑偣傫丅斞捤偝傫傕偦傫側偙偲傪尵傢傟偨傜崲偭偰偟傑偆偱偟傚偆丅
偦傟偼丄乽掞峈抣偑婔偮偱偁傟丄揹埑偼斾椺娭學偵側傞偐傜暘埑偱巊偆側傜偁傑傝娭學側偄乿丄偲偄偆帠偱偡丅
椺偊傟偽丄PIC偵儃儕儏乕儉傪偮偗偰丄ADC擖椡偱棙梡偟偨傝偟傑偡偗偳丄偦偺嵺偺儃儕儏乕儉偺掞峈抣偑堎側傞傕偺傪巊偭偰傕丄
乮摨偠摿惈偺傕偺側傜乯掞峈抣偼娭學側偄丄偲偄偆堄枴偱偡丅
> 帺暘偼丄巚偄愗偭偰丄ML4偺壜曄掞峈傪奜偟偰丄掞峈傪寁應偟偰傒傑偡傛丅
壗屘丄偦傟偑弌傞偺偱偟傚偆偐丠
乽暘埑偱巊梡偡傞側傜掞峈抣偼偁傑傝娭學側偄乿偲尵偭偰偄傞偺傪尒偰丄偦偺掞峈抣傪寁應偟偰傒傞丄偲偄偆峴摦偵宷偑傞偺偑傛偔敾傝傑偣傫丅
掞峈傪應傞帺懱偼埆偄帠偱偼柍偄偺偱峔偄傑偣傫偗偳丅
> 壜曄掞峈婍偱偡偑5k偱偟偨丅
> x9c傕5220傕奩摉側偟丅掹傔傑偡
偙偺寢榑傕傛偔敾傝傑偣傫丅忋弎偺傛偆偵丄暘埑棙梡側傜掞峈抣偼偁傑傝娭學偁傝傑偣傫丅
5k兌偱傕10k兌偱傕傎傏摨偠摦嶌偵側傝傑偡丅
掞峈婍亖壜曄揹棳偲偟偰棙梡偝傟偰偄傞偺側傜丄10k兌僨僶僀僗偱丄偦偺斖埻偱摦偐偣偽偄偄榖偱偡丅乮儚僀僷乕堏摦亖暘夝擻偼敿暘偵側傝傑偡偗偳乯
仸仸仸仸仸仸仸仸仸仸仸仸仸仸仸
巹傕丄偡偒岲傫偱斲掕揑側帠偽偐傝尵偭偰偄傞傢偗偱偼偁傝傑偣傫丅
栜榑丄巹偺偄偭偨帠偱丄TR偝傫偑婥暘傪奞偝傟傞偙偲傕丄懡乆偁偭偨偱偟傚偆丅
偦傟傪彸抦偱丄巜揈偡傞偺偼椙偄忬懺偱偼柍偄偲姶偠偰偄傑偡丅
側偺偱丄偟偽傜偔惷娤偝偣偰傕傜偆帠偵偟傑偡丅
栆媿儘僢僋 2019/06/17(Mon) 13:04 No.1686
Re: 懕侾侾乕俹倂俵
僾儘僌儔儉傪嶌偭偰偄偨偩偒丄姶幱怽偟忋偘傑偡丅
帺暘偼丄偦偆巚偭偰偄傑偡丅
栆媿儘僢僋偝傫偼丄怓乆偲尵傢傟偰偄傑偡偑丄帺暘偼丄懡暘敿暘傕暘偐偭偰偄側偄偲巚偄傑偡丅
偦偆巚偭偰偔偩偝偄丅
傑偨丄宖帵斅偱偺傗傝庢傝偼丄憡庤懁偵丄帺暘偑巚偭偨捠傝偵揱傢傝偯傜偄偲傕巚偄傑偡丅
壜曄掞峈婍姺憰偺審偱偡偑丄偮偄偰偄偨傕偺偼5k側傫偱偡傛丄ML4偵偔偭偮偄偰偄傞忬懺偩偲1k偱偟偨丅
懡暘壗偐偺尨場偑偁傞偲巚偄傑偡丅
偦偙偱丄侾侽倠偺壜曄掞峈婍傪偮偗偨傜丄暰奞傗屘忈偵偮側偑傞偙偲偑婥偵側偭偨偺偱丄
傗傔傛偆偐偲峫偊傑偟偨丅
偦偆偄偭偨怱攝偑侾侽侽亾側偄側傜丄懕偗偰峴偙偆偐偲巚偄傑偡丅
偦傟偐傜丄x9們偼夡傟偰偄偰丄揹埑側偳偼寁應偱偒側忬懺偱棃偰偄傑偟偨傛丅
仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊丄
僨僕僞儖億僥儞僔儑儞偺曽偼丄愘偄帺暘偱偡偑丄堦弿偵恑傓婥帩偪偱偄傑偡丅
傑偨丄偱偒傞傕偺側傜丄帺暘傕棟夝偟偨偄偲巚偭偰偄傑偡偺偱丄堷偒懕偒傛傠偟偔偍婅偄偟傑偡丅
帺暘偼丄偦偆巚偭偰偄傑偡丅
栆媿儘僢僋偝傫偼丄怓乆偲尵傢傟偰偄傑偡偑丄帺暘偼丄懡暘敿暘傕暘偐偭偰偄側偄偲巚偄傑偡丅
偦偆巚偭偰偔偩偝偄丅
傑偨丄宖帵斅偱偺傗傝庢傝偼丄憡庤懁偵丄帺暘偑巚偭偨捠傝偵揱傢傝偯傜偄偲傕巚偄傑偡丅
壜曄掞峈婍姺憰偺審偱偡偑丄偮偄偰偄偨傕偺偼5k側傫偱偡傛丄ML4偵偔偭偮偄偰偄傞忬懺偩偲1k偱偟偨丅
懡暘壗偐偺尨場偑偁傞偲巚偄傑偡丅
偦偙偱丄侾侽倠偺壜曄掞峈婍傪偮偗偨傜丄暰奞傗屘忈偵偮側偑傞偙偲偑婥偵側偭偨偺偱丄
傗傔傛偆偐偲峫偊傑偟偨丅
偦偆偄偭偨怱攝偑侾侽侽亾側偄側傜丄懕偗偰峴偙偆偐偲巚偄傑偡丅
偦傟偐傜丄x9們偼夡傟偰偄偰丄揹埑側偳偼寁應偱偒側忬懺偱棃偰偄傑偟偨傛丅
仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊丄
僨僕僞儖億僥儞僔儑儞偺曽偼丄愘偄帺暘偱偡偑丄堦弿偵恑傓婥帩偪偱偄傑偡丅
傑偨丄偱偒傞傕偺側傜丄帺暘傕棟夝偟偨偄偲巚偭偰偄傑偡偺偱丄堷偒懕偒傛傠偟偔偍婅偄偟傑偡丅
TR 2019/06/17(Mon) 13:37 No.1687
Re: 懕侾侾乕俹倂俵
栆媿儘僢僋偝傫丆俿俼偝傫丆偙傫偽傫偼丅
栆媿儘僢僋偝傫丆侾俇俥俉俉偺審偼偛採埬偁傝偑偲偆偛偞偄傑偡丅
巹傕丆偦傠偦傠偐側丆側傫偰巚偄傑偡偑丆俫俹忋偵偼丆俉俉偺忣曬傑偩丆偁傞傛偆側偺偱丆偪傚偲峫偊傞傫偱偡偑丆
挭帪偱偡偹丅
戙懼偊偱偡偑丆惈擻傕偝傞偙偲側偑傜丆抣抜傕戝偒偄偱偡偹丅
偪側傒偵廐寧偱偼丆俉俉偼丆俀俈侽墌偱偟偨丅
抣抜峫偊傞偲丆堦斣埨偄丆侾俇F侾俉俀俈偁偨傝偐側側傫偰巚偄傑偡丅
俿俼偝傫丆崱斢丆俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆
俙俢俆俀俀侽偵抲偒姺偊偰丆儌乕僞乕夞偟偰傒傑偟偨丅
寢榑偐傜尵偆偲丆儌乕僞乕傪僐儞僩儘乕儖偡傞偙偲偼丆
壜擻偱偟偨丅
偨偩丆幚嵺巊偆偲側傞偲丆栆媿儘僢僋偝傫偑偍偭偟傖偭偨傛偆偵丆僔乕働儞僗傪偄傠偄傠峫偊傞傛偆偱偟傚偆偹丅
偄傠偄傠傗偭偰傒偰丆庤嫮偄姶偠偟偰傑偡丅
偍偐偟側摦嶌偑丆偄偔偮偐偁傝傑偟偨丅
堦斣抂偺億僕僔儑儞偐傜丆堦偮偢儚僀僷乕傪摦偐偟偰峴偒傑偟偨丅
杮棃側傜丆夞揮悢偼丆儚僀僷乕傪堦掕偺曽岦偵摦偐偡偵偮傟偰丆
忋偑傞摦嶌偺孹岦丆偁傞偄偼丆壓偑傞摦嶌偺孹岦傪懕偗傞偼偢偱偡偑丆
懠偺億僕僔儑儞偱偼丆夞揮悢偑壓偑傞偺偵丆偁傞摿掕偺億僕僔儑儞偱偼丆
夞揮悢偑忋偑傞丆師偺億僕僔儑儞偱偼丆傑偨壓偑傞丆偲偄偆尰徾偑傒傜傟傑偟偨丅
壗夞偐幚尡偟偰丆枅夞摨偠応強偱偍偒傑偡偺偱丆
僾儘僌儔儉偺栤戣傛傝偼僴乕僪偺摿惈偺傛偆側婥偑偟傑偡偑丆
僉乕敾掕偱妱傝崬傒巊偭偰傑偡偺偱丆妱傝崬傒偺塭嬁傕偁傞偺偐丆
偙偺曈偼偪傚偭偲傢偐傝傑偣傫丅
偙傟丆掞峈抣偺岆嵎偲摨偠偱丆儚僀僷乕偺摦嶌偵巊偭偰傞丆
俥俤俿丠僩儔儞僕僗僞丠僟僀僆乕僪丠偺摿惈偺堘偄側偺偐側偲
巚偄傑偟偨丅
偦傟偲丆幚嵺偵儌乕僞乕傪夞偡偲丆僲僀僘偑弌偰偔傞偺偐丆
俙俢俆俀俀侽偺揹尮傪擖傟偰偐傜丆儌乕僞乕偺揹尮偄傟傞偲丆
岆摦嶌偑懡偄姶偠偱偡丅
儌乕僞乕揹尮俷俶仺俙俢俆俀俀侽丂俷俶仺俹俬俠丂俷俶
偺弴斣偺曽偑偄偄傛偆偱偡丅
傕偆偪傚偭偲偄偠偭偰尒傑偡丅
栆媿儘僢僋偝傫丆侾俇俥俉俉偺審偼偛採埬偁傝偑偲偆偛偞偄傑偡丅
巹傕丆偦傠偦傠偐側丆側傫偰巚偄傑偡偑丆俫俹忋偵偼丆俉俉偺忣曬傑偩丆偁傞傛偆側偺偱丆偪傚偲峫偊傞傫偱偡偑丆
挭帪偱偡偹丅
戙懼偊偱偡偑丆惈擻傕偝傞偙偲側偑傜丆抣抜傕戝偒偄偱偡偹丅
偪側傒偵廐寧偱偼丆俉俉偼丆俀俈侽墌偱偟偨丅
抣抜峫偊傞偲丆堦斣埨偄丆侾俇F侾俉俀俈偁偨傝偐側側傫偰巚偄傑偡丅
俿俼偝傫丆崱斢丆俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆
俙俢俆俀俀侽偵抲偒姺偊偰丆儌乕僞乕夞偟偰傒傑偟偨丅
寢榑偐傜尵偆偲丆儌乕僞乕傪僐儞僩儘乕儖偡傞偙偲偼丆
壜擻偱偟偨丅
偨偩丆幚嵺巊偆偲側傞偲丆栆媿儘僢僋偝傫偑偍偭偟傖偭偨傛偆偵丆僔乕働儞僗傪偄傠偄傠峫偊傞傛偆偱偟傚偆偹丅
偄傠偄傠傗偭偰傒偰丆庤嫮偄姶偠偟偰傑偡丅
偍偐偟側摦嶌偑丆偄偔偮偐偁傝傑偟偨丅
堦斣抂偺億僕僔儑儞偐傜丆堦偮偢儚僀僷乕傪摦偐偟偰峴偒傑偟偨丅
杮棃側傜丆夞揮悢偼丆儚僀僷乕傪堦掕偺曽岦偵摦偐偡偵偮傟偰丆
忋偑傞摦嶌偺孹岦丆偁傞偄偼丆壓偑傞摦嶌偺孹岦傪懕偗傞偼偢偱偡偑丆
懠偺億僕僔儑儞偱偼丆夞揮悢偑壓偑傞偺偵丆偁傞摿掕偺億僕僔儑儞偱偼丆
夞揮悢偑忋偑傞丆師偺億僕僔儑儞偱偼丆傑偨壓偑傞丆偲偄偆尰徾偑傒傜傟傑偟偨丅
壗夞偐幚尡偟偰丆枅夞摨偠応強偱偍偒傑偡偺偱丆
僾儘僌儔儉偺栤戣傛傝偼僴乕僪偺摿惈偺傛偆側婥偑偟傑偡偑丆
僉乕敾掕偱妱傝崬傒巊偭偰傑偡偺偱丆妱傝崬傒偺塭嬁傕偁傞偺偐丆
偙偺曈偼偪傚偭偲傢偐傝傑偣傫丅
偙傟丆掞峈抣偺岆嵎偲摨偠偱丆儚僀僷乕偺摦嶌偵巊偭偰傞丆
俥俤俿丠僩儔儞僕僗僞丠僟僀僆乕僪丠偺摿惈偺堘偄側偺偐側偲
巚偄傑偟偨丅
偦傟偲丆幚嵺偵儌乕僞乕傪夞偡偲丆僲僀僘偑弌偰偔傞偺偐丆
俙俢俆俀俀侽偺揹尮傪擖傟偰偐傜丆儌乕僞乕偺揹尮偄傟傞偲丆
岆摦嶌偑懡偄姶偠偱偡丅
儌乕僞乕揹尮俷俶仺俙俢俆俀俀侽丂俷俶仺俹俬俠丂俷俶
偺弴斣偺曽偑偄偄傛偆偱偡丅
傕偆偪傚偭偲偄偠偭偰尒傑偡丅
mabo 2019/06/18(Tue) 00:08 No.1688
Re: 懕侾侾乕俹倂俵
 mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅亜俿俼偝傫丆崱斢丆俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆
俙俢俆俀俀侽偵抲偒姺偊偰丆儌乕僞乕夞偟偰傒傑偟偨丅
寢榑偐傜尵偆偲丆儌乕僞乕傪僐儞僩儘乕儖偡傞偙偲偼丆
壜擻偱偟偨丅
偨偩丆幚嵺巊偆偲側傞偲丆栆媿儘僢僋偝傫偑偍偭偟傖偭偨傛偆偵丆僔乕働儞僗傪偄傠偄傠峫偊傞傛偆偱偟傚偆偹丅
偄傠偄傠傗偭偰傒偰丆庤嫮偄姶偠偟偰傑偡丅
乑僔乕働儞僗偲偄偆扨岅偱偡偑丄惂屼偡傞弴斣偱偟傚偆偐丄偦偆側傜丄昁梫偲帺暘傕幚尡帪偵巚偄傑偟偨丅
亜偍偐偟側摦嶌偑丆偄偔偮偐偁傝傑偟偨丅
堦斣抂偺億僕僔儑儞偐傜丆堦偮偢儚僀僷乕傪摦偐偟偰峴偒傑偟偨丅
杮棃側傜丆夞揮悢偼丆儚僀僷乕傪堦掕偺曽岦偵摦偐偡偵偮傟偰丆
忋偑傞摦嶌偺孹岦丆偁傞偄偼丆壓偑傞摦嶌偺孹岦傪懕偗傞偼偢偱偡偑丆
懠偺億僕僔儑儞偱偼丆夞揮悢偑壓偑傞偺偵丆偁傞摿掕偺億僕僔儑儞偱偼丆
夞揮悢偑忋偑傞丆師偺億僕僔儑儞偱偼丆傑偨壓偑傞丆偲偄偆尰徾偑傒傜傟傑偟偨丅
壗夞偐幚尡偟偰丆枅夞摨偠応強偱偍偒傑偡偺偱丆
乑帺暘偺x9c偼偦偆偄偭偨帠偼偁傝傑偣傫偱偟偨丅
亜僾儘僌儔儉偺栤戣傛傝偼僴乕僪偺摿惈偺傛偆側婥偑偟傑偡偑丆
僉乕敾掕偱妱傝崬傒巊偭偰傑偡偺偱丆妱傝崬傒偺塭嬁傕偁傞偺偐丆
偙偺曈偼偪傚偭偲傢偐傝傑偣傫丅
乑僉乕敾掕偭偰壗偱偡偐丠
亜偙傟丆掞峈抣偺岆嵎偲摨偠偱丆儚僀僷乕偺摦嶌偵巊偭偰傞丆
俥俤俿丠僩儔儞僕僗僞丠僟僀僆乕僪丠偺摿惈偺堘偄側偺偐側偲
巚偄傑偟偨丅
偦傟偲丆幚嵺偵儌乕僞乕傪夞偡偲丆僲僀僘偑弌偰偔傞偺偐丆
俙俢俆俀俀侽偺揹尮傪擖傟偰偐傜丆儌乕僞乕偺揹尮偄傟傞偲丆
岆摦嶌偑懡偄姶偠偱偡丅
儌乕僞乕揹尮俷俶仺俙俢俆俀俀侽丂俷俶仺俹俬俠丂俷俶
偺弴斣偺曽偑偄偄傛偆偱偡丅
乑
帺暘偑幚尡帪偵巚偭偰偄偨弴斣偲恀媡偱偡丅
棟桼
倶俋們慡懱傪ON偵偡傞偲丄堦弖丄儌僯僞乕梡LED偑敪岝偟偨丅
LED偺敪岝嬶崌偩偗傪尒傞偲摦嶌偼埨掕偟偰偄傑偟偨丅
偄傠傫側傕偺偑偁傞偺偱丄晄嬶崌屄強傪尒偮偗傞偺偼戝曄偱偡傛偹丅
帺暘偺帪偼丄
埲壓偺扨弮側幚尡曽朄偱偟偨丅偦偺帪偼丄揹埑抣乮侾侽係倣V乣4.5V)丄
掞峈抣乮210兌乣8.5倠兌乯乯丅
摦嶌偼僗儉乕僗偱偟偨丅偨偩偟丄倶俋們偼丄揹尮晹傪ON偵偟丄師偵壜曄掞峈晹暘偵揹尮傪擖傟傑偟偨丅
No1584偱丄堦搙揹埑抣傪曬崘乮157倣V~4.5V乯偟傑偟偨偑丄儊儌傪尒傞偲104倣V~4.5V
偱偟偨丅
幚尡曽朄
VR乣PIC乣倶俋們乣LED
應掕売強偼丄幨恀傪嶲徠偟偰偔偩偝偄丅
仏
嵟屻偵堦揰妋擣偝偣偰偔偩偝偄丅
5220偺僾儘僌儔儉偼丄No1671傪偦偺傑傑巊偭偰偄傑偡偐丠
偦傟偲丄帺暘偺幚尡曽朄偱偼婥偵側傞摦嶌偼側偐偭偨偺偱偟傚偆偐丠
仏5220偺愨懳掕奿傪尒傞偲丄乽Bx~Wx丂僾儔僗儅僀僫僗20倣A乿偲側偭偰偄傞偺偱丄
5220側傜丄敪岝LED乮栺侾侽mA偵梷偊偰乯傪巊偭偰傕夡傟側偄偲巚偄傑偡丅
崱屻偵偮偄偰
丒捛壛偺倶俋們偑棃偨傜傕偆堦搙僥僗僩傪偟傑偡丅
丒帺暘偼丄僨僕僞儖億僥儞僔儑儞傪傗傔傞偮傕傝偱偡丅
婛懚壜曄掞峈偼丄搶嫗僐僗儌僗惢偱5倠偑巊傢傟偰偄傑偟偨丅
ML4偵偮偄忬懺偱偼丄掞峈抣偼侾倠偱偟偨丅
掞峈抣偵嵎偑偁傞偺偼丄壗偐偺棟桼偑偁傞偲巚偄傑偡丅
x9c傕5220傕俆倠偼側偄傫偱偡丅岎姺傪偟偰丄暰奞傗屘忈偑晐偔側傝傑偟偨丅
偱丄側傫偱偡偑丄
mabo偝傫偑尵偭偰偄偨尵梩傪巚偄弌偟傑偟偨丅
堘偆曽朄偱壜曄掞峈偲摨條側摦嶌傪偡傞曽朄傕峫偊偰偄傞偲丅
嶲峫URL側偳偁傝傑偟偨傜丄曽朄傪娷傔偰嫵偊偰壓偝偄丅
丂No1633偵偦傟傜偟偒幨恀偑尒偊傑偡両両両
TR 2019/06/18(Tue) 05:57 No.1689
Re: 懕侾侾乕俹倂俵
俿俼偝傫丆栆媿儘僢僋偝傫偍偼傛偆偛偞偄傑偡丅
俿俼偝傫丆僾儘僌儔儉偱偡偑丆栆媿儘僢僋偝傫傗俿俼偝傫偍巊偄偺堦晹暘傪巊偭偰傑偡丅
摦嶌傪妋擣偟偨偐偭偨偺偱丆僞僋僩僗僀僢僠傪巊偭偰丆儚僀僷乕傪up丆down丆偡傞僾儘僌儔儉傪嶌傝傑偟偨丅
崱擔傕偄傠偄傠摦偐偟傑偟偨偑丆崱擔偼丆
儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
偑傎傏侾侽侽亾嬤偔僐儞僩儘乕儖偱偒傑偟偨丅
堦昩埲撪偲偄偆偺偼丆PIC偱AD俆俀俀侽偺弶婜壔侾昩掱搙傑偭偰偄傑偡丅
偦傟偲丆僋儘僢僋偺敪惗偱丆侽仺侾傪懕偗偰峴偆偺偱丆
擮偺偨傔丂LATABits.RA0丂偲偐偄偆昞婰傪巊偄傑偟偨丅
師偺儁乕僕偵摢偵偁偭偨峔憐偺奊宖嵹偟傑偡丅
巹偺摢偵偁偭偨傕偺偱丆HP偼偁傞偐偳偆偐晄柧偱偡丅
偦傟偲丆俿俼偝傫偺幚尡曽朄偱偡偑丆偁傟偙傟偄偊傞傎偳抦幆側偄偺偱偡偑丆
婥偵側傞偺偼丆俽俤俠偝傫偺婎斦偍巊偄偺偙偲偱偡丅
埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡偺曽偑偄偄偐偲巚偄傑偟偨丅
崱夞偺儐乕僠儏乕僽偺摦夋偼丆俽俤俠偝傫偺婎斦傗俽俽偲偼愙懕偟偰偄傑偣傫丅
俿俼偝傫丆僾儘僌儔儉偱偡偑丆栆媿儘僢僋偝傫傗俿俼偝傫偍巊偄偺堦晹暘傪巊偭偰傑偡丅
摦嶌傪妋擣偟偨偐偭偨偺偱丆僞僋僩僗僀僢僠傪巊偭偰丆儚僀僷乕傪up丆down丆偡傞僾儘僌儔儉傪嶌傝傑偟偨丅
崱擔傕偄傠偄傠摦偐偟傑偟偨偑丆崱擔偼丆
儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
偑傎傏侾侽侽亾嬤偔僐儞僩儘乕儖偱偒傑偟偨丅
堦昩埲撪偲偄偆偺偼丆PIC偱AD俆俀俀侽偺弶婜壔侾昩掱搙傑偭偰偄傑偡丅
偦傟偲丆僋儘僢僋偺敪惗偱丆侽仺侾傪懕偗偰峴偆偺偱丆
擮偺偨傔丂LATABits.RA0丂偲偐偄偆昞婰傪巊偄傑偟偨丅
師偺儁乕僕偵摢偵偁偭偨峔憐偺奊宖嵹偟傑偡丅
巹偺摢偵偁偭偨傕偺偱丆HP偼偁傞偐偳偆偐晄柧偱偡丅
偦傟偲丆俿俼偝傫偺幚尡曽朄偱偡偑丆偁傟偙傟偄偊傞傎偳抦幆側偄偺偱偡偑丆
婥偵側傞偺偼丆俽俤俠偝傫偺婎斦偍巊偄偺偙偲偱偡丅
埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡偺曽偑偄偄偐偲巚偄傑偟偨丅
崱夞偺儐乕僠儏乕僽偺摦夋偼丆俽俤俠偝傫偺婎斦傗俽俽偲偼愙懕偟偰偄傑偣傫丅
mabo 2019/06/18(Tue) 11:17 No.1690
Re: 懕侾侾乕俹倂俵
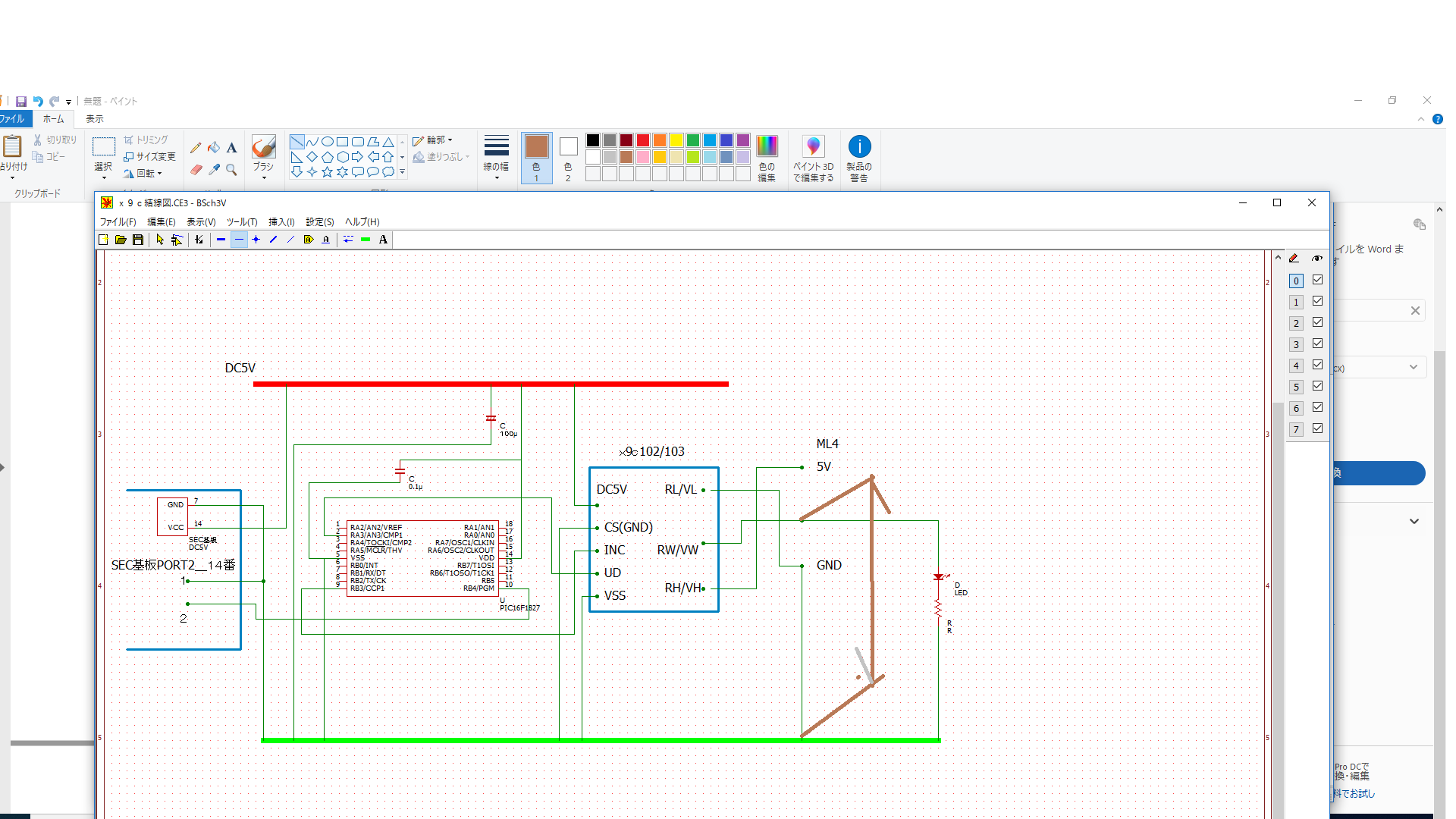
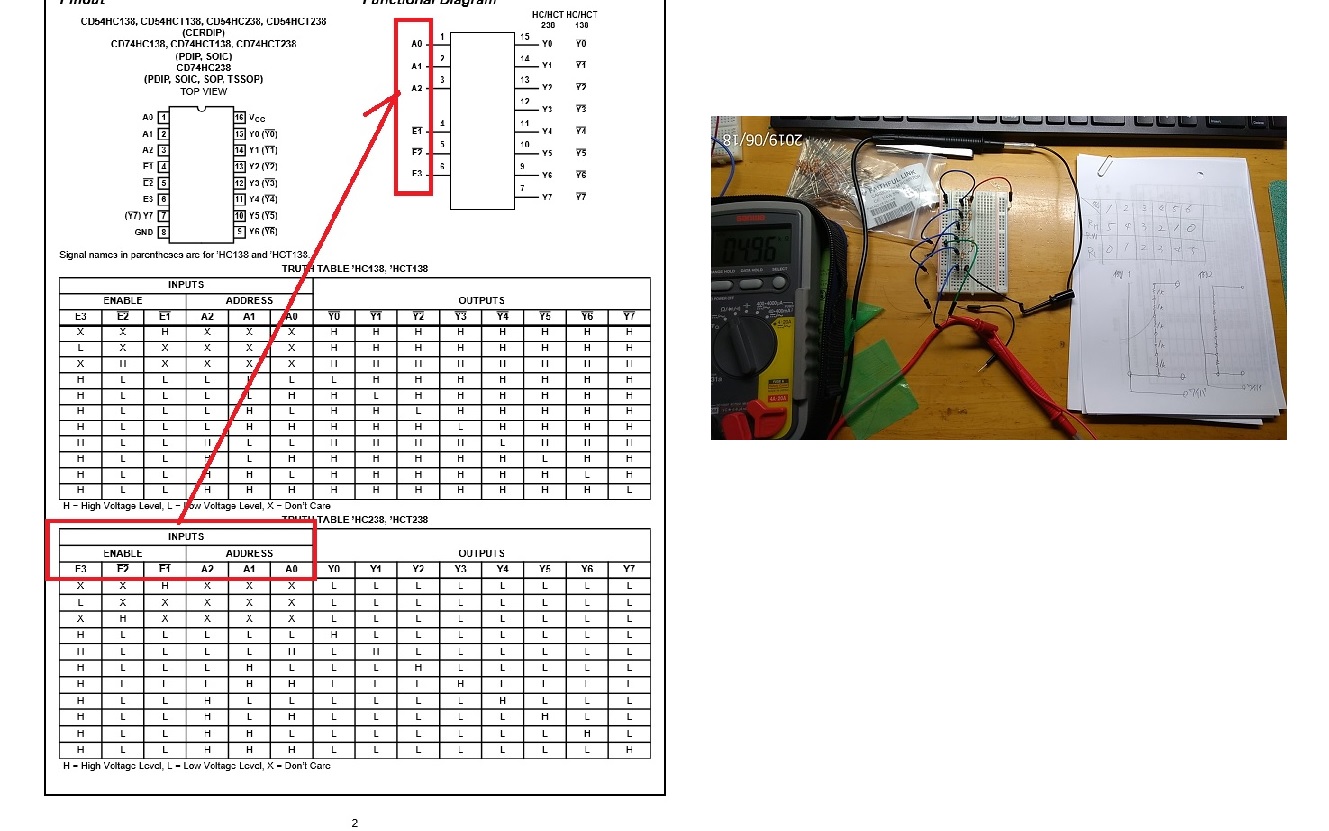
 俿俼偝傫丆摢偵偁偭偨峔憐偺攝慄恾偱偡丅
俿俼偝傫丆摢偵偁偭偨峔憐偺攝慄恾偱偡丅X9C 傗丂俙俢俆俀俀侽傪丂僷僋偭偨偩偗偱偡丅
偙偺僨僐乕僟俬俠乮廐寧乯傪巊偆偲俁杮偺慄偱丆俉屄偺僩儔儞僕僗僞乕摍偺僐儞僩儘乕儖偑偱偒傞傛偆偱偡丅
暋悢屄偮偐偭偰丆僐儞僩儘乕儖偡傞偵偼丆係杮偺慄偑昁梫偵
側傝傑偡偑丆
侾俉僺儞偐俀侽僺儞偺俹俬俠傪巊偆偲丆俁屄偺僨僐乕僟僐儞僩儘乕儖偱偒傑偡偺偱丆
俀係屄偺掞峈傪憖嶌偱偒偦偆偱偡丅
偨偩丆巊偆暔偺揹婥揑側摿惈摍偵偮偄偰丆抦幆偑丆偐側傝彮側偄忬懺偱偡偺偱丆
幚尡偱偺僩儔僀傾儞僪僄儔乕偵側傞偐側偁丆偲巚偄傑偡丅
仏仏仏捛婰偱偡丅仏仏仏仏
傛偔暘偐傜側偄偺偱偡偑丆屄恖揑偵偼丆俆倠兌偺偲偙傠偵丆
侾侽倠兌偺掞峈巊偭偰傕戝偒側婋尟偼側偄傛偆側婥偑偟偰傑偡丅
偙偺媡偩偲丆偪傚偭偲晐偄姶偠偱偡丅
mabo 2019/06/18(Tue) 11:31 No.1691
Re: 懕侾侾乕俹倂俵
mabo偝傫丄偙傫偵偪偼丅
僾儘僌儔儉傪曄峏偝傟偨偲偄偆偙偲偱偡偑丄戝暘恑傫偱偄傞傛偆偩偟丄儌乕僞乕偑夞偭偰椙偐偭偨偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
pic偲5220偺揹尮偼丄摨偠偲巚偄傑偡偑丄pic偑ON偟偰丄1昩埲撪偵丄5220偑ON偝偣傞曽朄丠
僾儘僌儔儉曄峏偵
昁梫側帪娫傪彂偄偨偺偐側丠
偳偺傛偆偵偟傑偟偨偐丠
僾儘僌儔儉傪嫵偊偰壓偝偄丅
壗張偱LATA偱偡偑丄妋偐丄ink傗ud偵學傞僾儘僌儔儉偱傢丄摉弶偐傜巊偭偰偄傑偟偨傛丅
>僨僐乕僟俬俠乮廐寧乯
忣曬桳傝擄偆偛偞偄傑偡丅
儕儗乕偺戙傢傝偱偡偹丅儕儗乕傛傝埨偔偰椙偝偦偆丅
偲偙傠偱丄
壜曄掞峈偺暘埑偲偟偰偺婡擻偼偳偆偡傞偺偩傠丠
椺偊偽丄嵟忋抜偺僩儔儞僕僗僞傪ON偺帪
A~儚僀僷乕偺掞峈偼0丄儚僀僷乕~B偼丄偦偺娫偺崌惉掞峈抣偲側傞丅
VR偺応崌丄A~儚僀僷乕娫偵掞峈抣偑偁傞偲巚偄傑偡丅
偦偺堘偄偼偳偆偟偨傜傛偄偐丠
暘偐傝傑偣傫偐丅
幚偼丄偪傚偭偲慜偐傜丄峫偊偰偄傑偟偨偑丄暘偐傝傑偣傫偱偟偨
>埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡
崱傡丄嵞屬梡偺寖埨僒儔儕乕側偺偱丄埨慡戞堦偱丄恑傔傑偡丅
傾僪僶僀僗丄桳傝擄偆偛偞偄傑偡丅
偦偆偩
5220偼暘埑偟偰巊偭偰偄傞偺偱偡偐丠
儚僀僷乕偺愭偵FET偺僎乕僩偲偮側偑偭偰偄傞偺偐丠
僾儘僌儔儉傪曄峏偝傟偨偲偄偆偙偲偱偡偑丄戝暘恑傫偱偄傞傛偆偩偟丄儌乕僞乕偑夞偭偰椙偐偭偨偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
pic偲5220偺揹尮偼丄摨偠偲巚偄傑偡偑丄pic偑ON偟偰丄1昩埲撪偵丄5220偑ON偝偣傞曽朄丠
僾儘僌儔儉曄峏偵
昁梫側帪娫傪彂偄偨偺偐側丠
偳偺傛偆偵偟傑偟偨偐丠
僾儘僌儔儉傪嫵偊偰壓偝偄丅
壗張偱LATA偱偡偑丄妋偐丄ink傗ud偵學傞僾儘僌儔儉偱傢丄摉弶偐傜巊偭偰偄傑偟偨傛丅
>僨僐乕僟俬俠乮廐寧乯
忣曬桳傝擄偆偛偞偄傑偡丅
儕儗乕偺戙傢傝偱偡偹丅儕儗乕傛傝埨偔偰椙偝偦偆丅
偲偙傠偱丄
壜曄掞峈偺暘埑偲偟偰偺婡擻偼偳偆偡傞偺偩傠丠
椺偊偽丄嵟忋抜偺僩儔儞僕僗僞傪ON偺帪
A~儚僀僷乕偺掞峈偼0丄儚僀僷乕~B偼丄偦偺娫偺崌惉掞峈抣偲側傞丅
VR偺応崌丄A~儚僀僷乕娫偵掞峈抣偑偁傞偲巚偄傑偡丅
偦偺堘偄偼偳偆偟偨傜傛偄偐丠
暘偐傝傑偣傫偐丅
幚偼丄偪傚偭偲慜偐傜丄峫偊偰偄傑偟偨偑丄暘偐傝傑偣傫偱偟偨
>埨掕偟偨摦嶌摍偵側傞傑偱偼丆攋懝偟偰傕偄偄娐嫬偱偺幚尡
崱傡丄嵞屬梡偺寖埨僒儔儕乕側偺偱丄埨慡戞堦偱丄恑傔傑偡丅
傾僪僶僀僗丄桳傝擄偆偛偞偄傑偡丅
偦偆偩
5220偼暘埑偟偰巊偭偰偄傞偺偱偡偐丠
儚僀僷乕偺愭偵FET偺僎乕僩偲偮側偑偭偰偄傞偺偐丠
TR 2019/06/18(Tue) 13:44 No.1692
Re: 懕侾侾乕俹倂俵
 俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偵偪偼丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偵偪偼丅慜宖偺奊娫堘偄偁傝傑偟偨偺偱丆嵞宖偟傑偡丅
嵶偐偄偙偲偼丆傗偭偰傒側偄偲暘偐傜側偄偐側偁丅
僾儘僌儔儉偱偡偑丆僉乕敾掕偵丂up丂down丂偺晹暘棈傑偣偨
偩偗偱偡丅
ADC摍偼徣偒傑偟偨丅
偦傟偲丆UP.DOWN丂偺僒僽娭悢丆侽乣侾俀俉丂偙偊偰傕丆
摦嶌偱偒傞傛偆偵偟偰傑偡丅
偁傑傝偁傑傝朖傔偨暔偱偼偁傝傑偣傫偑丆壓婰偑偦傟偱偡丅
俉俉攋懝偝偣偰偟傑偨偺偱丆庤帩偪偺侾俉俀俈偱偡丅
仏仏仏捛婰仏仏仏
僽儗僢僪儃乕僪偱偺嶌惉側偺偱丆PIC丂AD5220丂PWM僐儞僩儘乕儔乕丆慡晹丆暿揹尮偵偟偰傑偡丅
//***************************************
// PIC16F1827 Configuration Bit Settings
//
// 'C' source line config statements
//
// 2019-6-15 dejitaru_UP_DW
//
//LCD僺儞傾僒僀儞
// LCD_RS RA7
// LCD_EN RA6
// LCD_D4 RB7
// LCD_D5 RB6
// LCD_D6 RB5
// LCD_D7 RB4
//
//input 僉乕
//TEN_UP RB2
//TEN_DW RA4
//ONE_UP RB1
//ONE_DW
//
// CONFIG1
#pragma config FOSC = INTOSC // Oscillator Selection (INTOSC oscillator: I/O function on CLKIN pin)
#pragma config WDTE = OFF // Watchdog Timer Enable (WDT disabled)
#pragma config PWRTE = ON // Power-up Timer Enable (PWRT disabled)
#pragma config MCLRE = OFF // MCLR Pin Function Select (MCLR/VPP pin function is digital input)
#pragma config CP = OFF // Flash Program Memory Code Protection (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Memory Code Protection (Data memory code protection is disabled)
#pragma config BOREN = OFF // Brown-out Reset Enable (Brown-out Reset disabled)
#pragma config CLKOUTEN = OFF // Clock Out Enable (CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin)
#pragma config IESO = ON // Internal/External Switchover (Internal/External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable (Fail-Safe Clock Monitor is enabled)
// CONFIG2
#pragma config WRT = OFF // Flash Memory Self-Write Protection (Write protection off)
#pragma config PLLEN = OFF // PLL Enable (4x PLL disabled)
#pragma config STVREN = ON // Stack Overflow/Underflow Reset Enable (Stack Overflow or Underflow will cause a Reset)
#pragma config BORV = HI // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (Vbor), low trip point selected.)
#pragma config LVP = OFF // Low-Voltage Programming Enable (Low-voltage programming enabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
#include <stdlib.h>
#include "skSD1602LCD.h"
#define _XTAL_FREQ 8000000
#define TEN_UP RB2
#define ONE_UP RB1
#define TEN_DW RA4
#define ONE_DW RA3
#define CLK LATAbits.LATA1//AD5220僐儞僩儘乕儖
#define U_D LATAbits.LATA2//AD5220 傾僢僾僟僂儞
#define FALSE 0
#define TRUE 1
//曄悢愰尵
int count;
int WP_POSITION;
long pwmOnTimeCounter;
long pwmPeriodCounter;
long CONTROL_MODE_EXTERNAL_PWM_LOW;
unsigned int dutyCycle;
unsigned int lcd_dutyCycle;
unsigned char bGotPwmPulse;
volatile char str[7];
volatile int TEN_KEY_UP;
volatile int TEN_KEY_DW;
volatile int ONE_KEY_UP;
volatile int ONE_KEY_DW;
volatile int TEN_KEY_UP_COUNT;
volatile int TEN_KEY_DW_COUNT;
volatile int ONE_KEY_UP_COUNT;
volatile int ONE_KEY_DW_COUNT;
int WP_POSITION=64;
//娭悢愰尵
void main(void);
static void interrupt warikomi(void) ;
void lcd_hyouji(void);
void wp_TEN_UP(void);
void wp_TEN_DW(void);
void wp_ONE_UP(void);
void wp_ONE_DW(void);
void syokika(void);
/*******************************************************************************
* 儊僀儞偺張棟 *
*******************************************************************************/
void main(void)
{
int i ;
char s[17] ;
char mes[6]= {0xbd,0xc0,0xb0,0xc4,0x00} ; // "僗僞乕僩"暥帤偺僇僞僇僫僨乕僞
//static unsigned char buff[12];
OSCCON = 0b01110010 ; // 撪晹僋儘僢僋偼俉俵俫倸偲偡傞
__delay_ms(500);
__delay_ms(500);
ANSELA = 0b00000000 ; // 慡偰僨僕僞儖I/O偲偡傞
ANSELB = 0b00000000 ; // 慡偰僨僕僞儖I/O偲偡傞
TRISA = 0b00111000 ; // 僺儞(RA)偼弌椡偵妱摉偰傞(RA5.4.3偼擖椡)
TRISB = 0b00000110 ; // RB1.2偼丂擖椡丂懠偼慡偰偼弌椡
PORTA = 0b00111110 ; // RA弌椡僺儞偺弶婜壔
PORTB = 0b00000110 ; // RB弌椡僺儞偺弶婜壔
TEN_KEY_UP=FALSE;
TEN_KEY_DW=FALSE;
ONE_KEY_UP=FALSE;
ONE_KEY_UP=FALSE;
TMR0=157;
TMR0IF=0;
OPTION_REG=0b000000101;//2019-5-29曄峏
TMR0IE = 1;//僞僀儅乕0妱傝崬傒敪惗嫋壜
GIE= 1;//妱傝崬傒慡懱偺嫋壜
__delay_ms(500);
__delay_ms(500);
lcd_init( ) ;//LCD弶婜壔張棟
syokika( );//5220弶婜壔張棟wp傪A抂巕懁偵
i = 0 ;
while(1) {
lcd_setCursor(0,0) ;
lcd_puts("wp-POSITION:");
lcd_setCursor(0,1) ;
lcd_puts("ohom:");
lcd_hyouji( );
__delay_ms(500) ; // 侾昩屻偵孞傝曉偡
if(TEN_KEY_UP==TRUE && TEN_UP==1){
wp_TEN_UP( );
lcd_hyouji( );
TEN_KEY_UP=FALSE;
}
if(ONE_KEY_UP==TRUE && ONE_UP==1){
wp_ONE_UP( );
lcd_hyouji( );
ONE_KEY_UP=FALSE;
}
if(TEN_KEY_DW==TRUE && TEN_DW==1){
wp_TEN_DW( );
lcd_hyouji( );
TEN_KEY_DW=FALSE;
}
if(ONE_KEY_DW==TRUE && ONE_DW==1){
wp_ONE_DW( );
lcd_hyouji( );
ONE_KEY_DW=FALSE;
}
}
}
static void interrupt warikomi(void) {//妱傝崬傒張棟
//***********TIMER0妱傝崬傒張棟****************
if(TMR0IF==1){
TMR0=157;
if(TEN_UP==0){TEN_KEY_UP_COUNT++;}
else{ TEN_KEY_UP_COUNT = 0;}
if(TEN_KEY_UP_COUNT>=10){TEN_KEY_UP_COUNT=9;}
if(TEN_KEY_UP_COUNT==8){TEN_KEY_UP=TRUE;}
if(TEN_DW==0){TEN_KEY_DW_COUNT++;}
else{ TEN_KEY_DW_COUNT = 0;}
if(TEN_KEY_DW_COUNT>=10){TEN_KEY_DW_COUNT=9;}
if(TEN_KEY_DW_COUNT==8){TEN_KEY_DW=TRUE;}
if(ONE_UP==0){ONE_KEY_UP_COUNT++;}
else{ ONE_KEY_UP_COUNT = 0;}
if(ONE_KEY_UP_COUNT>=10){ONE_KEY_UP_COUNT=9;}
if(ONE_KEY_UP_COUNT==8){ONE_KEY_UP=TRUE;}
if(ONE_DW==0){ONE_KEY_DW_COUNT++;}
else{ ONE_KEY_DW_COUNT = 0;}
if(ONE_KEY_DW_COUNT>=10){ONE_KEY_DW_COUNT=9;}
if(ONE_KEY_DW_COUNT==8){ONE_KEY_DW=TRUE;}
TMR0IF = 0;
}
}
void lcd_hyouji(void){
unsigned char buff[12];
itoa((char *)buff, WP_POSITION,10) ;
lcd_setCursor(13, 0);
lcd_puts(" ");
lcd_setCursor(13, 0);
lcd_puts(buff);
itoa((char *)buff, WP_POSITION*0.78,10) ;
lcd_setCursor(13, 1);
lcd_puts(" ");
lcd_setCursor(13, 1);
lcd_puts(buff);
}
void syokika(void){
int i;
for(i=0;i<66;i++){
wp_ONE_DW( );
__delay_ms(2);
}
}
void wp_TEN_UP(void){
int i;
for(i=0;i<10;i++){
wp_ONE_UP( );
}
}
void wp_TEN_DW(void){
int i;
for(i=0;i<10;i++){
wp_ONE_DW( );
}
}
void wp_ONE_UP(void){
if( WP_POSITION<=128){ WP_POSITION++;}
else{ WP_POSITION=129;}
U_D = 1;
//asm("nop");
CLK = 0;
// asm("nop");
CLK = 1;
}
void wp_ONE_DW(void){
if( WP_POSITION>0){ WP_POSITION--;}
else{ WP_POSITION=0;};
//WP_POSITION--;
U_D = 0;
//asm("nop");
CLK = 0;
//asm("nop");
CLK = 1;
}
mabo 2019/06/18(Tue) 14:35 No.1693
Re: 懕侾侾乕俹倂俵
 mabo偝傫偙傫偽傫偼丄
mabo偝傫偙傫偽傫偼丄捀偄偨幨恀傪傕偲偵丄捈姶傪棅傝偵丄幚尡偟傑偟偨丅
巇妡偗偑壗偲偐暘偐傝傑偟偨丅
抁棈売強偼1偐強偩偗側傫偱偡偹丅
偦偆偡傞偲丄Rh~Rw娫丄Rw~Rl娫傪暘埑偱偒傑偟偨丅
弶暔偱偡丅捈姶棅傝偱偟偨乮徫偄
僨僐乕僟IC偭偰弶傔偰尒傑偟偨丄儕儗乕戙傢傝偵側傝傑偡偹両両
Tr偼丄僩儔儞僕僗僞傾儗僀傪巊偊偽嵪傒傑偣偹丅
偁偲丄廐寧偺CD74HC238E偼丄巊偄偙側偣偨傜丄杮摉偵丄
壜曄掞峈婍偺戙傢傝偵側傝偦偆偱偡偹丅
僨乕僞僔乕僩傪尒巒傔傑偟偨丅
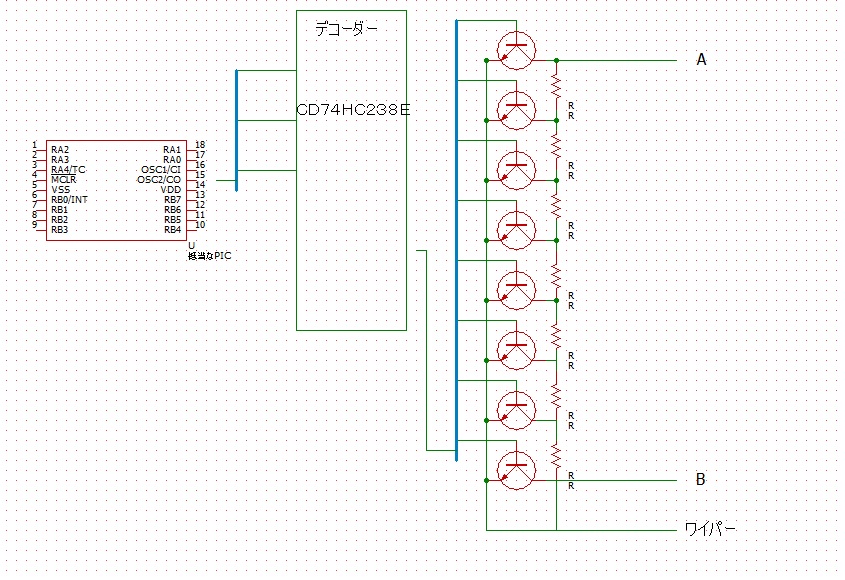
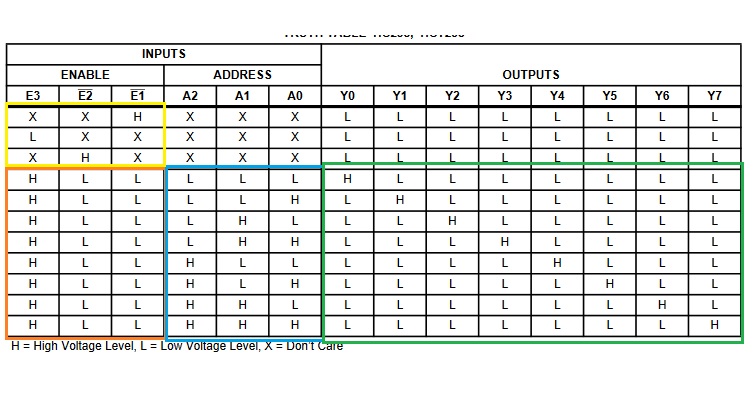
亜偙偺僨僐乕僟俬俠乮廐寧乯傪巊偆偲俁杮偺慄偱丆俉屄偺僩儔儞僕僗僞乕摍偺僐儞僩儘乕儖偑偱偒傞傛偆偱偡丅
偙傟偱偡偑丄僨乕僞僔乕僩傪尒傞偲丄6抂巕傪憖嶌偟側偄偲丄弌椡抂巕傪摿掕偱偒側偄偺偱偼側偄偱偟傚偆偐丠
仏仏仏仏仏仏仏仏仏仏仏
僾儘僌儔儉傪尒傑偟偨丅
傗偼傝恖偺嶌偭偨僾儘僌儔儉偼丄嶌惉幰撈摿偺曄悢昞尰傗娭悢昞尰偑偁偭偰丄側偐側偐棟夝偑恑傒傑偣傫丅
偪傚偭偲栚傪堷偄偨偺偼丄僞僀儅乕0妱崬傒丅
僞僀儅乕侽傪偮偐偭偰丄僇僂儞僩偝偣丄僇僂儞僩傾僢僾偟偨偲偒偵丄
僀儞僞乕儔僢僾娭悢傪偝偣傞偲偄偆巇妡偗偱偡偹丄嶲峫彂傪尒捈偟傑偟偨丅
愜偵怗傟壗搙傕尒偰妎偊傞偭偰姶偠偱偡丅
偱丄
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
偙偺丄PIC偺揹尮ON偺1昩埲撪偵丄AD5220偑婲摦偝偣傞偲偄偆巇妡偱偡偑丄
僀儞僞乕儔僢僾娭悢偵丄f(TEN_UP==0){TEN_KEY_UP_COUNT++;}丂丂偙偺傛偆側丄摍乆偺彂偒崬傒偑偁傞偺偱丄
RB2偑L偵側偭偨傜丄丄丄儃僞儞偑墴偝傟偨偲偄偆姶偠偐側丄
偙偆偄偭偨丄僀儞僞乕儔僢僾娭悢偑廔偊偰丄壓婰偺delay__ms(500)2夞偑棙偄偰丄
5220偑摦嶌奐巒偭偰偄偆偙偲偵側傞偺偱偟傚偆偐丠
丂丂丂婰
TMR0=157;
TMR0IF=0;
OPTION_REG=0b000000101;//2019-5-29曄峏
TMR0IE = 1;//僞僀儅乕0妱傝崬傒敪惗嫋壜
GIE= 1;//妱傝崬傒慡懱偺嫋壜
__delay_ms(500);
__delay_ms(500);
仏仏仏仏仏仏仏仏仏仏仏仏仏仏
壜曄掞峈傪倶俋C偵姺憰偺審
mabo偝傫傕丄戝忎晇偦偆偲偄偭偰榖偟偰偔傟傞偺偱丄
庤傕偪偺壜曄掞峈婍2屄乮侾侽倠偲侾侽侽倠乯傪偮偐偭偰丄暘埑偵傛傝PIC偵揹埑傪報壜偝偣丄
AD僐儞僶乕僩偝偣偰丄LED傪敪岝偝偣偰傒傑偟偨丅
栤戣側偝偦偆偱偟偨丅
偙偺曽朄乮x9c乯傕堷偒懕偒専摙偟偰傒傑偡丅
TR 2019/06/18(Tue) 21:25 No.1694
Re: 懕侾侾乕俹倂俵
 俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偽傫偼丅俿俼偝傫丆妱傝崬傒偺張棟偼擄偟偄偙偲偼偟偰偄傑偣傫丅
俿俬俵俤俼侽偱丆係偮偺僉乕偑墴偝傟偨偙偲傪挷傋偰偄傞偩偗偱偡丅
僠儍僞儕儞僌偑偁傞偺偱丆僞僀儅乕侽偱妱傝崬傫偱丆俉夞墴偝傟偨忬懺偑妋擣偱偒偨傜丆墴偝傟偨偲敾抐偟偰傑偡丅
偦偟偰丆儊僀儞偺曽偱丆妱傝崬傒偺曽偱丆墴偝傟偨偲敾抐偝傟偰丆側偍偐偮僞僋僩僗僀僢僠偑丆棧偝傟偨帪偵丆僞僋僩僗僀僢僠偑墴偝傟偨偲嵟廔揑敾抐傪偟偰丆墴偝傟偨張棟傪偟偰傑偡丅
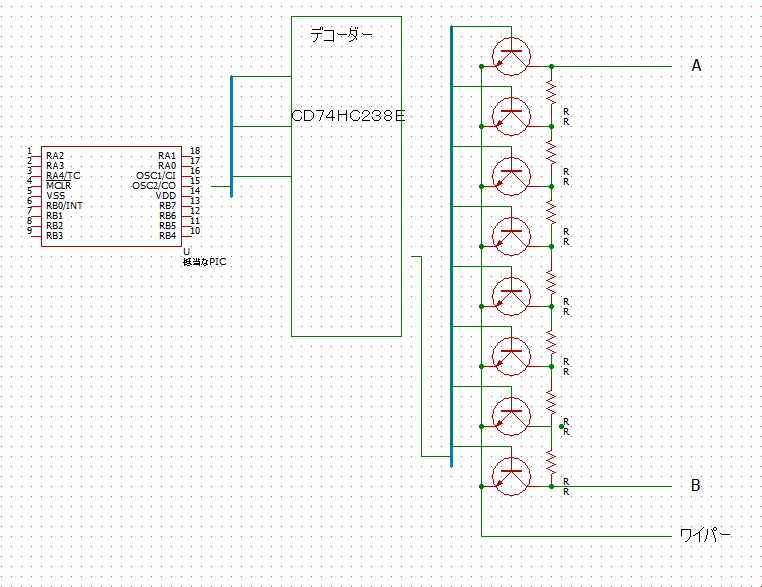
偦傟偐傜丆僄儞僐乕僟俬俠偱偡偑丆堦屄偩偗巊偆側傜丆
愒榞晹暘偼丆捈愙僌儔儞僪偲俆倁偵屌掕偟偰偍偗偽傛偔丆
俹俬俠偐傜丆俁杮偺慄偱丆惵榞偺怣崋傪憲傟偽丆
椢榞撪偺傛偆偵丆俉屄偺偆偪侾屄傪曄峏偱偒傑偡丅
偨偩丆暋悢屄巊偆偲偒偼丆慡晹傪俴偵偡傞応崌傕偱偰偔傞偺偱丆
墿怓晹暘偺1杮傪巊偭偰丆慡晹傪俴偵偡傞昁梫偑偱偰偔傞偺偱丆
慡晹偱俹俬俠偐傜丆係杮偺慄傪巊偄傑偡丅
侾俉僺儞偺俹俬俠傪巊偆偲丆係亊俁偺侾俀僺儞偱丆俁亊俉偱俀係屄偺僩儔儞僕僗僞摍偺僐儞僩儘乕儖偑壜擻偱偡丅
嵟戝巊偊偽侾俇僺儞巊偆俁俀屄偺僐儞僩儘乕儖偱偒傑偡偑丆
俉俉偩偲弌椡偵巊偊傞偺偑丆嵟戝侾俆僺儞偱偡偹丅
傔偄偭傁偄巊偭偰偟傑偆偲懠偺偙偲偑偱偒側偄偺偱丆侾俀僺儞埵偐側偲巚偄傑偡丅
傑偨偼丆傕偭偲僐儞僩儘乕儖偟偨偄偺偱偁傟偽丆
懌偺懡偄偺偱偟傚偆偹丅
仏仏仏捛婰仏仏仏
僾儘僌儔儉偺曽偼丆偁傑傝嵶偐偔傒側偄偱偔偩偝偄丅
偲傝偁偊偢摦偄偨偲偄偆傕偺偱丆
嵶偐偄偙偲栆媿儘僢僋偝傫偺傛偆偵偼偐傫偑偊偰偄傑偣傫丅
嵶晹偵偙偩傢傞偲丆懡暘丆弶婜壔偺張棟偺屻偱丆
妱傝崬傒偺嫋壜偱偟傚偆偹丅
mabo 2019/06/18(Tue) 22:33 No.1695
Re: 懕侾侾乕俹倂俵
>僠儍僞儕儞僌偑偁傞偺偱丆僞僀儅乕侽偱妱傝崬傫偱丆俉夞墴偝傟偨忬懺偑妋擣偱偒偨傜丆墴偝傟偨偲敾抐偟偰傑偡丅
偦偆偄偭偨棟桼偱偡偐丄僠儍僞儕儞僌懳嶔傕戝曄偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
5220偼丄偆傑偔夞偭偰偄傑偡偑丄
儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
幚尡曽朄
侟俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
亜偨偩丆暋悢屄巊偆偲偒偼丆慡晹傪俴偵偡傞応崌傕偱偰偔傞偺偱丆
椆夝偱偡丅
僒儞僉儏僂僨僗丅
偦偆偄偭偨棟桼偱偡偐丄僠儍僞儕儞僌懳嶔傕戝曄偱偡偹丅
亜儌乕僞乕揹尮ON仺仺丂PIC丂ON丂仺丂AD5220乮PIC偺揹尮ON偺堦昩埲撪乯
1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
5220偼丄偆傑偔夞偭偰偄傑偡偑丄
儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
幚尡曽朄
侟俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
亜偨偩丆暋悢屄巊偆偲偒偼丆慡晹傪俴偵偡傞応崌傕偱偰偔傞偺偱丆
椆夝偱偡丅
僒儞僉儏僂僨僗丅
TR 2019/06/18(Tue) 23:01 No.1696
Re: 懕侾侾乕俹倂俵
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
怴偟偄帋傒
5220偺曽丄儌僲僞儘僂偵拲暥偟傑偟偨丅
22擔偼摓拝梊掕偱偡丅
偱丄mabo偝傫偐傜嫵傢偭偨曽朄傪妶梡偟偰埲壓偺曽朄偱幚尡偟偰傒傑偡丅
偳偆偱偟傚偆偐
DC5V揹尮乣VR乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤乮掞峈婍8屄偵傛傞暘埑乯乣敪岝LED
惉岟偟偨傜丄
SEC婎斅乣儘乕僷僗乮PWM婎杮廃攇悢200H倸亖僇僢僩僆僼廃攇悢乯乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤亄Tr乮掞峈婍8屄偵傛傞暘埑偟丄ML4偺壜曄掞峈傪姺憰乯乣ML4
怴偟偄帋傒
5220偺曽丄儌僲僞儘僂偵拲暥偟傑偟偨丅
22擔偼摓拝梊掕偱偡丅
偱丄mabo偝傫偐傜嫵傢偭偨曽朄傪妶梡偟偰埲壓偺曽朄偱幚尡偟偰傒傑偡丅
偳偆偱偟傚偆偐
DC5V揹尮乣VR乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤乮掞峈婍8屄偵傛傞暘埑乯乣敪岝LED
惉岟偟偨傜丄
SEC婎斅乣儘乕僷僗乮PWM婎杮廃攇悢200H倸亖僇僢僩僆僼廃攇悢乯乣PIC乮AD僐儞僶乕僩抣傪8暘妱乯乣乣俠俢俈係俫俠俀俁俉俤亄Tr乮掞峈婍8屄偵傛傞暘埑偟丄ML4偺壜曄掞峈傪姺憰乯乣ML4
TR 2019/06/19(Wed) 08:05 No.1697
Re: 懕侾侾乕俹倂俵
俿俼偝傫丆栆媿儘僢僋偝傫丆偙傫偵偪偼丅
亜5220偼丄偆傑偔夞偭偰偄傑偡偑丄
亜儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
偄偊丆奜晹偺俹倂俵偺怣崋偼偄傟偰側偄偺偱丆儘乕僷僗僼傿儖僞乕偼丆巊偭偰傑偣傫丅
拞壺惢俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆俙俢俆俀俀侽偵抲偒姺偊偨偩偗偱偡丅
丂俹俬俠仺仺俙俢俆俀俀侽仺仺拞壺惢僐儞僩儘乕儔仺仺儌乕僞乕
偺攝抲偱偡丅
巹偑宖嵹偟偨丆幨恀偱偡偑丆儚僀僷乕偺晹暘偵丆掞峈擖傟偰偍偄偨曽偑偄偄偐傕偱偡偹丅
堦斣抂偵堏摦偝偣偨偲偒丆抁棈偡傞偙偲偵側傞偺偱丆
掞峈擖傟偰偍偄偨曽偑埨慡偐傕偱偡偹丅
俿俼偝傫丆儌僲僞儘僂丆偄偄抣抜偟傑偡偹丅
栺丆攞偖傜偄偐側偁丅
亜1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
亜偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
堦墳丆偦偺偮傕傝偱丆擮偺偨傔俀僇強偵delay_ms偄傟傑偟偨丅
偒偄偰偄傞偐偳偆偐偼丠偱偡偗偳丅
亜5220偼丄偆傑偔夞偭偰偄傑偡偑丄
亜儘乕僷僗僼傿儖僞乕傪巊偭偰偄傑偡偐丠
偄偊丆奜晹偺俹倂俵偺怣崋偼偄傟偰側偄偺偱丆儘乕僷僗僼傿儖僞乕偼丆巊偭偰傑偣傫丅
拞壺惢俹倂俵僐儞僩儘乕儔乕偺儃儕儏乕儉傪丆俙俢俆俀俀侽偵抲偒姺偊偨偩偗偱偡丅
丂俹俬俠仺仺俙俢俆俀俀侽仺仺拞壺惢僐儞僩儘乕儔仺仺儌乕僞乕
偺攝抲偱偡丅
巹偑宖嵹偟偨丆幨恀偱偡偑丆儚僀僷乕偺晹暘偵丆掞峈擖傟偰偍偄偨曽偑偄偄偐傕偱偡偹丅
堦斣抂偵堏摦偝偣偨偲偒丆抁棈偡傞偙偲偵側傞偺偱丆
掞峈擖傟偰偍偄偨曽偑埨慡偐傕偱偡偹丅
俿俼偝傫丆儌僲僞儘僂丆偄偄抣抜偟傑偡偹丅
栺丆攞偖傜偄偐側偁丅
亜1昩埲撪偵5220傪摦嶌偣偣傞僾儘僌儔儉偼丄__delay_ms(500);__delay_ms(500);
亜偙偺2峴偱憖嶌偟偰偄傞偺偱偟傚偆偐丠
堦墳丆偦偺偮傕傝偱丆擮偺偨傔俀僇強偵delay_ms偄傟傑偟偨丅
偒偄偰偄傞偐偳偆偐偼丠偱偡偗偳丅
mabo 2019/06/19(Wed) 12:15 No.1698