僩僺僢僋娭楢婰帠
48帪娫埲撪偺婰帠偼  偱昞帵偝傟傑偡
偱昞帵偝傟傑偡
偱昞帵偝傟傑偡
Re: 懕俉乕俹倂俵
 mabo偝傫偍旀傟偝傑丄
mabo偝傫偍旀傟偝傑丄奆偝傫偙傫偽傫偼丅
儅僢僴偺丄[CLOSED LOOP]偺愝掕曽朄傪嫵偊偰偔偩偝偄丅
帺暘偺僗僺儞僪儖儌乕僞乕偵偼丄僄儞僐乕僟乕偺傛偆側傕偺偑偁傝傑偣傫丅
偦傟偱傕丄[CLOSED LOOP]偵僠僃僢僋傪擖傟偨傝丄P I D偵壗偐偟傜偺悢抣傪擖傟傞偺偱偟傚偆偐丠
偛徯夘偔偩偝偭偨儁乕僕丄擄偟偦偆偱偡偹丅
https://ja.wikipedia.org/wiki/PID惂屼
僨僼僅儖僩偱傕悢抣偑擖偭偰偄傑偟偨偑丄傗偼傝楳傜側偔偪傖偄偗側偄偺偱偟傚偆偐丠丠
撉傫偱傒傑偡偑丄傢偐傜側偐偭偨傜丄嵞搙搳峞偟傑偡偺偱丄偦偺愡偼媂偟偔偍婅偄偟傑偡丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
栆媿儘僢僋偝傫傊
僾儘僌儔儉偺審丄椆夝偟傑偟偨丅
偦傟偲丄
No侾俇侾俈偺偍幨恀偡傒傑偣傫丅
椆夝偟傑偟偨丅
婛偵幨恀偺壜曄掞峈偑寢慄偝傟偨婛懚偺忬懺偱掞峈傪應偭偰偁傝傑偡丅
側傫偲丄嵟戝偱侾兌偱偟偨丅丂奜偟偰丄傕偆堦搙掞峈抣傪妋擣偟傑偡丅
傑偨丄寢慄忬懺偱丄幨恀売強偺揹棳傕恾傝傑偡丅
偱丄側傫偱偡偑丄
幨恀塃偺僥僗僩偱偡偑丄婛懚偺僔僗僥儉偩偗偱僥僗僩偱偡偐丠
婛懚偩偗偱偟偨傜丄偁傑傝堄枴偑側偄傛偆偱偡偑丅
掶惓偲偍榣傃
侾兌丂惓偟偔偼丄侾倠兌
偱偟偨丅嵪傒傑偣傫偱偟偨丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊
亜
侟SEC乮俹倂俵弌椡乯丂仺丂儘乕僷僗僼傿儖僞乕乮捈棳曄姺乯丂仺X9C丂仺丂僐儞僩儘乕儔乕乮揹埑惂屼乯仺揔摉側DC儌乕僞乕
乮僐儞僩儘乕儔乕偺儃儕儏乕儉偲X9C傪抲偒姺偊丅乯
夝庍偱偡偑丄
揔摉側DC儌乕僞乕乮僐儞僩儘乕儔乕偺儃儕儏乕儉偲X9C傪抲偒姺偊丅乯偲偁傝傑偡丅
DC儌乕僞乕偵妵屖傪偮偗偰丄敳偒弌偟偰偄傑偡丅丂DC儌乕僞乕偵晅懏偡傞壗偐偑偁偭偰丄
偦偺壗偐偱壗傪偡傞偺偱偟傚偆偐丠丠
偦傟偲丄SEC仺仺儘乕僷僗僼傿儖僞乕丂仺仺丂PIC偺AD曄姺丂仺仺丂X9C丂仺仺丂ML係
偙傟偱偡偑丄
儘乕僷僗僼傿儖僞乕偱丄PWM傪暯弨壔偟傑偡傛偹丄偱丄偙偺棳傟偩偲丄PIC偲x9c偵傛偭偰丄傕偆堦搙
捈棳偺揹埑傪暯弨壔偟傑偡丅丂偙傟偱偼丄俀搙暯弨壔偟傑偡傛両両
偙傟偱傕椙偄偺偱偟傚偆偐丠丂偪傚偭偲尒丄柍懯側姶偠偑偟傑偡丅
偙偺偙偲偼丄栆媿儘僢僋偝傫傕尵傢傟偰偄傞偙偲偩偲巚偭偰偄傑偟偨偑丅
 TR
TR  2019/06/08(Sat) 20:13 No.1618
2019/06/08(Sat) 20:13 No.1618
Re: 懕俉乕俹倂俵
俿俼偝傫丆偙傫偽傫偼丅
偡傒傑偣傫娫堘偄偑偁傝傑偟偨丅
侟SEC乮俹倂俵弌椡乯丂仺丂儘乕僷僗僼傿儖僞乕乮捈棳曄姺乯丂仺X9C丂仺丂僐儞僩儘乕儔乕乮揹埑惂屼乯仺揔摉側DC儌乕僞乕
乮僐儞僩儘乕儔乕偺儃儕儏乕儉偲X9C傪抲偒姺偊丅乯
偙傟丆
侟俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
偱丆俹俬俠偺俙俢曄姺偑偸偗偰傑偟偨丅
妵屖偺側偐偼丆偙偺棳傟偩偲丆俹倂俵偺僐儞僩儘乕儔乕偺
儃儕儏乕儉偲倃俋俠傪抲偒姺偊偰丆妋偐傔傞丆偺堄枴偱偟偨丅
儌乕僞乕偵偼丆壗傕偟側偔偰戝忎晇偱偡丅
亜偦傟偲丄SEC仺仺儘乕僷僗僼傿儖僞乕丂仺仺丂PIC偺AD曄姺丂仺仺丂X9C丂仺仺丂ML係
亜偙傟偱偡偑丄
亜儘乕僷僗僼傿儖僞乕偱丄PWM傪暯弨壔偟傑偡傛偹丄偱丄偙偺棳傟偩偲丄PIC偲x9c偵傛偭偰丄傕偆堦搙
亜捈棳偺揹埑傪暯弨壔偟傑偡丅丂偙傟偱偼丄俀搙暯弨壔偟傑偡傛両両
亜偙傟偱傕椙偄偺偱偟傚偆偐丠丂偪傚偭偲尒丄柍懯側姶偠偑偟傑偡丅
亜偙偺偙偲偼丄栆媿儘僢僋偝傫傕尵傢傟偰偄傞偙偲偩偲巚偭偰偄傑偟偨偑丅
偙傟偱偡偑丆俹俬俠偱傗偭偰傞偙偲偼丆
儘乕僷僗僼傿儖僞乕偱撉傒庢偭偨揹埑傪側傜偟偰丆
偦傟偵墳偠偨倃俋俠偺愝掕傪偡傞偙偲偱偡丅
儘乕僷僗僼傿儖僞乕偱傗傞偙偲偲丆俹俬俠偱側傜偡偙偲偼丆
偳偪傜傕昁梫側偙偲偩偲巚偄傑偡丅
儘乕僷僗僼傿儖僞乕傪捠偭偨怣崋偵棎傟偑偁傞偺偱丆
撉傒庢傞偨傔偵丆壗夞偐暯嬒傪偲偭偰傑偡丅
偙偺暯嬒偵婎偯偄偰丆倃俋俠偺愝掕傪偟傑偡丅
偦傟偐傜丆俹丂俬丂俢偺愝掕偱偡偗偳丆
偡傒傑偣傫丆尋媶拞偱偡丅
側偐側偐偆傑偔偄偒傑偣傫丅
偡傒傑偣傫娫堘偄偑偁傝傑偟偨丅
侟SEC乮俹倂俵弌椡乯丂仺丂儘乕僷僗僼傿儖僞乕乮捈棳曄姺乯丂仺X9C丂仺丂僐儞僩儘乕儔乕乮揹埑惂屼乯仺揔摉側DC儌乕僞乕
乮僐儞僩儘乕儔乕偺儃儕儏乕儉偲X9C傪抲偒姺偊丅乯
偙傟丆
侟俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
偱丆俹俬俠偺俙俢曄姺偑偸偗偰傑偟偨丅
妵屖偺側偐偼丆偙偺棳傟偩偲丆俹倂俵偺僐儞僩儘乕儔乕偺
儃儕儏乕儉偲倃俋俠傪抲偒姺偊偰丆妋偐傔傞丆偺堄枴偱偟偨丅
儌乕僞乕偵偼丆壗傕偟側偔偰戝忎晇偱偡丅
亜偦傟偲丄SEC仺仺儘乕僷僗僼傿儖僞乕丂仺仺丂PIC偺AD曄姺丂仺仺丂X9C丂仺仺丂ML係
亜偙傟偱偡偑丄
亜儘乕僷僗僼傿儖僞乕偱丄PWM傪暯弨壔偟傑偡傛偹丄偱丄偙偺棳傟偩偲丄PIC偲x9c偵傛偭偰丄傕偆堦搙
亜捈棳偺揹埑傪暯弨壔偟傑偡丅丂偙傟偱偼丄俀搙暯弨壔偟傑偡傛両両
亜偙傟偱傕椙偄偺偱偟傚偆偐丠丂偪傚偭偲尒丄柍懯側姶偠偑偟傑偡丅
亜偙偺偙偲偼丄栆媿儘僢僋偝傫傕尵傢傟偰偄傞偙偲偩偲巚偭偰偄傑偟偨偑丅
偙傟偱偡偑丆俹俬俠偱傗偭偰傞偙偲偼丆
儘乕僷僗僼傿儖僞乕偱撉傒庢偭偨揹埑傪側傜偟偰丆
偦傟偵墳偠偨倃俋俠偺愝掕傪偡傞偙偲偱偡丅
儘乕僷僗僼傿儖僞乕偱傗傞偙偲偲丆俹俬俠偱側傜偡偙偲偼丆
偳偪傜傕昁梫側偙偲偩偲巚偄傑偡丅
儘乕僷僗僼傿儖僞乕傪捠偭偨怣崋偵棎傟偑偁傞偺偱丆
撉傒庢傞偨傔偵丆壗夞偐暯嬒傪偲偭偰傑偡丅
偙偺暯嬒偵婎偯偄偰丆倃俋俠偺愝掕傪偟傑偡丅
偦傟偐傜丆俹丂俬丂俢偺愝掕偱偡偗偳丆
偡傒傑偣傫丆尋媶拞偱偡丅
側偐側偐偆傑偔偄偒傑偣傫丅
 mabo 2019/06/08(Sat) 20:46 No.1619
mabo 2019/06/08(Sat) 20:46 No.1619
Re: 懕俉乕俹倂俵
mabo偝傫傊
亜偙傟偱偡偑丆俹俬俠偱傗偭偰傞偙偲偼丆
儘乕僷僗僼傿儖僞乕偱撉傒庢偭偨揹埑傪側傜偟偰丆
偦傟偵墳偠偨倃俋俠偺愝掕傪偡傞偙偲偱偡丅
儘乕僷僗僼傿儖僞乕偱傗傞偙偲偲丆俹俬俠偱側傜偡偙偲偼丆
偳偪傜傕昁梫側偙偲偩偲巚偄傑偡丅
儘乕僷僗僼傿儖僞乕傪捠偭偨怣崋偵棎傟偑偁傞偺偱丆
撉傒庢傞偨傔偵丆壗夞偐暯嬒傪偲偭偰傑偡丅
偙偺暯嬒偵婎偯偄偰丆倃俋俠偺愝掕傪偟傑偡丅
戝曄嫲弅偱偡偑丄搟傜側偄偱壓偝偄丅
x9c偼丄暯弨壔僾儘僌儔儉崬傒偺PIC偱巊偄傑偡丅
僐儞僨儞僒偲掞峈偼丄柍偔偰嵪傓側傜巊傢側偄曽偑椙偄偲巚偄傑偡丅
側偺偱丄愭偢偼丄x9c偼丄暯弨壔僾儘僌儔儉崬傒偺PIC偺攇宍傪僆僔儘偱斾傋偰傒偰丄偦傟偱傕捛偄偮偐側偄傛偆偱偟偨傜丄
儘乕僷僗僼傿儖僞乕傕暪偣偰巊偭偨曽偑椙偄偲巚偄傑偡傛丅
杮摉偵偛傔傫側偝偄丅丂尵偄夁偓偐傕丅
亜偙傟偱偡偑丆俹俬俠偱傗偭偰傞偙偲偼丆
儘乕僷僗僼傿儖僞乕偱撉傒庢偭偨揹埑傪側傜偟偰丆
偦傟偵墳偠偨倃俋俠偺愝掕傪偡傞偙偲偱偡丅
儘乕僷僗僼傿儖僞乕偱傗傞偙偲偲丆俹俬俠偱側傜偡偙偲偼丆
偳偪傜傕昁梫側偙偲偩偲巚偄傑偡丅
儘乕僷僗僼傿儖僞乕傪捠偭偨怣崋偵棎傟偑偁傞偺偱丆
撉傒庢傞偨傔偵丆壗夞偐暯嬒傪偲偭偰傑偡丅
偙偺暯嬒偵婎偯偄偰丆倃俋俠偺愝掕傪偟傑偡丅
戝曄嫲弅偱偡偑丄搟傜側偄偱壓偝偄丅
x9c偼丄暯弨壔僾儘僌儔儉崬傒偺PIC偱巊偄傑偡丅
僐儞僨儞僒偲掞峈偼丄柍偔偰嵪傓側傜巊傢側偄曽偑椙偄偲巚偄傑偡丅
側偺偱丄愭偢偼丄x9c偼丄暯弨壔僾儘僌儔儉崬傒偺PIC偺攇宍傪僆僔儘偱斾傋偰傒偰丄偦傟偱傕捛偄偮偐側偄傛偆偱偟偨傜丄
儘乕僷僗僼傿儖僞乕傕暪偣偰巊偭偨曽偑椙偄偲巚偄傑偡傛丅
杮摉偵偛傔傫側偝偄丅丂尵偄夁偓偐傕丅
TR 2019/06/08(Sat) 21:11 No.1620
Re: 懕俉乕俹倂俵
俿俼偝傫丄偙傫偽傫偼丅
亜戝曄嫲弅偱偡偑丄搟傜側偄偱壓偝偄丅
戝忎晇偱偡傛丅
儘乕僷僗僼傿儖僞乕巊傢側偄偺偱偁傟偽丄僨僕僞儖偱庴偗庢傞
偲偄偆偙偲偵側傞偲巚偄傑偡丅
偦偆偡傞偲丄栆媿儘僢僋偝傫偑丄彂偄偰偔傟偨屻偺曽偺僾儘僌儔儉偍巊偄偄側傞偺偐側丅
俙俢曄姺偟側偄偱丄僨僕僞儖偱庴偗庢偭偨傕偺傪張棟偟偨曽偑丄
僲僀僘摍偺怱攝傕彮側偔側傝傑偡偟偹丅
栆媿儘僢僋偝傫傕丄僨僕僞儖偱庴偗庢傞曽偑岲傒偩偲偍偭偟傖偭偰傑偟偨丅
崱擔偼丄僪儔僀僶乕嶌偭偰丄俿俲100俙0俉俶1偲偄偆俥俤俿偱丄
夞揮悢挷傋偰偄傑偟偨丅
夞揮巒傔偐傜丄嵟崅夞揮傑偱偺丄斖埻偑丄嫹偄傛偆偱偟偨丅
俹倂俵偺僐儞僩儘乕儔乕偼丄俢倀俿倄斾偑4亾乣69亾偺斖埻偱
摦偄偰偄傑偟偨偑丄
崱夞攦偄媮傔偨偺偼丄12亾乣48亾偲嫹偔側傝傑偟偨丅
俥俤俿嵎偟懼偊傜傟傞傛偆偵偟傑偟偨偺偱丄
偄偔偮偐曄偊偰丄専徹偟偰傒傛偆偐側偲巚偄傑偡丅
亜戝曄嫲弅偱偡偑丄搟傜側偄偱壓偝偄丅
戝忎晇偱偡傛丅
儘乕僷僗僼傿儖僞乕巊傢側偄偺偱偁傟偽丄僨僕僞儖偱庴偗庢傞
偲偄偆偙偲偵側傞偲巚偄傑偡丅
偦偆偡傞偲丄栆媿儘僢僋偝傫偑丄彂偄偰偔傟偨屻偺曽偺僾儘僌儔儉偍巊偄偄側傞偺偐側丅
俙俢曄姺偟側偄偱丄僨僕僞儖偱庴偗庢偭偨傕偺傪張棟偟偨曽偑丄
僲僀僘摍偺怱攝傕彮側偔側傝傑偡偟偹丅
栆媿儘僢僋偝傫傕丄僨僕僞儖偱庴偗庢傞曽偑岲傒偩偲偍偭偟傖偭偰傑偟偨丅
崱擔偼丄僪儔僀僶乕嶌偭偰丄俿俲100俙0俉俶1偲偄偆俥俤俿偱丄
夞揮悢挷傋偰偄傑偟偨丅
夞揮巒傔偐傜丄嵟崅夞揮傑偱偺丄斖埻偑丄嫹偄傛偆偱偟偨丅
俹倂俵偺僐儞僩儘乕儔乕偼丄俢倀俿倄斾偑4亾乣69亾偺斖埻偱
摦偄偰偄傑偟偨偑丄
崱夞攦偄媮傔偨偺偼丄12亾乣48亾偲嫹偔側傝傑偟偨丅
俥俤俿嵎偟懼偊傜傟傞傛偆偵偟傑偟偨偺偱丄
偄偔偮偐曄偊偰丄専徹偟偰傒傛偆偐側偲巚偄傑偡丅
mabo 2019/06/08(Sat) 23:25 No.1621
Re: 懕俉乕俹倂俵
>丂TR偝傫
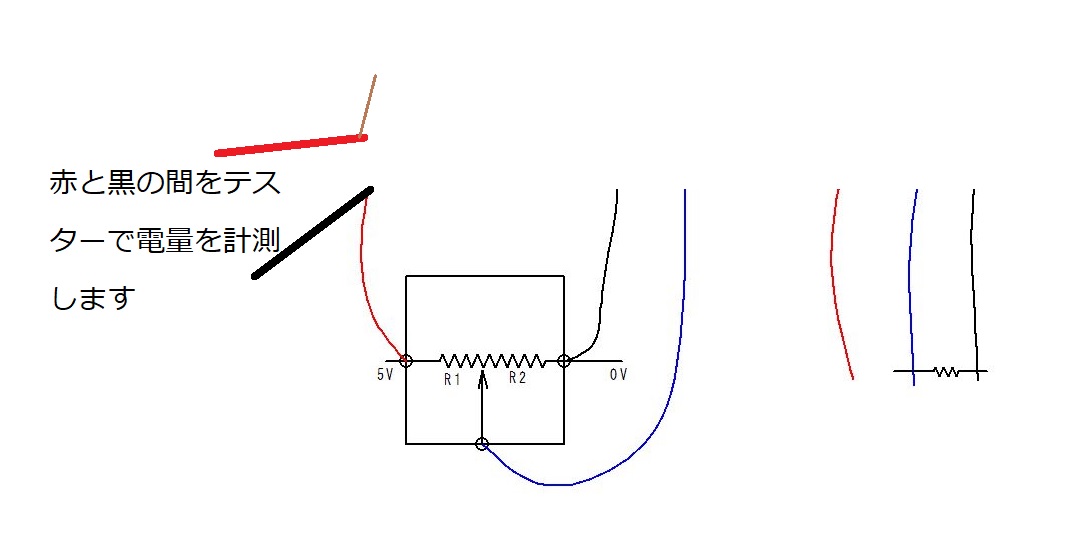
傗偭偰偄傞帠偺堄枴偑傢偐傝傑偣傫偗偳丄撪晹傪寁應偟偨偄側傜壜曄掞峈傪奜偟偨曽偑椙偄偱偡丅
宷偑偭偨忬懺偩偲儃儕儏乕儉埵抲偱掞峈抣偑曄傢傝傑偡丅
僗僺儞僪儖偺姫偒慄掞峈傪挷傋偰偄傞傫偱偡偐丠
> 幨恀塃偺僥僗僩偱偡偑丄婛懚偺僔僗僥儉偩偗偱僥僗僩偱偡偐丠
偦偆偱偡丅偦偺壜曄掞峈傪1杮偺掞峈偱抲偒姺偊偰丄偦偺壜曄掞峈偺堄枴傪挷傋傑偡丅
偮傑傝丄偳偆偄偭偨夞楬傪偦偙偵宷偘偽惂屼弌棃傞偺偐丄偲偄偆丄堦斣嵟弶偵傗傞傋偒偙偲偱偡丅
擖岥乮PC偐傜偺PWM乯偲弌岥乮僗僺儞僪儖傊偺弌椡乯偺巇條偑敾傜側偗傟偽丄摦偔偐偳偆偐暦偐傟偰傕敾抐偑晅偒傑偣傫丅
偦傟偲丄8屄偺暯嬒傪弌偟偨偺偼傾僫儘僌庴怣偺僾儘僌儔儉偱偡丅僨僕僞儖側傜100埲忋偵偟偨曽偑椙偄偱偡丅
捛婰偟傑偡
僗僺儞僪儖偺婎斅偐傜夞楬乮巊偭偰偄傞IC乯偑夝傞側傜丄偦傟偱傕峔偄傑偣傫丅
傗偭偰偄傞帠偺堄枴偑傢偐傝傑偣傫偗偳丄撪晹傪寁應偟偨偄側傜壜曄掞峈傪奜偟偨曽偑椙偄偱偡丅
宷偑偭偨忬懺偩偲儃儕儏乕儉埵抲偱掞峈抣偑曄傢傝傑偡丅
僗僺儞僪儖偺姫偒慄掞峈傪挷傋偰偄傞傫偱偡偐丠
> 幨恀塃偺僥僗僩偱偡偑丄婛懚偺僔僗僥儉偩偗偱僥僗僩偱偡偐丠
偦偆偱偡丅偦偺壜曄掞峈傪1杮偺掞峈偱抲偒姺偊偰丄偦偺壜曄掞峈偺堄枴傪挷傋傑偡丅
偮傑傝丄偳偆偄偭偨夞楬傪偦偙偵宷偘偽惂屼弌棃傞偺偐丄偲偄偆丄堦斣嵟弶偵傗傞傋偒偙偲偱偡丅
擖岥乮PC偐傜偺PWM乯偲弌岥乮僗僺儞僪儖傊偺弌椡乯偺巇條偑敾傜側偗傟偽丄摦偔偐偳偆偐暦偐傟偰傕敾抐偑晅偒傑偣傫丅
偦傟偲丄8屄偺暯嬒傪弌偟偨偺偼傾僫儘僌庴怣偺僾儘僌儔儉偱偡丅僨僕僞儖側傜100埲忋偵偟偨曽偑椙偄偱偡丅
捛婰偟傑偡
僗僺儞僪儖偺婎斅偐傜夞楬乮巊偭偰偄傞IC乯偑夝傞側傜丄偦傟偱傕峔偄傑偣傫丅
栆媿儘僢僋 2019/06/08(Sat) 23:41 No.1622
Re: 懕俉乕俹倂俵
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
亜偦偆偡傞偲丄栆媿儘僢僋偝傫偑丄彂偄偰偔傟偨屻偺曽偺僾儘僌儔儉偍巊偄偄側傞偺偐側丅
No1553偱偡偐丄侾俆俆俁偼擄偟偔偰丄丄丄棟夝偱偒傑偣傫偱偟偨丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
栆媿儘僢僋偝傫偍偼傛偆偛偞偄傑偡丅
婛懚偺帒椏偼壗傕側偄偺偱丄暘偐傝傑偣傫丅
側偺偱丄夵憿偱偒偦偆側僗僺乕僪僐儞僩儘乕儖偵巊傢傟偰偄傞壜曄掞峈傪x9c偵曄偊傛偆偲偟偰偄傑偡丅
偱丄
偁偊偰丄壜曄掞峈傪奜偟偰丄掞峈傪擖傟偰丄婛懚僔僗僥儉偱僗僺儞僪儖傪夞偡偲偄偆偙偲偼丄
偦偺棟桼偑暘偐傝傑偣傫丅
暘偐傜側偄偲偄偆棟桼
壜曄掞峈偱夞傞偺偱偟傚偆偐傜丄屌掕掞峈偵抲偒姺偊偰傕丄僗僺乕僪偼暘偐傝傑偣傫偑丄夞傞偲巚偄傑偡丅
偟偐偟側偑傜僥僗僩傪偡傞偙偲偲偼丄丄丄傪峫偊傞偲丅
偦傟偱傕僥僗僩偡傞偲偄偆偙偲偼丄
壜曄掞峈偑妋幚偵丄僗僺儞僪儖儌乕僞乕偺僗僺乕僪僐儞僩儘乕儖偵婑梌偟偰偄傞偐偳偆偐傪
妋擣偡傞偲偄偆偙偲側傫偱偟傚偆偹丅
暘偐傝傑偟偨丅丂傗偭偰傒傑偡丅
僥僗僩曽朄
嵞搙丄壜曄掞峈偺嵟戝掞峈抣傪寁應偟丄偦偺掞峈抣偺敿暘埲忋傪巊偭偰丄婛懚僔僗僥儉偱丄傑傢偟偰傒傞丅
亜偦傟偲丄8屄偺暯嬒傪弌偟偨偺偼傾僫儘僌庴怣偺僾儘僌儔儉偱偡丅僨僕僞儖側傜100埲忋偵偟偨曽偑椙偄偱
僒儞僾儕儞僌夞悢傪曄偊傞応崌丄僾儘僌儔儉傪堦晹傪曄偊傞偑丄
僨僶僀僗偺弶婜壔娭悢偼丄僨僶僀僗偺娭學偱500偑忋尷偲尵偭偰偄傑偟偨丅
嶼弌曽朄
PWM婎杮廃攇悢/僒儞僾儖悢
椺
100Hz側傜丄侾廃婜亖0.01倱
俉僒儞僾儖偱0.01/8亖0.00125倱亖侾俀俆侽兪倱
俉僒儞僾儖偱侾俀俆侽丄側偺偵丄侾侽侽僒儞僾儖丄丄
僨僶僀僗偺忋尷傪挻偊偰偄傞偺偱丄丄丄丄
仏仏仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫丄丄丄丄
儘乕僷僗偲暪梡偱偡傛両両丂懡暘丅
亜偦偆偡傞偲丄栆媿儘僢僋偝傫偑丄彂偄偰偔傟偨屻偺曽偺僾儘僌儔儉偍巊偄偄側傞偺偐側丅
No1553偱偡偐丄侾俆俆俁偼擄偟偔偰丄丄丄棟夝偱偒傑偣傫偱偟偨丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
栆媿儘僢僋偝傫偍偼傛偆偛偞偄傑偡丅
婛懚偺帒椏偼壗傕側偄偺偱丄暘偐傝傑偣傫丅
側偺偱丄夵憿偱偒偦偆側僗僺乕僪僐儞僩儘乕儖偵巊傢傟偰偄傞壜曄掞峈傪x9c偵曄偊傛偆偲偟偰偄傑偡丅
偱丄
偁偊偰丄壜曄掞峈傪奜偟偰丄掞峈傪擖傟偰丄婛懚僔僗僥儉偱僗僺儞僪儖傪夞偡偲偄偆偙偲偼丄
偦偺棟桼偑暘偐傝傑偣傫丅
暘偐傜側偄偲偄偆棟桼
壜曄掞峈偱夞傞偺偱偟傚偆偐傜丄屌掕掞峈偵抲偒姺偊偰傕丄僗僺乕僪偼暘偐傝傑偣傫偑丄夞傞偲巚偄傑偡丅
偟偐偟側偑傜僥僗僩傪偡傞偙偲偲偼丄丄丄傪峫偊傞偲丅
偦傟偱傕僥僗僩偡傞偲偄偆偙偲偼丄
壜曄掞峈偑妋幚偵丄僗僺儞僪儖儌乕僞乕偺僗僺乕僪僐儞僩儘乕儖偵婑梌偟偰偄傞偐偳偆偐傪
妋擣偡傞偲偄偆偙偲側傫偱偟傚偆偹丅
暘偐傝傑偟偨丅丂傗偭偰傒傑偡丅
僥僗僩曽朄
嵞搙丄壜曄掞峈偺嵟戝掞峈抣傪寁應偟丄偦偺掞峈抣偺敿暘埲忋傪巊偭偰丄婛懚僔僗僥儉偱丄傑傢偟偰傒傞丅
亜偦傟偲丄8屄偺暯嬒傪弌偟偨偺偼傾僫儘僌庴怣偺僾儘僌儔儉偱偡丅僨僕僞儖側傜100埲忋偵偟偨曽偑椙偄偱
僒儞僾儕儞僌夞悢傪曄偊傞応崌丄僾儘僌儔儉傪堦晹傪曄偊傞偑丄
僨僶僀僗偺弶婜壔娭悢偼丄僨僶僀僗偺娭學偱500偑忋尷偲尵偭偰偄傑偟偨丅
嶼弌曽朄
PWM婎杮廃攇悢/僒儞僾儖悢
椺
100Hz側傜丄侾廃婜亖0.01倱
俉僒儞僾儖偱0.01/8亖0.00125倱亖侾俀俆侽兪倱
俉僒儞僾儖偱侾俀俆侽丄側偺偵丄侾侽侽僒儞僾儖丄丄
僨僶僀僗偺忋尷傪挻偊偰偄傞偺偱丄丄丄丄
仏仏仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫丄丄丄丄
儘乕僷僗偲暪梡偱偡傛両両丂懡暘丅
TR 2019/06/09(Sun) 07:18 No.1623
Re: 懕俉乕俹倂俵
> 嵞搙丄壜曄掞峈偺嵟戝掞峈抣傪寁應偟丄偦偺掞峈抣偺敿暘埲忋傪巊偭偰丄婛懚僔僗僥儉偱丄傑傢偟偰傒傞丅
壜曄掞峈偺嵟戝抣偺1攞乮乣10攞掱搙乯傑偱側傜偳傟偱傕椙偄偱偡丅偨偩偟丄抣偼妎偊偰偍偄偰偔偩偝偄丅
壜曄掞峈偺嵟戝抣乮屌掕偝傟偨抂巕娫乯偼奜偟偨忬懺偱應偭偰偔偩偝偄丅
傑偢丄偦偺3杮傪奜偟偨忬懺偱丄揹尮傪擖傟偰丄愒-崟娫偺揹埑傪寁應偟偰偔偩偝偄丅
傕偟偐偟偨傜崅偄揹埑偐傕抦傟傑偣傫丅
乮偙偙偱5V側傜偄偄寢壥偑婜懸弌棃傑偡丅崅偄揹埑偩偲尩偟偔側傝傑偡乯
尦偺壜曄掞峈偺屌掕晹傪巊偭偰愗傝懼偊偰傕椙偄偱偡丅
忋恾偱丄
乽愒偲惵傪巊偭偰嵟崅懍丄崟偲惵傪巊偭偰摦偐側偄乿偲偄偆偺偑乽椙偄寢壥乿偱偡丅
側偺偱丄偦傟偱僥僗僩廔椆偱偡丅
偦傟埲奜偺寢壥偺応崌偼乧
傑偀偦偺帪峫偊傑偟傚偆丅
壜曄掞峈偺嵟戝抣偺1攞乮乣10攞掱搙乯傑偱側傜偳傟偱傕椙偄偱偡丅偨偩偟丄抣偼妎偊偰偍偄偰偔偩偝偄丅
壜曄掞峈偺嵟戝抣乮屌掕偝傟偨抂巕娫乯偼奜偟偨忬懺偱應偭偰偔偩偝偄丅
傑偢丄偦偺3杮傪奜偟偨忬懺偱丄揹尮傪擖傟偰丄愒-崟娫偺揹埑傪寁應偟偰偔偩偝偄丅
傕偟偐偟偨傜崅偄揹埑偐傕抦傟傑偣傫丅
乮偙偙偱5V側傜偄偄寢壥偑婜懸弌棃傑偡丅崅偄揹埑偩偲尩偟偔側傝傑偡乯
尦偺壜曄掞峈偺屌掕晹傪巊偭偰愗傝懼偊偰傕椙偄偱偡丅
忋恾偱丄
乽愒偲惵傪巊偭偰嵟崅懍丄崟偲惵傪巊偭偰摦偐側偄乿偲偄偆偺偑乽椙偄寢壥乿偱偡丅
側偺偱丄偦傟偱僥僗僩廔椆偱偡丅
偦傟埲奜偺寢壥偺応崌偼乧
傑偀偦偺帪峫偊傑偟傚偆丅
栆媿儘僢僋 2019/06/09(Sun) 08:54 No.1624
Re: 懕俉乕俹倂俵
俿俼偝傫丆栆媿儘僢僋偝傫丆偍偼傛偆偛偞偄傑偡丅
俿俼偝傫丆偛巜揈偁傝偑偲偆偛偞偄傑偡丅
亜mabo偝傫丄丄丄丄
亜儘乕僷僗偲暪梡偱偡傛両両丂懡暘丅
偙傟丆僽儘僌偺曽偺丆婎杮廃攇悢偺曄姺偺僾儘僌儔儉偱偡偐丠丅
壗擭偐慜偵丆嵟弶偵庢傝慻傫偩帪偵丆偙傟偱偼傑傝傑偟偨丅
僾儘僌儔儉偼奜崙偺彅孼丆夞楬偼擔杮偺彅孼丆
偲偄偆慻傒崌傢偣偱丆儘乕僷僗僼傿儖僞乕擖傟偰丆傕偑偒傑偟偨丅
寢壥丆儘乕僷儖僼傿儖僞擖傟傞偲僨僕僞儖偺僒儞僾儕儞僌
偱偒側偔側傝傑偟偨丅
崱偼丆側傫偲側偔棟夝偱偒傞偺偱偡偑丒丒丒丒丒丒丒丅
偦傟偐傜丆僒儞僾儕儞僌偱偡偑丆俿俼偝傫偺偍偭偟傖偭偰傞偙偲偪傚偭偲傢偐傜側偄偺偱偡偑丆
壓婰偺傛偆偵棟夝偟偰傑偡丅
僒儞僾儕儞僌偺嵟彫偼丆俹俬俠偺僋儘僢僋悢偵埶懚偡傞偺偱丆
巹偑巊偭偰傞俹俬俠偼丆俉俵倛倸偱摦嶌偟偰傑偡偺偱丆
僋儘僢僋8MHz仺1僋儘僢僋0.125兪s仺1柦椷僒僀僋儖0.5兪s
侽丏俆兪倱傛傝抁偄婜娫偱偺僒儞僾儕儞僌偼偱偒傑偣傫偑丆
偙傟傛傝挿偗傟偽壜偲棟夝偟偰傑偡丅
亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖
堘偆庬椶偺俥俤俿傪拲暥偟偰偄傑偡丅
堦偮偼丆彅孼偺俫俹偁偭偨丆俁侽俀侽偺俥俤俿
傕偆堦偮偼丆僽儘僌偺曽偵彂偄偨丆抣抜偺嵎偺偁傞
俹倂俵偺僐儞僩儘乕儔乕偱偡丅
偪傚偭偲丆妝偟傒偱偡偑丆倃俋俠偼丆傑偩偲偳偒傑偣傫丅
傾儕偱偺峸擖偺曽偑傛偐偭偨偐側偁丅
俿俼偝傫丆偛巜揈偁傝偑偲偆偛偞偄傑偡丅
亜mabo偝傫丄丄丄丄
亜儘乕僷僗偲暪梡偱偡傛両両丂懡暘丅
偙傟丆僽儘僌偺曽偺丆婎杮廃攇悢偺曄姺偺僾儘僌儔儉偱偡偐丠丅
壗擭偐慜偵丆嵟弶偵庢傝慻傫偩帪偵丆偙傟偱偼傑傝傑偟偨丅
僾儘僌儔儉偼奜崙偺彅孼丆夞楬偼擔杮偺彅孼丆
偲偄偆慻傒崌傢偣偱丆儘乕僷僗僼傿儖僞乕擖傟偰丆傕偑偒傑偟偨丅
寢壥丆儘乕僷儖僼傿儖僞擖傟傞偲僨僕僞儖偺僒儞僾儕儞僌
偱偒側偔側傝傑偟偨丅
崱偼丆側傫偲側偔棟夝偱偒傞偺偱偡偑丒丒丒丒丒丒丒丅
偦傟偐傜丆僒儞僾儕儞僌偱偡偑丆俿俼偝傫偺偍偭偟傖偭偰傞偙偲偪傚偭偲傢偐傜側偄偺偱偡偑丆
壓婰偺傛偆偵棟夝偟偰傑偡丅
僒儞僾儕儞僌偺嵟彫偼丆俹俬俠偺僋儘僢僋悢偵埶懚偡傞偺偱丆
巹偑巊偭偰傞俹俬俠偼丆俉俵倛倸偱摦嶌偟偰傑偡偺偱丆
僋儘僢僋8MHz仺1僋儘僢僋0.125兪s仺1柦椷僒僀僋儖0.5兪s
侽丏俆兪倱傛傝抁偄婜娫偱偺僒儞僾儕儞僌偼偱偒傑偣傫偑丆
偙傟傛傝挿偗傟偽壜偲棟夝偟偰傑偡丅
亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖
堘偆庬椶偺俥俤俿傪拲暥偟偰偄傑偡丅
堦偮偼丆彅孼偺俫俹偁偭偨丆俁侽俀侽偺俥俤俿
傕偆堦偮偼丆僽儘僌偺曽偵彂偄偨丆抣抜偺嵎偺偁傞
俹倂俵偺僐儞僩儘乕儔乕偱偡丅
偪傚偭偲丆妝偟傒偱偡偑丆倃俋俠偼丆傑偩偲偳偒傑偣傫丅
傾儕偱偺峸擖偺曽偑傛偐偭偨偐側偁丅
mabo 2019/06/09(Sun) 09:23 No.1625
Re: 懕俉乕俹倂俵
栆媿儘僢僋偝傫
嫲弅偱偡偑丄幨恀晅偱丄愢柧婅偄傑偡丅
嫲弅偱偡偑丄幨恀晅偱丄愢柧婅偄傑偡丅
TR 2019/06/09(Sun) 09:44 No.1626
Re: 懕俉乕俹倂俵
mabo偝傫
500儅僀僋儘偼丄1553偵偁傞傉傠偖傜傓偱丄弶婜壔娭悢偵偁傝傑偡丅
栆媿儘僢僋偝傫偲偺傗傝庢傝偱丄x9c偺擻椡偲挳偄偰偄傑偟偨丅
暦偒娫堘偊偐傕偟傟傑偣傫偑丄x9c偼丄500儅僀僋儘傛傝丄抁帪娫偱偼丄摦嶌偟側偄偲巚偄傑偟偨丅
栆媿儘僢僋偝傫偵丄撍偭崬傫偱丄暦偗偽椙偐偭偨揰偱偡丅
INC偼500儅僀僋儘昁梫偐傕偟傟傑偣傫丅
******
栆媿儘僢僋偝傫
徻偟偔夝愢偟偰壓偝偄丅x9c偺僨乕僞僔乕僩偺壗張傪偳偺傛偆偵棟夝偟偨傜傛傠偟偄偐丅
500儅僀僋儘偼丄1553偵偁傞傉傠偖傜傓偱丄弶婜壔娭悢偵偁傝傑偡丅
栆媿儘僢僋偝傫偲偺傗傝庢傝偱丄x9c偺擻椡偲挳偄偰偄傑偟偨丅
暦偒娫堘偊偐傕偟傟傑偣傫偑丄x9c偼丄500儅僀僋儘傛傝丄抁帪娫偱偼丄摦嶌偟側偄偲巚偄傑偟偨丅
栆媿儘僢僋偝傫偵丄撍偭崬傫偱丄暦偗偽椙偐偭偨揰偱偡丅
INC偼500儅僀僋儘昁梫偐傕偟傟傑偣傫丅
******
栆媿儘僢僋偝傫
徻偟偔夝愢偟偰壓偝偄丅x9c偺僨乕僞僔乕僩偺壗張傪偳偺傛偆偵棟夝偟偨傜傛傠偟偄偐丅
TR 2019/06/09(Sun) 10:40 No.1627
Re: 懕俉乕俹倂俵
俿俼偝傫丆偼偄丆俿俼偝傫偑偍偭偟傖偭偰偨偺偼丆
倃俋俠偺俆侽侽兪倱偱偟偨偐丅
偙傟偼丆僒儞僾儕儞僌偱偼側偔丆
倃俋俠偑堦偮儚僀僷乕傪摦偐偡偺偵偐偐傞帪娫偲丆
巹偼棟夝偟傑偟偨丅
偱偡偐傜丆師偺摦嶌傑偱丆俆侽侽兪倱丂懸偮偺偩偲巚偭偰傑偟偨丅
摦嶌偺搑拞偱丆師偺柦椷偟偰傕丆庴偗晅偗側偄丆
偲巚偭偰傑偟偨丅
倃俋俠偺俆侽侽兪倱偱偟偨偐丅
偙傟偼丆僒儞僾儕儞僌偱偼側偔丆
倃俋俠偑堦偮儚僀僷乕傪摦偐偡偺偵偐偐傞帪娫偲丆
巹偼棟夝偟傑偟偨丅
偱偡偐傜丆師偺摦嶌傑偱丆俆侽侽兪倱丂懸偮偺偩偲巚偭偰傑偟偨丅
摦嶌偺搑拞偱丆師偺柦椷偟偰傕丆庴偗晅偗側偄丆
偲巚偭偰傑偟偨丅
mabo 2019/06/09(Sun) 12:27 No.1628
Re: 懕俉乕俹倂俵
mabo偝傫丄塃偵摨偠偱偡丅
TR 2019/06/09(Sun) 12:36 No.1629
Re: 懕俉乕俹倂俵
偦偺曈傝偼2偮偺抣偑婰嵹偝傟偰偄傑偡丅
柦椷帺懱偼1us偱椙偄敜偱偡丅
偦偺屻偵儚僀僷乕偑摦偄偰姰椆偡傞傑偱偑嵟戝500us偱偡丅乮昗弨偱100us乯
儚僀僷乕帺懱偼乬make-before-break乭摦嶌偱偡丅
偮傑傝丄師偺儚僀僷乕傪宷偄偱偐傜慜偺儚僀僷乕傪愗傝傑偡丅
仸昁偢偟傕懸偨側偗傟偽側傜側偄栿偱偼柍偄偲巚偄傑偡丅
偮傑傝丄乽懸偰乿偲彂偄偰偁傞傢偗偱偼偁傝傑偣傫丅
偗傟偳傕丄椺偊偽30儚僀僷乕偲偐傪楢懕乮2us乯娫妘偱柦椷傪擖傟傟偽丄暲楍偱悢儚僀僷乕宷偑傝丄弖娫揑偵掞峈偑壓偑傝傑偡丅
偦偺曈傝傪偳偆敾抐偡傞偐偱偡丅幚嵺偵偼巇條忋丄1偮偺儚僀僷乕摦嶌偱傕1偮暲楍忬懺偵偼側傝傑偡丅
巹偼丄妋幚偩偲巚偆曽朄傪彂偄偨偩偗偱偡丅
椺偊偽10us偱while儖乕僾傪夞偟偰傕摦嶌偼偡傞偲巚偄傑偡丅
柦椷帺懱偼1us偱椙偄敜偱偡丅
偦偺屻偵儚僀僷乕偑摦偄偰姰椆偡傞傑偱偑嵟戝500us偱偡丅乮昗弨偱100us乯
儚僀僷乕帺懱偼乬make-before-break乭摦嶌偱偡丅
偮傑傝丄師偺儚僀僷乕傪宷偄偱偐傜慜偺儚僀僷乕傪愗傝傑偡丅
仸昁偢偟傕懸偨側偗傟偽側傜側偄栿偱偼柍偄偲巚偄傑偡丅
偮傑傝丄乽懸偰乿偲彂偄偰偁傞傢偗偱偼偁傝傑偣傫丅
偗傟偳傕丄椺偊偽30儚僀僷乕偲偐傪楢懕乮2us乯娫妘偱柦椷傪擖傟傟偽丄暲楍偱悢儚僀僷乕宷偑傝丄弖娫揑偵掞峈偑壓偑傝傑偡丅
偦偺曈傝傪偳偆敾抐偡傞偐偱偡丅幚嵺偵偼巇條忋丄1偮偺儚僀僷乕摦嶌偱傕1偮暲楍忬懺偵偼側傝傑偡丅
巹偼丄妋幚偩偲巚偆曽朄傪彂偄偨偩偗偱偡丅
椺偊偽10us偱while儖乕僾傪夞偟偰傕摦嶌偼偡傞偲巚偄傑偡丅
栆媿儘僢僋 2019/06/09(Sun) 17:36 No.1630
Re: 懕俉乕俹倂俵
 俿俼偝傫丆栆媿儘僢僋偝傫丆偍偼傛偆偛偞偄傑偡丅
俿俼偝傫丆栆媿儘僢僋偝傫丆偍偼傛偆偛偞偄傑偡丅俿俼偝傫丆弶婜壔娭悢曄峏偟偰丆掞峈偳偆側傝傑偟偨偐丠
儚僀僷乕堦斣抂偵峴偭偰丆係侽兌偵側偭偨偱偟傚偆偐丅
巹偼丆X9C傑偩撏偐側偄偺偱丆
媈帡X9C嶌惉偟偰丆偁偦傫偱傑偟偨丅
巹偺PWM僐儞僩儘乕儔乕偺儃儕儏乕儉偲姺憰偟偰丆偄偠偭偰傒偨傜丆
夞揮悢偼丆
丂丂俋侽倠兌丂侾俀侽侽倰倫倣
丂丂俉侽倠兌丂係俁侽侽倰倫倣
丂丂俈侽倠兌丂俇侽侽侽倰倫倣
丂丂俇侽倠兌丂俈侽侽侽倰倫倣
丂丂俆侽倠兌丂俈俈侽侽倰倫倣
丂丂係侽倠兌丂俉侾侽侽倰倫倣
丂丂俁侽倠兌丂俉俆侽侽倰倫倣
丂丂俀侽倠兌丂俉俈侽侽倰倫倣
丂丂侾侽倠兌丂俋侾侽侽倰倫倣
丂兌偱彂偄偰傑偡偗偳丆侾侽倠兌偺掞峈侾侽屄偱丆
丂侾侽侽倠兌乮偍傛偦俋侽倠兌乯偵偼側傝傑偣傫偱偟偨偺偱丆
丂丂丂俋侽倠兌仺仺侾侽倠兌侾屄亖亖亖亖侾侽倠兌俋屄偺暘埑
丂偺寢壥偖傜偄偺堄枴偟偐側偄偲巚偄傑偡偑丆
丂偙傫側寢壥偱偟偨丅
丂
丂僌儔僼偵偟偰傒傞偲丆C僇乕僽偺儃儕儏乕儉偺僌儔僼
丂偵嬤偄孹岦偱偟偨丅
亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖亖
栆媿儘僢僋偝傫丆俿俼偝傫丆壓婰偺條側婰帠傪尒偮偗傑偟偨丅
https://www.cnczone.com/forums/mach-software-artsoft-software-/241922-pid-control-spindle-speed.html
偙偺彂偒崬傒偱偼丆 PID control 偼丆俽俽摍偱偼偱偒側偄
偺彂偒崬傒偱偟偨丅
僷儔儗儖偱帋偡偺丆柺搢偱偡偹偊丅
mabo 2019/06/10(Mon) 11:00 No.1633
Re: 懕俉乕俹倂俵
奆偝傫嵪傒傑偣傫偱偟偨丅
傗偼傝丄儘乕僷僗僼傿儖僞乕偼昁梫偱偟偨丅
PIC偺僾儘僌儔儉偼丄AD僐儞僶乕僞乕偱偟偨丅
側偺偱丄PIC偵擖傟傞怣崋偼儘乕僷僗僼傿儖僞乕偱傾僫儘僌壔偟側偗傟偽側傝傑偣傫丅
偡偭偐傝丄姩堘偄偟偰偄傑偟偨丅
SEC婎斅乣儘乕僷僗僼傿儖僞乕乮侾侽兪丒俀俀兌乯乣PIC乣x9c乣ML4
偱偟偨丅
仏仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊丄
亜儚僀僷乕堦斣抂偵峴偭偰丆係侽兌偵側偭偨偱偟傚偆偐丅
x9c偺侾倠兌傪捛壛偟傑偟偨偺偱丄
偙傟偑棃偨傜丄帋偡偮傕傝偱偡丅
庒偟丄岲揮偟側偔偰傕丄寁夋偼恑傔偰傒傑偡丅
ML4偺儌乕僞乕偑夞傟偽丄椙偟偲偟傑偡丅
梸傪尵偊偽丄幚嵺偵巊偊偨傜偄偄偺偱偡偑丅
崱夞偺寁夋偼丄暋嶨偱偡乮徫乯
偦傟偐傜丄
1633偺幚尡寢壥傪尒傞偲丄慡懱偺侾妱掱搙偺掞峈抣偼丄婥偵偟側偔偰傕傛偝偦偆偱偡偹丅
偲偄偆偺傕丄梊婜偟偰僗僺儞僪儖儌乕僞乕偑夞傞側傜丄偦傟偼偦傟偱偄偄偲巚偄傑偡丅
巭傑傜側偐偭偨傜丄傗偽偄偗偳丄偦偆偄偭偨帠偼側偄偱偟傚偆偐傜丅
棟桼
僾儘僌儔儉偱丄僗僺儞僪儖掆巭偺巜椷偑偁傞偲巚偆偐傜偱偡丅
傗偼傝丄儘乕僷僗僼傿儖僞乕偼昁梫偱偟偨丅
PIC偺僾儘僌儔儉偼丄AD僐儞僶乕僞乕偱偟偨丅
側偺偱丄PIC偵擖傟傞怣崋偼儘乕僷僗僼傿儖僞乕偱傾僫儘僌壔偟側偗傟偽側傝傑偣傫丅
偡偭偐傝丄姩堘偄偟偰偄傑偟偨丅
SEC婎斅乣儘乕僷僗僼傿儖僞乕乮侾侽兪丒俀俀兌乯乣PIC乣x9c乣ML4
偱偟偨丅
仏仏仏仏仏仏仏仏仏仏仏仏
mabo偝傫傊丄
亜儚僀僷乕堦斣抂偵峴偭偰丆係侽兌偵側偭偨偱偟傚偆偐丅
x9c偺侾倠兌傪捛壛偟傑偟偨偺偱丄
偙傟偑棃偨傜丄帋偡偮傕傝偱偡丅
庒偟丄岲揮偟側偔偰傕丄寁夋偼恑傔偰傒傑偡丅
ML4偺儌乕僞乕偑夞傟偽丄椙偟偲偟傑偡丅
梸傪尵偊偽丄幚嵺偵巊偊偨傜偄偄偺偱偡偑丅
崱夞偺寁夋偼丄暋嶨偱偡乮徫乯
偦傟偐傜丄
1633偺幚尡寢壥傪尒傞偲丄慡懱偺侾妱掱搙偺掞峈抣偼丄婥偵偟側偔偰傕傛偝偦偆偱偡偹丅
偲偄偆偺傕丄梊婜偟偰僗僺儞僪儖儌乕僞乕偑夞傞側傜丄偦傟偼偦傟偱偄偄偲巚偄傑偡丅
巭傑傜側偐偭偨傜丄傗偽偄偗偳丄偦偆偄偭偨帠偼側偄偱偟傚偆偐傜丅
棟桼
僾儘僌儔儉偱丄僗僺儞僪儖掆巭偺巜椷偑偁傞偲巚偆偐傜偱偡丅
TR 2019/06/10(Mon) 11:29 No.1634
Re: 懕俉乕俹倂俵
mabo偝傫傊
亜偙偺彂偒崬傒偱偼丆 PID control 偼丆俽俽摍偱偼偱偒側偄
僌乕僌儖東栿偱夝柧偟傛偆偲偟傑偟偨偑丄偪傫傉傫偐傫傉傫丅
偱傕丄mabo偝傫偺夝愢偺偲偍傝偱偟傚偆偐傜丄
儅僢僴偺PID偼丄帺暘偺SS偱偼柍棟偩偲傢偐傝傑偟偨丅
桳擄偆偛偞偄傑偡丅
亜偙偺彂偒崬傒偱偼丆 PID control 偼丆俽俽摍偱偼偱偒側偄
僌乕僌儖東栿偱夝柧偟傛偆偲偟傑偟偨偑丄偪傫傉傫偐傫傉傫丅
偱傕丄mabo偝傫偺夝愢偺偲偍傝偱偟傚偆偐傜丄
儅僢僴偺PID偼丄帺暘偺SS偱偼柍棟偩偲傢偐傝傑偟偨丅
桳擄偆偛偞偄傑偡丅
TR 2019/06/10(Mon) 13:52 No.1635
Re: 懕俉乕俹倂俵
 俿俼偝傫丆栆媿儘僢僋偝傫偙傫偽傫偼丅
俿俼偝傫丆栆媿儘僢僋偝傫偙傫偽傫偼丅慜婰帠偱丆俹俬俢偼俽俽偱偼摦偐側偄偺婰帠傪尒偮偗偨丆
偲彂偒傑偟偨丅
偦偺婰帠偼丆
Jeff Birt at Warp9 says that one cannot use the PID
control with an external motion control device (eg ESS)
側傫偱偡偗偳丆偙傟丆枖暦偒側傫偱偟傚偆偐偹丅
杮壠丂倂arp9丂偺僼僅乕儔儉偺偧偄偰傒偨偺偱偡偑丆
PID偺榖戣偑寢峔偱偰傑偡丅
傕偟摦偐側偄側傜丆榖戣偵側傜側偄傛偆側婥偑偟偰偒傑偟偨丅
MACH4偱偺僐儞僩儘乕儖偺條巕偱偡偑丆揧晅偺僌儔僼偑偁傝傑偟偨丅
傕偆偪傚偲偁偝偭偰傒傑偡丅
PID偺偙偲偵偮偄偰偼丆暘偐傝堈偄HP偑偁傝傑偟偨丅
http://www.picfun.com/motor05.html
侟mazon偵X9C偼偨偺傫偩偺偱偡偑丆傑偩偒傑偣傫丅
偄傠偄傠偁偝偭偰偨傜丆暿側暔尒偮偗偨偺偱丆
偦傟丆捛壛偱拲暥偟傑偟偨丅
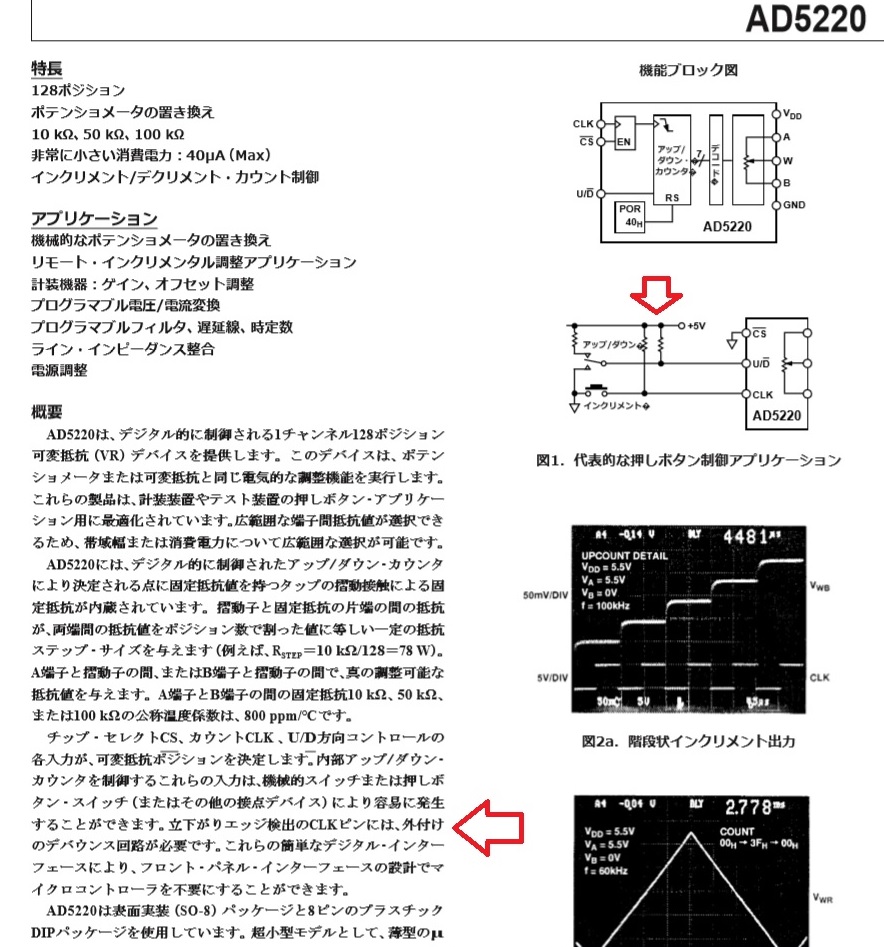
https://jp.rs-online.com/web/p/digital-potentiometers/5236816/
儅僯儏傾儖傕擔杮岅偺偁傝傑偟偨丅
https://www.analog.com/media/jp/technical-documentation/data-sheets/AD5220_JP.pdf
暘偐傟偽丆偙偪傜棅傫偩偺偵偲丆巚偄傑偟偨丅
mabo 2019/06/10(Mon) 23:47 No.1636
Re: 懕俉乕俹倂俵
 mabo偝傫丄偍偼傛偆偛偞偄傑偡丅
mabo偝傫丄偍偼傛偆偛偞偄傑偡丅帺暘偺x9c偱偡偑丄夡傟偰偟傑偭偨傛偆偱丄
嶐斢偐傜丄x9c偵偮側偘偨儌僯僞乕梡LED偑揰摂偟側偔側傝傑偟偨丅
庢愢丄偁傝偑偲偆偛偞偄傑偡丅
INC丒UD偼丄僾儖傾僢僾偟側偄偲偄偗側偄傛偆偱偡偹丅
憗懍丄INK/UD偑偮側偑偭偰偄傞PIC偺奺僺儞傪僾儖傾僢僾偵曄峏偟傑偡丅
偦傟偲丄UP/DOWN偺偒偭偐偗偼丄棫壓傝僄僢僕専弌偺CLK亖INK偲側偭偰偄傑偡偹丅
偙傟偱丄弶婜壔娭悢偵偁傞伀偺堄枴偑暘偐傝傑偟偨丅
for (char i = 0; i < 100; i++) {
inc = 0;
__delay_us(1);
inc = 1;
__delay_us(500);
}
亜暘偐傟偽丆偙偪傜棅傫偩偺偵偲丆巚偄傑偟偨丅
崱夞偼丄斾妑揑偵掅楑側彜昳偱傛偐偭偨偱偡偹丅
僶僀僋偺曽偼丄偦偆偼偄偒傑偣傫丄傛偔傗傝傑偟偨傛乮徫乯
TR 2019/06/11(Tue) 06:24 No.1637
Re: 懕俉乕俹倂俵
mabo偝傫傊丄丂傕偆堦審幐楃偟傑偡丅
俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
偙偺棳傟偱丄儘乕僷僗僼傿儖僞乕偼惉岟偟傑偟偨偐丠
惉岟偟偰偄傞傛偆偱偁傟偽丄C偲R偺悢抣傪嫵偊偰偔偩偝偄丅
傑偨丄僇僢僩僆僼廃攇悢傕暘偐傟偽偍婅偄偟傑偡丅
偲偄偆偺傕丄伀偺婰帠偑栚偵巭傑傝傑偟偨丅
No1625
僾儘僌儔儉偼奜崙偺彅孼丆夞楬偼擔杮偺彅孼丆
偲偄偆慻傒崌傢偣偱丆儘乕僷僗僼傿儖僞乕擖傟偰丆傕偑偒傑偟偨丅
寢壥丆儘乕僷儖僼傿儖僞擖傟傞偲僨僕僞儖偺僒儞僾儕儞僌
偱偒側偔側傝傑偟偨丅
俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
偙偺棳傟偱丄儘乕僷僗僼傿儖僞乕偼惉岟偟傑偟偨偐丠
惉岟偟偰偄傞傛偆偱偁傟偽丄C偲R偺悢抣傪嫵偊偰偔偩偝偄丅
傑偨丄僇僢僩僆僼廃攇悢傕暘偐傟偽偍婅偄偟傑偡丅
偲偄偆偺傕丄伀偺婰帠偑栚偵巭傑傝傑偟偨丅
No1625
僾儘僌儔儉偼奜崙偺彅孼丆夞楬偼擔杮偺彅孼丆
偲偄偆慻傒崌傢偣偱丆儘乕僷僗僼傿儖僞乕擖傟偰丆傕偑偒傑偟偨丅
寢壥丆儘乕僷儖僼傿儖僞擖傟傞偲僨僕僞儖偺僒儞僾儕儞僌
偱偒側偔側傝傑偟偨丅
TR 2019/06/11(Tue) 07:30 No.1638
Re: 懕俉乕俹倂俵
俿俼偝傫丆偍偼傛偆偛偞偄傑偡丅
俿俼偝傫丆庢愢偼丆倃俋俠偺傕偺偱偼側偄偺偱丆
偍娫堘偄偺側偄傛偆偵丅
俙俢俆俀俀侽偲偄偆宆斣偺傕偺偱偡丅
亜俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
幚婡偑撏偄偰側偄偺偱丆俴俤俢偱偺俹俬俠偺摦嶌妋擣偱偡偑丆
俽俽仺仺儘乕僷僗僼傿儖僞乕仺仺俹俬俠俙俢曄姺仺俴俤俢
偱丆摦嶌偺妋擣偼偟偰傑偡丅
倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
偺晹暘偑枹妋擣偱偡丅
儘乕僷僗僼傿儖僞乕偼丆俀侽倠偲侾侽兪俥丂偩偭偨偲巚偄傑偡丅
儘乕僷僗僼傿儖僞乕偄傟偰丆偩傔偩偭偨偺偼丆
崱峫偊傞偲摉偨傝傑偊側偺偱偡偑丆僨僕僞儖偱庴偗偨偐傜偱偡丅
儘乕僷僗僼傿儖僞乮擔杮偺彅孼偺攝慄恾乯仺仺僨僕僞儖庴偗乮奜崙偺彅孼偺僾儘僌儔儉乯
偱偺幐攕偱偡丅儘乕僷僗僼傿儖僞乕偵巊偭偨掞峈偲僐儞僨儞僒乕偺慖戰偺幐攕偱偼側偔偱丆
傾僫儘僌仺僨僕僞儖
偺側偑傟偱偺偁偨傝傑偊偺幐攕偱偟偨丅崱廡偵偼丆
倃俋俠傕俙俢俆俀俀侽傕撏偔偲巚偄傑偡偺偱丆妋擣偟傛偆偲巚偭偰傑偡丅
偦傟偐傜丆僷儔儗儖偱偺俹俬俢偺専徹傕偟偨偄偲巚偭偰傑偡丅
俿俼偝傫丆庢愢偼丆倃俋俠偺傕偺偱偼側偄偺偱丆
偍娫堘偄偺側偄傛偆偵丅
俙俢俆俀俀侽偲偄偆宆斣偺傕偺偱偡丅
亜俽俤俠仺儘乕僷僗僼傿儖僞乕仺俹俬俠俙俢曄姺仺倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
幚婡偑撏偄偰側偄偺偱丆俴俤俢偱偺俹俬俠偺摦嶌妋擣偱偡偑丆
俽俽仺仺儘乕僷僗僼傿儖僞乕仺仺俹俬俠俙俢曄姺仺俴俤俢
偱丆摦嶌偺妋擣偼偟偰傑偡丅
倃俋俠仺僐儞僩儘乕儔乕仺揔摉側俢俠儌乕僞乕
偺晹暘偑枹妋擣偱偡丅
儘乕僷僗僼傿儖僞乕偼丆俀侽倠偲侾侽兪俥丂偩偭偨偲巚偄傑偡丅
儘乕僷僗僼傿儖僞乕偄傟偰丆偩傔偩偭偨偺偼丆
崱峫偊傞偲摉偨傝傑偊側偺偱偡偑丆僨僕僞儖偱庴偗偨偐傜偱偡丅
儘乕僷僗僼傿儖僞乮擔杮偺彅孼偺攝慄恾乯仺仺僨僕僞儖庴偗乮奜崙偺彅孼偺僾儘僌儔儉乯
偱偺幐攕偱偡丅儘乕僷僗僼傿儖僞乕偵巊偭偨掞峈偲僐儞僨儞僒乕偺慖戰偺幐攕偱偼側偔偱丆
傾僫儘僌仺僨僕僞儖
偺側偑傟偱偺偁偨傝傑偊偺幐攕偱偟偨丅崱廡偵偼丆
倃俋俠傕俙俢俆俀俀侽傕撏偔偲巚偄傑偡偺偱丆妋擣偟傛偆偲巚偭偰傑偡丅
偦傟偐傜丆僷儔儗儖偱偺俹俬俢偺専徹傕偟偨偄偲巚偭偰傑偡丅
mabo 2019/06/11(Tue) 09:40 No.1639
Re: 懕俉乕俹倂俵
mabo偝傫
傕偆偦傠偦傠偔傞偲偄偆偙偲偱丄偪傚偭偲丅
弶婜壔娭悢偵婥偵側傞揰偑偁傝傑偡丅
x9c偵揹尮傪擖傟偰捈偖偵丄儌僯僞乕梡led偑揰摂偟傑偡丅偨偩丄幚嵺偺塭嬁偼丄掕偐偱偁傝傑偣傫丅
儘乕僷僗僼傿儖僞乕偺忣曬桳傝擄偆偛偞偄傑偡丅
幚嵺丄僗僺儞僪儖偑夞傞偐丠
傕偆偦傠偦傠偔傞偲偄偆偙偲偱丄偪傚偭偲丅
弶婜壔娭悢偵婥偵側傞揰偑偁傝傑偡丅
x9c偵揹尮傪擖傟偰捈偖偵丄儌僯僞乕梡led偑揰摂偟傑偡丅偨偩丄幚嵺偺塭嬁偼丄掕偐偱偁傝傑偣傫丅
儘乕僷僗僼傿儖僞乕偺忣曬桳傝擄偆偛偞偄傑偡丅
幚嵺丄僗僺儞僪儖偑夞傞偐丠
TR 2019/06/11(Tue) 10:06 No.1640